某微型车四轮集中转向机构设计及验证
2022-02-21 03:04杨燕红韦龙星
汽车实用技术 2022年2期
王 勇,杨燕红*,3,韦龙星
某微型车四轮集中转向机构设计及验证
王 勇1,2,杨燕红*1,2,3,韦龙星1,2
(1.西华大学汽车测控与安全重点实验室,四川 成都 610039;2.西华大学汽车与交通学院,四川 成都 610039;3.西华大学流体及动力机械教育部重点实验室,四川 成都 610039)
在一些特定的场合,如汽车在站台、码头等地方作业时,由于空间狭小,需要使用到转弯半径小、转向灵活的微型车。针对此种需求,论文设计出了一种新型的微型车四轮集中转向机构,通过CATIA软件DMU运动机构模块对该转向机构进行了运动学仿真分析。结果表明,设计的转向机构满足微型车的转向要求;将该转向机构应用于实车上进行试验验证,试验表明该机构能很好地完成转向功能。
微型车;转向设计;运动仿真
前言
随着物流行业的快速发展,在如车站、码头等特定场合,微型车正成为仓库货物搬运的首选。车辆转向方式有两轮转向、四轮低速转向、四轮高速转向三种[1-3],传统的四轮转向机构由于结构复杂不适用于微型物流车,并且多数采用阿克曼转向,但实际应用的时候,转弯半径大、机动性能差、工作效率低。针对此类微型物流车,本文设计出新型的转向机构,该机构是基于左前车轮和右后车轮对角驱动底盘而设计的,具有机动性能强、转向灵敏、转弯半径小的特点。由于CATIA软件中的DMU仿真模块操作简单,相比于其他运动仿真软件,产生的误差在可接受范围内,常使用该模块完成转向机构的运动仿真[4],结合该仿真软件,对设计出的转向机构进行运动仿真,最后再进行试验验证,验证机构的合理性。
1 底盘驱动及转向设计
1.1 底盘驱动布置形式
底盘主要包括:驱动、电气、车架、悬架系统。使用电池作为能源供给,直流无刷电机作为动力输出,悬架系统采用U型和A型支臂、减震器和转向羊角作为整车支撑。两个直流无刷电机分别与左前、右后车轮相连,使两轮产生驱动力矩,如图1所示。
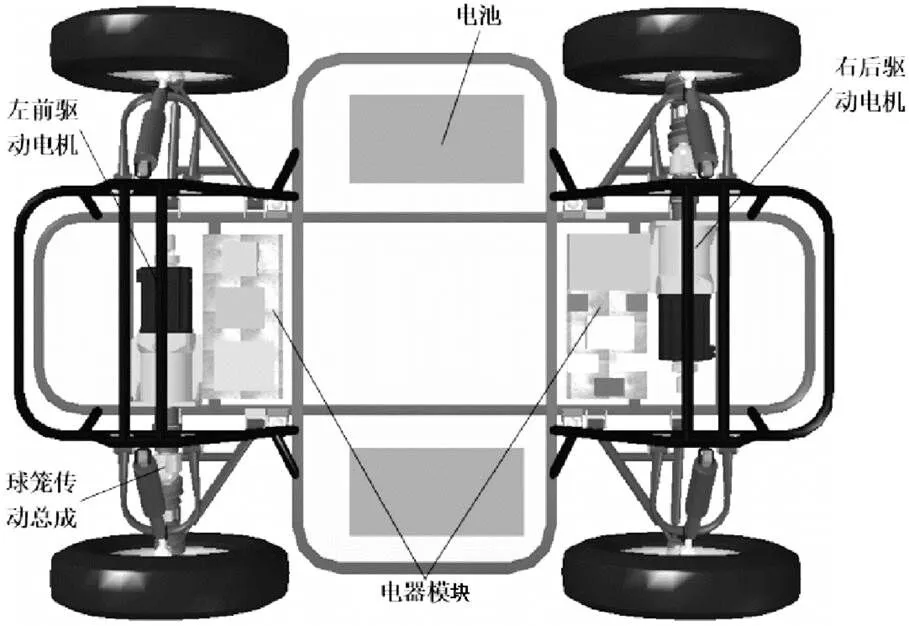
图1 底盘布置形式
1.2 驱动力矩分析
直流电机输出的转矩作用在传动轴上时,分解为沿轴和沿轴两个方向的力矩M和M,如图2所示。M使驱动轮绕轴偏转,M使驱动轮绕轴转动。
底盘前进时,需要保证左前、右后驱动轮逆时针旋转,并且两轮输出的转矩相同,左前、右后驱动轮的转矩分别分解为绕轴的M和绕轴的M。根据力学知识,左前驱动轮往右偏转,右后驱动轮往左偏转,左前、右后驱动轮产生的转矩M可以通过设计的转向机构相互抵消,保证两个驱动轮相对底盘都不发生偏转,如图3所示。根据转矩M方向,左前驱动轮和右后驱动轮都逆时针转动时,底盘实现直线行驶。底盘前进和后退需满足两轮输出的驱动力矩和旋转方向相同。

图2 直流电机输出扭矩分解图

图3 底盘直行
1.3 转向力矩分析

图4 底盘左转
底盘左转向时,左前驱动轮顺时针转动,右后驱动轮逆时针转动,已知转矩M方向,左前、右后驱动轮都往左偏转,此时设计的转向机构会带动另外两个从动轮向左偏转。已知转矩M方向,左前驱动轮顺时针旋转,右后驱动轮逆时针旋转,如图4所示。两个驱动轮产生的驱动力矩相同时,会受到等值且反向不共线的一对力F,从而形成力偶M,实现四个车轮同时向左偏转。同理,底盘右转向时,左前驱动轮逆时针转动,右后驱动轮顺时针转动,已知转矩M方向,左前、右后驱动轮都往右偏转。已知转矩M方向,左前驱动轮逆时针旋转,右后驱动轮顺时针旋转,当两个驱动轮产生的驱动力矩相同时,会受到等值且反向不共线的一对力F,从而形成力偶M,实现四个车轮同时向右偏转,如图5所示。
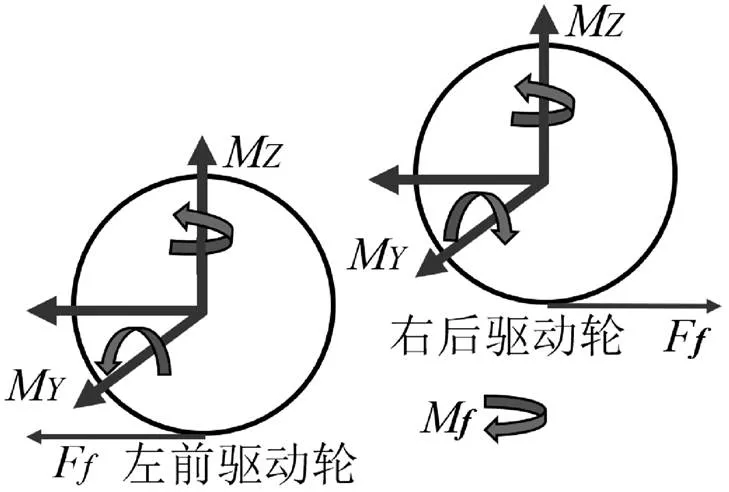
图5 底盘右转
1.4 转向机构设计
使用绘图软件完成底盘和转向机构的三维建模,左前、右后驱动轮为底盘提供驱动力,右前、左后车轮为从动轮,起支撑底盘的作用。根据相关参数及驱动、从动轮的偏转关系,设计出针对该类型底盘的转向机构。此类转向机构使用T型杆、转向球头、拉杆、固定底座等部件,T型杆利用转向球头与驱动、从动轮的转向节臂相连。驱动轮偏转时,同时带动T型杆绕固定底座上的转向铰链发生相对转动,T型杆带动同轴的从动轮偏转,从而保证四个车轮同时同向偏转。
2 运动仿真分析
运动仿真分析可以让转向机构的工作情况更加直观,能检测系统在运动过程中是否发生干涉,设计是否合理等。CATIA软件因可靠性能高,运动仿真结果清晰明了,能较好地反映机构或者系统的运动结果,在转向机构运动仿真中经常使用[5-6]。为了提高软件在仿真过程中的运行速度,在仿真开始之前,选定主要运动部件,对仿真过程无影响的零部件进行隐藏,在仿真时,运动部件主要包括:设计的转向机构、转向羊角、轮辋。仿真结果显示,设计的转向机构在运动过程中,没有发生任何干涉,并且球头的转动满足转向要求,四轮集中转向机构直行、左转向、右转向效果如图6所示。在T型杆处使用球头连接,这是因为使用CATIA的DMU模块分析此处时,如果使用钢化部件,则转向机构不能进行运动仿真。

3 试验验证
搭建转向机构,通过CAN总线向两个驱动电机发送指令,试验结果如图7所示。左转向时,车轮偏转角度为:左前轮37.6°,右前轮31.5°,左后轮36.4°,右后轮30.3°。右转时,车轮偏转角度为:左前轮30.7°,右前轮36.9°,左后轮31.2°,右后轮35.8°。

图7 试验结果
4 结论
本文针对某微型物流车设计了一种四轮集中转向机构,底盘采用对角驱动方式,转向机构主要利用对角驱动轮在旋转时自动偏转这一原理实现转向功能。在CATIA软件运动仿真模块中对转向机构进行了运动学仿真,结果表明,设计的转向机构合理,运行时没有发生任何干涉。最后进行了试验验证,结果表明,设计的转向机构能够实现直行、转向等功能,稳定可靠,转弯半径比同尺寸采用阿克曼转向原理的微型车小很多。
[1] 赵万忠,张寒,邹松春,等.线控转向机构控制技术综述[J].汽车安全与节能学报,2021,12(01):18-34.
[2] 戴金财,陈小开,黄超,等.某手动转向踏板式搬运车转向机构改进设计[J].机械设计与研究,2020,36(02):196-198.
[3] 郑竹安,李彤,熊新,等.大学生电动方程式赛车转向机构研究[J].农业装备与车辆工程,2020,58(02):22-25.
[4] 关亮亮,范旭,张恭矾,等.叉车转向机构建模及运动仿真[J].汽车实用技术,2019(11):31-32+35.
[5] 陈世平,马驹,彭景,等.基于CATIA的转向运动学仿真分析[J].中国汽车,2020(10):38-42.
[6] 乔晓亮,赵炜华,张永辉.客车转向机构的DMU运动仿真分析[J].汽车实用技术,2018(17):127-128.
Design and Verification of Four-wheel Centralized Steering Mechanism for a Micro Automobile
WANG Yong1,2, YANG Yanhong*1,2,3, WEI Longxing1,2
( 1.Key Laboratory of Automobile Measurement and Control & Safety, Xihua University, Sichuan Chengdu 610039;2.School of Automobile and Transportation, Xihua University, Sichuan Chengdu 610039;3.Key Laboratory of Fluid and Power Machinery of Ministry of Education, Xihua University, Sichuan Chengdu 610039 )
In some specific occasions, such as platform, wharf and other operations, due to the narrow space, need to use to turn radius small, flexible steering micro automobile. Aiming at this type of vehicle, a new type of micro four-wheel concentrated steering mechanism is designed. The kinematics simulation analysis of the steering mechanism is carried out by DMU motion mechanism module of CATIA software. The simulation results show that the designed steering mechanism meets the steering requirements of the micro automobile. The steering mechanism was applied to a real vehicle for experimental verification, and the test results show that the steering mechanism can complete the steering function well.
Micro automobile;Design of pipeline turning;Motion simulation
U463.4
A
1671-7988(2022)02-33-04
U463.4
A
1671-7988(2022)02-33-04
10.16638/j.cnki.1671-7988.2022.002.008
王勇,硕士,就读于西华大学汽车与交通学院,研究方向为汽车性能测试与仿真。
杨燕红(1970—),女,硕士,高级工程师,硕士研究生导师,就职于西华大学汽车与交通学院,主要研究方向为新能源汽车、汽车电控技术、自动化技术。
四川省重大科技专项项目:2019ZDZX0002;成都市科技局项目:2019-YF08-00003-GX。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年9期)2022-05-20
飞控与探测(2022年1期)2022-04-02
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
山东青年(2016年12期)2017-03-02
中学生数理化·八年级物理人教版(2014年2期)2014-04-02