
基于卡尔曼滤波的机械振动WSNs时间抖动累积误差抑制方法
2022-02-23 10:26胡建川汤宝平
中国测试 2022年1期
胡建川,汤宝平,黄 艺,舒 帅
(重庆大学 机械传动国家重点实验室,重庆 400030)
0 引 言
无 线 传 感 器 网 络 ( wireless sensor networks,WSNs)因其部署的灵活性,能够有效弥补有线监测系统在机械振动监测领域的不足,如针对密封和旋转装备传动件的振动监测[1]。但随着机械振动无线传感器网络节点的增加,多跳节点的同步以及大量数据传输对WSNs提出了新的要求。
在机械振动监测领域,振动信号同步采集精度对数据的有效性和分析结果的好坏有着直接影响,如在结构健康监测系统中通常需要以较高的采样频率对多点振动信号进行同步采样,而节点间的同步误差会造成振动信号的相位偏移[2]。由于物理空间上的分散性,网络中各节点无法获得统一的时钟信号,只能通过维护本地时钟实现振动信号采样控制。由于生产工艺和环境因素影响,节点的采样时钟会出现偏移和漂移[3],使得节点即使进行采样同步触发控制,在后续的连续采样过程中也会出现采样间隔不一致,时间抖动累积误差大的问题。
目前,可采取硬件设计优化和软件算法补偿两种方式降低节点在连续采样过程中时间抖动对振动信号同步采集的影响[4]。硬件设计优化主要通过优化电路设计和采用具有温度补偿能力的晶振来构建具有更高频率稳定性的节点时钟,如温补晶振(temperature compensate crystal oscillator, TCXO)和恒温晶振(oven controlled crystal oscillator, OCXO),其能够有效抑制温度变化导致的节点采样时钟漂移,但该类型晶振存在功耗大、供电复杂、价格高等缺点,因此,目前大多数WSNs节点设计均使用普通晶振构建节点的时钟源[5]。通过软件算法补偿设计时钟同步协议是一种高效成本低的方式,但由于WSNs具有规模大、资源有限、环境复杂等特点,因此在传统网络中广泛应用的时间同步协议难以直接适用于WSNs,如网络时间同步协议(network time protocol, NTP)和全球定位系统[6](global position system, GPS)。目前针对WSNs的时钟同步算法,如 RBS 算法[7]、FTSP 算法[8]、TPSN 算法[9],受节点能量和信道带宽限制,具有明显的周期性和间歇性。针对机械振动WSNs同步采集问题,现有的同步算法主要通过周期性进行同步触发控制来抑制同步采集累积误差,如Billel Bengherbiad等[10]基于FPGA设计了一种机械振动WSNs采集节点,提出使用汇聚节点作为主节点在网络中同步触发数据采集的方法,该方法未考虑在多跳网络下的同步触发问题和节点间采样间隔不同导致的时间抖动误差累积问题。Gao等[11]针对飞机结构部件振动监测提出多跳时隙分段调度和多通道数据通信算法,通过计算sink节点与采集节点间信标的传输延迟进行同步补偿,从而周期性进行节点同步采集控制,该方法依赖于多跳时隙分段调度的可靠性和信标在网络中传输延迟的稳定性,未对同步周期内的采样频率进行修正。针对WSNs采集节点在连续高频采样过程中采样间隔不一致,时间抖动累积误差大的问题,鲜鸿宇等[12]分析晶振偏移造成的采样间隔时间抖动问题,提出基于信标的同步累积误差抑制方法,该方法未考虑多跳网络下同步累积误差问题。肖鑫等[13]分析多跳同步误差累积机理,校准信标在节点间的传输延迟和采集节点的晶振漂移,提出同步采集多跳累积误差抑制方法,该方法依赖于信标在网络中传输延迟的稳定。
本文针对机械振动监测采样频率高、数据量大、信号微弱等特点,设计了基于IEEE 802.11标准的机械振动WSNs采集节点。针对传统时钟同步算法同步消息量大、信道占用频繁的问题,提出基于簇树拓扑结构的父子链路轮询时钟同步方法。针对节点在连续高频采样过程中时间抖动累积误差大的问题,采用卡尔曼滤波估计节点时钟的频率偏移,根据时钟频率修正节点的实际采样间隔,从而抑制节点的时间抖动累积误差,实现节点的高精度同步采集。
1 节点设计及时间抖动误差分析
基于IEEE 802.15.4标准的无线通信协议(如Zigbee、LoRa、6LoWPAN等)具有低功耗、低成本等优势,在环境温湿度监测[14]、压力等缓变量监测、低频土木结构振动监测[15]等WSNs采集节点的设计中被广泛应用。然而,基于IEEE 802.15.4标准的无线通信协议存在传输速率较低的问题,最大传输速率仅为 25 0 Kb/s,而高精度机械振动监测在连续高频采样过程中有大量数据需要及时回传以便后续的数据分析,因此引入高速率传输的IEEE 802.11标准替换IEEE 802.15.4标准。
IEEE 802.11标准能够实现更高的数据传输速率,虽然其功耗较高,但配合低功耗管理技术更能够满足机械振动WSNs对传输性能的要求。本文基于IEEE 802.11标准进行了机械振动WSNs采集节点WSNG5-1设计,如图1所示。WSNG5-1采用支持 IEEE 802.11 b/g/n标准的 ESP32S2无线射频芯片作为主控芯片,其搭载Xtensa®32位LX7微处理器,采用 4 0 MHz外部晶振作为节点时钟源,传输速率高达150 Mb/s,设计使用噪声较低的IEPE传感器拾取振动信号和24 bit ADC进行模数转换,最高采样频率可达 5 1.2 kHz,能够满足机械振动信号采集需求。

图1 采集节点WSNG5-1系统框图
由于节点时钟的偏移,使得节点在连续高频采样过程中产生时间抖动误差累积问题。如图2所示,晶振频率偏移导致节点采样时钟产生偏移,使得节点的实际采样频率与设置的采样频率不同,节点间的采样间隔也不相等( Δt1,1≠ Δt2,1≠Δt3,1≠Δt4,1);环境变化导致节点晶振频率产生漂移,使得节点采样时钟产生漂移,从而导致节点在连续采样过程中的不同时刻采样间隔不同( Δt1,1≠ Δt1,n);节点采样时钟偏移和漂移导致的时间抖动会随着采样过程的进行逐渐累积,形成时间抖动累积误差( Δe2、 Δe3、Δe4)。

图2 时间抖动累积误差
若不进行节点采样间隔修正,在稳定环境下对节点采样时钟进行测量,实验结果如图3所示。即使进行节点采样同步触发,采样时钟的偏差也会导致同步误差随着时间推移而累积,以节点1的采样时钟为标准,由于时间抖动导致的平均同步误差累积率为1 . 559 μs/s ,最大同步误差累积率为 3 .17 μs/s,到9 0 s 时节点间采样时钟的最大同步误差为4 5 9.57 μs,这表明抑制时间抖动导致的同步累积误差对实现高精度机械振动WSNs同步采集有着重要意义。
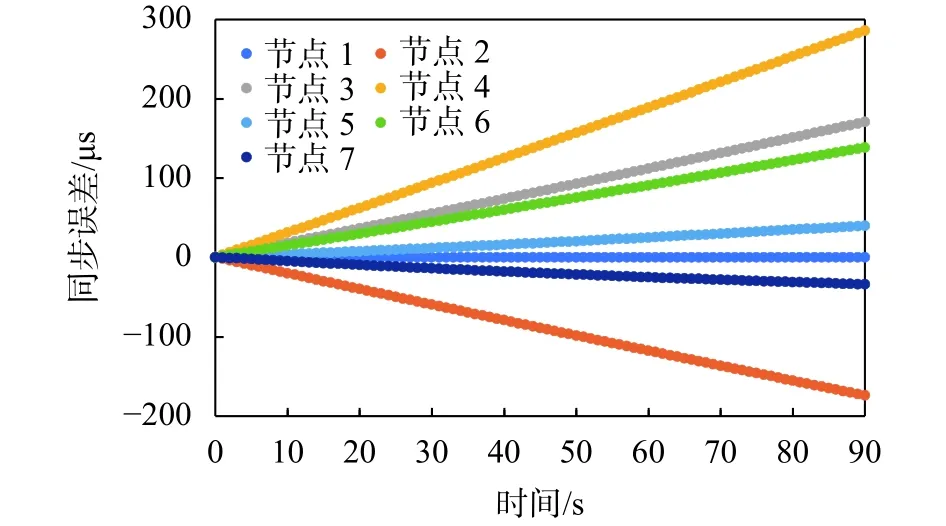
图3 节点间时间抖动误差累积
2 轮询时钟同步方法
2.1 采集节点时钟模型
采集节点通过对晶振产生的脉冲进行计数实现节点时钟控制,而节点启动时刻不同和晶振频率误差,都会使节点间的时钟不同步。定义t为标准时钟,Ti(t)表示节点i的本地时钟,若节点的本地时钟与标准时钟不存在偏差,那么 dTi(t)/dt=1,但实际上受生产工艺和工作环境的影响,不同节点的晶振间都存在频差和漂移。由此定义时钟的偏移率为:

令fi(t)=dTi(t)/dt,则节点i本地时钟Ti(t)可以表示为:

其中,ψi(t0)为节点i在t0时刻的时钟。
对式(2)进行泰勒级数展开得到:

式中:θi——节点i本地时钟与标准时钟t之间的相位偏移,是节点启动时刻不同所导致;
αi——时钟频率,由节点的晶振频率所决定;
γi——二次项系数,表示环境因素导致的时钟频率动态变化。
若二次项及以上的系数都为0,则节点i的时钟可以简化为:

如果节点所处的工作环境在短时间内变化较大且系统对时钟同步精度要求较高,则时间同步算法需要考虑二次项以上的系数,这样也相应地增加了计算开销。
2.2 父子链路轮询时钟同步方法
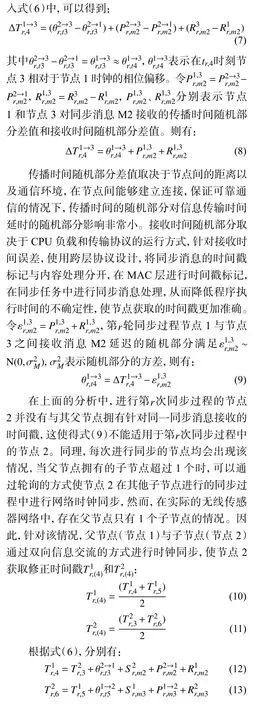
在无线传感器网络中,节点的时钟同步依赖于节点间的信息交流,而无线传感器网络中的信息交流延迟具有不确定性,会降低节点间时钟同步精度。如图4所示,同步消息的传输延迟时间可以划分为发送时间、访问时间、传输时间、传播时间、验收时间和接收时间。其中,发送时间和接收时间是同步消息在节点的信息处理程序与网络接口间传输的时间,取决于节点的处理器性能、系统开销和当前处理器负载,对同步消息传输延迟影响较大;访问时间是信息到达MAC层后,同步消息等待直到它可以访问信道的时间,取决于使用的网络协议和当前信道负载,对同步消息传输延迟影响较大;传输时间和验收时间分别是同步消息被逐位发送和接收的时间,通常可以根据同步消息的长度进行估计,对同步消息传输延迟影响较小;传播时间是同步消息通过无线链路从发送方到接收方所花费的实际时间,取决于节点间的物理距离和传播媒介,对同步消息传输延迟影响较小。

图4 无线链路消息传输延迟分解
分析同步消息在无线链路中的传输延迟可知,其最大影响因素是发送方的发送延迟和访问延迟,而且具有很强的不确定性,特别是随着网络规模的增大,信道竞争加剧,传输延迟的随机性也随之增加。因此,为了降低传感器网络中不同节点间接收信息的不确定性,提出基于簇树拓扑结构的父子链路轮询时钟同步方法。图5是网络单跳同步执行过程,其中节点1是节点2、节点3、节点4共同的父节点,也是整个网络时钟的基准源( β1=1,α1=0),负责调度网络时钟同步,在同一网络簇中,所有节点均能够监听到任何两者之间的同步消息。具体同步过程如下:
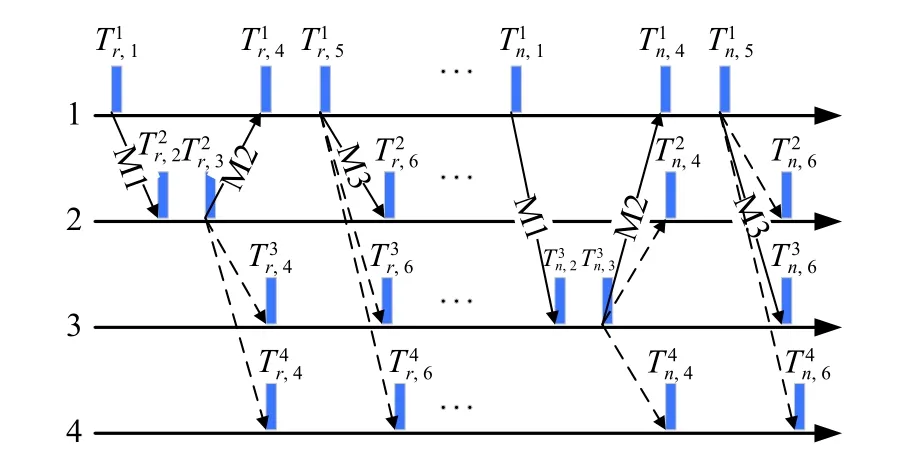
图5 单跳同步过程


大型机械装备的健康监测,单跳已经不能够满足监测需求,常常需要建立多跳网络,因此,网络时钟同步算法必须考虑多跳网络情况,使其能够有效应对节点链路故障以及动态网络拓扑。本文的网络时钟同步算法采用簇树拓扑结构,如图6所示,根据采集节点在网络中所处位置以及是否拥有子节点将采集节点分为根节点、路由节点和叶子节点3种。根节点(节点1)处于网络最顶层,是无线传感器网络与外部网络的接口,作为无线传感器网络的时钟基准源;路由节点(节点2、节点3)拥有至少1个子节点;叶子节点(节点4、节点5、节点6、节点7)处于网络的最外层,不拥有子节点。

图6 基于IEEE 802.11的簇树拓扑结构
进行网络时钟同步时,所有的父节点根据拥有的子节点数量进行时钟同步调度,在如图6所示的簇树拓扑结构中,节点1和节点2使用多子节点同步方法分别与子节点进行时钟同步,节点3使用单一子节点同步方法调度节点7与其进行时钟同步,最终实现整个网络的时钟同步。采用父子链路轮询的时钟同步方法,相对于传统时钟同步算法,在网络规模较大、父节点拥有的子节点数目较多时可以有效降低时钟同步对信道资源的占用和节点能量的消耗。
3 基于卡尔曼滤波的时间抖动抑制方法
3.1 基于卡尔曼滤波的相位偏移和频率偏移估计


3.2 时间抖动累积误差抑制

4 性能验证与分析
为验证本文提出的基于卡尔曼滤波的时间抖动累积误差抑制方法的有效性,以7个设计的机械振动采集节点构建如图6所示的簇树拓扑进行振动信号采集实验,节点1作为根节点,连接到笔记本自带的无线网卡,从而使无线传感器网络与上位机建立连接。实验采样频率设置为 5 1.2 kHz,使用逻辑分析仪以1 0 0 MHz的采样频率记录节点ADC时钟信号,实验布置现场如图7所示。
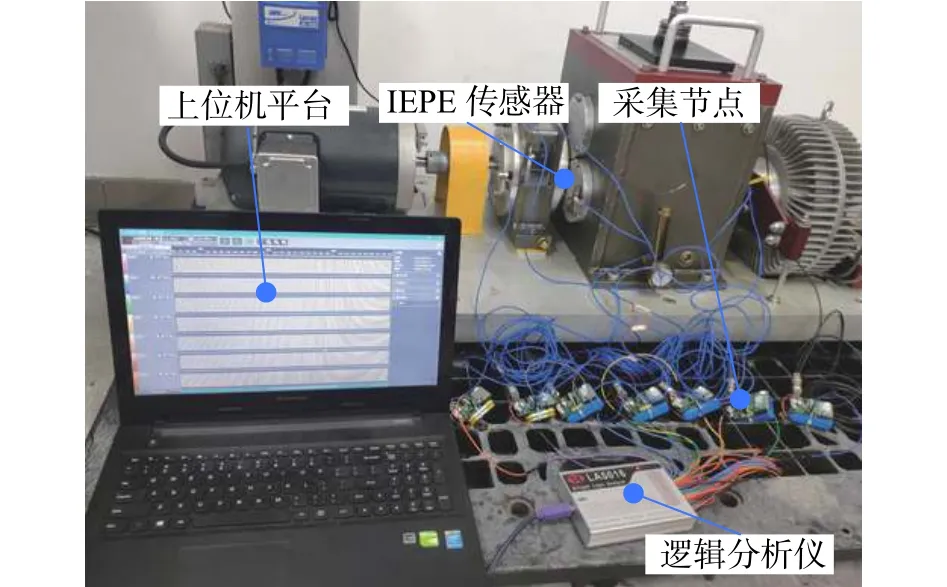
图7 同步采集精度测试
节点1作为无线传感器网络的时钟基准,其他节点相对于节点1的采样时钟偏移为时间抖动累积误差。逻辑分析仪记录的ADC时钟信号如图8所示,节点间最大同步误差出现在节点6与节点7之间,为1 . 58 μs ,相对于51.2 kHz的采样率,能够满足机械振动信号同步采集需求。统计连续高频采样过程的时间抖动误差累积如图9所示,在长达 90s的振动信号采集过程中,节点的时间抖动累积误差始终被控制在 ± 1 μs以内,平均时间抖动累积误差为0.35 μs。相对于不进行时间抖动累积误差抑制时的最大同步误差 4 59.57 μs,平均时间抖动累积误差140.28 μs,该方法能够有效抑制节点时间抖动。
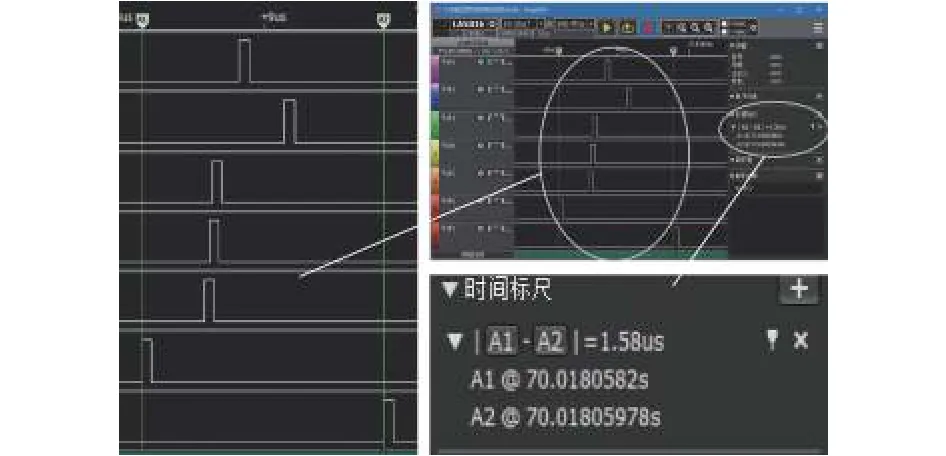
图8 采样间隔修正后的最大同步累积误差
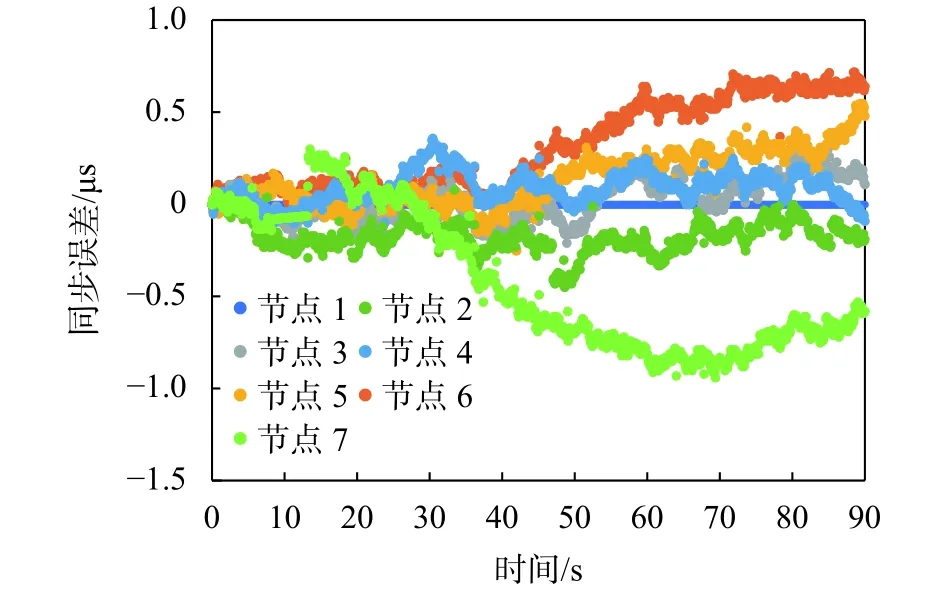
图9 采样间隔修正后的时间抖动误差累积
如表1所示,与文献[7-9]中的同步算法的同步精度相比,本文提出的同步方法具有更高的同步精度。相对于文献[10]提出的使用汇聚节点进行同步采集触发方法,本文提出的同步方法的同步精度更低,其平均同步误差为 4 32.42 ns,最大同步为800 ns,因为该方法仅适用于单跳网络下的时钟同步。相对于文献[11]提出的延时补偿同步方法,本文提出的同步方法具有更高的同步精度,其最大同步误差为 2 .43 μs,因为本文提出的同步方法对同步周期内的采样间隔进行了修正,抑制了时间抖动累积误差,能够实现更高的同步精度。

表1 各种同步算法同步精度
5 结束语
为解决机械振动WSNs连续高频采样存在的时间抖动累积误差大问题,本文首先根据机械振动监测的特点,设计了基于IEEE 802.11标准的机械振动采集节点;然后分析节点在进行连续高频采样时产生时间抖动误差累积的原因,提出了一种父子链路轮询时钟同步方法,采用卡尔曼滤波估计节点时钟的频率偏移;最后采集节点在进行连续高频采样时,根据节点时钟的频率偏移修正节点的采样频率,降低节点采样间隔差异,抑制时间抖动累积误差。实验采用6个节点组建3跳网络以 5 1.2 kHz的采样率进行连续高频采样,结果表明,在连续采样90 s 后平均同步累积误差为 0. 35 μs,节点间最大同步误差为1 . 58 μs,该方法能够有效抑制机械振动WSNs时间抖动累积误差,提高振动信号的同步采集精度。
猜你喜欢
昆明医科大学学报(2022年3期)2022-04-19
中国药学药品知识仓库(2022年1期)2022-03-23
数学小灵通·3-4年级(2021年9期)2021-10-12
辽宁科技学院学报(2021年3期)2021-07-01
科学与信息化(2021年4期)2021-02-26
小学生学习指导(低年级)(2020年10期)2020-11-09
电子技术与软件工程(2017年14期)2017-09-08
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
科技传播(2015年19期)2015-03-25
