履带装备行动部分智能调整装置设计与实现
2022-01-11 04:30邢炜焱
兵器装备工程学报 2021年12期
李 兵,唐 昊,邢炜焱,李 磊
(中国人民解放军32142部队, 河北 保定 071000)
1 引言
修理分队对履带装备行动部分的调整主要包括平衡肘高度调整和负重轮的中心线校正两个内容。在平衡肘高度调整方面,传统方法是针对不同型号装备采用不同规格的专用工具进行,其弊端有:一是通用性差,各型装备专用工具各不相同,平时不便于管理,演训不便于携带;二是精准度不高,机械式操作不精准、水平垂直关系难把握、肉眼判断有误差;三是调整方法不一,各型装备基准点(线)不同、测量位置不同、误差控制方法不同,导致调整方法繁杂;四是对作业人员要求高,需熟记各型装备调整方法及技术参数,往往需反复查阅资料,维修效率低。在负重轮中心线校正方面,传统方法是铅垂线法和测距法,其弊端有:一是铅垂线法受地形条件影响大,负重轮、主动轮、诱导轮的径向中心线标定过程复杂,主观判断不准确,误差较大;二是测距法测量基准确定不精确,受零部件磨损程度影响大[1]。为规避这些问题,可研发一款履带装备行动部分智能调整装置,通过理论计算统一测量基点,利用激光直线标定、测距精准优势,融合具备智能调控的执行机构,提高调整的自动化程度,实现可针对不同型号装备平衡肘高度调整和中心线校正的一机多用,从而达到提升人机功效、节约人力资源、提高维修效率的预期目标[2]。
2 结构功能需求分析
1) 基座设计应方便灵活、适应性强
从车间及演训维修保障的实际需求出发,实现履带装备行动部分的精准调整,装置基座应与待调整装备平正关系对应,且装置要满足通用性强、尺寸合理、行动方便、调节自如、收纳便捷、自动调平、承载稳固的基本要求[3]。
2) 测距系统应精准高效、正确率高
从满足操作简单、测值精确的实际需求出发,该部分一方面可利用激光直线特性实现负重轮中心线定位,另一方面可利用激光测距精准特性,实现测距数值的采集与传输。
3) 控制执行应有效对应、误差率低
从显示控制层面满足界面展示简单明了、信号处理科学及时、指令下达清晰准确和执行层面机构平稳精细、误差率低的实际需求出发,控制层命令拟制要科学高效,执行层执行命令应平稳可靠,同时,解决2个层面的对应关系是装置的核心环节[4]。
3 结构功能实现
为具体实现履带装备行动部分智能调整装置功能,将整体结构设计如图1所示。
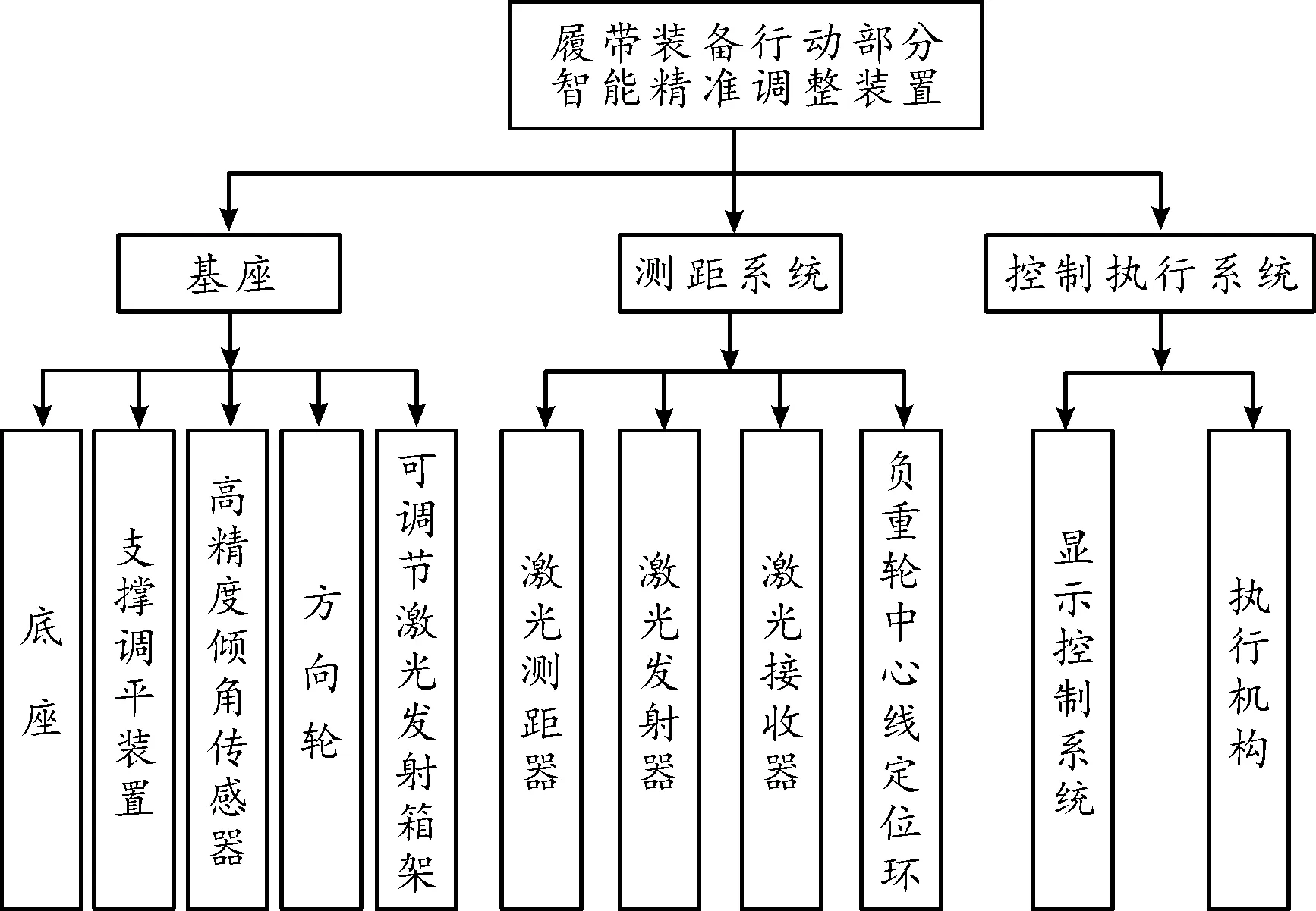
图1 履带装备行动部分智能调整装置设计结构框图Fig.1 The design structure of the intelligent adjustment device for the action part of the crawler equipment
3.1 装置实体结构
将自调节基座、基于激光测距系统的数据测算模块、显示控制系统和执行机构进行有机融合,合理布局[5]。装置实体结构如图2所示。

图2 装置实体结构示意图Fig.2 Device physical structure
3.2 自调节基座
该基座由底座、可折叠激光发射箱架、支撑调平装置组合而成。自调节基座实体结构如图3所示。
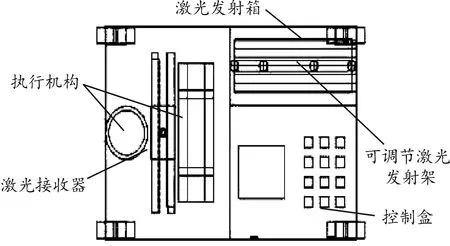
图3 自调节底座实体结构示意图Fig.3 The physical structure of the self-adjusting base
其中,底座整体采用不锈钢材质,由核心显示控制区、组件定位储藏区、行动装置组成。作为整个装置的基座,为可调节激光发射箱架,电动直流油缸、控制盒、连接线仓等提供安装位置,为可调节激光发射箱架、激光发射箱、执行机构、坡度感应仪、激光接收器等提供储藏空间[6]。各功能区间设置隔断,其中显示控制模块采用密封防水设计。
可折叠激光发射箱架,主要用于连接底座和激光发射箱。采用带锁紧装置的可伸缩结构设计,便于根据不同车型调节激光发射箱的位置,具有体积小、质量轻、抗变形能力强等特点。支撑调平装置主要包括控制箱、电动支腿4个、倾角传感器2个。主要用于实现基座与车体相对平正,2个高精度倾角传感器分别置于车体平面及基座平面,工作时根据倾角传感器的数据值,通过控制箱“一键调平”键,系统可自动完成空行程、触地、直至调平。同时,还具备一键回收、微调平、单腿动作、紧急停止等功能,操作简便。
3.3 基于激光测距系统的数据测量模块
由激光发射箱、4个激光接收器、1个负重轮中心线定位环及附件组合而成[7]。激光测距箱实体结构如图4所示。

图4 激光测距箱实体结构示意图Fig.4 The physical structure of the laser ranging box
3.3.1激光发射箱和激光接收器
主要由箱体、行动机构、1个激光测距器、2个激光发射器组成。激光发射箱采用全铝板材,通过支架固连于底座上,展开时发射箱与底座处于平正关系,通过线缆插口与显示控制盒连接,实现电源、数据传输[8]。
2个等比伸缩接收器(1号、2号)、1个内嵌式平衡肘轴孔接收器(3号)、1个外套式负重轮轴接收器(4号)、1个负重轮中心线定位环(5号),用于接收激光发射器发出的激光信号,在调整平衡肘和校正负重轮中心线时根据实际情况分别使用。
1号接收器安装在主动轮上,用来精准定位主动轮齿圈间的中心位置,2号接收器安装在诱导轮上,用来精准定位诱导轮间的中心位置,如图5所示;3号接收器依托平衡肘轴孔安装定位,用来精准定位平衡肘轴孔的中心位置,如图6所示。
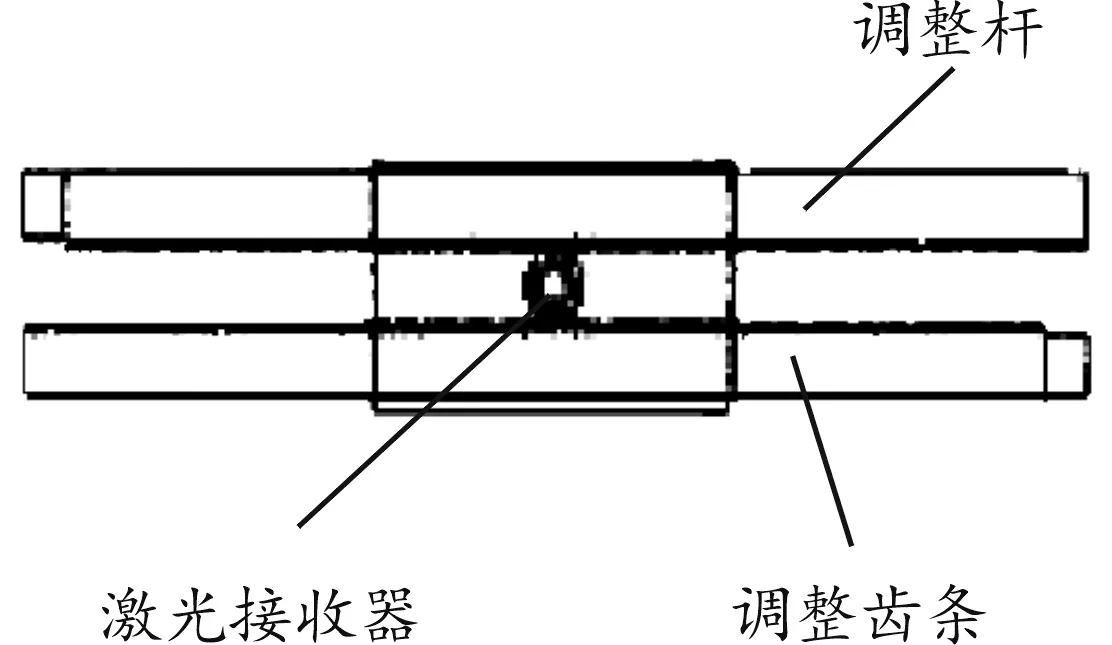
图5 等比伸缩接收器(1号、2号)安装位置示意图Fig.5 Installation position of the equal-ratio telescopic receiver (No.1,No.2)
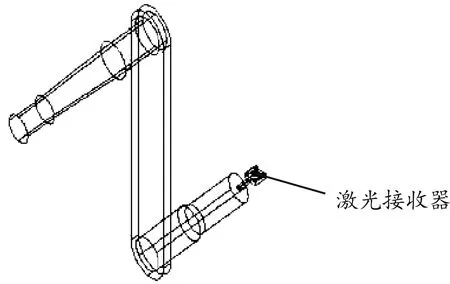
图6 内嵌式平衡肘轴孔接收器(3号)安装位置示意图Fig.6 Installation position of the built-in balance toggle shaft hole receiver (No.3)
4号接收器外套于负重轮轴轴承台肩,用来精准定位负重轮轴轴承台肩上切面的顶点位置,5号安装位置与4号相同,起辅助作用,如图7所示。整车激光接收器安装效果如图8所示。
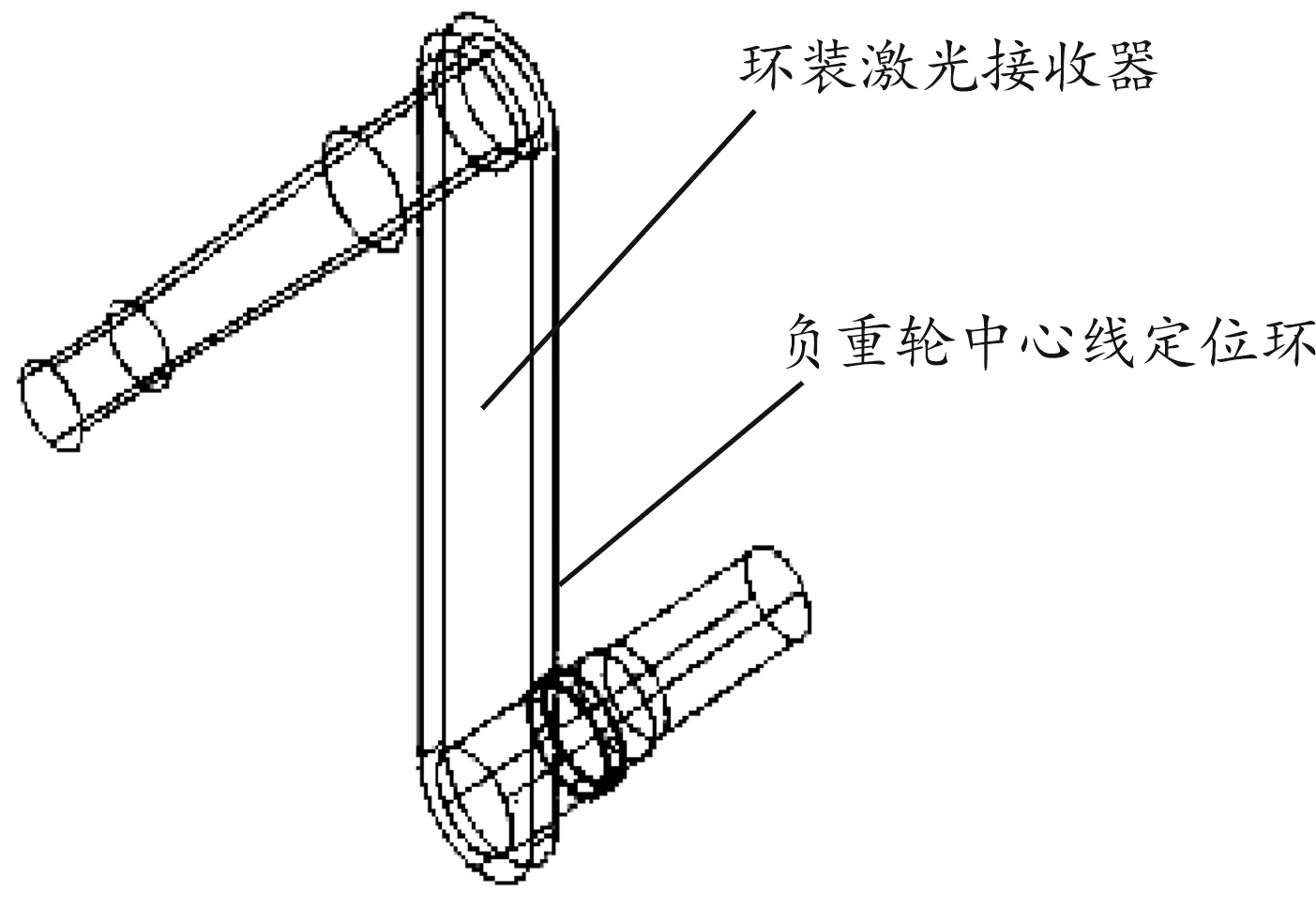
图7 外套式负重轮轴接收器(4号)与负重轮 中心线定位环(5号)安装位置示意图Fig.7 The installation position of the jacket type road wheel axle receiver (No.4) and the road wheel centerline positioning ring (No.5)

图8 激光接收器安装效果图Fig.8 The installation effect picture of the laser receiver
3.3.2激光发射箱与激光接收器工作关系
第1步:利用2个激光发射器和1、2号激光接收器实现主动轮与诱导轮同心标定;第2步:利用激光测距器“原位”按钮,实现激光测距器位于激光发射器的铅垂面上,通过显示控制面板按键,电动调整激光测距器X轴向移动,将激光点与4号接收器环形传感器(环形刻线)顶部切线某点重合,通过调整平衡肘轴向位移,将激光点与各车型对应标识传感器(刻度线)重合,实现负重轮中心线精确定位;第3步:启动自动激光测距程序,测量激光测距器到4号接收器环形传感器(环形刻线)的距离(定义为L1),并传输至中央处理器;第4步:通过显示控制面板按键,电动调整激光测距器位置,将激光点与3号接收器重合,测量激光测距器到3号接收器距离(定义为L2),并传输至中央处理器;第5步:中央处理器对数据处理后,形成控制指令控制电动缸工作,对平衡肘角度进行调整;第6步:重复第4步,对调整结果进行校验,如在误差范围内,调整结束,如超过误差,按第5步微调后安装。
3.4 显示控制系统
由显示屏及功能按键、中央处理器和执行机构组合而成。设有24 V直流、220 V交流电源接口。野外维修作业时使用24 V电源接口;车间生产时使用220 V电源接口,通过电源适配器转化为24 V直流电源。
显示屏作为软件输出载体,承担界面、命令、数据显示功能。功能按键主要提供开关机、菜单、车型选择、调整位置选择、返回、复位等功能。
由电源模块、信号处理器、主机控制单元、内置电池、报警器组成。电源模块将外部供入主机的24 V直流电压变为主机工作时所需电压(一般5 V或3.7 V),并具备稳压功能。
信号处理器主要用来接收测距器数据,处理后传输给主机控制单元,主机控制单元计算出平衡肘轴孔和负重轮轴上端面切点垂直方向上的高度差,并向执行机构发出程控调整指令。
3.5 执行机构
该部分主要包含:伺服电机、电动缸、带锁止装置的双向自调节滑道、负重轮轴支座[9]。其中:伺服电机根据中央处理器调整指令带动电动缸工作,使电动缸伸缩到恰当高度;带锁止装置的双向自调节滑道与负重轮轴支座连接在一起,起到平稳推动负重轮轴摆动的作用。执行机构结构图如图9所示。
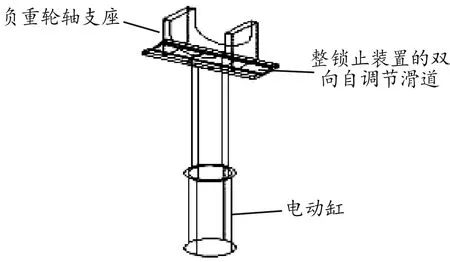
图9 执行机构结构示意图Fig.9 Schematic diagram of the actuator
4 功能测试
4.1 整机工作流程
1) 接上电源,打开控制面板上的电源开关整机通电。
2) 打开激光测距器开关(短按1次左侧激光测距器工作,连按2次右侧激光测距器工作,连按3次两个激光测距器同时工作;激光发射器控制方法同上)。
3) 待主机准备就绪之后,按下控制面板的“菜单”键显示屏弹出车型画面。
4) 按方向键“上、下、作、右”选择车型,选择完车型之后按“OK”键确认。
5) 按方向“↑”“↓”“←”“→”键选择对应的车型的平衡肘,按“OK”键确认。显示屏显示出当前平衡肘的理论数值和实际数值;若实际数值在理论数值的误差范围之内,主控不会报警;若超出误差范围主控会报警,此时提醒你要重新调整。
6) 调整平衡肘的方法:① 若“手/自”开关在自动位置,在第5步操作完之后主控单元会自动控制高度油缸电机的正反转带动负重轮轴上升或下降,直至距离符合要求电机停转;② 若“手/自”开关在手动位置,第5步操作完之后按方向键上键“↑”或下键“↓”油缸电机正转或反转带动负重轮轴上升或下降,直至距离符合要求松开按键。
7) 负重轮中心线的调整方法:① 将3、4、5号接收器分别装在主动轮、诱导轮和负重轮上;② 打开水平激光器的开关;③ 使得激光器的激光分别打在3、4号接收器上;④ 打开一个垂直激光发射器,调整负重轮使得其上的5号接收器可以接收到垂直激光发射器的激光。整机工作流程如图10所示。

图10 整机工作流程框图Fig.10 Work flow chart of the whole machine
4.2 负重轮中心线调整功能测试
履带行动部分智能调整装置配置到位,配置高精度角度仪,各系统接通电源,并完成自检;电动调节电动缸,实现与平衡肘配合;激光发射箱及支架展开安装各激光接收器;支撑调整机构工作实现装置与车体保持平正;打开激光发射器开关,调整确定主动轮、诱导轮中心线;控制激光发射器运动,实现与3号激光接收器顶面切线某点重合;调整平衡肘,实现激光点与3号接收器对应车型定位线重合。
通过对照试验,由表1可以看出,基于激光测距系统的平衡肘调整法相对于传统的调整法,用时更短,更有效率。

表1 基于激光测距系统的平衡肘调整时间与传统调整方法时间表Table 1 ComparisonTable of balance elbow adjustment time based on laser ranging system and traditional adjustment method time
4.3 平衡肘高度调整功能测试
以07式122 mm自行榴弹炮为例:改进前07式122 mm自行榴弹炮平衡肘调整方法为:采用依次测量单个平衡肘自负重轮轴中心至平衡肘轴中心的距离[10]。此方法难以准确定位负重轮轴中心和平衡肘中心位置,实际维修作业过程中人为误差较大。改进后07式122 mm自行榴弹炮第1平衡肘基于激光测距系统的平衡肘调整方法下的高差标准值计算方法:
负重轮轴台肩的直径为φ1,负重轮轴中心到平衡肘轴孔中心的垂直距离为LAB。负重轮轴台肩上端面到平衡肘轴孔中心的垂直距离为LCD。如图11所示。
其上下浮动为7 mm。
按照此类方法,逐一对各车型各平衡肘调整标准值进行计算,形成基于激光测距系统的平衡肘调整方法高差标准值如表2所示,并写入软件程序[11]。按此方法进行维修作业,仅需选定车型、轴序,无需查看相关数据,即可自动完成调整作业。

图11 PLZ07式122 mm自行榴弹炮平衡肘 调整量计算原理示意图Fig.11 The calculation principle of the balance elbow adjustment of the PLZ07 122 mm self-propelled howitzer

表2 基于激光测距系统的平衡肘调整方法高差标准值
说明:按照基于激光测距系统的平衡肘调整方法,逐型号对各型履带装甲军械装备平衡肘高差标准值进行计算确定。将结果编入程序,便于维修过程中直接调用。
首次调整07式122 mm自行榴弹炮基础数据如图12所示,只需按照提示数据要求启动向下调整按钮,执行机构自动向下调整13 mm,即可满足技术要求。精确性水平、智能化程度和调整效率大幅度提升。
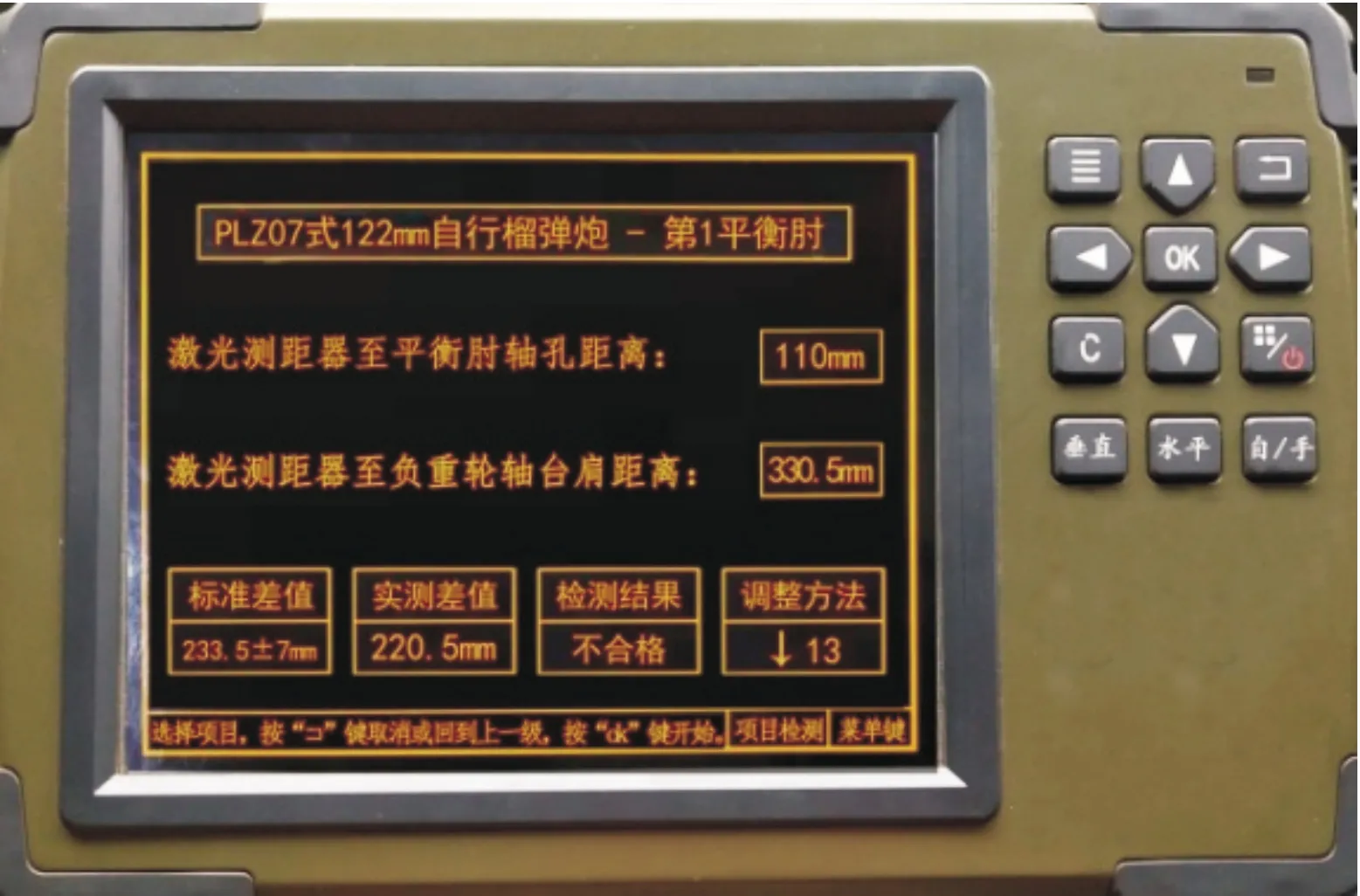
图12 履带装备行动部分智能精准调整装置工作界面Fig.12 The working interface of the intelligent precision adjustment device for the action part of the crawler equipment
5 结论
所设计的履带装备行动部份自动调整装置工作稳定、操作方便、测量精确、通用性强,可装备各级装备修理分队,用于部队训练、考核、演习及作战过程中装备保障人员遂行装备维修任务。
猜你喜欢
科技创新与应用(2022年32期)2022-11-15
动漫界·幼教365(小班)(2019年10期)2019-10-28
中学科技(2018年9期)2018-12-19
中小企业管理与科技·中旬刊(2017年10期)2017-11-06
科技创新导报(2016年20期)2016-12-14
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
现代电子技术(2014年16期)2014-08-20