纯电动环卫车电驱动系统参数匹配研究
2022-02-21 03:04赵金宝
汽车实用技术 2022年2期
赵金宝
纯电动环卫车电驱动系统参数匹配研究
赵金宝
(河南工业贸易职业学院汽车工程学院,河南 郑州 450000)
纯电动环卫车已成为城市日常生活的重要组成部分,为提高其动力性及作业效率,文章以一种基于平行轴变速箱与行星排集成的多模高效电驱动系统构型的纯电动环卫车为研究对象,首先对系统能够实现的模式进行了分析,其次以纯电动环卫车整车参数和动力性能为指标,分别匹配了驱动电机和作业电机峰值、额定功率、转矩及最高转速等参数,并搭建了整车动力学模型,通过仿真分析及系统台架进行爬坡和加速能力测试,证明系统参数匹配的有效性。
环卫车;驱动系统;参数匹配;性能测试
前言
目前国内的新能源环卫车以纯电动为主[1]。纯电动商用车的底盘具有技术相对简单、成熟、零排放、噪声小等优点,适于环卫车作业,采用纯电动环卫车能够大幅降低大气污染物含量,减少作业时的扰民问题,具有推广的内在动力[2-3]。
针对我国纯电动环卫车的应用需求,发展纯电动环卫车越来越重要[4]。但现有纯电动环卫车,作业、行驶电机无法复用,功率冗余大;电池配比重,整备质量高,作业能力差;驱动电机为直驱系统,满载爬坡度在15%以下,东风底盘采用6挡变速器,满载爬坡度在25%左右,与传统燃油车相比均存在差距,在部分大爬坡度区域及恶劣路况时动力不足。因此,开展纯电动环卫车双电机耦合驱动匹配研究,为使纯电动环卫车提高作业效率、降低能耗、拓宽环境适应提供了一种路径,达到节能环保要求,其经济和社会意义重大[5-6]。
1 研究对象
1.1 整车参数
本文以某款8.5吨压缩式纯电动垃圾车为研究对象,整车基本参数见表1。
表1 车型基本参数表
项目名称参数 整车参数整车总质量/kg8 500 整备质量/kg6 350 风阻系数0.55 迎风面积/m25.4 滚动阻力系数0.008 轮胎型号215/75R17.5 滚动半径/m0.372
结合产品实际运营工况,所要求的动力性指标有30分钟最高车速≥100 km/h;最大爬坡度≥35%;0 km/h~50 km/h加速时间≤12 s;续驶里程≥250 km。
1.2 动力系统构型及工作模式
文中动力系统构型方案如图1所示,采用双电机分别通过平行轴变速箱和行星排,进行动力耦合的电驱动系统新构型。锁止机构锁止行星架,实现整车对动力系统的需求。该构型采用行星排连接2AMT结构,当变速箱结合套挂在Ⅰ位置,驱动电机端齿轮通过从动轮①连接传动齿轮,由齿圈进行动力输出,此时速比关系为变速箱的一挡;当变速箱结合套在Ⅱ位置,从动轮①②放空,不进行动力输出,此时为空挡;当结合套挂在Ⅲ位置,驱动电机端齿轮通过从动轮②连接传动齿轮,通过齿圈进行动力输出,此时速比关系为变速箱的二挡。
作业装置可通过气压离合器与作业电机端齿轮伸出轴相连,作业电机端齿轮通过从动轮③和行星架连接齿圈、太阳轮进行动力输出。行星排结合套在两个位置,分别用于对行星架的锁止或分离,Ⅳ位置锁止行星架与变速箱壳体,Ⅴ位置将行星架与壳体分离。
当气压离合器分离时,行星排结合套位于Ⅳ位置,行星排结合套锁止,作业电机端齿轮通过从动轮③与太阳轮连接,最终由齿圈进行驱动动力输出,驱动电机和作业电机共同提供整车驱动力;当气压离合器结合时,行星排结合套处于Ⅴ位置,行星排结合套分离,行星架和太阳轮空转,驱动电机单独提供整车动力,作业电机单独驱动作业装置进行作业。
该结构用一套动力系统同时满足运输和作业两种使用需求。可实现换挡过程中无动力中断,驱动和作业可以分开工作,实现停车作业、行驶作业、单独行驶三种不同的工况,降低了系统功率及转矩冗余,提高了系统效率。
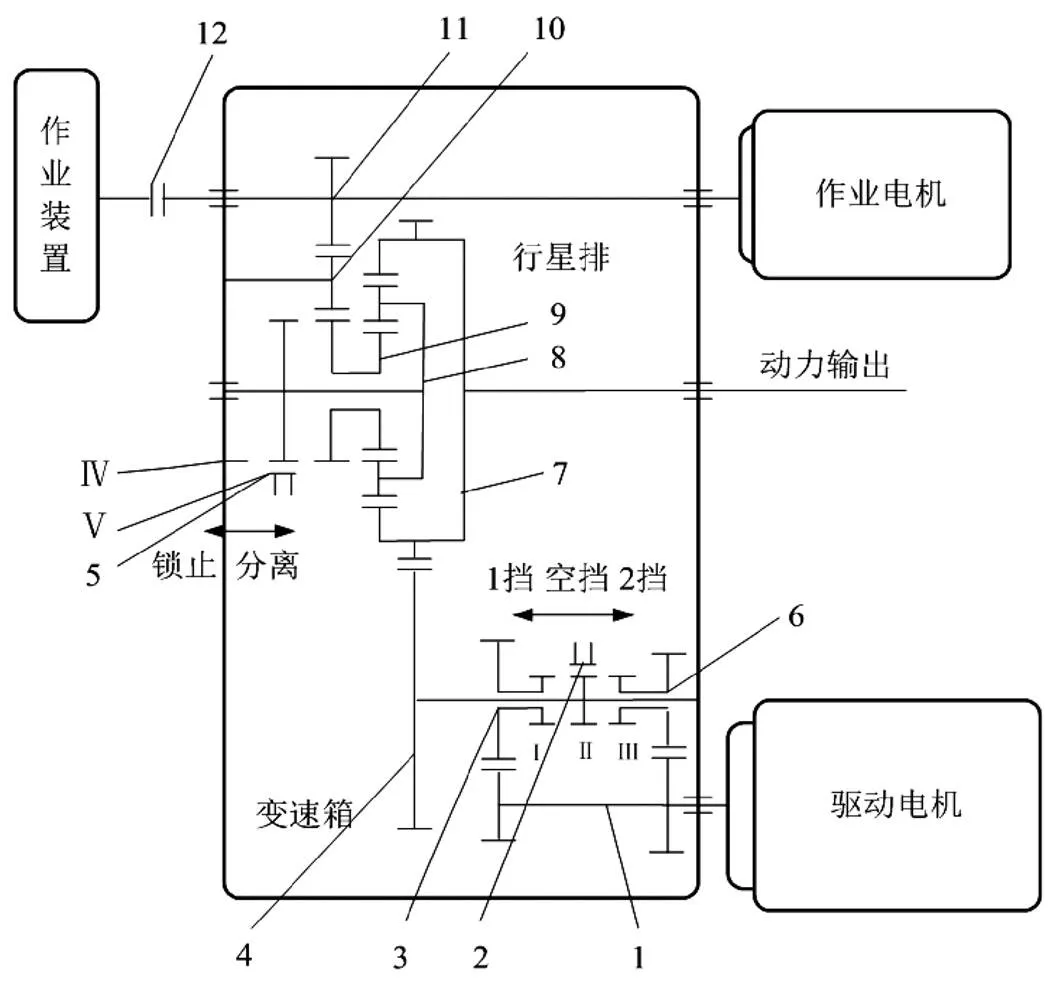
1—驱动电机端齿轮;2—变速箱结合套;3—从动轮①;4—传动齿轮;5—行星排结合套;6—从动轮②;7—齿圈;8—行星架;9—太阳轮;10—从动轮③;11—作业电机端齿轮;12—气压离合器。
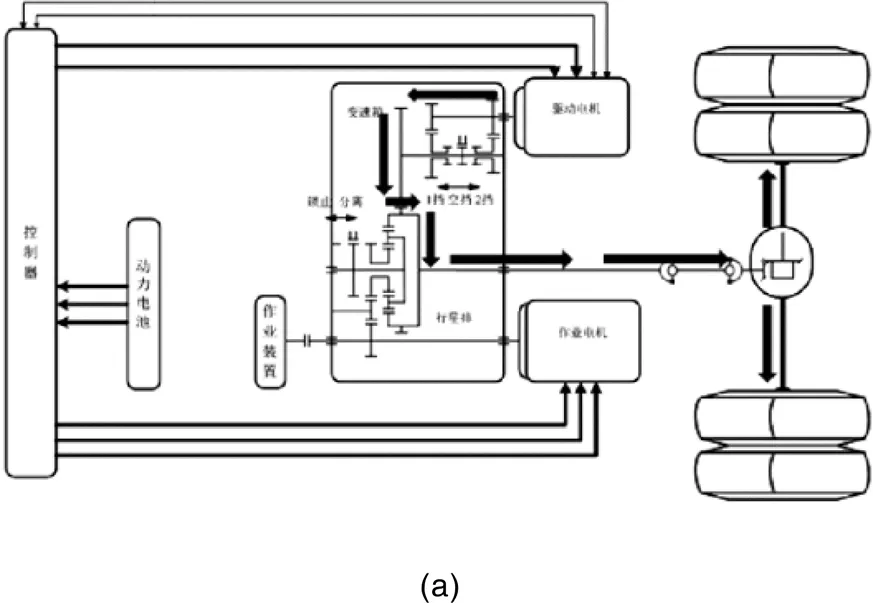
动力系统在工作过程中共有六种工作模式见表2。
表2 动力系统工作模式表
模式驱动电机两挡箱挡位辅助电机行星架挡位动力传递路线图 模式一工作一挡不工作分离2(a) 模式二工作二挡不工作分离2(a) 模式三工作一挡工作锁止2(b) 模式四工作二挡工作锁止2(b) 模式五不工作空挡工作分离2(c) 模式六工作一挡工作分离2(d)
图2为该构型方案的在不同模式下的动力传递。
2 匹配设计
2.1 匹配设计原则
电驱动系统参数匹配是纯电动环卫车研究的关键技术之一。合理的参数是纯电动环卫车性能良好的根本保障,也是对其进行能量管理控制策略开发和优化的基本前提[7-8]。电驱动系统的构型方案确定后,结合纯电动环卫车的动力性与经济性需求,进行参数计算与匹配。
依据纯电动环卫车运行工况,确定驱动电机和作业电机峰值、额定功率、转矩及最高转速等最优设计参数。
2.2 双电机功率参数
首先要根据整车最高车速、加速性能、爬坡度等动力性需求,确定电驱动系统的总功率要求。纯电动环卫车动力源最大功率由爬坡性能和加速性能指标决定。根据车辆动力学基础理论,需推导出纯电动环卫车在最大爬坡度和加速性能要求下的整车行驶需求功率,综合得出动力源所需功率。车辆驱动阻力功率平衡行驶方程如下:

式中,是车辆行驶需求的功率,单位为kW;为传动效率;是车辆整备质量,单位为kg;c是车轮滚动阻力系数;是重力加速度;是车辆的行驶速度,单位为km/h;是路面坡度角;是整车迎风面积,单位为m2;C是空气阻力系数;是旋转质量系数。
从最高车速、最大爬坡度、0 km/h~50 km/h加速时间的整车动力性要求出发,匹配两个电机的额定功率与峰值功率。它们需要满足纯电动环卫车的整车动力性要求。
电驱动系统的额定功率和峰值功率计算:根据整车在平直道路上行驶最高车速100 km/h的要求,所需的动力系统持续功率为:

设定整车持续爬坡度8%、爬坡车速35 km/h,所需的动力系统持续功率为:
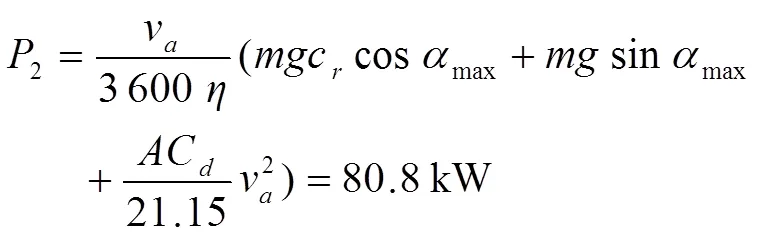
电驱动系统持续功率需大于等于上述条件的任意一个,即:
max≥(1,2)=80.8 kW (4)
根据最大爬坡度下,纯电动环卫车要保持稳定车速所需要的功率以及车辆完全加速时所需的功率来确定电驱动系统峰值功率:
根据整车最大爬坡度35%以及爬坡车速15 km/h的设计要求,计算电机功率为:

根据车辆动力学原理,纯电动环卫车在平直路面0 km/h~50 km/h加速时间≤12 s的设计要求,计算动力系统功率为:
电驱动系统峰值功率应该满足上述条件的任意一个,即:
max≥(3,4)=130.5 kW (7)
综上所述,电驱动系统所需峰值功率为130.5 kW,额定功率为80.8 kW。考虑该动力系统作业电机不能辅助驱动的极端条件下,需要单独通过驱动电机来实现最高车速的需求,驱动电机峰值功率取132 kW,其额定功率确定为82 kW。作业电机主要用于上装作业,根据现有车型选取所需功率,取峰值功率取38 kW,额定功率19 kW。
2.3 双电机转矩与转速
纯电动环卫车在爬最大坡度时,保持最低稳定车速所要克服的阻力转矩即为电驱动系统需输出的峰值转矩,另外,该电驱动系统构型可通过驱动电机和作业电机协同工作来达到最大爬坡度的需求。
依照车辆最大爬坡度35%、爬坡车速15 km/h的设计要求,所需的电驱动系统峰值转矩为:
根据整车指标满足最大爬坡度≥35%的需求和计算结果,设定一定的余量,最终确定动力系统峰值转矩为2 520 Nm。整车控制逻辑规定,最大爬坡度需求转矩由驱动电机一挡输出转矩和作业电机输出转矩通过行星排耦合输出,根据平行轴变速箱速比关系和行星排特征值,确定纯电动运环卫车驱动电机峰值转矩为420 Nm,作业电机峰值转矩为200 Nm。
根据电驱动系统峰值转矩以及峰值功率,计算可得电机额定转速为:
n=P·9 550/T(9)
通过计算可得:驱动电机额定转速为3 000 rpm,作业电机额定转速为1 800 rpm。
电机的额定转矩计算如式:
通过计算可得:驱动电机额定转矩为260 Nm,作业电机额定转矩为100 Nm。
电驱动系统的最高转速是车辆所能达到的最高车速,约束电驱动系统的峰值转速:

式中:v是车速,单位为km/h;e是动力系统转速,单位为rpm;为车轮滚动半径,单位为m;o为主减速比。
通过计算可得,电驱动系统所需峰值转速:3 479.65 rpm。
整车可通过驱动电机在变速箱AMT2挡,即变速箱速比是2的情况下,即可达到最高车速100 km/h,可得到电驱动系统所需峰值转速为7 200 rpm。根据作业装置通过作业电机转速控制,可依据现有作业装置匹配作业电机的峰值转矩为5 400 rpm。
2.4 动力电池匹配
动力电池的电量设定需要按纯电动环卫车整车续航里程的要求匹配。动力电池总电量的匹配设计,首先需要考虑电驱动系统及其他耗能电附件等的功率,其次还需要考虑电池SOC余量,最后还需考虑低温条件下电池自加热的功率需求。
动力电池参数匹配需要满足电驱动系统总功率、续驶里程及高效率要求。动力电池的总功率需与双电机总功率相匹配,即动力电池的输出功率要大于驱动电机和作业电机总的峰值功率,否则不能达到纯电动环卫车整车动力性能指标要求。
由于纯电动环卫车整车只有动力电池是唯一能量来源,助力转向、空气压缩机、加热等附件全需要动力电池提供能量,相关零部件都要实现电动化。因此动力电池总功率还满足电机峰值功率和电附件功率同时输出时的功率需求:
式中,P动力电池输出功率,单位为kW;η为驱动电机效率;η为逆变器效率;P为电附件功率,单位为kW。
动力电池功率等于电池电压与电流的乘积,因整车需求功率较高,电池电压越低则系统电流越大,过大电流会加大高压传输系统发热损失,降低电驱动系统总效率,进而影响整车经济性水平提升,因此,动力电池采用650 V的高电压平台。
根据汽车行驶方程式,可计算出纯电动环卫车以V匀速行驶时的整车需求功率P:

进而,可计算出按此车速行驶完,该纯电动环卫车续驶里程所需要的能量:
W=P·(/V) (14)
式中,P为纯电动环卫车整车需求功率,单位为kW;V为车辆匀速行驶时的车速,单位为km/h;W为车辆续驶里程内所需能量,单位为度;为纯电动环卫车续驶里程,单位为km。
另外,动力电池SOC不可以降低为0,为0时会造成动力电池“过放”,影响动力电池使用寿命。从纯电动环卫车实际运营的角度出发,一般在动力电池SOC剩余不足20%后,需要给动力电池充电。因此,动力电池最终电量,在结合续驶里程进行计算后,还需要考虑剩余SOC问题,计算公式如下所示:
式中,ξ为动力电池可用SOC范围;η为动力电池系统充放电效率。根据整车指标,计算结果如下:
电池容量应大于152.8 kWh,持续放电功率应大于105 kW,峰值放电功率应大于306 kW。
表3 双电机与变速箱主要参数表
指标参数 驱动电机功率(额定/峰值kW)82/132 转速(额定/峰值rpm)3 000/7 200 扭矩(额定/峰值Nm)260/420 作业电机功率(额定/峰值kW)19/38 转速(额定/峰值rpm)1 800/5 400 扭矩(额定/峰值Nm)100/200 行星排特征值2.63 平行轴变速箱速比5.025/2.029 动力电池电池容量153 持续放电功率/kW105 峰值放电功率/kW306
基于纯电动环卫车整车参数和动力性能指标,完成了驱动电机和作业电机分别通过平行轴变速箱和行星排,进行动力耦合的电驱动系统参数匹配,最终的参数匹配结果见表3。
3 整车模型建立及仿真
基于Simulink仿真工具,搭建了纯电动环卫车整车动力学模型,以分析纯电动环卫车的动力性和经济性。通过对现有纯电动环卫车整车构型及动力系统分析,建立与实车关键部件相对应的模块,建立整车模型,具体如图3所示。主要包括整车控制器模型、驾驶员模型、轮胎模型、车体模型、车轮模型、路面模型。
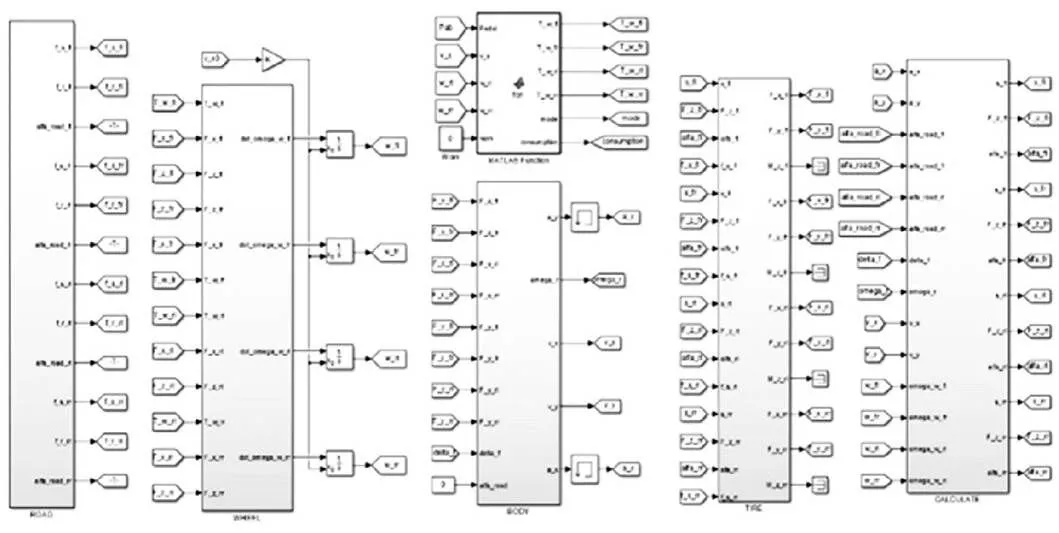
图3 纯电动环卫车整车动力学模型
对于经济性能指标,分别基于等速法与工况法(C-WTVC),对纯电动环卫车整车经济性进行了仿真,结果见表4。
表4 纯电动环卫车仿真结果
工况百公里耗电量/kWh最大爬坡度/%0~50km/h加速时间/s 40 km/h等速31.6356.1 C-WTVC34.3
经仿真分析,驱动电机在变速箱1挡和作业电机耦合工作时,最大爬坡度可超过35%,在驱动电机1挡和作业电机耦合工作时加速最快,0 km/h~50 km/h加速时间约为6.1 s,验证了新构型电驱动系统参数匹配的有效性。
4 试验台架测试
试验台架主要由测功机、电池模拟器、操作控制系统、数据采集系统、冷却装置和功率分析仪组成,如图4所示。其中,测功机具有电机扭矩、转速的测试功能;电池模拟器可以提供且回馈电能;操作控制系统主要由测试台、测试软件和监控软件构成,用以实现实验过程中的数据测量和状态监控等;冷却装置主要为被测动力系统的冷却系统提供冷却水;功率分析仪用于测试电机的电压、电流和电功率等参数。
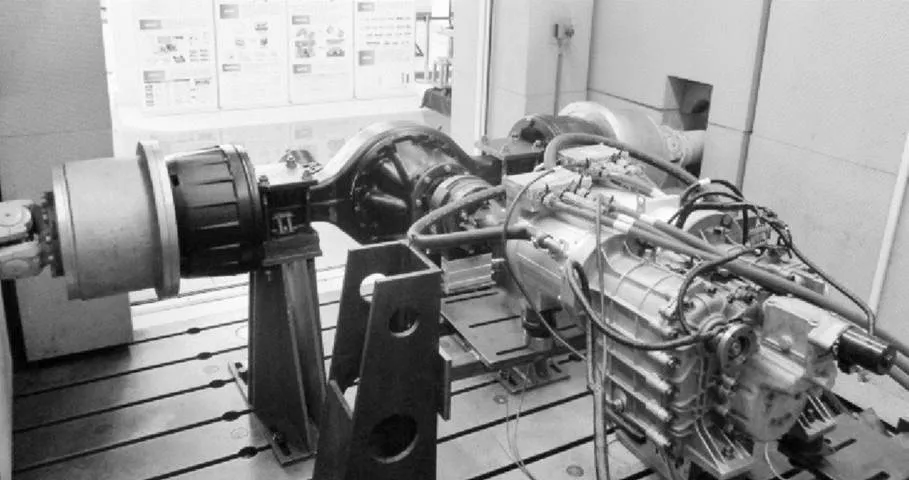
图4 试验台架
动力系统在台架上调试完成后,分别进行了动力系统峰值转矩、最高转速测试。结果如表5所示,与匹配值相差不大,证明了匹配的有效性。
表5 动力系统台架性能测试结果
测试项匹配值实测结果 动力系统峰值转矩/Nm2 3872 410 动力系统最高转速/rpm3 4803 615
5 结论
本文以一种基于平行轴变速箱与行星排集成的多模高效电驱动系统构型的环卫车为研究对象,基于纯电动环卫车整车参数和动力性能指标,匹配驱动电机和作业电机峰值、额定功率、转矩及最高转速等参数。搭建了整车动力学模型,通过仿真分析,整车的最大爬坡度达到35%,0 km/h~50 km/h的加速时间为6.1 s,C-WTVC工况下整车的百公里电耗为34.3 kWh。搭建系统测试台架并进行了动力系统峰值转矩和最高转速测试,证明系统参数匹配的有效性。
[1] 华泰证券.新能源环卫车行业专题报告[R].未来智库,2020.
[2] 季明烨.新能源环卫车现状及发展态势分析[J].专用汽车, 2015(09):62-64.
[3] 王建建,刘效磊.新能源专用车市场发展现状与趋势判断[J].专用汽车,2016(03):53-56.
[4] 屈孝和,范帅,刘飞霞.轮边驱动单发动机道路洗扫车的研究[J].建设机械技术与管理,2014(08):93-96.
[5] 阎备战,张晓伟,左利锋,等.一种纯电动环卫车动力系统及环卫车:CN201810127989.0[P].
[6] 金鑫君,罗方赞,郑丽辉,等.基于ADVISOR纯电动汽车动力系统参数匹配优化研究[J].机械工程师,2017(10):96-98.
[7] 王君银,何锋,杨冬根,等.纯电动商务车动力系统匹配与性能仿真[J].机械设计与制造,2017(08):235-238.
[8] 李红朋,胡明辉,谢红军,等.基于工况分析法的电动汽车参数匹配[J].重庆理工大学学报(自然科学),2013,27(1): 13-17.
Research on Parameter Matching of Electric Drive System of Pure Electric Sanitation Vehicle
ZHAO Jinbao
( College of Automotive Engineering, Henan Industry and Trade Vocational College, Henan Zhengzhou 450000 )
Pure electric sanitation vehicle has become an important part of urban daily life. In order to improve its power performance and operation efficiency, this paper takes a pure electric sanitation vehicle with multi-mode high-efficiency electric drive system configuration based on the integration of parallel shaft gearbox and planetary row as the research object. Firstly, the mode that the system can realize is analyzed, Secondly, taking the whole vehicle parameters and dynamic performance of the pure electric sanitation vehicle as the index, the peak value, rated power, torque and maximum speed of the driving motor and working motor are matched respectively, and the whole vehicle dynamic model is built. The effectiveness of the system parameter matching is proved by simulation analysis and the climbing and acceleration ability test of the system bench.
Sanitation vehicle;Driving system;Parameter matching; Performance testing
U469.72
A
1671-7988(2022)02-01-06
U469.72
A
1671-7988(2022)02-01-06
10.16638/j.cnki.1671-7988.2022.002.001
赵金宝(1986—),男,助教,硕士研究生,就职于河南工业贸易职业学院汽车工程学院,主要研究方向为新能源汽车整车匹配及控制。
猜你喜欢
中国畜牧杂志(2022年10期)2022-10-12
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
舰船科学技术(2022年10期)2022-06-17
飞控与探测(2022年1期)2022-04-02
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
价值工程(2017年11期)2017-04-18