
MEMS传感器输电线路舞动轨迹监测
2022-02-23 10:26陶亚光常帅帅钱泽利吕中宾
中国测试 2022年1期
张 博,陶亚光,常帅帅,钱泽利,吕中宾
(1. 国网河南省电力公司电力科学研究院 河南省电力线路舞动防治技术重点实验室,河南 郑州 450052;2. 哈尔滨工业大学仪器科学与工程学院,黑龙江 哈尔滨 150001)
0 引 言
随着我国输电网建设规模迅速扩大,输电线路的舞动事故频繁发生,已引起金具损坏、导线折断等严重事故,对输电安全造成了巨大危害[1]。输电线路舞动是偏心覆冰导线在风激励下产生的一种低频、大振幅自激振动现象[2],为了掌控线路舞动变化状态,最为直接的方式就是监测舞动轨迹以提供舞动预警,为舞动防治、防舞装置研究等提供数据支持[3]。
国内外目前在输电线路舞动监测方面主要采用基于光纤传感器、图像处理、差分GPS、加速度传感器和多轴惯性传感器的技术方法[4]。然而光纤传感器技术具有成本高、安装困难、信号传输复杂等特点;图像处理技术以及差分GPS技术均容易受到恶劣气候影响,影响监测效果[5]。随着微传感器智能化、低成本的发展,基于加速度以及多轴惯性传感器的监测技术越来越受到业内关注。
本文即设计了基于MEMS六轴惯性传感器监测技术的舞动轨迹监测算法,算法给出舞动轨迹监测一般解算流程,以传感器敏感舞动的角速度、加速度信息来解算线路舞动的空间姿态和幅值,根据二者变化监测舞动轨迹,解决了当前仅用三轴加速度计所存在的线路空间扭转所导致监测不准确问题。姿态解算时为有效抑制传感器中陀螺仪误差随时间累积,算法采用融合Mahony滤波的四元数姿态解算,可进一步提高舞动姿态解算精度[6]。相比于传统的轨迹监测算法,本文提出了线路起舞及舞止的判别方法、监测设备无法引入外界磁信息确定初始姿态角方法,在算法准确性、完备性方面有所改进。
1 舞动轨迹监测装置组成
基于MEMS六轴惯性传感器技术的输电线路舞动轨迹监测装置主要由线上测量系统和舞动监测塔上终端构成,装置构成图如图1所示。
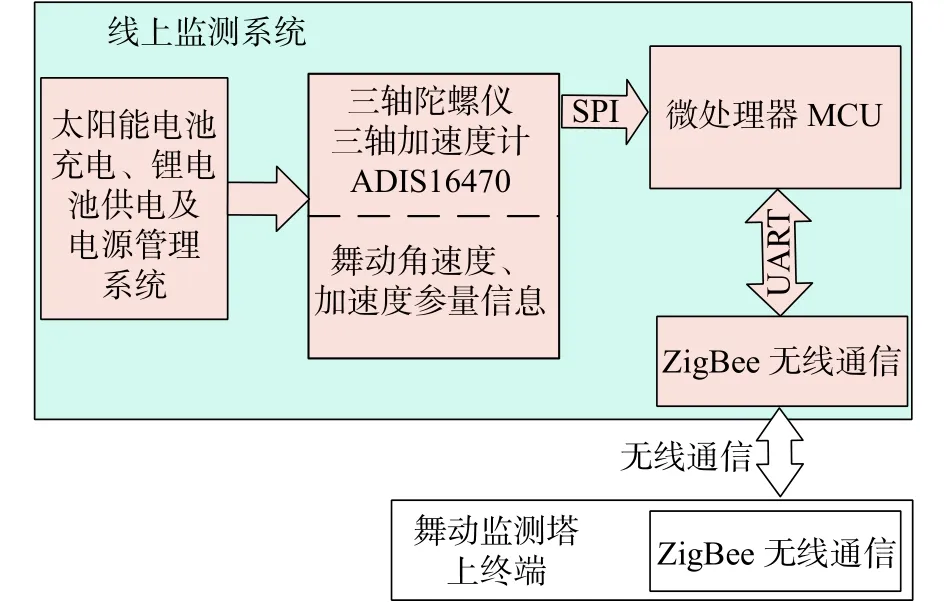
图1 装置总体构成框图
装置固连在输电线路上,舞动轨迹监测算法即应用于此装置,由图1可知,线上测量系统由MEMS惯性测量单元MIMU(三轴陀螺仪、加速度计)、微处理器MCU、无线通信模块、供电电源共同组成。其中MEMS传感器为敏感舞动器件,系统MCU选择STM32L型号低功耗系列,而输电线路舞动轨迹监测算法正是植入此MCU,以实现高精度、低功耗的舞动轨迹的监测。
2 舞动轨迹监测算法设计
2.1 算法设计原理
算法主要解算输电线路舞动姿态和位移以监测线路舞动轨迹,舞动姿态解算时,监测系统若仅采用MEMS六轴传感器中陀螺仪测得载体的运动角速率,由于陀螺漂移等因素随着使用时间的推移,姿态偏差会越来越大[7],此时可通过互补滤波算法融合加速度数据修正陀螺仪的漂移,进而解算出误差较小的舞动姿态角(航向角、俯仰角和滚动角)[8]。舞动姿态角已知后可将加速度计数据转移到空间统一坐标系下,然后通过积分解算得到舞动位移。基于以上的算法设计原理图如图2所示。
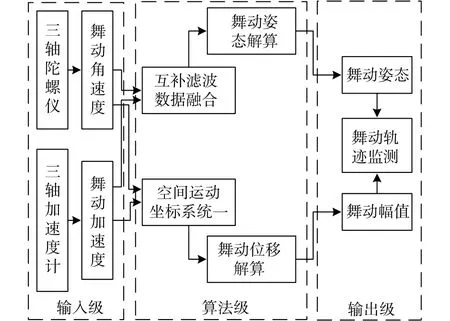
图2 算法设计原理图
对于本文所使用互补滤波算法,是在经典互补滤波器基础上引入积分环节所构成的Mahony滤波器。对于此滤波器的原理性框图见图3。
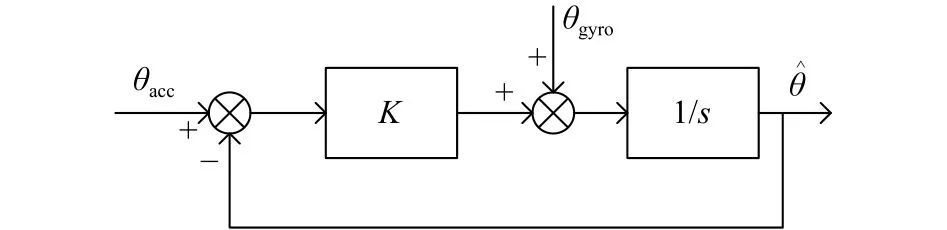
图3 Mahony滤波器
Mahony滤波器能够很好地消除惯性测量集合中组成元素的相应频率阈误差,将各传感器数据较好融合,获得估计值偏差较小的姿态角输出。
2.2 舞动轨迹监测解算流程
舞动轨迹监测系统要完成对线路舞动轨迹的监测,其解算算法设计需主要涉及舞动数据采集、数据预处理、系统的初始姿态角确定、线路舞动的起舞与舞动终止的判定以及线路的姿态、位移等参数的解算。主要的算法的流程如图4所示。
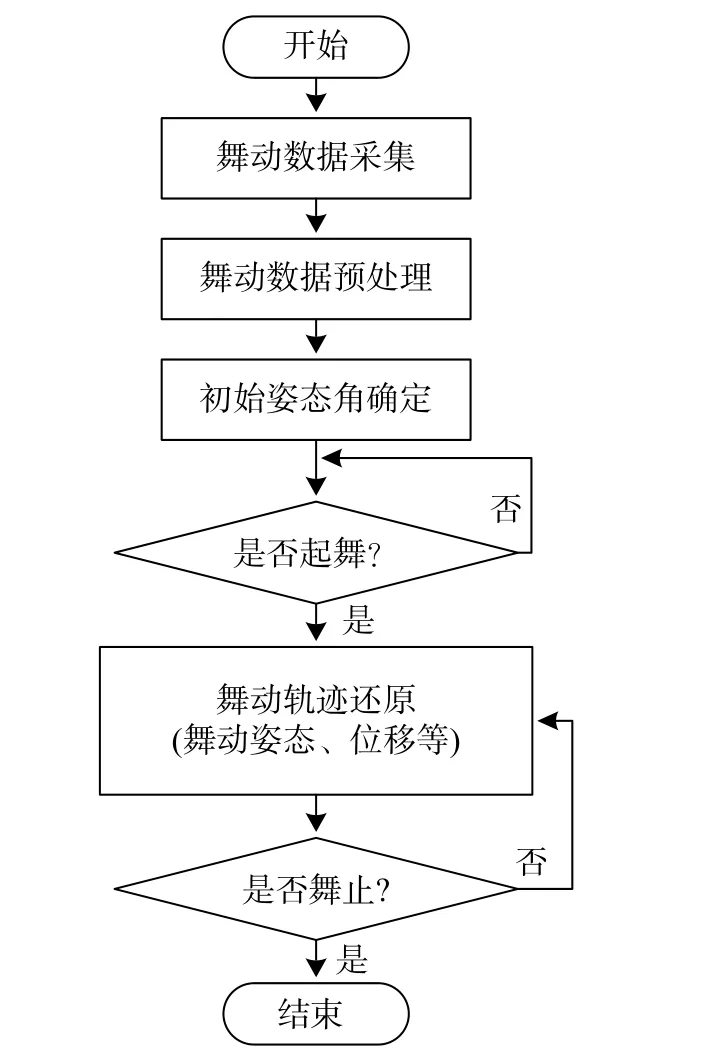
图4 主要算法流程图
2.2.1 数据预处理
1)常值偏差消除
MEMS六轴传感器在正常工作时,由于器件可能存在零位偏置误差[9]。去除常值漂移,本文采用去均值的方法,即首先计算N个采样点数据的平均值:
然后用后续采集数据的值减去式(1)所计算的平均值

2)数据平滑滤波
MEMS六轴传感器所输出原始数据由于存在周期性或非周期性随机干扰噪声,这些噪声将引起原始信号产生毛刺、尖峰等,使得信号曲线不再光滑。因此本文对传感器输出数据进行五点三次平滑法处理,消除信号的随机干扰噪声特别是高频干扰。五点三次数据平滑公式见下式:
3)数据去除趋势项
器件低频性能的不稳定、零点的漂移[10]、采样时间选取不当等因素将使得所采集信号数据相比于标准基线发生偏离,即信号产生趋势项[11]。趋势项一般存在信号的低频部分,所以其周期一般比采样时间长。趋势项影响信号的准确性、降低信号信噪比,特别是加速度信号进行积分时趋势项可能使得结果准确性大大降低[12]。综上,本文将采用最小二乘原理[13]对数据信号进行趋势项的去除。
假设采样点数据列xi(i=1,2,3, ···,N)为时间间隔一致的数据,用m阶多项式对信号数据列进行拟合,拟合多项式如下式所示:


对于P取得极小值,则需有

则求解上式,确定拟合系数d0,d1,···,dm;此时拟合多项式(4)便得以确定。
用采样数据列各值对应减去数据列拟合多项式的函数值

式(7)的处理即使得存在于信号采样数据中的趋势项得以剔除。
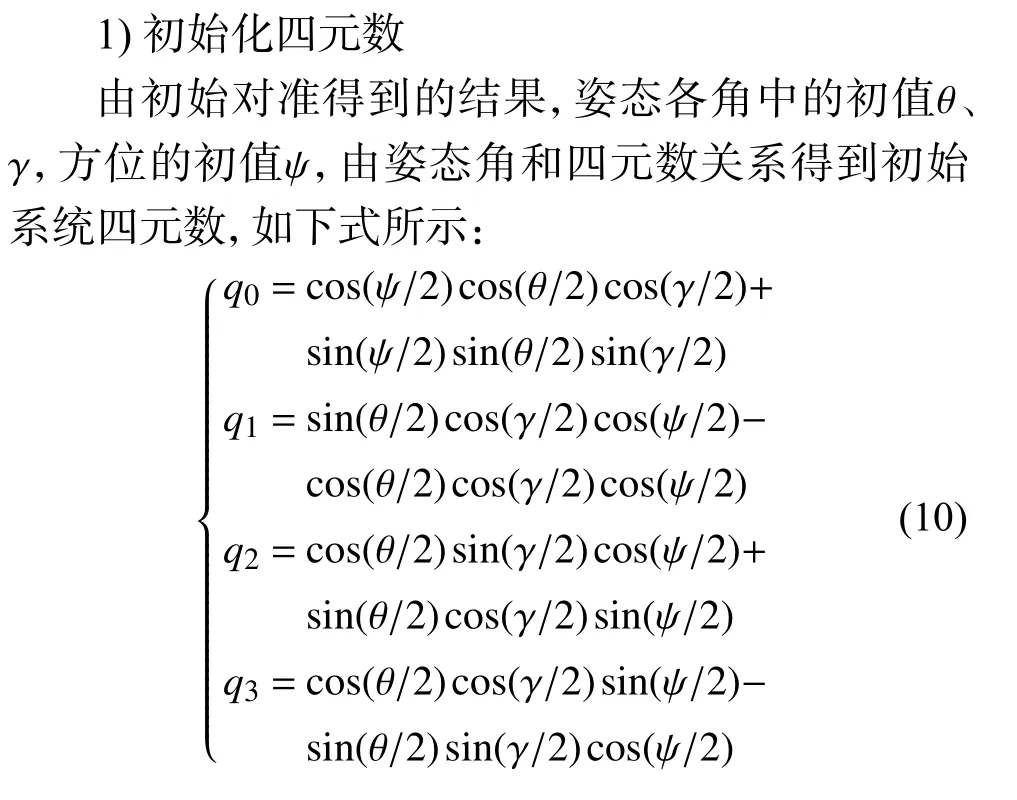
2.2.2 舞动初始姿态角确定
MEMS IMU 由于精度不是特别高,通常难以应用传统初始对准方法获得初始的姿态角。对于MEMS IMU获取初始姿态角的常用方法为通过磁力计等传感器引入地磁信息,进而获得系统的初始方位角。但是由于舞动轨迹监测装置直接与输电线路固连,工作环境存在强烈磁场干扰,磁力计等传感器无法正常提供所需地磁信息[14],所以为了获得轨迹监测系统初始姿态角,需要调整初始姿态角确定方案。本文提出解决方案为建立输电线上的导航坐标系,如图5所示。
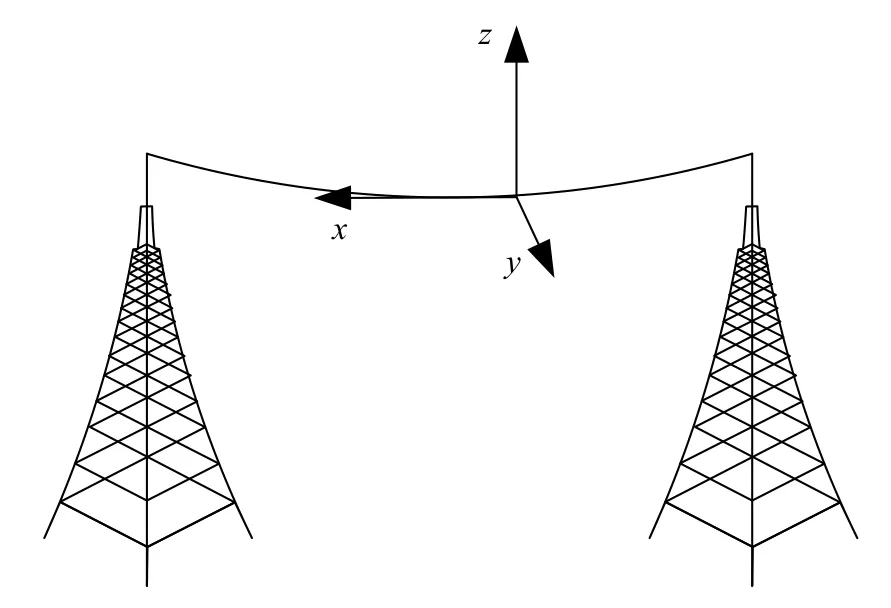
图5 线上导航坐标系示意图
线上导航坐标系以线路在静止状态下的走向为x轴;z轴方向即与x轴所在的水平平面垂直的方向;进而y轴方向由右手定则即可判断得出。以此坐标系为导航坐标系,则可以确定舞动轨迹监测系统在理想安装条件下在初始位置时的航向角为0。
由加速度计确定横滚、俯仰角初值
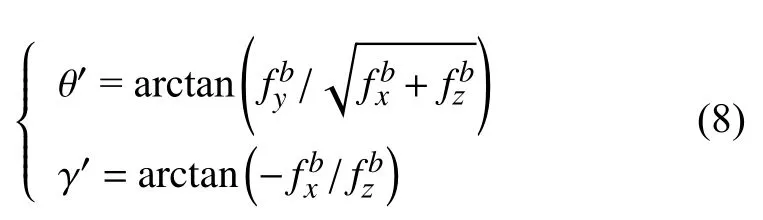
显然航向角初值则为0,所以航向角初值确定为

在此基础上即可对姿态进行更新。
2.2.3 舞动起舞与止舞的判定
为便于分析计算,按照一般近似圆周运动特点,当输电线路在舞动时,无论在圆周运动的哪一阶段,相应的3个轴的加速度计至少有一个轴的加速度会有显著的变化,结合输电线路舞动频率一般介于0.1~0.3 Hz,舞动幅值介于 1~2 m,则线路以 0.1 Hz的频率做半径为1 m圆周运动时运动平均加速度最小,经计算为0.01g。
加速度计各轴所输出测量数据滤除重力加速度后,方为相应运动加速度,所以当其加速度各轴矢量和幅值大于0.01g即可判定舞动开始;当所存余加速度均接近于0,则可判定导线舞动停止。
2.2.4 舞动姿态解算
融合Mahony滤波的四元数姿态解算的原理图如图6所示。图中,q为四元数,vb和ab分别为载体系b下的速度和加速度。
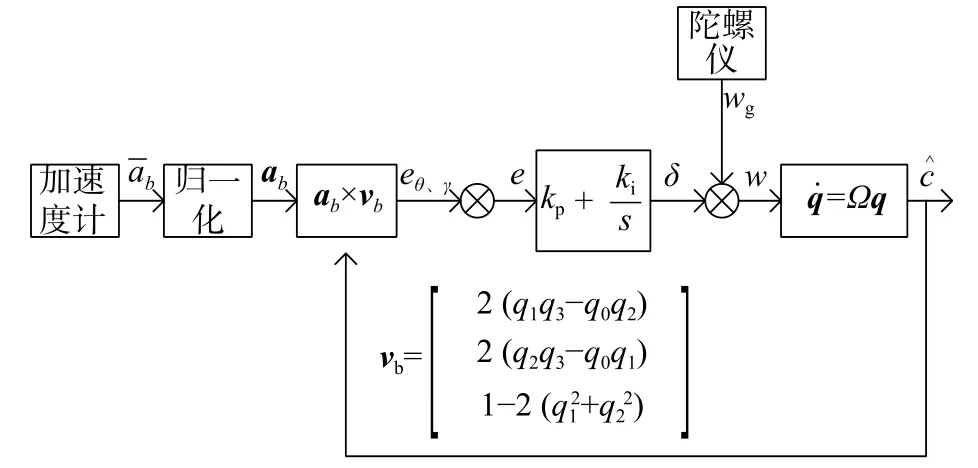
图6 融合Mahony滤波四元数姿态解算原理图
算法具体实现的过程如下:

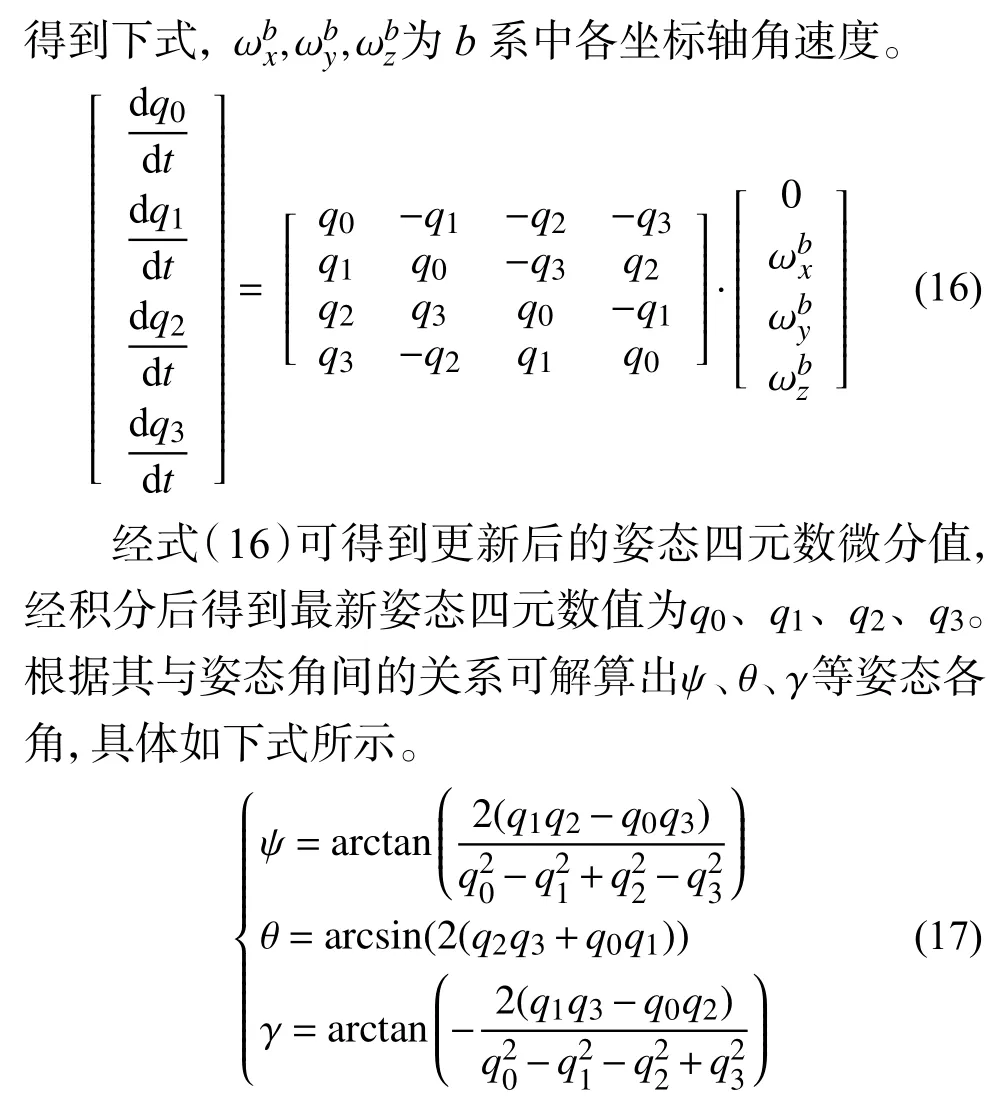
2.2.5 舞动幅值解算
轨迹监测装置在实际工作过程中,重力加速度在各轴上会产生分量,影响舞动的幅值的解算,因此需要根据已解算出的输电线路空间的姿态角,经坐标变换来滤除加速度计各轴重力所产生分量。而后积分解算出导线的舞动幅值等参数。积分运算的原理如图7所示。
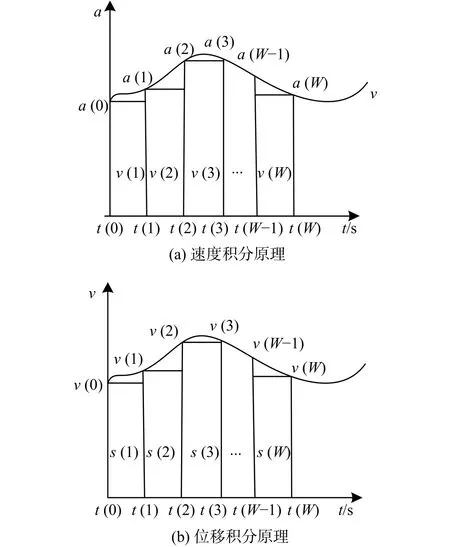
图7 速度、位移时域下的积分原理
曲线积分结果近似为微小梯形面积之和。假设将 [t0,tW]时间区间W等分,则区间 [t0,tW]中将有t0~tW若干个时间点,过每一个时间点依次做直线使之垂直于x轴,将曲边形状分解为W个微小的窄边曲边梯形,则v(W−1)、v(W)分别为每个微小曲边梯形为上下底,Δt为微小曲边梯形的高,可以得出速度的积分位移为:

积分处理后可得到输电线路舞动的位移,结合系统的姿态角输出,即可监测输电线缆的舞动的轨迹。
3 实验结果分析
本文在实验室环境下对系统进行了姿态角解算准确度测试,以及单维和多维对轨迹运动监测情况的测试,并对结果进行分析。
首先姿态角解算测试,将轨迹监测装置放置于转台上,给转台固定的旋转角度,分别对传感器绕x/y/z3个轴向旋转分别进行测试,转动转台20°、40°、60°、80°、90°,重复测试后对结果求值,测试结果如表1所示。

表1 实验结果
根据测试结果,传感器的俯仰和横滚两个姿态的角度误差在0.5°之内,航向角的角度误差在1°之内,姿态解算精度较高,从而证明了基于Mahony滤波的姿态解算算法的准确性。
舞动轨迹监测装置单维轨迹监测实验:将系统置于水平平面上,沿着导轨正向运动10 cm,反向运动 17 cm,15 s内重复 3 次,在此过程中,理论上只有X轴参与运动,采集原始数据并对数据进行处理得出计算结果画出相关的图像,首先对原始采样数据进行预处理,图8显示了加速度原始数据和去除趋势项后的处理结果和平滑后的数据对比图像。

图8 原始信号和处理后的信号
数据预处理后原始数据波动程度及误差明显减小,对其进行积分运算,则可显示时域位移曲线如图9所示。通过观察解算位移曲线可以发现,轨迹位移解算结果符合实际运动位移,验证了位移解算算法准确性。
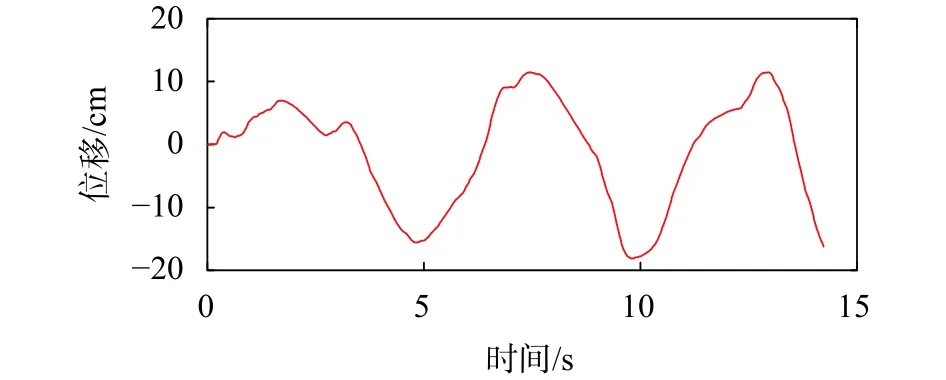
图9 位移解算曲线
在空间三维坐标系下将轨迹监测装置固定在悬臂上距转台中心35 cm,控制转台9 s内转动一周并采集惯性传感器数据,运动轨迹进行监测如图10所示。
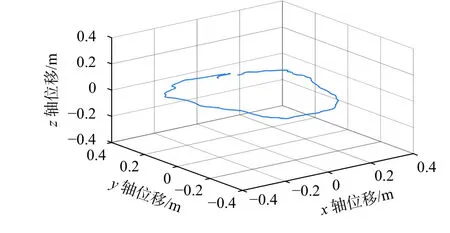
图10 轨迹监测曲线图
轨迹监测曲线整体上反映了实际的轨迹信息。整个圆周运动的测量共400个采样点,理论上每个采样点的处的位移均为35 cm,则解算各点的位移偏差如图11所示。
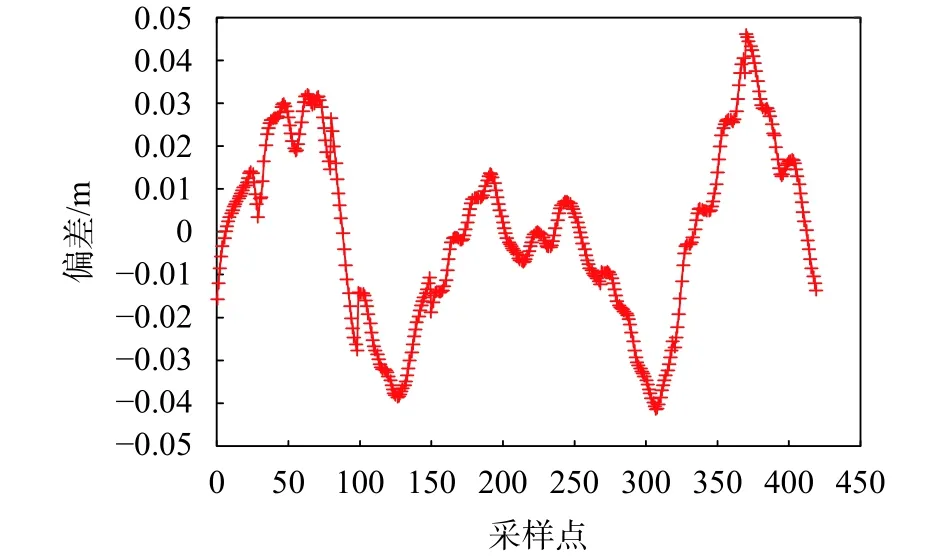
图11 采样点轨迹监测位移偏差图
由偏差图可知,所监测轨迹的偏差均值0.0176 m即1.76 cm。同时后续又进行的数次实验也均达到偏差较小地监测运动轨迹的标准。
4 结束语
本文针对所开发输电线路舞动轨迹监测装置,详细给出了舞动轨迹监测算法的设计。算法中提出了判断舞动起舞及舞止的方法,给出了针对MEMS惯性传感器精度低同时满足本项目需求的初始对准方法,同时算法将四元数姿态解算方法与Mahony滤波器融合,获得了更高精度的舞动姿态解算。最终在实验室环境下利用转台转动模拟输电线路舞动,对舞动轨迹监测算法进行测试,舞动姿态测试结果验证了算法对舞动姿态解算的可行性、准确性,舞动轨迹监测一维及多维的测试结果表明输电线路舞动轨迹监测系统对舞动轨迹监测精度较高。该舞动轨迹监测装置满足国家电网公司企业标准关于《输电线路导线舞动监测装置技术规范》中综合误差小于10%的要求,能够完成舞动监测与轨迹监测要求。
猜你喜欢
当代水产(2022年6期)2022-06-29
学生天地(2020年3期)2020-08-25
金桥(2018年12期)2019-01-29
汽车观察(2018年12期)2018-12-26
汽车观察(2018年9期)2018-10-23
学苑创造·A版(2018年9期)2018-10-22
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
Coco薇(2016年8期)2016-10-09
诗选刊(2015年4期)2015-10-26
