基于前轮转角约束自适应模型预测控制的路径跟踪研究
2022-02-21 03:16李楚琳唐雪梅杨朝阳张仪夫
汽车实用技术 2022年2期
李楚琳,唐雪梅,杨朝阳,张仪夫
基于前轮转角约束自适应模型预测控制的路径跟踪研究
李楚琳,唐雪梅,杨朝阳,张仪夫
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
针对在车辆行驶中较小的前轮转角无法充分利用路面附着能力,较大的前轮转角使得车辆的行驶稳定性差的问题,文章提出了一种前轮转角约束自适应模型预测方法。首先建立车辆的动力学模型,然后通过计算得到轮胎纵向力,最终得到车辆的前轮转角。将车辆的状态量与前轮转角自适应约束条件输入给模型预测控制器,输出车辆的前轮转角,实现对参考路径的跟踪。在Carsim和MATLAB平台上联合仿真,仿真结果表明前轮转角约束自适应模型预测控制的车辆相比固定转角约束的车辆具有较好的跟踪能力和稳定性。
前轮转角约束自适应;模型预测控制;路径跟踪
前言
近年来,随着计算机,传感器和通信技术的发展,无人车辆已经成为车辆工程领域重要的研究方向[1-2]。路径跟踪控制是实现车辆自动驾驶的关键环节,在满足车辆安全性要求的前提下,需要达到最大程度的跟踪精度和稳定性。目前路径跟踪领域常用的控制理论主要有纯追踪控制理论[3]、LQR控制理论[4]、PID控制理论[5]、预瞄控制理论[6]、滑模控制理论[7]和模型预测控制理论等[8]。针对模型预测控制理论,主要研究在控制过程中增加多种约束条件,同时控制多个系统变量。本文通过建立车辆三自由度动力学模型,在模型预测控制器中加入额外的前轮转角自适应约束,以直线为参考路径,分别在不同的路面附着系数以及不同的车速下联合仿真并验证了前轮转角自适应模型预测控制控制策略的有效性。
1 车辆动力学模型


图1 动力学车辆模型
根据牛顿第二定律可以得到车辆动力学非线性模型公式如式(1)所示:
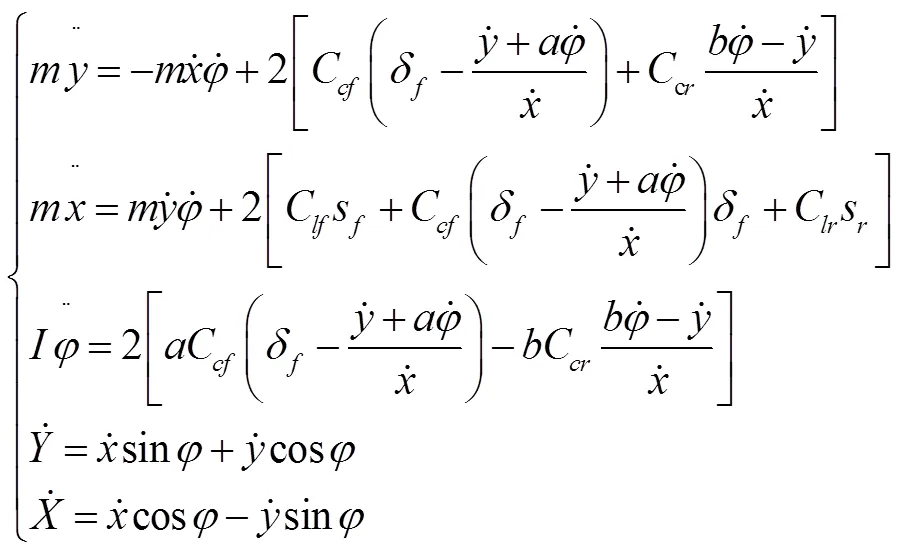
式中,、分别前后轴距,为车辆质量,为转动惯量。C CC C分别为前后轮轮胎的刚度,s s分别为前后轮胎滑移率。
2 前轮转角约束自适应模型预测控制器设计
2.1 转角约束自适应模型预测控制总体设计
前轮转角约束自适应模型预测控制器的设计如图2所示。通过车辆当前状态输出滑移率,侧偏角以及轮胎垂向载荷可以得到轮胎的纵向力,基于附着椭圆可以得到轮胎的侧向附着力,进而得到车辆当前状态下的前轮转角。当前车辆的前轮转角和车辆的其他状态量以及参考轨迹共同输入到模型预测控制路径跟踪控制器中。在模型预测跟踪控制器中,首先建立车辆动力学模型,并对其线性化离散化;其次,设计目标函数和约束函数,最后,采用二次规划求解方法求解出每个控制时域内的最优控制序列,并将每个序列中的第一个控制量即前轮转角输出给车辆,得到当前时刻的车辆状态。如此,形成闭环系统,实现车辆的路径跟踪功能。
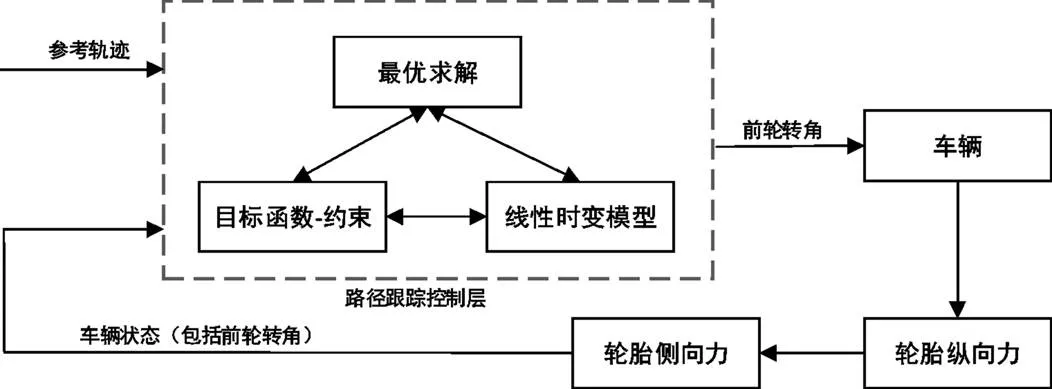
图2 前轮转角自适应模型预测控制策略
2.2 前轮转角约束条件
通过MF-Swift轮胎模型公式,求得纯滑移状态下的轮胎纵向力和组合滑移状态下的轮胎纵向力。式(2)为组合滑移状态下的轮胎纵向力公式。

式中10为纯纵滑状态下轮胎纵向力,为轮胎侧偏角,df为垂直载荷增量,为轮胎纵向滑移率,λ为组合滑移工况下轮胎纵向力特征量加权因子,γ1γ2γ1γ2γ1γ2γ1为纵向力特性参数。
在一定的附着条件下,轮胎的纵向与侧向附着力满足附着椭圆关系,可通过附着椭圆求得轮胎的侧向附着力。在已知侧向附着力F情况下,
可得到车辆的转向半径表达式,如式(3)所示:

通过车辆动力学模型可得到前轮转角与车辆转弯半径的关系式,如式(4)所示:
=/+(1-2) (4)
结合式(3)与式(4)以及车辆动力学模型,可得到前轮转角的表达式如式(5)所示。

其中为轴距。
最终前轮转角自适应约束条件如式(6)所示。

2.3 模型预测控制器设计
将非线性三自由度车辆模型进行线性离散化,迭代后可得到输出量预测方程,模型预测方程选择车辆侧向位移、车辆横摆角、车辆质心侧偏角、车辆横摆角速度四个参数作为输出量。输出量表达式如式(7)所示。


设计约束条件时,需要对控制量,控制增量,以及输出量进行约束。其中输出量约束需要考虑车辆稳定性的表征参数即车辆质心侧偏角和横摆角速度。在高附着路面上,稳定行驶的车辆质心侧偏角极限在±12°;在低附着路面上,极限约为±2°。质心侧偏角可由纵向行驶速度和横向行驶速度得到。
设计目标函数时,需要考虑多个系统变量,包含对控制量和控制增量以及状态量的控制,以保证车辆的跟踪精度和稳定性。同时加入松弛因子避免目标函数在一定计算时间内无法求解出最优解的情况发生。因此目标函数采用式(8):
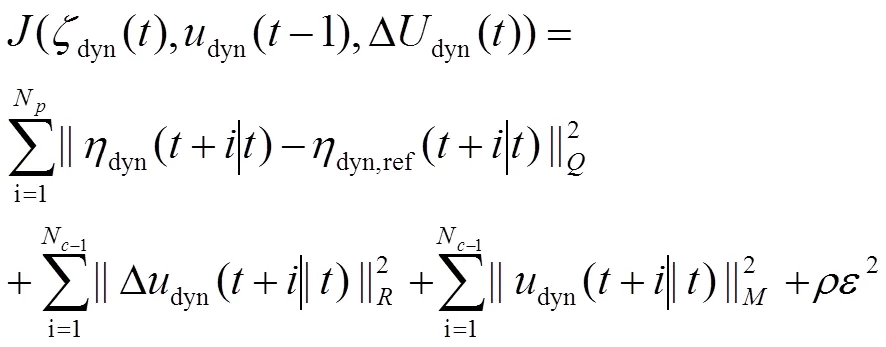
式中,N为预测时域参数,N为控制时域参数。、、、为系统权重系数。将以上目标函数转化为二次型形式可方便求解。
最终前轮转角约束自适应模型预测控制器的目标函数和约束条件的优化问题可由式(9)表示。
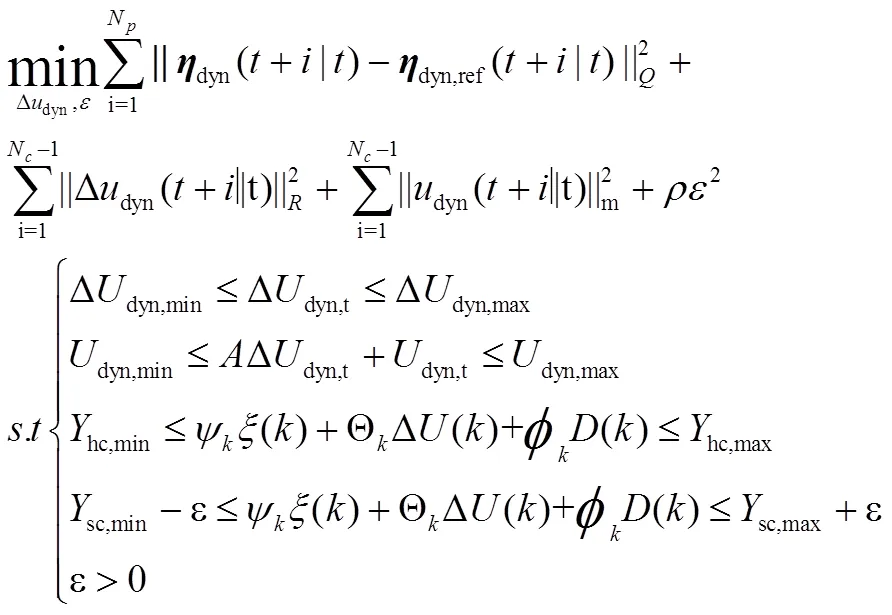
式中,△dyn,min△dyn,max为动力学控制增量的极限值,dyn,mindyn,max为动力学控制量的极限值。hc,minhc,max为硬约束输出极限值,sc,minsc,max为软约束输出极限值。
求解可以得到每个控制周期内的控制输入增量和松弛因子,如式(10)所示。

每个控制序列求解的第一个元素即前轮转角增量可以作为实际控制输入增量,如式(11)所示。

在下一时刻,预测时域和控制时域将会随着时间的推进而向前滚动优化,在每个控制周期内,都会求得一个最佳的前轮转角,如此循环往复,实现对参考路径的跟踪。至此实现了模型预测控制器的设计。
3 仿真结果分析
3.1 仿真平台搭建
在Carsim和MATLAB平台上联合仿真,在Carsim中设置被控车辆参数,在MATLAB中编写模型预测控制和求得前轮转角的S-function函数,联合仿真模型如图3所示。
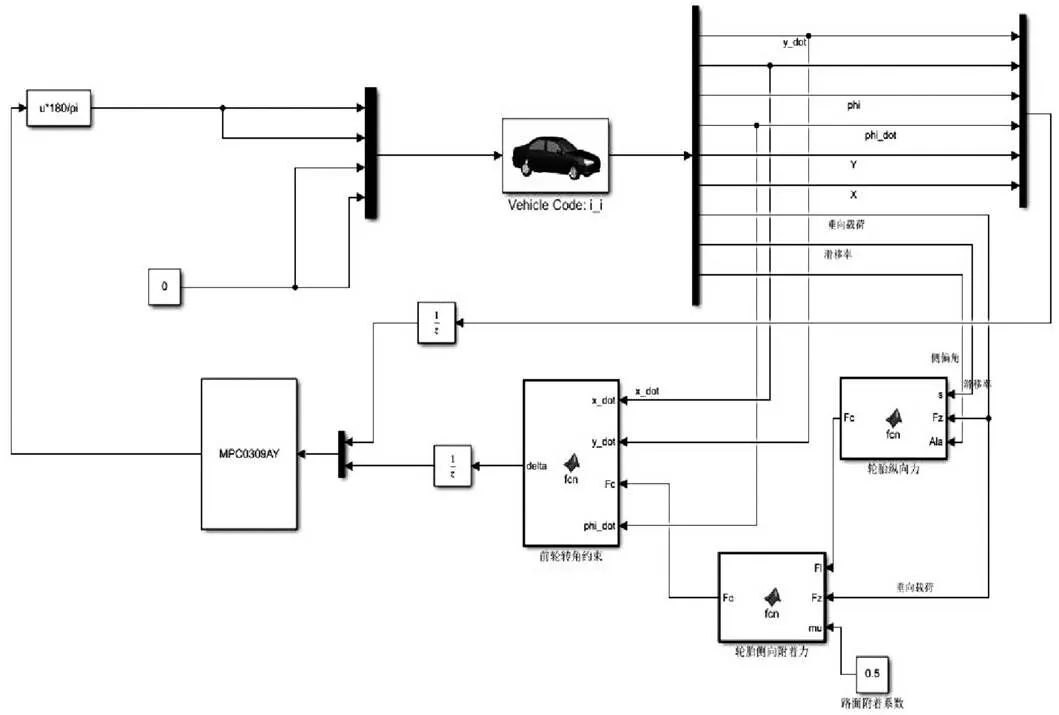
图3 联合仿真模型
被控车辆仿真参数设计见表1。
表1 车辆参数
参数名称数值参数名称数值 质量/kg1723前轮纵向侧偏刚度/N·rad-166 900 前轴距/m1.232后轮纵向侧偏刚度/N62 700 后轴距/m1.468前轮横向侧偏刚度/N·rad-166 900 前轮滑移率0.2后轮横向侧偏刚度/N62 700 后轮滑移率0.2转动惯量/kg·m-24 175
选取预测时域参数N=20,控制时域参数N=5。仿真路面附着系数分别为0.2、0.9。仿真车速分别为20 km/h、60 km/h。对固定的前轮转角约束为±3°、±7°和前轮转角自适应三种控制器在直线工况下进行仿真。
3.2 仿真结果分析
图4为路面附着系数为0.2,低速时的车辆跟踪直线参考路径的仿真结果。可知,在低附着条件时,较低车速情况下,前轮转角自适应约束的车辆的跟踪效果最好,且横摆角的幅值明显低于前轮转角约束为7°和3°的车辆,前轮转角约束自适应的车辆在车辆质心侧偏角和横摆角速度两方面,均表现最为优异。
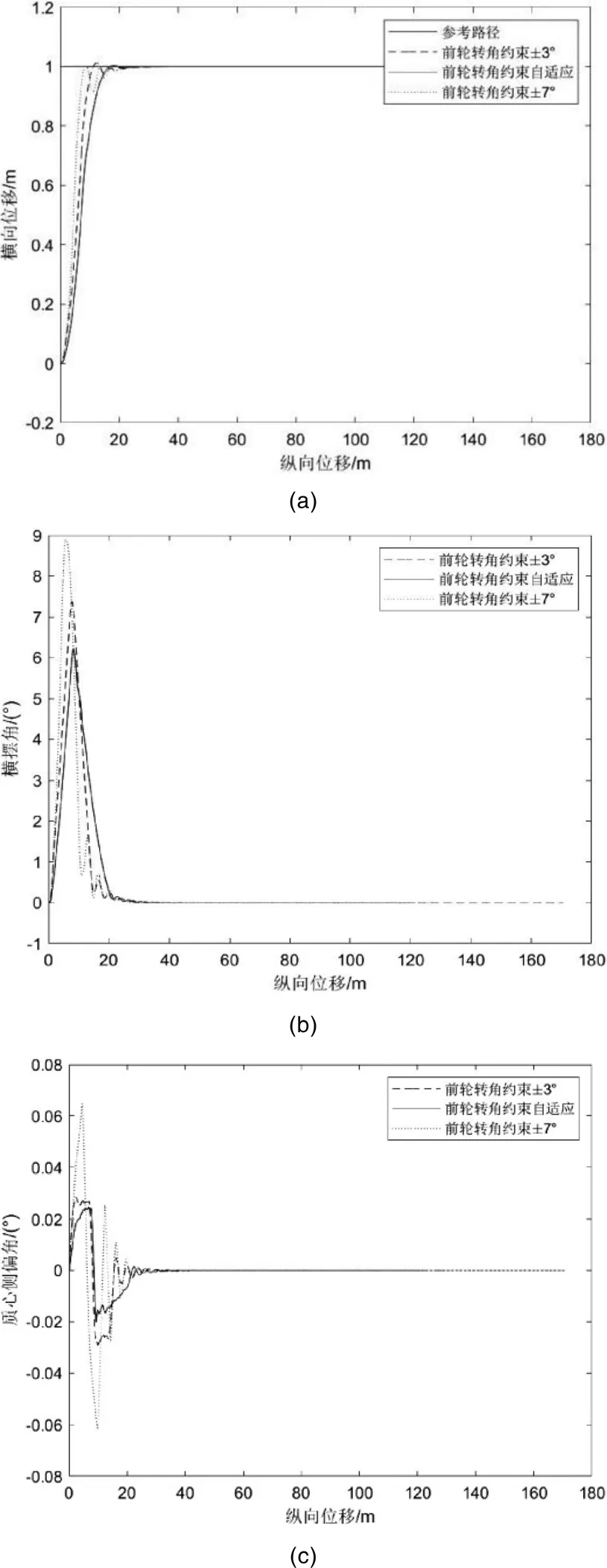
图5为在低路面附着条件和车辆高速情况下的跟踪结果。可以看出,前轮转角约束为7°和前轮转角约束为3°的车辆在跟踪直线路径时均发生了较明显的超调现象,且跟踪路径相似,原因是此时的侧向附着力所能提供的有效转角小于3°,前轮转角自适应的车辆跟踪上参考路径之后能够更快地进入稳态。前轮转角自适应的车辆的横摆角的幅值最小,且进入稳态的时间更短,质心侧偏角以及横摆角速度幅值均是最小进入稳态最快。

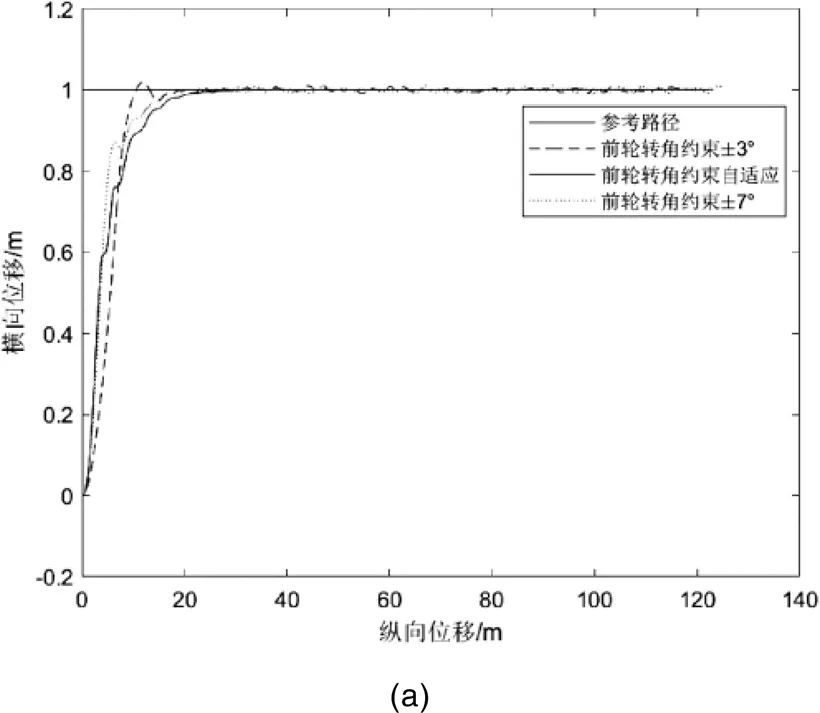

图6表示在高附着路面上,车辆低速行驶。前轮转角约束为7°的车辆和前轮转角自适应的车辆效果差异不大,总体上都优于前轮转角约束为3°的车辆。这是因为在低速高附着情况下,前轮转角约束较小的车辆无法充分发挥路面的附着能力,因此前轮转角约束为3°的车辆比前轮约束自适应以及前轮转角约束为7°的车辆更晚驶入参考路径。前轮转角约束为3°的车辆由于转角约束较小,所对应的横摆角明显低于前轮转角约束为7°的车辆。总体上,不同转角约束的车辆的稳定性相似。前轮转角约束为3°的车辆质心侧偏角明显低于前轮转角约束自适应和前轮转角约束为7°的车辆,但前轮转角约束自适应的车辆质心侧偏角能够进入稳态更快。
图7表示在良好路面附着系数和车辆高速行驶的情况下,前轮转角约束为7°的车辆的超调量最大。前轮转角自适应约束条件下的车辆相比前轮转角约束为7°和3°的车辆能够更平稳地进入参考路径中。前轮转角约束为7°和3°的车辆在驶入参考路径时,横摆角都有一定的震荡,前轮转角自适应约束的车辆震荡幅度最小且最快进入稳态。具有前轮转角约束自适应约束的车辆相比固定转角约束的车辆质心侧偏角和横摆角速度明显较小,车辆稳定性最优。
4 结论
为了实现车辆在行驶过程中充分利用路面附着系数并具有较好的行驶稳定性,文章提出了一种前轮转角约束自适应的模型预测控制方法,并进行了不同路面附着系数和不同车速下在直线工况下的仿真。仿真结果表明,在车速较高时,随着路面附着系数的增加,前轮转角自适应的车辆能够更快地跟踪上参考路径,并且稳定性较好。在车速较低时,随着路面附着系数的增加,前轮转角自适应的车辆和前轮转角约束分别为3°和7°的车辆相比路径跟踪能力和稳定性均较为优异。
[1] 晏欣炜,朱政泽,周奎,等.人工智能在汽车自动驾驶系统中的应用分析[J].湖北汽车工业学院学报,2018,32(01):40-46.
[2] Huang Y,Ding H,Zhang Y,et al.A motion planning and track- ing framework for autonomous vehicles based on artificial potential field elaborated resistance network (APFE-RN) approach[J].IEEE Transactions on Industrial Electronics, 2020,67(2):1376-1386.
[3] 彭之川,朱田,易慧斌.基于改进的Pure Pursuit智能客车轨迹跟踪算法研究[J].客车技术与研究,2019,41(05):21-24.
[4] 吴晟博,曹理想.无人驾驶车辆轨迹跟踪控制研究[J].汽车实用技术,2020(01):51-53.
[5] 谭宝成,王宾.无人驾驶车辆路径跟踪的增量式PID控制[J].西安工业大学学报,2016,36(12):996-1001.
[6] 高振海,管欣,李谦,等.驾驶员最优预瞄纵向加速度模型[J].汽车工程,2002(05):434-437.
[7] Tagne G,Talj R,Charara A.Design and Comparison of Robust Nonlinear Controllersfor the Lateral Dynamics of Intelligent Vehicles[J].IEEE Transactions on IntelligentTransportation Systems,2015.
[8] 陈慧岩,陈舒平,龚建伟.智能汽车横向控制方法研究综述[J].兵工学报,2017,38(6):1203-1214.
Research on Path Tracking of Adaptive Model Predictive Control Based on Front Wheel Angle Constraint
LI Chulin, TANG Xuemei, YANG Zhaoyang, ZHANG Yifu
( School of Automotive Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442002 )
In order to solve the problem that the smaller front wheel angle can not make full use of the road adhesion capacity and the larger front wheel angle makes the vehicle poor driving stability, an adaptive model prediction method with front wheel angle constraint is proposed. Firstly, the dynamic model of the vehicle is established, and then the longitudinal force of the tire is calculated, and finally the front wheel angle of the vehicle is obtained. The adaptive constraints of the state quantity of the vehicle and the front wheel angle are input to the model predictive controller, and the front wheel angle of the vehicle is output to realize the tracking of the reference path. The simulation results show that the vehicle with front wheel angle constraint adaptive model predictive control has better tracking ability and stability than the vehicle with fixed angle constraint on the platform of Carsim and MATLAB.
Adaptive front wheel corner constraint;Model predictive control;Path tracking
U467
A
1671-7988(2022)02-69-07
U467
A
1671-7988(2022)02-69-07
10.16638/j.cnki.1671-7988.2022.002.017
李楚琳,女,副教授,就职于湖北汽车工业学院,主要从事汽车轻量化、自动驾驶、智能优化等方面的研究。
汽车动力传动与电子控制湖北省重点实验室,汽车零部件技术湖北省协同创新项目(编号2015XTZX0419)资助。
猜你喜欢
小学生学习指导·爆笑校园(2019年6期)2019-09-10
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
小学阅读指南·低年级版(2017年1期)2017-03-13
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
计算机辅助工程(2012年5期)2012-11-21
祝您健康(1993年3期)1993-12-30