
集成式电静压伺服机构直流侧电压振荡抑制
2021-12-16 06:15史正强王水铭姜帅琦
液压与气动 2021年12期
史正强,李 瑶,王水铭,姜帅琦
(北京精密机电控制设备研究所,北京 100076)
引言
目前电液伺服机构按组成形式可分为阀控电液伺服机构和电静压伺服机构。电静压伺服机构具有集成度高、效率高、可靠性高、功率重量比大等优点。与阀控电液伺服机构相比,电静压伺服机构由于取消了易发生污染堵塞故障的伺服阀,其本质可靠性显著提高。同时,由于消除了大体积油箱和连接导管,密封性能和使用维护性显著提高[1-6]。
伺服电机泵是电静压伺服机构的动力来源,和机构是集成一体的。驱动控制器对直流电进行调制,以驱动伺服电机泵旋转进而驱动机构运动。通常设计中,驱动控制器与伺服机构是分立的,若驱动控制器与伺服机构进行集成化设计会带来比较大的优势。功率电子器件与电机就近连接,一方面强电功率电路统一封装在伺服机构壳体内,大大减小强电电磁辐射干扰;另一方面避免了三相交流电缆对伺服机构阻抗特性影响,可简化设计抑制强电电磁传导干扰所需的阻抗匹配、滤波电路,以减小系统体积重量。取消驱动控制器与电机之间笨重的三相强电连接,一方面,显著减小三相电缆及连接器带来的重量增加;另一方面,减少强电连接触点数量、简化系统操作及维护;且利用伺服机构主体结构为功率电子器件散热,有利于实现驱动控制电路的小型化设计和系统整体减重。
随着功率半导体技术的进步,促进了驱动控制器与伺服电机的集成一体化设计,SiC,GaN等宽禁带半导体技术已趋向成熟,趋势更加显著[7]。
驱动控制器与电静压伺服机构集成化设计时一个需要解决的问题是支撑电容的体积。伺服电机泵的加减速瞬间需要由支撑电容提供或吸收瞬时能量。在集成化设计中,需要考虑小容量支撑电容或无支撑电容情况下抑制母线电压的不稳定振荡[8-12]。
1 系统组成
1.1 系统原理
控制驱动器将直流电精确调制为三相交流电,从而驱动伺服电机泵旋转。伺服泵的高压油驱动液压缸进行力的输出。不同于阀控液压系统,电静压伺服机构属于闭式液压系统,在系统工作过程中需要保持低压压力防止液压泵的吸空现象,原理如图1所示。
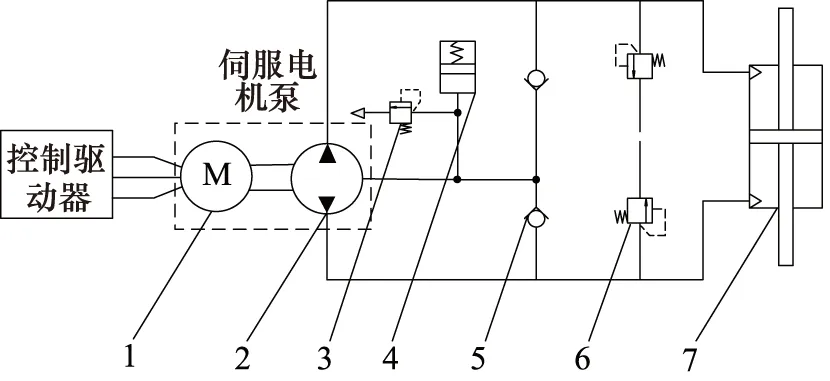
1.伺服电机 2.双向液压泵 3.低压溢流阀4.增压油箱 5.单向阀 6.高压溢流阀 7.液压作动器图1 电静压伺服机构原理图Fig.1 Schematic of electro hydrostatic servomechanism
图中的增压油箱4可以采用弹簧增压也可以采用波纹管增压。波纹管增压油箱中充有惰性气体来维持低压压力。由于用金属进行气液隔离,没有对外密封,故可靠性较高。
1.2 一体化结构
电静压伺服机构采用一体化集成式设计。壳体是主结构承力件,壳体上集成了压力传感器、溢流阀、单向阀及低压压力油箱,电静压伺服机构三维结构图如图2所示。控制驱动器集成在电机外侧,在长时间工作时,通过风扇对伺服电机和驱动控制的功率器件进行散热。
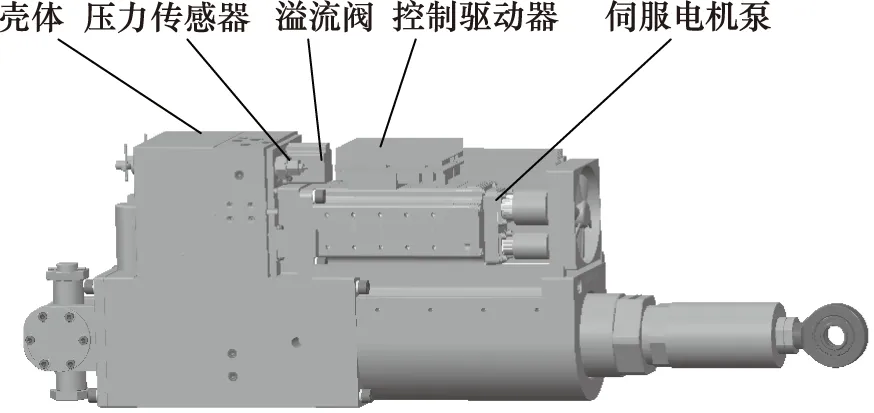
图2 电静压伺服机构三维结构Fig.2 3D structure of electro hydrostatic servomechanism
伺服电机泵是电静压伺服机构的核心部件,伺服电机和液压泵串联布局并进行同轴化设计,共轴设计减小了结构非线性对电机泵性能的影响,伺服电机泵三维结构图如图3所示。泵和电机共用同一个壳体,伺服电机是浸油工作的,工作时产生的热量可通过油液均布到机构的其他结构外表面,提高了整体散热性能。
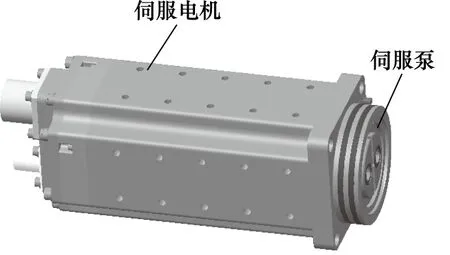
图3 伺服电机泵三维结构图Fig.3 3D structure of servo motor pump
2 系统模型
电静压伺服机构主要完成位移的输出与控制。对系统内各主要部件,伺服电机、双向液压泵、驱动控制器、作动器进行建模,并结合负载模型得到整体系统模型,图4为电静压伺服机构的简化控制原理图。

图4 电静压伺服机构简化控制原理Fig.4 Control schematic of electro hydrostatic servomechanism
位移偏差:
e=xc-x
(1)
式中,xc—— 参考位移
x—— 实际位移
液压作动器力平衡方程为:
(2)
式中,Δp—— 作动器两腔的压差
A—— 作动器有效面积
J—— 负载惯量
B—— 阻尼系数
KL—— 作动器与负载间的等效弹簧刚度
将伺服电机等效为直流电机,则:
KT×Iq=T
(3)
式中,T—— 电机输出转矩
Iq—— 电机电流
KT—— 电机的转矩常数
伺服电机与泵轴相连,力矩平衡方程为:
T=Δp×q
(4)
电机的响应方程可描述为:
(5)
式中,Kc—— 电机响应比例系数
τ—— 时间常数
联立以上各式有:
(6)
设电机泵时间常数τ为0,可得到伺服作动器的前向通道传递函数:
(7)
(8)
表示为标准形式:
(9)
系统的固有频率为:
(10)
阻尼比:
(11)
3 集成化的稳定性
电静压伺服机构核心部件是伺服电机泵,驱动控制器需要将直流电转换为精确调制的三相交流电,从而实现对伺服电机的控制。
系统设计时即需要考虑电机的调速性能,又需要关注直流侧的电压稳定性问题。传统的设计方法是加大直流侧支撑电容Cd的容量。大容量支撑电容有利于系统的稳定性但不利于进行系统的集成设计,小容量的支撑电容易于进行系统集成但难以使系统达到稳定。
图5中发电机的三相交流电经过二极管整流后为电静压伺服机构供电。Ls为发电机相电感,Rs为相电阻,Ld为母线电感,Cd为支撑电容,系统的电源部分的等效模型如图6所示。模型中Vs是直流电源电压,R为等效内阻,L为等效电抗,Rl为负载阻抗,Vdc为直流母线电压,Il为负载电流。
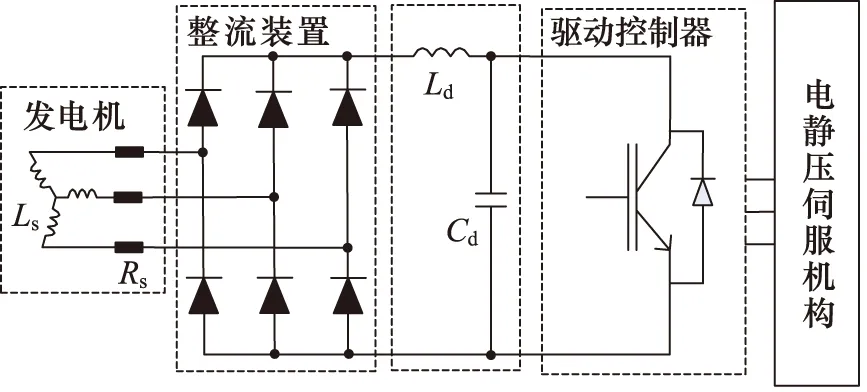
图5 发电机供电的电静压伺服机构原理图Fig.5 Schematic of electro hydrostatic servomechanism powered by generater
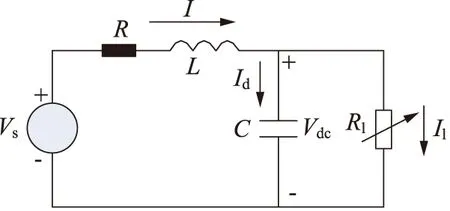
图6 系统等效模型Fig.6 System equivalent model
则可以得到等效方程:
(12)
式中,Vs—— 电源电压
Vdc—— 母线电压
Il=Pl/Vdc
(13)
设Vdc0为直流电压,ΔVdc为此时直流电压的变化量,即:
Vdc=Vdc0+ΔVdc
(14)
此时负载电流为:
(15)
从上式中看到ΔIl为:
(16)
式(14)可以表示为:
(17)
有系统方程:
(18)
特征方程为:
(19)
系统稳定条件为:
(20)
(21)
对于500 V供电的驱动控制器,输出功率7 kW,电源内阻50 mΩ,等效电感1 mH时,为满足稳定性条件,支撑电容容值应大于560 μF。显然在集成化结构设计时,保证系统稳定性和结构小型化之间存在矛盾。
4 直流侧电压主动缓冲
电静压伺服机构工作过程中,出现大的加减速工况时,驱动控制器电流的突然变化易造成直流侧母线电压的振荡。直流侧电压振荡可采用被动方式或者主动方式进行缓冲,被动方式需要增加直流母线电感、增大支撑电容的容量,给小体积的集成化带来困难;主动缓冲方式对驱动控制器的电流进行缓冲进而达到减小直流侧电压振荡的目的。
图7是电静压作动器驱动控制器和电机的等效模型,等效模型中包含缓冲电流Idamp。直流母线电压的波动主要受负载电流Il影响,主动缓冲的思想就是通过调节缓冲电流Idamp的值来减小Vdc的波动。
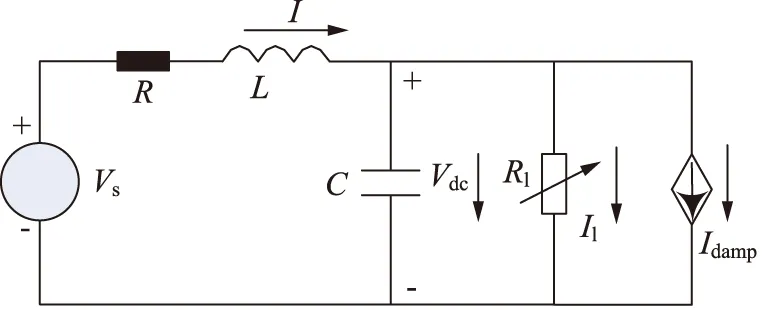
图7 带缓冲电流等效模型Fig.7 System equivalent model with damp current
支撑电容电流可表示为:
(22)

(23)
式中,kp—— 稳定控制增益。

(24)
式中,τh—— 高通滤波的时间常数
τl—— 低通滤波的时间常数
联立式(12)、式(23)、式(24),则系统的特征方程为:
(25)
系统稳定条件为:
(26)
系统的渐进稳定性可由式(27)确定:
(27)
从式(27)可以看出,系统的稳定与增益kp相关,kp的增大可以使系统更加稳定。
电静压伺服机构采用永磁同步伺服电机,驱动控制器采用Id=0控制,伺服电机的加减速与Iq相关。缓冲电流Idamp通过改变Iq来实现直流侧电压的主动缓冲,即:
(28)
5 仿真验证
为验证主动缓冲的有效性,对系统进行仿真实验。仿真中电静压伺服机构功率10 kW,惯性负载质量80 kg,母线电压500 V,直流侧等效电感1 mH,电源内阻50 mΩ,支撑电容容值为20 μF,增益kq设置为0.4。直流侧电压振荡是在伺服电机加减速时产生,在仿真实验中让伺服机构进行方波位移运动,图8为带电流缓冲和不带电流缓冲时位移曲线的对比;图9为两种情况下直流侧电压波动对比。
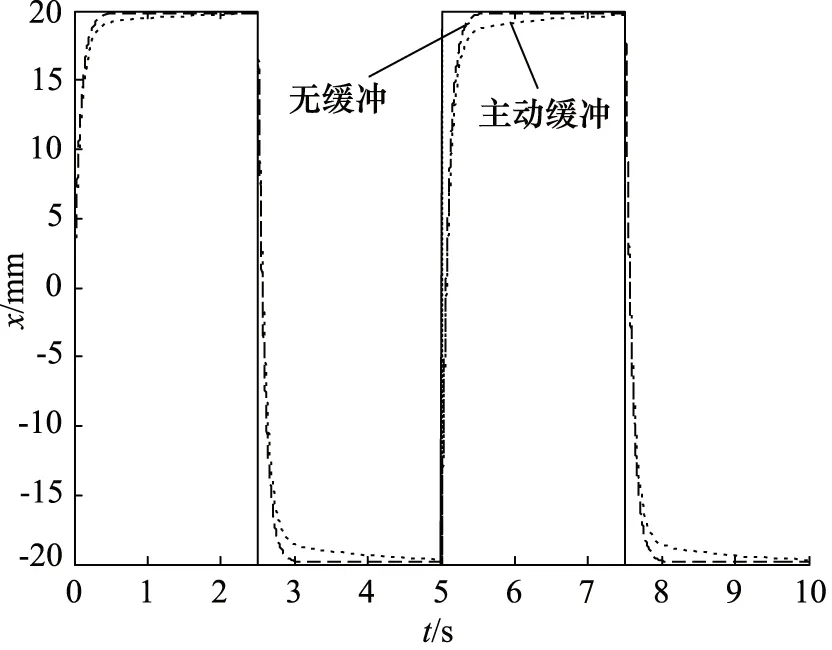
图8 带主动缓冲和不带缓冲时伺服机构位移曲线Fig.8 Displacement comparison of servo mechanism with damp current and without damp current
从图9中可以明显看出,带电流缓冲时直流侧电压波动较小,在10 V之内,而不带电流缓冲时直流侧电压波动大,波动会超过40 V。电流缓冲实际上是在直流侧电压波动时降低q轴电流输出,即降低了伺服机构的响应速度。图8显示当采用电流缓冲方法时伺服机构位移响应速度相对变慢,在接近设定值时速度会降低,位移缓慢靠近目标值。
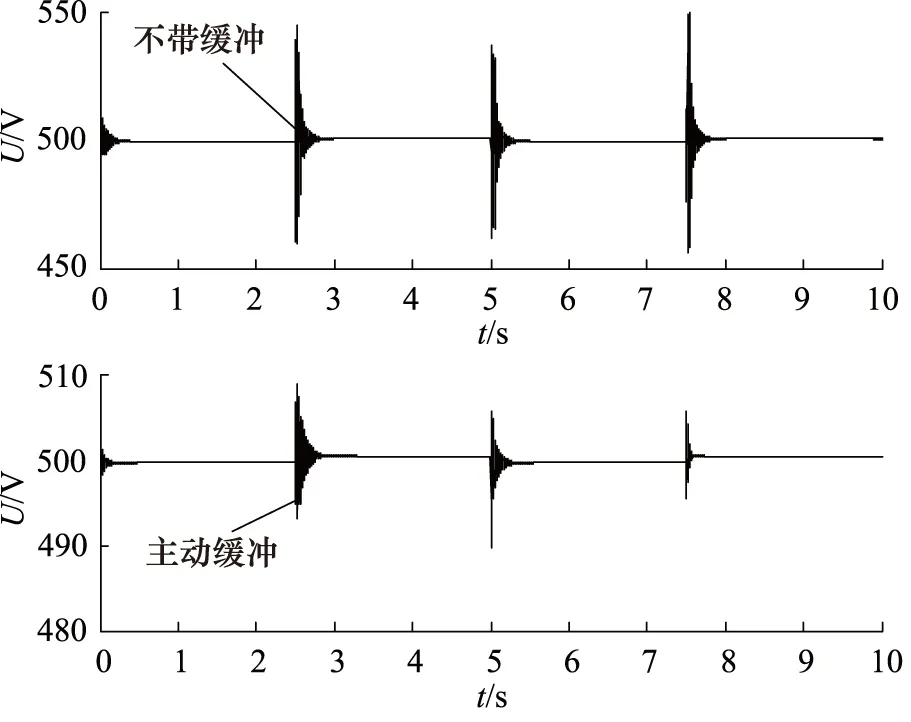
图9 带主动缓冲和不带缓冲时直流侧电压波动Fig.9 DC side voltage fluctuation of servo mechanism with damp current and without damp current
6 结论
电静压伺服机构的核心部件伺服电机泵由驱动控制器进行驱动,将驱动控制器和伺服机构进行结构一体化集成,从电磁辐射、电缆长度、电触点数量等方面都有优势。结构集成时,需要降低直流侧支撑电容的容量以减小驱动控制器的体积。由于采用小容量支撑电容,在伺服机构作动时直流侧电压易出现振荡不稳定现象。为提高直流侧电压稳定性,采用主动缓冲的方式减小电压的振荡幅度。理论分析和仿真试验验证了此种集成化设计方法的可行性。
猜你喜欢
建材发展导向(2021年15期)2021-11-05
微特电机(2020年11期)2020-12-30
岩土工程技术(2019年6期)2020-01-06
装备制造技术(2019年12期)2019-12-25
飞控与探测(2019年4期)2019-09-09
制造技术与机床(2018年8期)2018-10-09
电子制作(2018年17期)2018-09-28
制造技术与机床(2018年9期)2018-09-19
通信电源技术(2018年3期)2018-06-26
工业设计(2016年6期)2016-04-17
