基于图像分析的篮球进球识别研究
2021-12-01 09:49蓝开辉
怀化学院学报 2021年5期
蓝开辉
(泉州幼儿师范高等专科学校,福建泉州362000)
计算机技术的普及,使得计算机视觉技术被广泛应用于各个领域,如目标检测、物体运动跟踪等.但由于篮球进球过程属于运动过程,仅通过基础的图像处理技术难以实现对篮球进球的准确和及时判断.另外,传统的目标检测方法,如背景差分法[1]、光流法[2]、帧间差分法[3]等,由于篮球进球路径不确定且速度时变性较强,不适用于本研究的篮球进球识别.因此,有必要提出一种准确识别篮球进球的新方法.本研究根据篮球进球特点,提出一种基于图像分析的篮球进球识别算法.针对篮球进球识别中篮球目标检测,提出一种基于背景差分法与三帧差分的结合算法,以解决篮球进球路径不确定且速度时变性较强的问题;针对篮球进球识别中篮筐目标检测,采用Hough圆变换进行标定;最后,通过图像处理,提出基于图像分析的篮球进球识别算法,以实现篮球进球的准确识别.
1 基本算法
1.1 背景差分和帧间差分结合算法
篮球进球识别首先需对篮球和篮筐进行目标检测.由于篮球属运动目标,篮筐属静态圆形目标,因此需采用不同的方法对目标进行检测.常用的运动目标检测方法包括背景差分法、帧间差分法等,但由于篮球速度时变性强,且受室外光线等因素的影响,单一的方法虽可检测到运动篮球,但往往达不到检测精度需求.因此,结合以上两种算法的优点[4],提出一种基于结合算法的篮球目标检测.具体步骤为:
第一步:采用中值滤波等图像处理方法对视频图像进行预处理,以去除图像中的噪声,提高后续目标检测的准确度;
第二步:选取一个固定的图像作为背景图像Bn(x,y),并选取连续的三帧图像Fn-1(x,y),Fn(x,y),Fn+1(x,y);
第三步:采用背景差分法对其进行差值计算,得到运动目标FD(x,y).FD(x,y)的计算方式如式(1):

第四步:采用三帧差分法分别计算Fn(x,y)与Fn-1(x,y)的差值和Fn(x,y)与Fn+1(x,y)的差值,将差值进行式(2)操作,得到目标的变化量FG′(x,y);

第五步:采用式(3)对FG′(x,y)进行二值化;

第六步:将FG(x,y)与FD(x,y)进行交集,得到目标运动的区域图像(x,y):

1.2 Hough圆变换
篮筐属静态圆形目标,因此采用Hough圆变换进行检测.而之所以采用Hough圆变换法,是因为Hough圆变换是一种检测图像中圆、直线、椭圆等形状的边缘检测方法,通过转换图像中的曲线到参数空间,检测参数空间的极值点,从而对曲线位置进行确定,最终提取规则曲线,使曲线更容易识别和检测[5,6].该方法的具体描述为:
圆的一般方程式如式(5),(a,b)表示圆心,r表示圆的半径.

采用Hough圆变换将该平面上的圆转换到a-br参数空间,则平面空间中经过(x,y)的原对应的参数空间就形成了一个三维锥面,如图1所示.
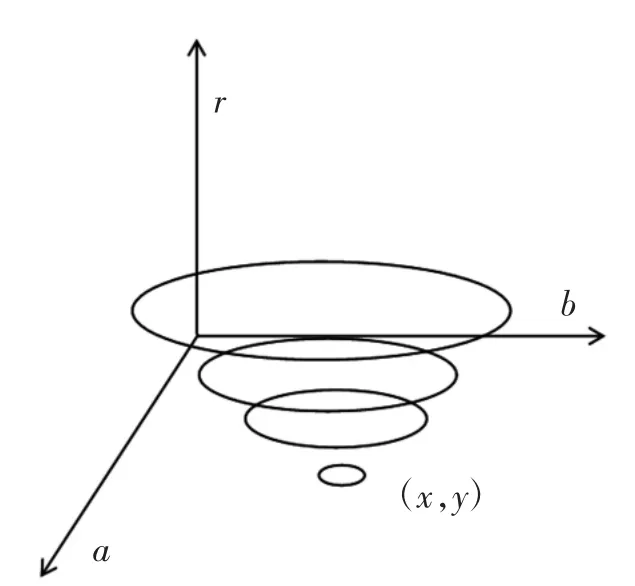
图1 Hough圆变换
以此类推,图像平面空间中任意一点均对应参数空间一个三维锥面.由此可知,在参数空间存在对应的三维锥面使过图像空间的同一点圆在r高度必然相交于点(a,b,r).通过检测该点,即可得到圆的参数,进而可确定圆的曲线.
2 篮球进球识别模型构建
在对篮球目标检测后,需对篮球数据进行特征提取,然后比较提取的特征参数与设定的篮球进球系统配置的参数,即可判断篮球是否进球.
2.1 篮球特征提取
设篮球在X、Y方向的最小像素与最大像素坐标分别为min(x)、min(y)和max(x)、max(y);直径像素点总数分别为Ball_Pixel(X)、Ball_Pixel(Y),其计算方法如式(6):

在篮球筐中连接坐标点(x1,y1)和(x2,y2)形成一条直径线段,并通过式(7)计算线段上两点间的像素点总数:

建立篮球实际直径尺寸(L=45 cm)长度与图像中篮球筐直径像素总数的对应关系,如式(8).

判断篮球是否进球的决定参数是篮球进球时篮球直径在图像中的实际尺寸大小.

2.2 篮球进球图像采集
在判断篮球进球过程中,系统配置参数则为篮球进球识别值.不同的图像采集安装位置,系统配置的参数不同.本研究将篮球图像采集的相机安装在篮筐正上方,如图2所示,并将系统配置参数Ball_r设置为0.5 cm.

图2 相机安装位置
2.3 篮球进球识别
篮球进球识别即判断篮球是否进入篮筐.篮球是否进入篮筐存在三种情况:一是篮球全部进入篮筐中;二是篮球部分进入篮筐中,三是篮球处于篮筐外.由于第三种情况特殊,篮球处于篮筐外,因此通过区域分向像素的总数不同,计算X与Y方向像素总数值K的范围,进而对篮球是否进球进行判断.K值的计算方法如式(10)[7,8].

当篮球属于第一种情况时,即篮球全部进入篮筐,算法可将篮球筐分割出来,使系统检测不到没进篮筐的篮球对应像素点,从而直接识别为未进球[9,10].针对第二种情况和第三种情况,若此时篮球与篮筐之间有接触,K值的范围是(0.9,1.1),若篮球与篮筐之间没有接触,K值约为1.当K值在(0.9,1.1)之间时,篮球进入篮筐范围内.通过系统配置参数Ball_TimFactor计算篮球的Ball_R值,并与设定值Ball_r进行比较.若Ball_R<Ball_r,系统延时0.2 ms,并再次比较Ball_R值与Ball_r值大小;当Ball_R<Ball_r,判断此次投篮为进球.此时,Ball_Num自动增加一次计数,并结束此次识别.
整个识别过程中,两次比较Ball_R值与Ball_r值的原因,是为解决投篮中篮球以篮筐为支点旋转到篮筐外的问题,从而避免误判此类情况为进球的情况,提高识别的精准度.
3 仿真实验
3.1 实验环境搭建
本研究的图像采集设备采用分辨率及帧率为640*480时60帧/s,可支持Windows8的免驱M30A相机;选用CPU为i5-7200U@2.5 GHz、内存大于4 G的计算机对采集图像进行处理;在MATLAB上对图像进行分析与处理.
3.2 图像来源及预处理
基于图2的图像采集部署,采集来自左、中、右三个方向的投篮视频各10组,每组数据时长90 s.
3.3 结果与分析
3.3.1 篮球目标检测结果
为验证提出的背景差分与三帧差分结合算法目标检测的有效性,研究采用该算法对左投篮第一组视频图像中第34和第176帧图像进行篮球目标检测,结果如图3所示.由图3看出,本研究提出的算法可有效检测运动中的篮球.

图3 篮球目标检测结果
3.3.2 篮筐目标检测结果
为检验Hough圆变换算法是否可有效提取篮筐曲线,对任意采集图像进行篮筐目标检测,结果如图4所示.由图可知,Hough圆变换可准确标出篮筐的位置和大小,篮筐的半径r=218 px,圆心位置为(232,234).

图4 篮筐目标检测结果
3.3.3 篮球进球识别结果
对采集的左、中、右各10组投篮数据进行测试,得到表(1)~(3)的结果.由表可知,左投篮和右投篮中的准确率为100%,没有出现漏检或误检的情况;中投篮中第3组和第9组漏检/误检了一个进球,分析其原因可知,主要是通过篮球进入篮筐后延时的合适时间判断篮球与参数的匹配,以避免篮球进球误检,但中投篮可能存在空心球(篮球直接投入篮筐,没有延时),因此导致了漏检/误检.但总体来看,30组数据的检测准确率为93.33%,漏检率为6.67%,说明本研究基于图像分析的篮球进球识别方法有效,满足实际篮球进球识别需求,具有一定的实用价值.

表1 左投篮测试结果

表2 中投篮测试结果
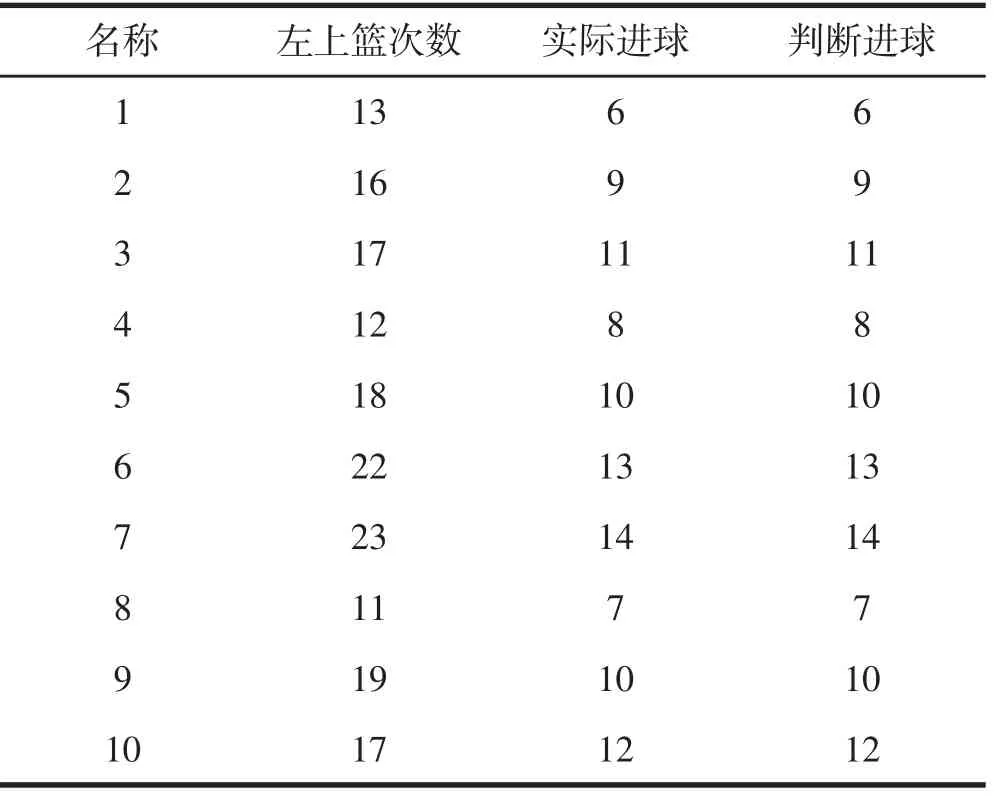
表3 右投篮测试结果
4 结语
综上可知,本研究提出的篮球进球识别算法可通过背景差分法和三帧差分结合算法实现对运动的目标检测,并通过Hought圆变换实现对篮筐的检测.同时通过仿真实验可知,提出方法的识别准确率达到93.33%,漏检率为6.67%,可满足实际篮球进球识别的应用需求,在青少年篮球训练以及运动队基础训练方面具有一定的实际应用价值.但由于能力局限,本研究还存在一些问题,如提出的篮球进球识别算法不能进行多目标检测,离实际应用还具有一定的距离.针对上述问题,研究将在今后的工作中逐步完善,以提高篮球进球识别算法的实用性,为篮球教学和训练上提供方便.
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
石油物探(2022年1期)2022-01-28
中国学校体育(2021年8期)2021-08-29
空间科学学报(2020年6期)2020-07-21
文萃报·周五版(2020年49期)2020-01-07
小学时代(2019年1期)2019-01-11
智富时代(2018年12期)2018-01-12
智富时代(2018年12期)2018-01-12
小天使·二年级语数英综合(2017年10期)2017-10-31
小天使·六年级语数英综合(2017年10期)2017-10-20