一种机械式四轮转向系统性能分析
2022-02-21 03:16程修正李建华李长征孙任飞
汽车实用技术 2022年2期
程修正,李建华,周 傲,李长征,孙任飞,刘 康,冒 坚
一种机械式四轮转向系统性能分析
程修正,李建华,周 傲,李长征,孙任飞,刘 康,冒 坚
(吉林大学汽车工程学院,吉林 长春 130022)
现有汽车的四轮转向装置结构复杂成本高昂,不适合在整车轻便且平价的民众车型上使用。文章提出一种基于飞锤离心装置控制的机械式汽车四轮转向系统,该系统利用飞锤感应车速,在低速行驶时实现前后轮反向偏转以减小汽车转向半径,中速行驶转向时后轮不辅助转向,高速行驶转向时前后轮同向偏转进而提高行驶稳定性,不同车速下后轮辅助转向幅度逐渐变化,无级调节,使具有该系统的汽车在日益复杂的交通状况下更加灵活和稳定。通过对该系统进行仿真验证,得到了预期的运算结果。
汽车;四轮转向;机械结构;飞锤
引言
据公安部交通管理局发布的消息,2020年全国汽车保有量为2.81亿辆,汽车驾驶人4.18亿人。根据国内刘娜[1]等人对驾驶员转向行为的研究,车流量、车距、车速对转向影响依次减弱。针对大城市汽车泛滥,缺少车位,车道拥堵的情况,我们必须提高汽车的灵活性,减少汽车的转弯半径以面对日益复杂的行车工况,而最有效的方式便是采用四轮转向系统。根据城市道桥与洪防[2],2017年末我国高速公路里程为13.65×104km,其规模达到世界第一,汽车在高速公路行驶的机会也大大增加,面对高速公路上频发的交通事故,汽车高速行驶时横摆角速度需要优化,以提升高速转向稳定性。
四轮转向是指汽车在转向的过程中,4个车轮可依据前轮和行车速度等信号同时相对车身发生偏转。第一代是机械式系统,转向器分别安装在前后轮上,两转向器之间通过机械装置相连接。这种系统的优点是结构简单,可靠性高,缺点是中间传动装置占用空间过大,不适合小型车。第二代四轮转向系统利用液压系统来控制转向,这种类型的四轮转向系统的后轮只能偏转的1.5度左右,并且也只有在速度高于35 km/h才起作用。辅助系统对转向性能提升有限。第三代是电控式4WS系统,它主要由ECU、转向角度传感器、车速传感器、和执行机构成。缺点是所涉及到的电子设备过多,不稳定因素增多,且造价高昂。
羊玢、陈宁[3]建立了四轮转向车辆(4WS)的动力学模型,基于单点预瞄的驾驶员数学模型,编写了四轮转向车辆在S型道路和复杂赛车跑道行驶的闭环运动仿真程序,对比例控制策略的四轮转向车辆进行运动学和动力学进行高速动态仿真,表明在高速行驶下的四轮转向车辆操纵稳定性优于前轮转向车辆,系统具有良好的动态特性,更能有效地提高车辆瞬态操纵稳定性和安全性。田然、肖本贤[4]在MATLAB/Simulink仿真研究中发现基于横摆力矩和四轮转向结合的控制策略能有效减小之心偏侧角,摆角速度可以很好地跟踪理想值,提高了车辆的操作稳定性。Hamid Taghavifar;Chuan Hu[5]运用四轮主动转向模型研究了底盘控制系统对车性能与稳定性的作用。与传统的前轮转向车辆相比具有优越的操纵稳定性。国内外的研究面向提升与改进4WS系统,优化结构,提升稳定性,但偏于理论性,投入远大于可能的收益,未必能够普及。本项目组发明的新型离心式四轮转向系统将突破这些研究障碍。
1 4WS控制系统搭建
对于四轮转向车辆,同样根据上述阿克曼原理,假设四轮转向的瞬时中心在车辆质心的水平延长线上,即可由车辆的基本结构参数计算出四轮转角,如图1所示。图中,为等效前轮转向角,为汽车质心至前轴的距离,为汽车质心至后轴的距离,1为前轮轮距,2为后轮轮距,可得四轮转角为:

,。
2 设计方案
如图2及图3所示,该系统方向盘控制连接液压泵1和液压泵2的阀1(2)和阀2(3)。飞锤(17)通过主减速器输出齿轮的转速决定了飞锤摆锤(24)的离心力大小,从而飞锤输出(26)带动油路调节挡片随飞锤张开杠杆发生位移,使得挡片与油路重合度变化,决定油路最大流量,进而决定液压泵1(9、10)液压泵2(13、14)效果。方向盘(1)的旋向及转幅使液压缸不同侧高压油流量不同,对后轮输出不同的转向助力。
飞锤弹簧提供预紧力,低速转速最低值时液压泵1油路完全与调节挡片孔位对齐,高速最大转速值时液压缸2与调节挡片孔位完全对齐,飞锤油路挡片开孔距离与车速平方成比例,最低转速与最高转速向中转速靠拢时油路与调节挡片孔位重合度逐渐减小,液压缸1或液压缸2所产生的偏转力矩变小,后轮辅助转向作用逐渐变小,以此保证转向的平顺性。
方向盘偏转过小时可能来自汽车行驶时的方向盘抖动,液压缸产生偏转力矩小于阻力矩,后轮不起辅助转向效果,反映到方向盘上体现为有一定的空行程,后轮通过两侧轮胎与车桥连接弹簧实现预紧,由液压缸对后轮一侧施压,使两后轮出现力矩差,与后轮弹簧弹力矩得到两后轮偏转力矩,从而实现控制后轮旋转角度。
车速在0 km/h~30 km/h认定为低速挡,由图3可知液压缸1有效,液压缸2无效。在低速左转液压泵1左侧高压油流量大于右侧高压油流量后轮右转,而在低速直行液压泵1左右两侧高压油流量相同后轮不发生偏转,保持直行。在低速右转时液压泵1右侧高压油流量大于左侧高压油流量后轮向左偏转。车速在30 km/h~60 km/h定为中速挡位,此时液压泵1液压泵2油路不通都无转向助力,后轮不起辅助转向作用。车速在60 km/h~90 km/h定为高速挡位,高速左转液压泵2左侧高压油流量大于右侧高压油流量,后轮左转,高速直行液压泵2左右流量相同后轮不转,高速右转液压2右侧供油后轮右转。
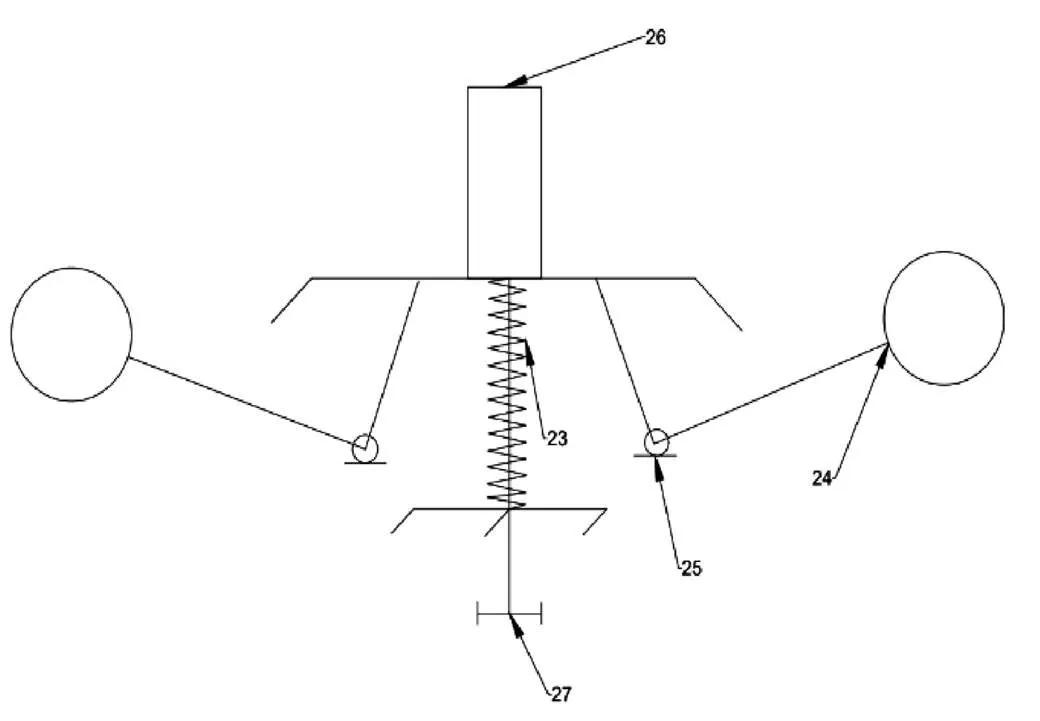
23—飞锤预紧弹簧;24—飞锤摆锤;25—支点;26—飞锤输出;27—输入转向轴。
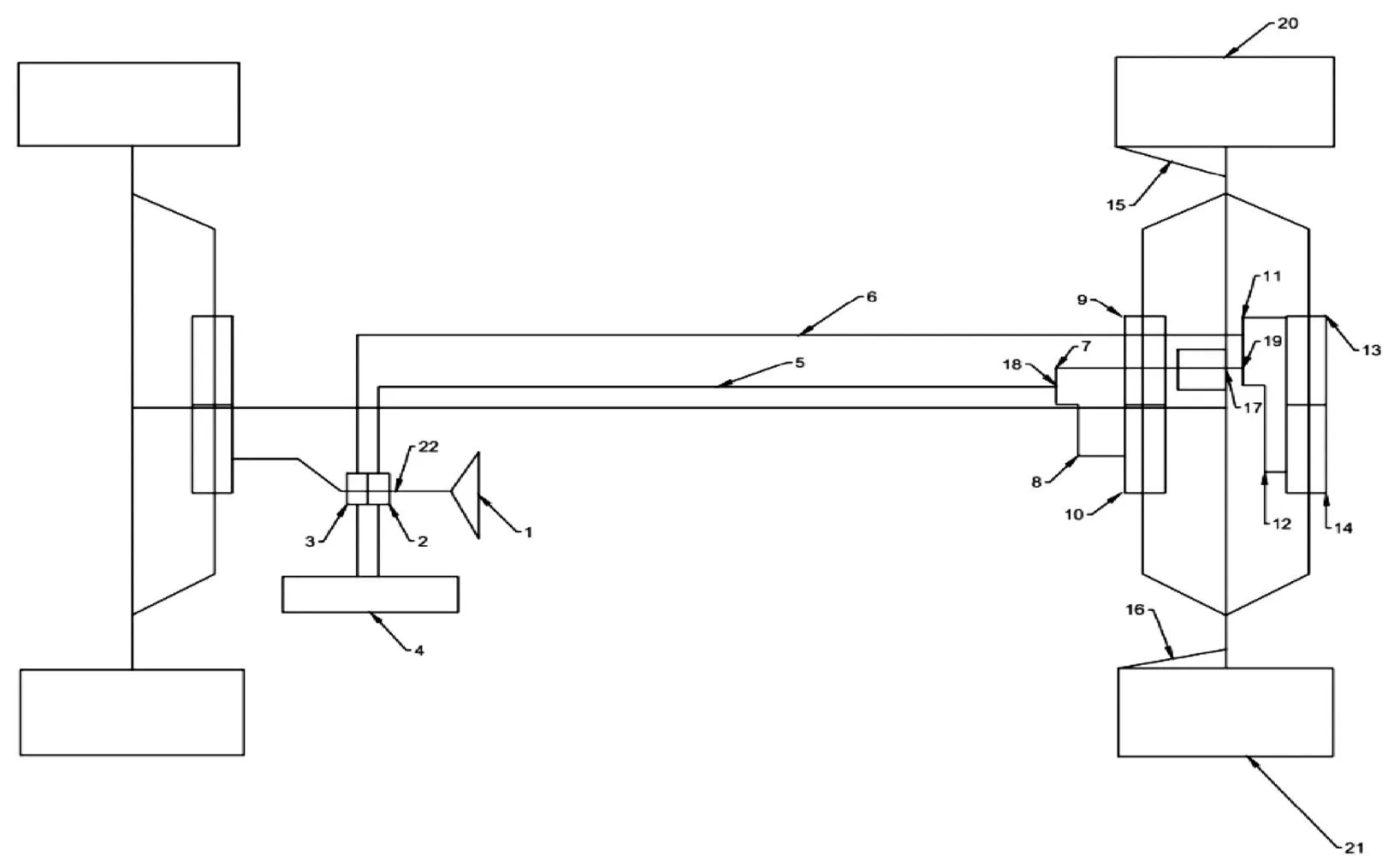
1—转向盘;2—阀1;3—阀2;4—高压油箱;5—液压泵1油道;6—液压泵2油道;7—液压泵1右输油道;8—液压泵1左输油道;9—液压泵1右半部分;10—液压泵1左半部分;11—液压泵2右输油道;12—液压泵2左输油道;13—液压泵2右部分;14—液压泵2左部分;15—后轮右侧弹簧;16—后轮左侧弹簧;17—飞锤;18—液压泵1挡片部分;19—液压泵2挡片部分;20—后轮右胎;21—后轮左胎;22—飞锤输入齿轮。
3 模拟实现
图4 转向半径优化前后对比图
图5 横摆角速度优化前后对比图
实验条件:轴距2.875 m,方向盘有效转角幅度定为36°到360°,前轮转角幅度定为36°后轮转角方向盘幅度为4.5°,前轮后轮转角比例8:1,转弯半径和横摆角速度模拟结果如图4、图5所示。
图中,在车速低于30 km/h时,经过系统优化汽车转弯半径曲面为下曲面,横摆角速度为上曲面,未优化汽车转向半径为上曲面,横摆角速度为下曲面。在车速高于60 km/h时转弯半径为上曲面,经过系统优化汽车横摆角速度为下曲面,转向半径为上曲面,未经系统优化汽车横摆角速度为上曲面,转向半径为下曲面。30 km/h~60 km/h时转弯半径与横摆角速度系统优化前后两曲面重合。在低速区间以转弯半径小,车辆灵活为优,在高速区间以横摆角速度低,驾驶稳定为优,图示结果符合预期。
4 结论
虽然我国汽车保有量巨大,但目前民用低价格4WS转向系统存在市场空缺,相对于传统电控机构,本研究有更高的稳定性、可靠性。电子系统存在老化的问题,机械系统的损伤可预测性更强。本研究创新性地从飞锤控制系统着手,在车速低于30 km/h时转弯半径更小,低速过弯或入库时更灵活。在车速高于60 km/h时增大了转弯半径,减小了横摆角速度,可以提升高速转向过弯时的驾驶稳定性。该系统在低速与高速之间过渡为渐进式,可以有防止后轮辅助转向突然介入导致驾驶员误判带来误操作以至发生危险。研究成果可以应用于广大中低端车型,提升人民群众对于汽车驾驶体验,增强了汽车安全性。
[1] 刘娜,周华,曹毅,等.汽车与两轮车事故中驾驶员转向行为影响因素研究[J].科学技术与工程,2017,17(33):344-348.
[2] 佚名.我国高速公路里程突破14万km[J].城市道桥与防洪, 2019(04):130.
[3] 田燃,肖本贤.四轮转向车辆的直接横摆力矩控制研究[J].机械设计与制造,2020(05):175-179+184.
[4] 羊玢,陈宁,田杰,等.基于驾驶员模型的4WS车辆操纵稳定性研究[J].机械科学与技术,2014,33(04):578-582.
[5] Hamid Taghavifar,Chuan Hu,Leyla Taghavifar,Yechen Qin, Jing Na,Chongfeng Wei.Optimal robust control of vehicle lateral stability using damped least-square backpropagation training of neural networks[J]. Neurocomputing,2020,384.
Overview of a Mechanical Four Wheel Steering System
CHENG Xiuzheng, LI Jianhua, ZHOU Ao, LI Changzheng, SUN Renfei, LIU Kang, MAO Jian
( School of Automotive Engineering, Jilin University, Jilin Changchun 130022 )
The existing four wheel steering device is complex in structure and high in cost, so it is not suitable for use on a light and affordable public vehicle. This paper presents a mechanical four wheel steering system based on flyweight centrifugal device. The system uses flyweight to sense the speed of the vehicle, and realizes the reverse deflection of the front and rear wheels at low speed to reduce the steering radius of the vehicle. At medium speed, the rear wheels do not assist in steering, while at high speed, the front and rear wheels deflect in the same direction, so as to improve the driving stability. At different speeds, the rear wheel assists steering range changes gradually and is continuously variable, which makes the vehicle with this system more flexible and stable when used in increasingly complex traffic conditions. Through the simulation verification of the system, the expected calculation results are obtained.
Automobile; Four wheel steering; Mechanical steering; Flying hammer
U463.4
A
1671-7988(2022)02-61-04
U463.4
A
1671-7988(2022)02-61-04
10.16638/j.cnki.1671-7988.2022.002.015
程修正(2000—),男,就读于吉林大学汽车工程学院车辆工程专业,研究方向:车辆工程。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
中国军转民(2021年11期)2021-12-13
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
小学生学习指导·爆笑校园(2019年6期)2019-09-10
科技风(2018年6期)2018-10-21
中学课程辅导·教师通讯(2018年10期)2018-09-04
大经贸(2017年8期)2017-09-26
发明与创新·中学生(2017年7期)2017-07-10
中学生数理化·高一版(2017年3期)2017-07-08
红蜻蜓(2015年11期)2016-02-02