
一种智能农机深松监测装置
2022-02-10 08:37韩冰冰燕亚民
南方农机 2022年2期
王 双 , 韩冰冰 , 燕亚民
(许昌职业技术学院机电与汽车工程学院,河南 许昌 461000)
农机深松是近年来农业农村部重点推广的农机化新技术。深松作业时通过有效地破坏犁底层,改善土壤耕作层结构,增强土壤蓄水保墒和抗旱防涝能力。农机深松对粮食增产有显著的促进作用,李克强总理等国务院领导多次指示,要求加快推广机械深松整地[1]。2015年中央农村工作会议提出“2015年全国要力争完成深松整地2亿亩”的工作任务。由此可见,市场推广前景很好。
1 农机深耕装置的研究现况
目前,在深松农机具上虽然配备有深松监测装置,但大多采用的是安装在机架上的红外深度监测装置,如图1所示,该红外深度监测装置监测的是机架到地面的尺寸,而深松深度是犁铲尖端到机架的尺寸减去红外监测尺寸[2]。这种方式理论上是无错的,但在实际应用中因犁铲相对于机架的位置是可调的,这样在机架相对于地面的尺寸(即红外监测尺寸)不变、犁铲相对于机架的位置被调小时,深松深度就会变小,这就使只追求效益的农机手有空子可钻,造成深松深度的不稳定性和农机手的投机取巧,导致深松深度不完全符合要求等问题。有些机手把犁铲尖端相对于机架的间距调得很小,同时还把三点悬挂调得很低,这样红外监测装置监测到的地面与机架的间距尺寸就比较小,表面上看好像深松深度很大,而实际刚好相反。不能监控机手所做的这些调节,就不能保证深松深度。

图1 深松深度示意图
2 研究设计思路
目前,国内外出现的深松监测装置都能对深松深度进行实时监测。深松监测装置安装在深松机机架上以后,由于监测的是机架到地面的距离,通过机架到犁铲的距离进行换算计算出深松深度,而犁铲在机架上的位置是可以调节的,机架相对于地面的位置也可以通过悬挂装置来调节,深松操作机手可任意调整犁铲相对于机架的位置,使犁铲相对于机架的尺寸变小,这样在犁铲入土深度小于深松尺寸时,机架相对地面的尺寸也符合要求了,监测装置认为深松深度达到规定要求。从而造成监测深度和实际深松深度不一致,不能有效保证监测数据与实际深松深度的一致性。因此,研制一种监测定位装置,使无论深松监测装置在深松机上安装后机手怎样调整,监测数据和实际深松深度都保证一致是当前亟需解决的问题。
为了解决这个问题,本研究在原监测装置的基础上增加一套近距离传感装置,即在机架的适当位置安装传感器,在犁铲臂上镶嵌永磁体[3]。在这里还要解决一个问题,即永磁体嵌入到犁铲臂中的隔磁问题,为此本研究通过大量的实验,最终选用成本低、易于机加工和装配的铝材作为隔磁材料。隔磁材料选好后,还有一个制造装配工艺的问题,于是研究者先利用creo parametric进行了零件的设计、模拟装配和工艺编制,然后按照图纸和工艺文件进行实物加工和装配,最终找到了合适的零件结构和加工装配工艺。
3 改进方法及关键部件的设计
3.1 针对定位限位不可调整的问题
为解决这个问题,本研究对现有监测装置深松深度监测方法进行分析,找出机手对机架位置和犁铲位置的改变(调节)的方法以及该调节影响深松深度监测值的原因。针对这些,为了实现不可调或者不可私下调节,研究者设想在原监测装置的基础上增加一套近距离传感装置,在机架的适当位置安装传感器,在犁铲臂上镶嵌永磁体,如图2所示。这样只有传感器和永磁体近距离对应,深松监测装置才会接收到信号,才会上传信息,才有深度监测结果。原理如下:1)永磁体通过隔磁材料嵌入并隐藏到犁铲中,是一个不可拆卸的隐性部件,所以机手对永磁体无法做手脚。如果机手对永磁体做手脚,永磁体就会损坏,造成监测装置无法工作。2)如果机手调整犁铲,永磁体相对于机架(传感器)的位置就会发生变化,传感器监测不到永磁体就无信号输出,监测装置就无监测深度显示。3)为了满足不同地块、不同地区对深松深度的不同要求,在犁铲臂设置了对应不同深度的多个隐性永磁体,并在该位置设置深度刻线,既便于调整又能满足用户不同深度的需求。

图2 限位定位装置图
3.2 磁性限位定位装置的设计
如果犁铲相对于机架的调节位置传感系统能够监测到,也就是监测系统知道犁铲的位置,那么深松深度就可保证了。设计磁性限位定位装置的关键是如何在犁铲臂上镶嵌磁性材料并使其隐藏[4]。具体问题如下:1)磁性材料如何嵌入到隔磁材料中,采用什么工艺来保证磁性材料装配后磁性能不变;2)隔磁材料如何嵌入到犁铲臂中,使其和犁铲臂成为一个整体,终生不脱落;3)隔磁材料的加工问题。为此,利用creo三维建模软件设计了隔磁材料铝套,在犁铲臂上加工验证了用来安装铝套的孔的结构和装配方式。通过大量实验总结出了圆柱形磁铁与铝套、铝套与犁铲臂孔装配公差和装配工艺以及隔磁材料的加工是采用冷挤压工艺和冷挤压工艺公差。该设计的主要特点是:1)磁性定位方案的设计;2)隔磁材料的选取和隔磁套的结构设计及装配工艺,隔磁材料选用铝合金;3)磁铁、隔磁套、犁铲三者装配工艺的总结。保证装配后的稳定性及不可拆性,起到定位始终不变的作用。磁性限位装置结构图如图3所示。

图3 磁性限位装置结构图
3.3 深度探测定位限制装置设计
为了保证定位限位装置装配到犁铲臂上以后对原犁铲臂的强度和刚度不造成影响,在测绘原犁铲臂尺寸的基础上,通过强度和刚度的计算,确定了犁铲臂的尺寸。通过应用三维绘图软件creo绘制出了犁铲臂、永磁体隔磁套及永磁体零件的三维图,如图4所示,然后利用软件把这些零件装配在一起[5]。通过软件的装配公差分析功能,对犁铲臂、隔磁套及永磁体三者的装配公差及加工公差的合理性进行分析,最终确定了犁铲臂孔公差、隔磁套内外表面公差;通过软件的零件强度和刚度分析功能,对犁铲臂的强度和刚度进行了分析,最终确定了犁铲臂的合理尺寸。编制了零件的加工与装配工艺。
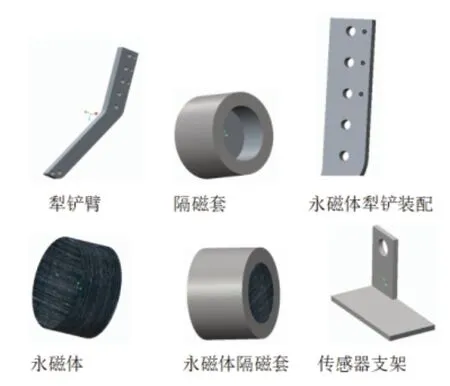
图4 深度探测定位限制装置零件三维图
4 性能试验与分析
4.1 试验
智能农机深松监测装置的技术和性能试验按照QB/T 1705—2017《智能农机深松监测》标准规定进行,并制定了智能农机深松监测装置产品试验大纲。
试验时间:2020年9月15日—9月20日。
试验地点:许昌市建安区张潘镇许昌小麦种植示范区。
试验条件:试验用地为秋收后玉米秸秆田和大豆秸秆田,秸秆和杂草覆盖率40%,秸秆和杂草覆盖厚度40 mm,且有些秸秆已压碎,地面平整,无明显的凸起和凹坑。
4.2 试验内容与结果
4.2.1 空载运行试验
空载运行在地头的水泥道路上进行,深松机架上各零部件紧固良好,无松动和错位现象;传感器、犁铲安装准确无误;空载运行工作时通过挡板实验犁铲三个位置的监测精度,通过10次试验,监测值在标准规定的范围内并满足技术要求;同时记录犁铲各位置的监测数据,为监测装置进入田间作业监测结果作比对。
4.2.2 田间性能试验
本试验为在某一调整值下的深松田地中随机抽样10个监测点,对10个监测点的实际深松深度和监测装置显示的深松深度进行记录,通过数据评定监测的结果,试验结果如表1所示。

表1 实验结果
表1数据表明:深松深度、监测深度无论是空载运行实验还是田间实际实验,其差异值都符合技术条件要求,在标准要求范围内。深松深度质量完全满足深松农艺要求,保证了深松深度一致性。
4.3 结论
试验结果表明,智能农机深松监测装置各性能指标符合设计要求,机具布局合理,结构参数设计得当,能满足规模化监测田间深松深度工序的农艺要求。该装置具有作业效率高、深松深度监测一致性好的优点,无论机手怎样调节,都能实现深松深度的一致性和不变性。
建议使用该监测装置时,做到农艺适应农机,耕整田地的起伏情况应满足机具的使用要求,有效减少机具使用时的调整工时,更好地提升机具的效率,提高机具的作业质量。
5 深松监测装置经济效益
5.1 有形效益
为推广农田深松工作,增加深松农机购置补贴、深松作业补贴成为一个重大的举措,引起社会广泛的关注。政府重视,财政支持,深松作业在数量上才有把握顺利完成。但是,深松作业的质量令人担忧,其中主要是深度和行间隔是否达标。对大面积作业状况连续测量,如何判断并防止漏松更难。因为政策是按面积补贴,为了省油和提高效率,在完成面积的同时,深度和间隔往往难以全面兼顾[6-10]。本设计改进解决了深度漏松的问题,节省了深松过程中监督、监测的用工,为深松推广提供了有力保障,其经济效益无法估量。
5.2 无形效益
在物联网技术高度成熟的今天,稳定可靠的深松监测装置为建立推广智慧农机系统提供了助力,监督监测人员在电脑前就能对各个深松点深松深度情况一目了然,为收集深松深度数据提供有力保障。
猜你喜欢
机械设计与制造(2022年10期)2022-10-12
农机质量与监督(2022年8期)2022-09-13
计算机仿真(2022年1期)2022-03-01
农机质量与监督(2021年7期)2021-12-23
河北农机(2021年3期)2021-03-31
微特电机(2020年11期)2020-12-30
微电机(2020年9期)2020-12-04
家庭影院技术(2019年12期)2020-01-19
科学与财富(2019年34期)2019-06-29
中国计算机报(2018年13期)2018-05-23
