
垃圾分类整理装置的设计*
2022-01-06 06:35何剑敏沈孟锋陈文军毛鹏涛蔡益建
机械制造 2021年12期
□ 何剑敏 □ 沈孟锋 □ 陈文军 □ 毛鹏涛 □ 蔡益建
杭州科技职业技术学院 机电工程学院 杭州 311402
1 设计背景
为加强生活垃圾分类管理,改善城乡人居环境,上海、杭州、山东、广州等地作为垃圾分类的排头兵,相继出台生活垃圾管理条例[1]。伴随着垃圾分类的推进,出现了互联网+、全链条等垃圾分类新模式,以减少垃圾焚烧、填埋所造成的污染[2]。
为解决垃圾分类问题,部分研究者基于朴素贝叶斯分类器对垃圾分类管理进行研究[4],还有学者重点关注垃圾投放前端的自动识别技术应用[5]。在互联网及传感技术方面,胡文帅等[6]重点研究基于物联网的智能垃圾桶,马新玲等[7]采用高清摄像头、红外热成像仪、物相分析仪等设备进行垃圾分类。在图像处理技术方面,吴蓬勃等[8]设计了一款基于TensorFlow软件的垃圾视觉分拣机器人试验平台,李美锟等[9]使用图形处理器加速训练,结合树莓派实现垃圾分类,刘文斌等[10]应用图像识别系统完成智能垃圾分类箱的设计。在语音识别技术方面,文献[11-12]均利用STM32单片机和语音识别模块进行识别。对于垃圾投放后端的垃圾处理,何庆浩等[13]基于电气可编程序控制器技术设计多用途可回收垃圾自动分类装置。对于厨余垃圾的处理,原一高等[14]利用微波加热技术设计了一种餐厨垃圾微波干燥装置。在后端进行垃圾分类和处理,成本明显较高。
笔者为满足垃圾前端分类处理需求,对不同垃圾进行有效回收和处理,减轻垃圾后端处理压力,设计了一款垃圾分类整理装置。
2 主要功能
垃圾分类整理装置由铝型材和亚克力板搭建,分为上下两层,整体设计如图1所示。
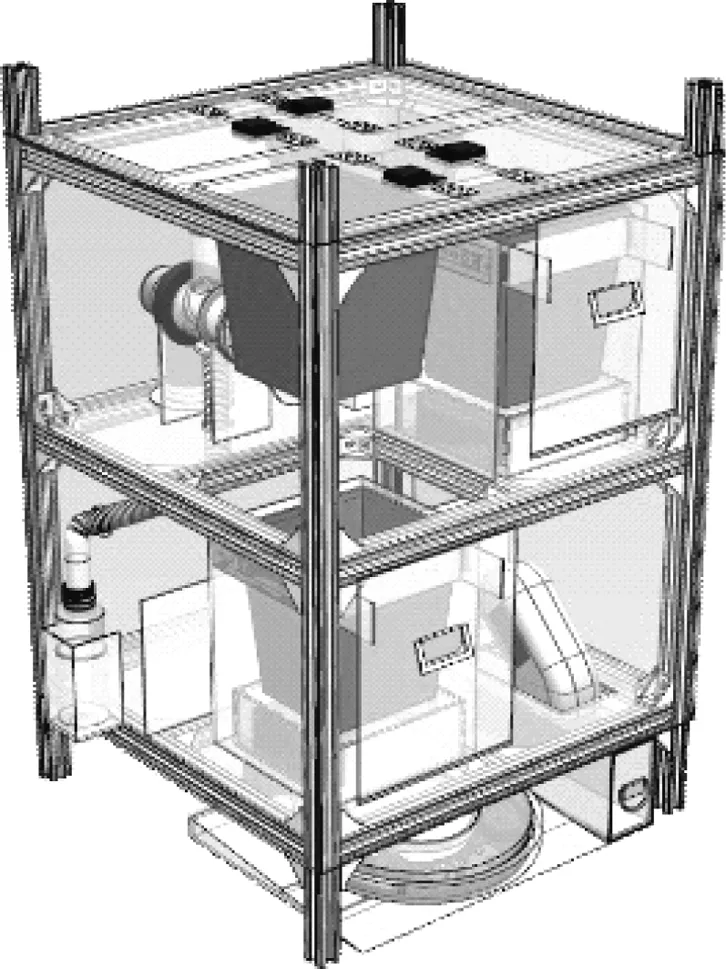
▲图1 垃圾分类整理装置整体设计
垃圾分类整理装置上层以垃圾分类为主,下层以垃圾收集整理为主,特色功能主要为语音开盖和智能集尘。垃圾分类整理装置通过STM32单片机控制,通过语音识别和舵机实现自动开盖功能,通过内置吸尘机和集尘桶实现垃圾智能收集。
3 设计方案
3.1 语音识别模块
为解决投放人难以区分四大类垃圾的困扰,笔者使用语音识别模块,投放人只需要正确说出投放的垃圾名称,垃圾分类整理装置便可以自动识别并打开相应垃圾投放桶的盖板。语音识别模块由LD3320语音识别芯片、SYN6288语音合成模块、SG90舵机组成,通过麦克风接收语音信号,经过音频处理,对语音信号进行解码和数字化处理。语音识别流程如图2所示。
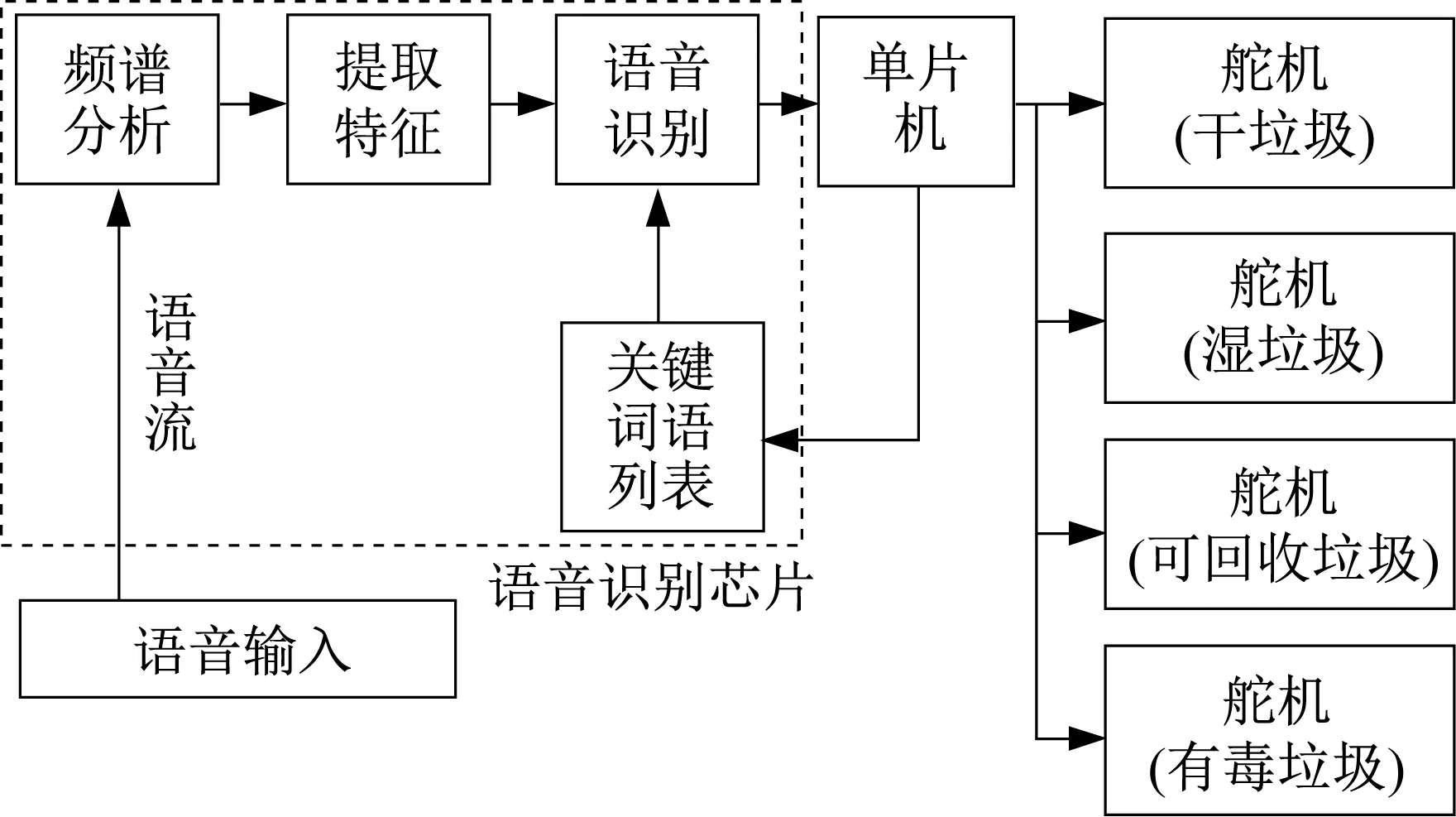
▲图2 语音识别流程
由图2可知,语音信号分析处理时,与关键词语列表进行对比,得到垃圾分类的匹配结果,继而控制相应的舵机转动90°,实现垃圾桶的开启和关闭。
3.2 智能集成桶模块
智能集成桶模块主要由扫地机器人、吸尘机、集尘桶三部分组成。日常所用的扫地机器人清洁后,需要寻找充电位置进行充电,机器人中的清扫物不能及时清理,一般均由人工进行处理。在垃圾分类整理装置中,对充电位置进行调整,增加15°斜面,同时在斜面底部加开吸尘槽。智能集成桶模块结构如图3所示。

▲图3 智能集成桶模块结构
当扫地机器人每次归位进行充电时,触发安装在集尘桶上部圆形开口处的吸尘机工作。通过吸尘机产生的负压,将尘盒内垃圾吸至集尘桶中,实现清洁与处理一体化。这一功能能够避免用户清理尘盒时造成二次污染。
机器人吸尘过程属于气固两相流动,忽略清除垃圾对象的多样性,分析简化为单一介质的气场流动问题,气流场选用标准k-ε湍流模型。
标准k-ε湍流模型主要求解湍流动能k方程和湍流耗散率ε方程。k方程是精确方程,ε方程是根据经验公式推导的方程。假定流场是完全发展的湍流,不考虑分子之间的黏性作用,方程为[15]:
+Gk+Gb-ρε-YM
(1)
(2)
μt=ρCμk2/ε
(3)
式中:ρ为密度;ui为流速分量;t为时间;xi、xj为流向分量;μ黏性因数;Gk为平均速度梯度引起的湍动能;Gb为浮力引起的湍动能;YM为可压湍流中扩张产生的波动;μt为湍流黏性因数;C1ε、C2ε、C3ε为经验常数;σk、σε为湍动能k和耗散率ε对应的湍流普朗特数,σk=1.0,σε=1.3。
在集尘桶设计前期,需要对桶内空气流动进行分析。利用Fluent仿真软件进行流场分析,先在设计模块中创建集尘桶三维模型。为节约不必要的计算资源,对集尘桶模型进行简化处理,重点分析截面的流场。对集尘桶模型进行有限元网格划分,共获得4 802个单元和6 424个节点,同时设定进气口、出气口和壁面三个界面。将有限元模型中流体的属性设定为空气,密度设定为1.225 kg/m3,添加输入接口边界条件为0 Pa,输出接口边界条件为-6 kPa。采用半隐式连接压力方程算法对有限元模型进行计算,得到流场颗粒轨迹,如图4所示。

▲图4 流场颗粒轨迹
根据流场颗粒轨迹可知,通过吸尘机所产生的负压,可以将进入的空气吸入集尘桶,通过底部间隙直达集尘桶右侧的集尘袋。由于受到壁面的限制,在底部间隙入口处及右侧集尘袋上产生涡流,使空气在集尘袋中连续运动,初步达到垃圾进袋的效果,但同时导致流体速度变慢的情况。
4 试验验证
经过设计方案相关计算仿真后,搭建垃圾分类整理装置实物。垃圾分类整理装置长60 cm,宽60 cm,高88 cm,实物如图5所示。

▲图5 垃圾分类整理装置实物
通过试验,验证以下功能:
(1)设置多种垃圾类型,通过语音智能识别系统,实现四大类垃圾识别,正确开盖和关闭功能;
(2)扫地机器人成功进入15°斜面充电平台,实现充电功能,同时启动吸尘机,将扫地机器人底部的垃圾吸入集尘装置。
5 优点
垃圾分类整理装置有两大优点。
(1)通过语音识别智能分类垃圾,帮助对生活垃圾分类不明确的投放人正确投放垃圾,有利于生态环保和垃圾可回收利用。
(2)配合扫地机器人自动集尘密封处理,在扫地机器人充电时,自动清理扫地机器人收集的垃圾,避免二次投放和扬尘,实现收集、清理一体化。
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
印制电路信息(2022年11期)2022-11-30
中国计算机报(2019年8期)2019-03-27
汽车维护与修理(2018年9期)2018-10-31
课程教育研究·学法教法研究(2018年6期)2018-07-30
凿岩机械气动工具(2017年1期)2017-05-17
童话世界(2017年8期)2017-05-04
学周刊(2017年11期)2017-03-31
科技与创新(2016年15期)2016-09-23
数学大王·低年级(2016年7期)2016-05-14
