基于最大相关熵准则的水下生物脉冲噪声消除方法
2021-11-08 08:50高世杰朱雨男徐千驰
声学技术 2021年5期
高世杰,王 彪,朱雨男,陈 宇,徐千驰,王 武
(江苏科技大学电子信息学院,江苏 镇江 212003)
0 引 言
近年来的研究表明,近海水下生物噪声多以鳌虾之类带有前螯的生物,通过瞬间闭合前螯产生极高压的冲击噪声为主[1]。这类脉冲噪声不再符合高斯分布模型,持续时间短,冲击幅度大,频域占据2~300 kHz[2],对近海水下通信造成了极大的困扰,因此,如何有效消除脉冲噪声,有着重要的实际应用意义。
文献[3]分析了由于脉冲噪声的存在,可能会造成整个正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)系统整体的通信性能的降低。因为脉冲噪声造成的误差远大于高斯噪声,干扰信号经过离散傅里叶变换后,会使得OFDM子载波分量具有大的方差,进而影响该子载波或者整个OFDM载波的符号。
关于脉冲噪声的消除研究,一种常用的方法是进行阈值检测即门限电平的选取,然后用减法器在接收端进行脉冲噪声的消除,这类算法的核心问题是如何选取一个合适的阈值,阈值的选择是目前该类方法的一个瓶颈[4-6]。随着稀疏重构和压缩感知的发展,利用脉冲噪声的稀疏特性,对噪声进行重构,在接收信号中减去重构的脉冲噪声便完成了干扰消除工作[7-8]。但是压缩感知的前提条件是需要知道信号的稀疏度,而这是脉冲噪声不确定的点,因此,该方法的使用也受到了一定的限制。
基于自适应滤波器原理的自适应噪声消除(Adaptive Noise Cancellation,ANC)方法不需要预先知道信号和噪声的任何先验知识就可以将噪声信号从通信系统中消除[9]。基于最小均方误差(Minimum Mean Square Error,MMSE)的最小均方(Least Mean Square,LMS)算法利用期望信号和滤波器输出之间误差的二阶矩,来完成这一工作,但是基于 MMSE准则的算法在非高斯的脉冲噪声情况下很难保持通信的性能[10]。存在脉冲噪声干扰时,直接采用基于 LMS算法的自适应滤波算法会使得算法的收敛性能受到脉冲噪声采样位置的影响,进而噪声消除效果较差[11]。针对这一类噪声的处理,随着信息学习理论(Information Theoretic Learning,ITL)的发展,信息量可以作为代价函数来完成自适应滤波系统的训练[12]。最大熵准则(Maximum Correntropy Criterion,MCC)算法作为信息论中的一个熵准则,能够利用误差信号有效地消除脉冲噪声的干扰[13]。本文根据水声信道的稀疏特性,先是提出对自适应滤波器的代价函数添加了稀疏约束项,用来进行信道估计;然后提出了一种级联滤波器的设计,第一级滤波器作为自适应噪声消除器,借助于对脉冲噪声的参数估计实现噪声的近似估计,从而达到去噪的目的;最后将去噪后的信号通过基于稀疏约束项的第二级滤波器,实现稀疏信道估计,完成通信过程。
1 基本原理
1.1 最大熵原理


其中:E[·]表示进行期望运算,FXY(x,y)表示(X,Y)的联合分布函数,κ(x,y)表示核函数。核函数有许多表达式,本文采用核函数的高斯形式:

其中:误差e=x-y,定义从FXY中提取的N个样本,σ>0代表核宽度。图1为不同核宽度下的核函数。
由图1可以看出,在不同核宽度下的高斯核函数曲线的收敛速度不同。在自适应滤波算法当中,将核函数作为自适应算法更新的代价函数,对于突变型的误差,核函数有着比 MMSE准则更好的鲁棒性:MMSE准则对误差比较敏感,因此在高斯环境下性能表现较好,因为在脉冲噪声的干扰下,误差信号会呈现较大的突变,这种突变会导致算法稳定性下降,甚至发散。使用高斯核函数作为代价函数,由图1可知,将误差映射到高斯曲线中,当误差较大的时候,核函数对应为较小的甚至接近0的值,从而使得算法不受误差突变的影响,在脉冲噪声环境下有着较好的稳定性。
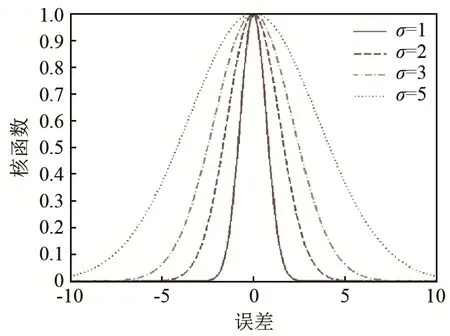
图1 不同核宽度下的高斯核函数曲线Fig.1 Gaussian kernel function curves for different kernel widths
1.2 自适应滤波器原理
输入信号通过一个受到脉冲噪声干扰的未知系统时,有[16]:

其中:df(k)=uT(k)h0是无噪声信号,u(k)=[u(k)u(k+1)…u(k-M+1)]T表示输入信号,T代表转置符号,h0=[h1,h2,...,hM]T代表未知系统的频率响应,M代表h0的长度,η(k)代表脉冲噪声,对于误差信号有[16]:

其中:h(k)表示第k次迭代对h0的估计值。自适应算法的目标是通过不断更新对h0的估计值,h能够更好地逼近h0,使得误差最小且趋于稳定,自适应算法的权值公式为[16]

MCC算法代的价函数为

式(6)属于凸函数,要使得误差函数最小,等价于求代价函数的最大值,通过代价函数对权值求偏导,由式(5)和式(6)得到 MCC 的权值更新公式[16]为

其中:μ是步长,也称为收敛因子,μ的取值大小将直接影响到算法收敛速度的快慢。
1.3 脉冲噪声模型及参数估计
关于近海环境噪声的研究表明,单一的高斯噪声模型无法满足近海环境的表述,近海环境噪声多表现为非高斯噪声的脉冲噪声[3]。通常用Alpha稳定噪声模型来表示浅海脉冲噪声,Alpha稳定分布噪声是一类带有线状尖峰且具有重尾效应的随机噪声[4]。由于不存在显式的概率密度函数,这里用特征函数[17]来进行描述,即
噪声模型可以表示为N=(α,β,γ,δ)。其中:α∈(0,2]为特征指数,用来表示分布函数拖尾的厚度,α越小,重尾分布越严重。β∈[-1,1]是对称参数,β=0时,稳定分布是关于α对称的,在这种情况下的分布成为Alpha稳定分布。γ>0是比例参数,也称为分散系数,它表示的意义与高斯分布的方差类似。-∞<δ<∞是位置参数。
对脉冲噪声进行参数估计,基本思想是通过采样到的样本序列估计特征函数,然后对特征函数的实部和虚部采用回归的方法估计出参数值[17]。由特征函数可得:

2 基于稀疏约束的最大熵准则算法

其中:λ表示拉格朗日因子,在这里λ取正数,其作用类似于步长,也有控制收敛速度和维持稳态平衡的作用。式(12)右边第二项对权值求偏导可得:

对公式(12)求偏导,得到权值更新公式:

本文将式(15)等号右边最后一项称作0吸引因子,因为它总是使得权值向0靠近。因为h(k)呈现出稀疏特性,每次迭代,当hm(k)为正数时,hm(k+1)则减少μλ;当hm(k)为负数时,hm(k+1)则增加μλ。总之,目的就是将h(k)向0迫近。
3 系统设计和仿真
3.1 信噪比函数
因为Alpha稳定分布二阶及二阶以上的矩为无穷量,所以高斯噪声环境下的方差、相关函数等传统统计方法不再适用于 Alpha稳定分布的随机过程。因此,这里用另一种信噪比函数来衡量脉冲噪声与有用信号的信噪比(Signal to Noise Ratio,SNR)[18]:

根据文献[2-3]对浅海噪声进行建模,普遍认为脉冲噪声的α取值范围在1.6~1.9之间,文献[2]在不同近海地域检测到的脉冲噪声用Alpha稳定分布表示时,具体参数为N1=(1.86,0,0.089,0)和N2=(1.82,0,0.0317,0),具体脉冲形式如图2和图3所示。通过图2、3可以看出,α值越小,脉冲效果越明显。在脉冲噪声为N1时,脉冲个数多且单个脉冲幅值较小;在脉冲为N2时,脉冲个数较少且单个脉冲幅值较大。本文选择N1=(1.86,0,γ,0)和N2=(1.82,0,γ,0),用来表征不同信噪比下的脉冲噪声。

图2 参数为N1时的脉冲噪声Fig.2 Impulse noise when the parameter is N1
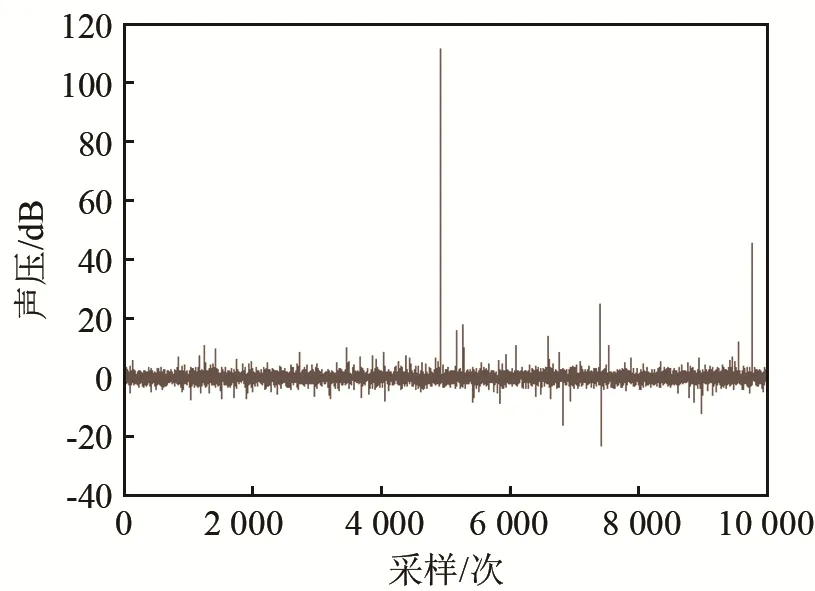
图3 参数为N2时的脉冲噪声Fig.3 Impulse noise when the parameter is N2
3.2 数据帧设计
通信系统数据帧结构的设计如图4所示。接收端在信号同步以后,先通过训练序列和数据部分两端均为0的保护序列得到脉冲噪声n,然后采用参数估计,得到训练序列和数据部分的脉冲噪声n2(注意,这里通过参数估计得到的脉冲噪声n2和训练序列和数据部分真实的脉冲噪声n1理论上不可能等同,只是同一个参数模型下的两段噪声信号);训练序列用来进行信道估计,具体的系统实现结合本文设计的级联滤波器结构。

图4 信号的发送序列设置Fig.4 Signal transmission sequence settings
3.3 系统结构设计
本文在接收端设计一个级联的自适应滤波器结构。第一级滤波器完成对噪声干扰的消除,第二级滤波完成对水声信道的信道估计。两个级联的滤波器实际是应用了自适应滤波器的噪声抵消和对未知系统频率响应函数的估计两个方面。
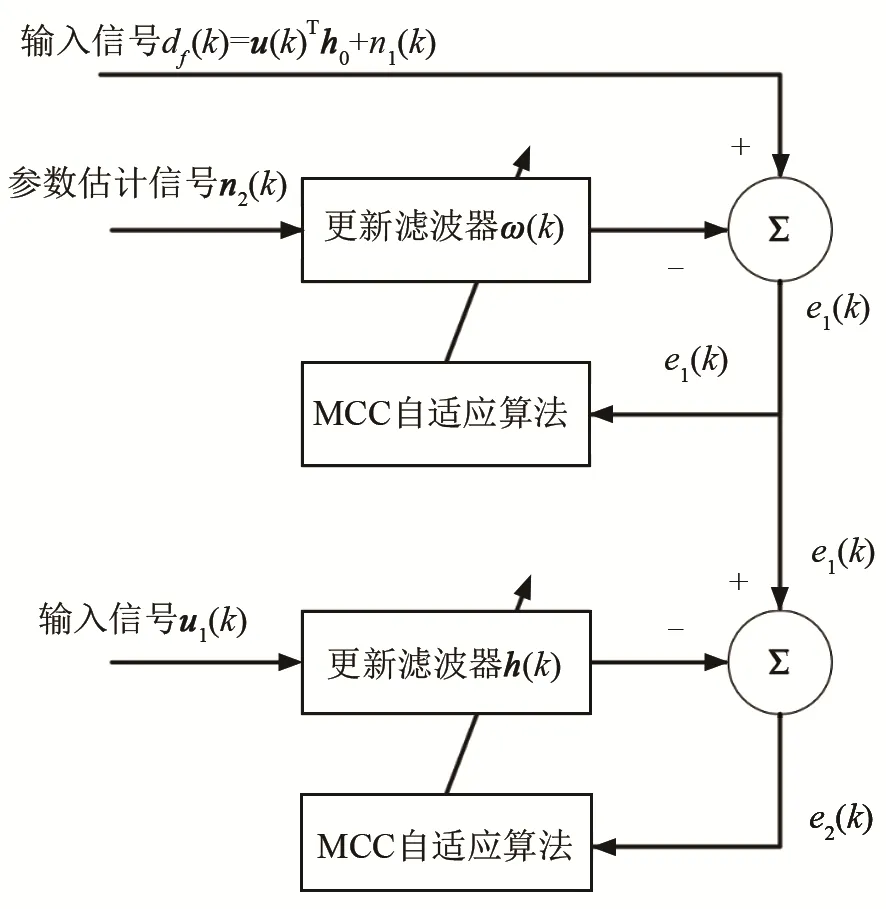
图5 级联滤波器系统图Fig.5 Block diagram of cascade filter system
3.4 仿 真
依据经验,将步长μ设置为0.005;在稀疏自适应算法中λ设置为0.01;核宽度σ设置为5;稀疏信道的长度设置为40,稀疏度设置为5。
本文采用OFDM的调制和解调,具体参数设置为:子载波个数200;每个子载波含符号数为12;采用16QAM映射,从而生成二进制序列的长度为9 600;考虑水听器采用单发送单接收,为了使得送往发送端的信号为实数形式,在快速傅里叶逆变换(Inverse Fast Fourier Transform,IFFT)前,需要增加发送信号的共轭信号,傅里叶变换点数满足大于两倍的子载波数,这里设置为 512;保护间隔与OFDM数据的比例为1/4;后缀长度为20;同时为了加快信号功率谱边沿的下降速度,添加窗函数滚降系数为1/32的矩形窗。发送帧按如下设置:根据OFDM参数设置,发送端生成的有用信号长度为12×(512+512×1/4)+20=7700;采用线性调频做同步信号;将训练序列长度设置为1 000;前后为0的保护序列长度各设置为1 000;从而推得所用的训练序列仅占传输信号(有用数据信号和训练序列)的11.5%。
噪声采用N1=(1.86,0,γ,0)和N2=(1.82,0,γ,0)来比较不同脉冲噪声参数下的算法性能,离散信号功率计算公式为

同时结合式(15)验证提出算法及系统设计在脉冲噪声下的误码率情况。
仿真部分采用四种方案设计,第一种为单一的最小二乘(Least Square,LS)信道估计,没有添加任何自适应噪声消除的设计;第二种为添加自适应噪声消除后的最小二乘(Adaptive Noise Cancellation and Least Square,ANC-LS)方案设计,用来表征噪声消除方案的优越性;第三种为单一的稀疏约束最大熵准则MCC方案设计,用于表征本文提出的稀疏信道估计算法比传统LS算法的性能优越;第四种为本文设计方案,信号先是通过自适应噪声消除滤波器,然后进行稀疏信道估计。接收端经解调后,当噪声参数为N1时,在不同信噪比下二进制信号错误个数以及误码率曲线分别如表1和图6所示;当噪声参数为N2,在不同信噪比下二进制信号错误个数以及误码率曲线分别如表2和图7所示。

表1 脉冲噪声参数为N1时不同信噪比下解调后二进制信号错误个数Table 1 Number of binary signal errors after demodulation under different signal-to-noise ratios when the impulse noise parameter is N1
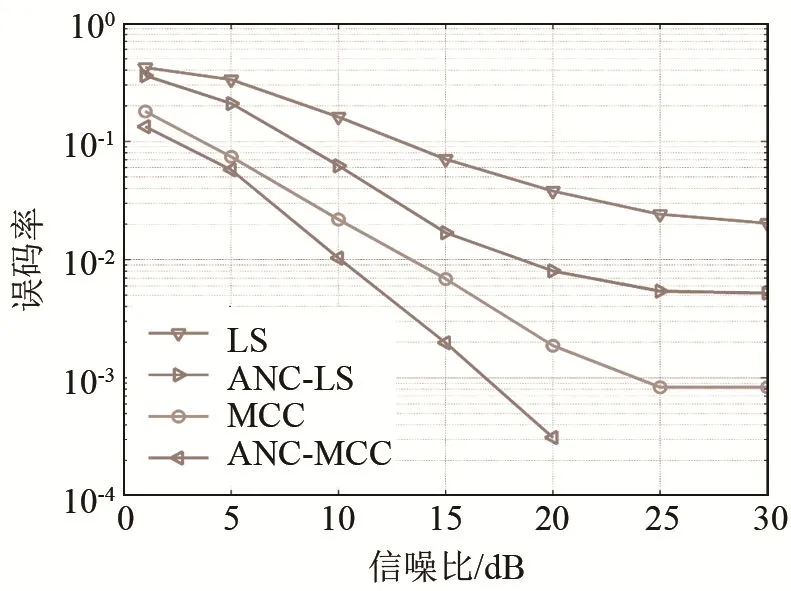
图6 脉冲噪声参数为N1时不同信噪比下误码率曲线Fig.6 Bit error rate curves under different signal-to-noise ratios when the impulse noise parameter is N1
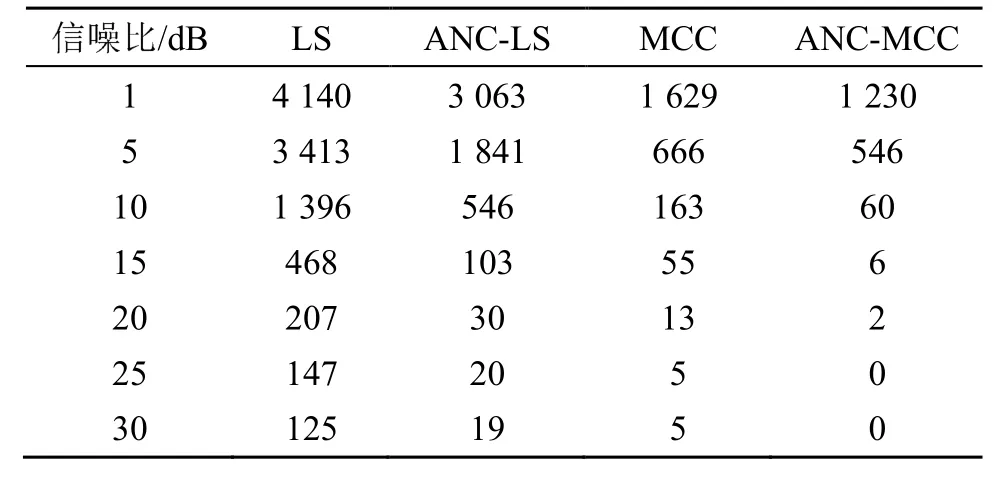
表2 脉冲噪声参数为N2时不同信噪比下解调后二进制信号错误个数Table 2 Number of binary signal errors after demodulation under different signal-to-noise ratios when the impulse noise parameter is N2
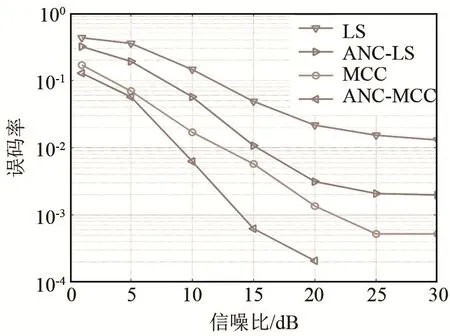
图7 脉冲噪声参数为N2时不同信噪比下误码率曲线Fig.7 Bit error rate curves under different signal-to-noise ratios when the impulse noise parameter is N2
从图6和图7可以得出,在不同的噪声参数下,传统LS算法在脉冲噪声下的效果最差,性能受噪声的干扰最为严重,同时验证了文献[3]中所提的脉冲噪声,会因为经过离散傅里叶变换后进而影响整个通信系统的性能;在LS算法中添加自适应噪声消除系统,能够对噪声起到一定的消除作用,通信系统的误码率整体比LS算法低;由于熵函数对脉冲噪声或者说是对瞬间突变的误差有着较好的鲁棒性,本文提出的基于稀疏约束的最大熵准则信道估计算法有着比LS算法更好的性能;在进行信道估计前先进行噪声消除,即本文提出的级联滤波器结构,比前三种算法性能更好,误码率曲线最低。
分析图6,噪声参数为N1时,横向对比,当误码率为10-2时,本文提出的级联滤波器结构能够在信噪比为10 dB左右时达到,单一最大熵信道估计在信噪比为13 dB左右时才达到,通过噪声消除后的LS算法要在信噪比为17 dB时才能达到。在误码率缩小到10-3时,本文提出的级联滤波器结构同样优于其他三种方案。纵向对比,当信噪比相同时,LS算法性能最差,本文提出的级联滤波器方案性能最好,能够满足通信的性能要求。图7也表明本文提出的方案性能优于其他三种方案。
在不同噪声参数下,通过对比表1和表2的具体二进制信号误码个数,可以看出表2整体上误码个数要比表1低。这是因为在分析图2和图3时得出关于不同噪声参数下脉冲的个数多少以及幅值高低关系,在本文采用熵函数能够很好地将较大的脉冲噪声进行限制,从而保证算法能够在不同脉冲噪声参数下有着较好的性能。
4 结 论
为了消除脉冲噪声,降低通信系统的误码率,本文提出了采用基于最大熵准则的级联自适应滤波器结构来实现脉冲噪声干扰的抵消,并且提出一种稀疏约束的最大熵准则代价函数,来实现脉冲噪声消除后的水声稀疏信道估计。仿真实验表明,在训练序列占传输信号比例为11.5%的情况下,提出的方法能够在低信噪比的情况下产生较低的误码率,比传统的方法有着更好的通信性能。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
雷达与对抗(2022年1期)2022-03-31
通信学报(2020年10期)2020-11-03
北京航空航天大学学报(2019年9期)2019-10-26
计算机与数字工程(2019年7期)2019-07-31
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
雷达学报(2017年3期)2018-01-19
舰船电子对抗(2016年6期)2017-01-18