
基于视觉和最大长度序列的旋转角度测量系统
2022-02-23 10:26吴常铖杨德华曹青青宋天赐
中国测试 2022年1期
吴常铖,杨德华,曹青青,费 飞,宋天赐
(1. 东南大学仪器科学与工程学院,江苏 南京 210096; 2. 南京航空航天大学自动化学院,江苏 南京 211106;3. 南京工业职业技术大学航空工程学院,江苏 南京 210023)
0 引 言
微小位移的检测是精密仪器系统的重要组成部分,高精度的微小位移的检测是精密系统可靠、稳定运行的重要保证。在角位移测量中,编码器是最常用的传感器之一,如伺服电机中通常安装有增量式光电/霍尔编码器。为了实现绝对角位移测量,文献[1]提出了基于伪随机数的光电轴角编码器。除了编码器外,目前机器视觉[2-4]、惯性传感器[5-8]等也大量应用于各类角度测量系统中。另外,也有学者将光纤传感器、扭力弹簧、接近开关等用于角位移的测量。如文献[9]基于Sagnac干涉仪设计了一种旋转角度测量系统,测量误差优于1%。文献[10]提出了一种基于扭力弹簧和应变片的关节旋转角度测量方法。文献[11]采用接近开关配合PLC构建了马达旋转角度及速测测量系统。
现有众多角位移测量方法可以分为接触式测量和非接触式测量。其中,非接触式测量方法可在不干扰旋转体运动的情况下实现角度测量,这类方法在精密机械的智能化改造中有重要的应用,它可以在不拆卸机构和添加机械连接件的情况下实现转角的精密测量。非接触式角度测量中,视觉是最常见的一种方法。文献[12]提出一种基于SIFT特征计算物体旋转角度测量方法,图像畸变不大时,该方法的测量误差在3°以内。文献[13]提出了基于ORB的快速角度测量方法,能够对不同尺度、旋转、遮挡的目标进行角度测量,误差在0. 3°左右。文献[14]提出了一种改进的LSD方法并将其用于旋转角度检测,该方法通过取消图像缩放、增加梯度大小阈值和减少对齐点密度阈值来降低图像检测中非连续线段和错误线段的发生概率。
上述现有基于视觉的旋转角度检测方法,虽然都能较好地实现物体角位移的测量,但是都需要在被测对象的旋转轴方向上放置摄像头来获取图像信息。因此,这些方法不适用于串联杆件或两端连有其他部件且无法在其旋转轴线上布设摄像头的杆件的旋转角度测量。本文针对这一问题,提出了一种基于视觉和最大长度序列的角度测量方法并进行了相关实验测试。该方法通过在柱状旋转体表面粘贴视觉靶标,利用摄像头从侧面获取旋转体周向的图像信息来实现角位移的测量。
1 基于最大长度序列的位移测量原理
1.1 最大长度序列靶标
最大长度序列又叫伪随机序列、伪噪声码或伪随机码,它是由带线性反馈的移存器产生的周期最长的一种序列。对于n位二进制伪随机数的最大长度序列,其总长为MLS=2n–1位[15-16]。由于序列中,任意n个连续的二进制位组成的编码是唯一的,因此该序列可用于定位。
本文构造出一个n=7最大长度序列,并根据序列设计靶标如图1所示。设计的靶标以黑色为背景,长短不同的两种白色条纹分别代表“1”和“0”,白色条纹的宽度为2 mm,相邻的两个白色条纹间隔2 mm。

图1 靶标
1.2 位移检测
如图2所示,将靶标粘贴在被测平台上,同时在被测平台上方放置摄像头。平台移动过程中,摄像头拍摄靶标照片,对图像进行处理即可得到平台的位移信息。

图2 直线位移测量平台
假设获取到的靶标图像为M×N的图像,则图像的像素值矩阵可表示为:

其中f(i,j)代表图中第i行第j列像素点的像素值。
对图像进行二值化处理后,采用下式计算图像中每列像素点的像素值均值,即可将二维的图像转换为一维的曲线:

利用列像素均值曲线识别出图像中的白色条码,并判别白色条码在靶标中的位置,即可得到被测对象的绝对位置。图3分别为靶标二值化图像及其对应的列像素均值曲线。
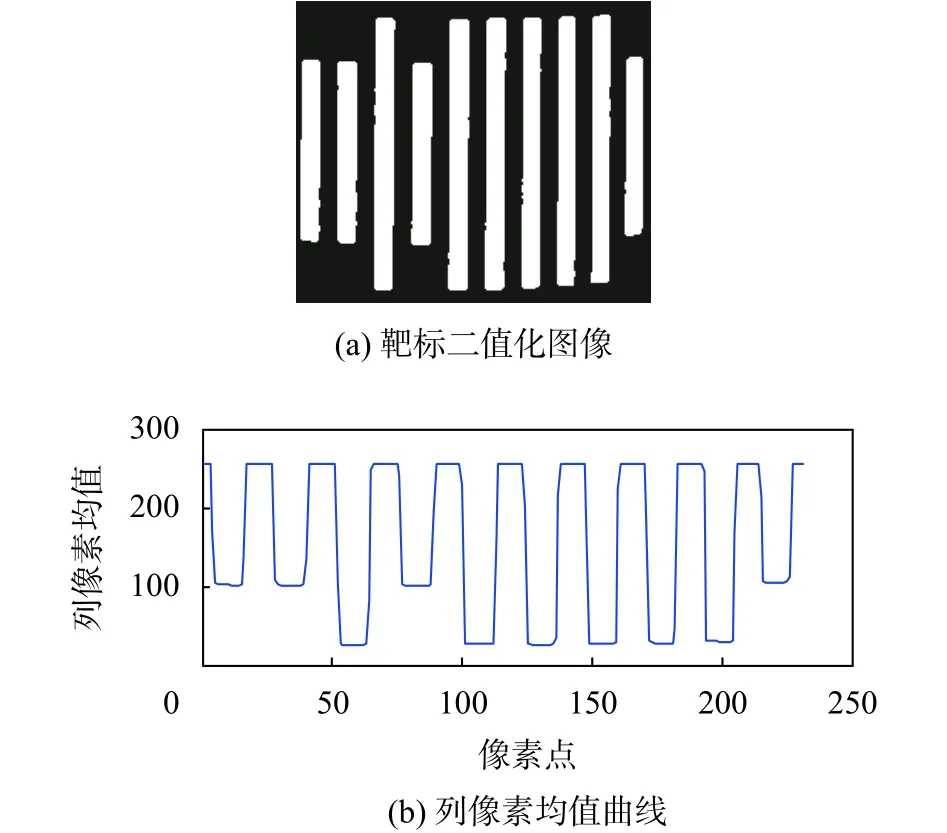
图3 靶标二值化图像及其对应的列像素均值曲线
1.2.1 相位检测
由图3(b)可知,列像素均值曲线是以靶标中黑、白条纹的宽度之和为周期的方波。采用下式对该曲线进行拟合,可获得曲线的相位信息:

式中:G——灰度;
φ——相位;
A——幅值;
B——直流分量。
图4为图3(b)对应的正弦拟合曲线,该曲线的相位 φ可提供精密的位移信息。

图4 列像素均值曲线的正弦拟合曲线
1.2.2 序列位置检测
靶标图像中连续7个白色条纹构成一个编码,该编码在整个靶标中的位置以0.5T的误差决定了平台当前的位移。检测图像中编码在整个靶标中的位置主要包括以下两个步骤:
1)生成编码
检测靶标的列像素均值曲线中上升沿和下降沿的位置,图像中第i个上升沿和第i个下降沿之间的曲线对应于第i个白色条纹;按顺序计算第i个上升沿和第i个下降沿之间列像素均值曲线的均值,即计算第i个白色条纹的像素均值;以图像中所有白色条纹的像素均值的一半作为阈值,某个白色条纹的像素均值大于该阈值,则该条纹的逻辑值为“1”,否则为“0”。将图像中前7个条纹的逻辑值拼接在一起即可得到图像的当前编码。
2)查询编码位置
以滑动窗的形式将图像的编码与靶标的编码序列进行对比,即可得到图像编码在靶标序列中的位置P。
1.2.3 位移计算
根据图像编码在靶标序列中的位置P和图像编码的相位 φ,采用下式可得到图像在靶标中的绝对位置:

其中T为编码周期长度,即黑白条纹的宽度之和。
进行位移测量时,分别计算测量起始点、终止点在靶标中的绝对位置:
即可得到两点间的相对位移为:

式中:P1、P2——测量起始点和终止点图像中编码的序列位置;
φ1和 φ2——测量起始点和终止点图像中编码的相位。
2 基于最大长度序列的旋转角度测量
将靶标粘贴在柱状待测旋转体的表面,利用摄像头拍摄旋转体运动过程中靶标的图像,计算靶标的位移后即可采用下式求得旋转体的旋转角度:

式中:x——靶标的位移;
R——旋转体的半径。
由于靶标覆盖在旋转体表面时,其首尾连接处无法形成完整的靶标条纹,因此无法实现360°转角的测量。
为了实现360°转角的测量,本文采用双靶标构建了旋转角度测量实验平台。将两个完全相同的靶标粘贴在旋转平台上,调整两个靶标的相对旋转位置,使得上靶标的首尾连接处和下靶标的首尾连接处不会同时出现在摄像头的视场中。选取上靶标首尾连接处和下靶标首尾连接处均不出现在摄像头视场中的任一位置作为起始点,记录此时摄像头视场中两个靶标的初始位置。测量过程中,主要以下靶标的图像信息计算旋转角度,当下靶标首尾连接处出现在摄像头视场中时,则采用上靶标进行角度测量。由于记录了测量起始位置时上下两个靶标的相对位置,因此利用上下靶标的图像计算出来的角度信息可以进行一一对应,从而实现了360°旋转角度的测量。
2.1 图像的变换
由于靶标粘贴在柱状体表面后,摄像头拍摄到的靶标图像存在变形,白色条码由摄像头视场中间向左右两边按照一定规律逐渐变窄,欲获取正常的编码信息,即靶标等长,且间距相等,需对图像进行拉伸铺平操作。
如图5所示,当摄像头视场左右中心线正对着被测旋转体中心时,整个靶标在图像中的长度为2R,但实际长度为πR。对于靶标中的任意一点,记该点在图像中距离o点的长度为x,距离o点的实际长度为y,则有:
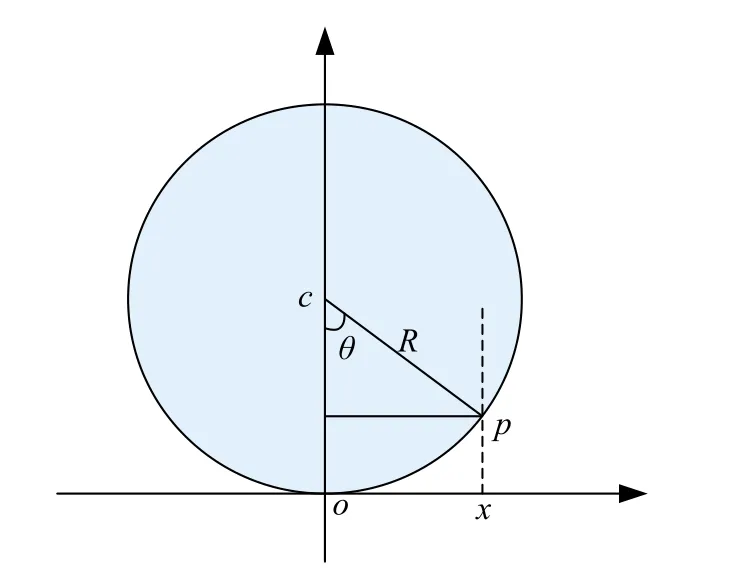
图5 图像拉伸分析示意图

式中:R——旋转体的半径;
θ——co和cp的夹角;
c——旋转体截面的圆心。
由式(9)、式(10)可得:

其中,< >为四舍五入运算。在图像中,x对应于拉伸前图像的像素横坐标,y对应于拉伸后图像的像素横坐标,因此可采用式(11)对图像进行拉伸变换。图6和图7分别为拉伸变换前后的靶标图像。
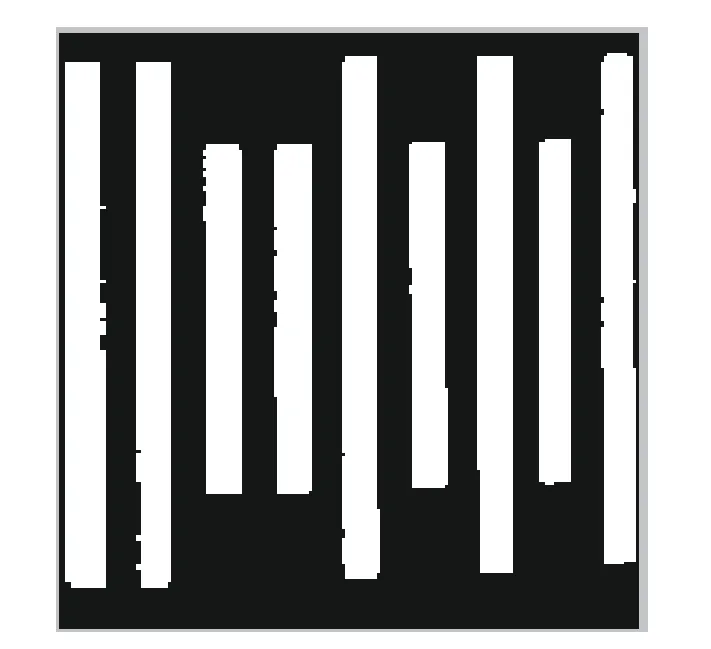
图6 拉伸前的图片
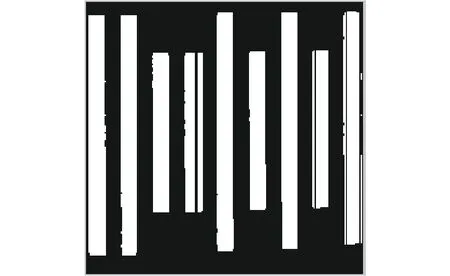
图7 拉伸后的图片
如图7所示,拉伸变换后的图像中存在断裂的情况,这些断裂带破坏了完整的条码结构,此时的图像无法用于位移计算。本文采用最邻近插值法对拉伸变换后的图像进行修复。
由式(11)可得拉伸前后图片的像素横坐标关系为:

因此,根据最邻近插值原理,将图7中像素点(py,qj)的像素值替换为图6中像素点 (px,qj)的像素值即可完成图像修复。插值修复后的图像如图8所示。
2.2 角位移计算
进行角位移测量时,摄像头拍摄测量起始点和终止点的靶标图像,对图像进行拉伸变换、插值修复后即可采用2中所述方法计算靶标的直线位移量,结合式(7)、式(8),可得角位移为:

3 实 验
为验证角度测量系统的有效性,采用图9所示的实验平台进行了实验研究。该实验平台选用大恒光电的GCD-0120800M电控旋转台作为旋转体,该旋转台的直径为80 mm,采用步进电机控制旋转角度,旋转角度分辨率为 0.00067°;选用具有200万像素的U2901型摄像头进行靶标图像的捕捉。实验时,将靶标粘贴在旋转台的外侧,摄像头正对着靶标捕获图像。
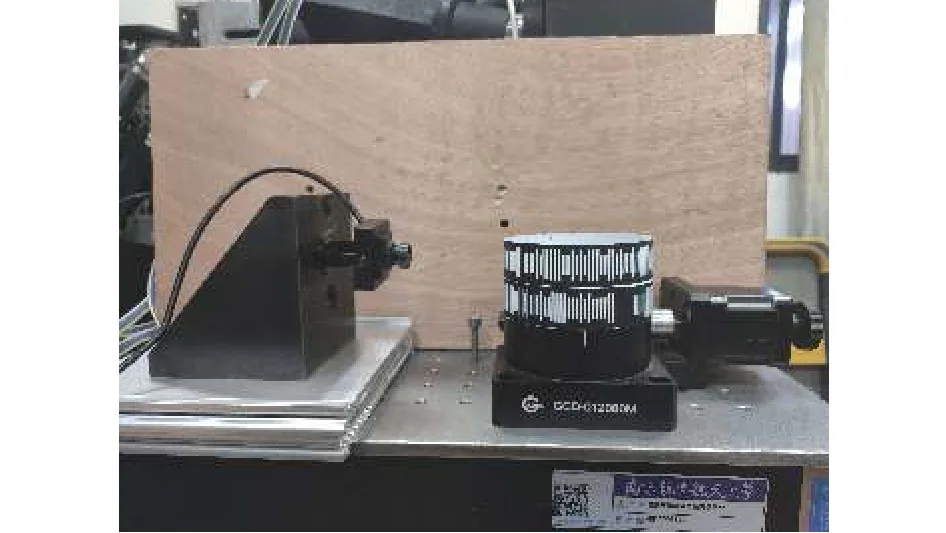
图9 角度测量系统实验平台
3.1 标定实验
控制旋转台在0°~360°范围内,以30°为间隔进行运动,在此过程中摄像头拍摄靶标图像并进行角度计算。忽略旋转平台的运动误差,得到如图10所示的平台在正、反行程运动3次的实验结果。采用正弦拟合和线性拟合对测量结果进行标定校正,校正后的测量误差如图11所示。

图10 行程测试实验结果
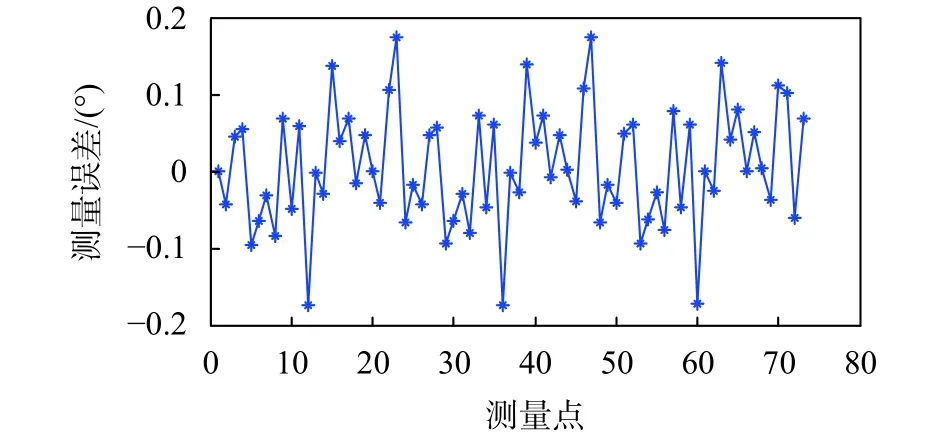
图11 标定后的误差曲线
3.2 静态特性测试实验
重复3.1中所述的实验,得到校正后的实验结果如表1所示。
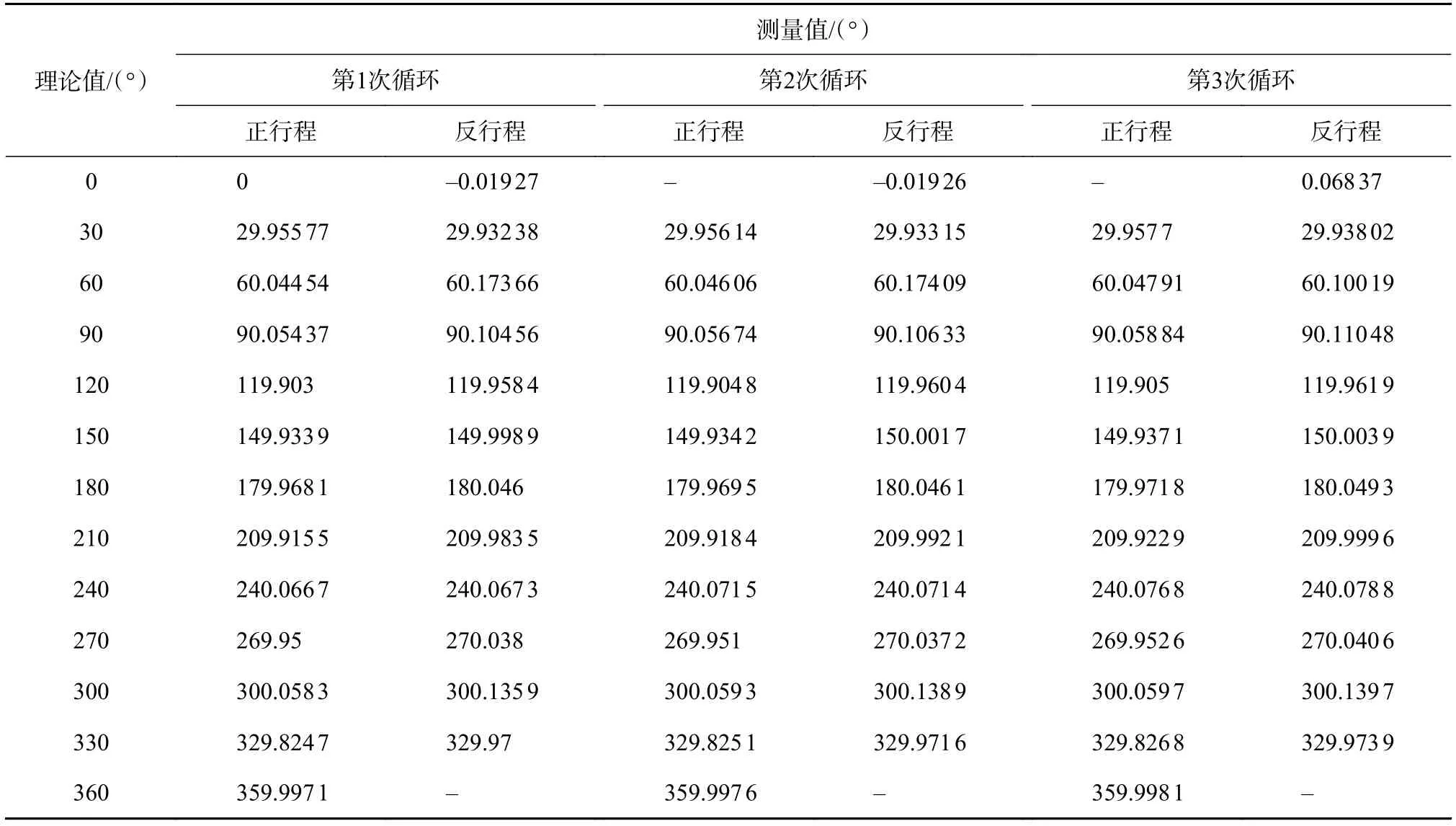
表1 角度测量实验数据
3.2.1 非线性误差
依据表1中的实验结果,采用式(14)得到角度测量的非线性误差ξL为0.027%。

式中:YFS——满量程输出;
ΔYL,max——各个校准点上的实际平均输出与理论输出的最大差值。
3.2.2 迟滞误差
采用式(15)得到角度测量的迟滞误差ξH为0.048%。

其中ΔYH,max为正行程和反行程平均校准特性之间的最大差值。
3.2.3 重复性误差
采用式(16),取置信概率系数为3,得到角度测量的重复性误差ξR为0.016%。
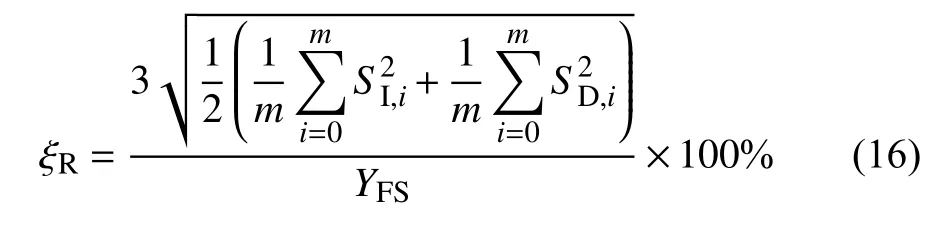
式中:m——校准点个数;
SI,i和SD,i——第i个校准点上正行程和反行程校准数据的标准偏差。
3.2.4 总误差
采用式(17)得到角度测量的总误差A为0.057%。

3.2.5 稳定性
转台静止状态下,每间隔5 s记录一次靶标图像,共记录50次,得到角度测量结果如图12所示。该实验中测量误差的均方差为0.00013°,误差的绝对值均值为 0.00011°。
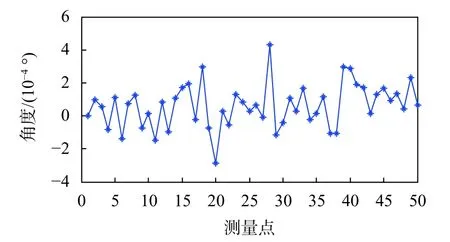
图12 稳定性测试实验结果
3.2.6 分辨率
控制转台在 0°~1°范围内,以 0.1°为间隔进行运动,得到实验结果如图13所示。该实验中测量误差的均方根差为0.015°,误差的绝对值均值为0.011°。该结果表明,角度测量分辨率优于0.1°。
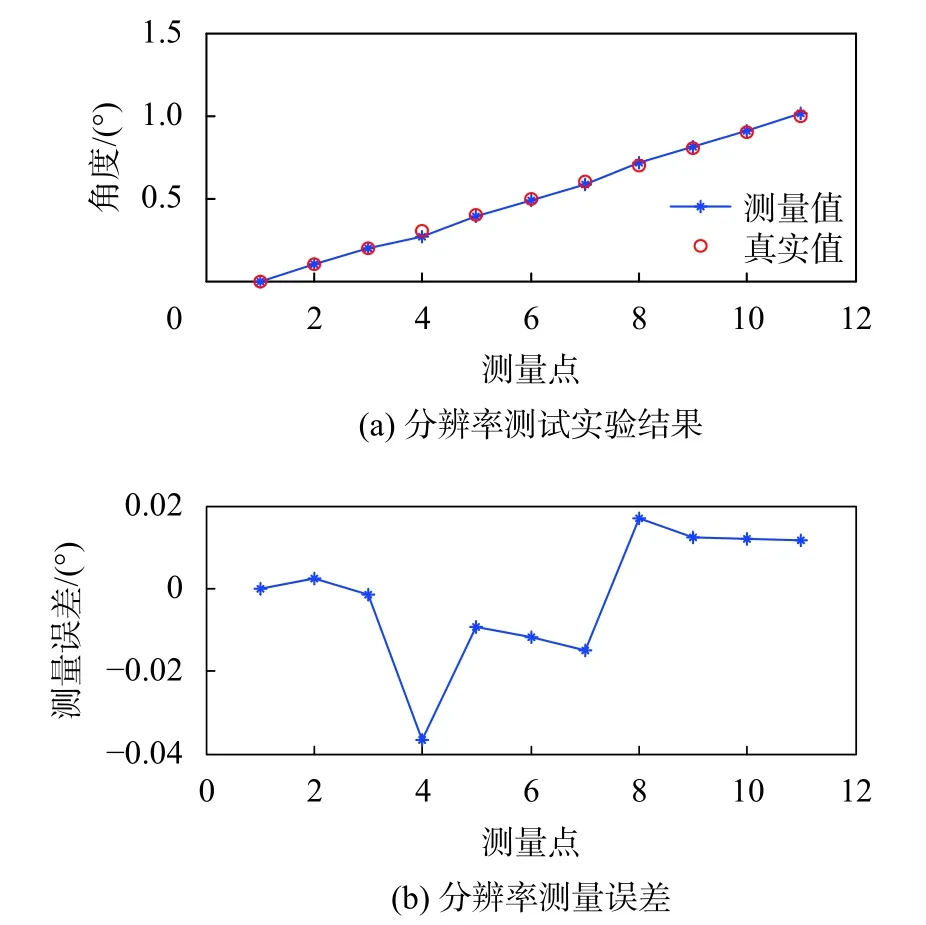
图13 分辨率测试实验结果
4 结束语
本文构建了基于视觉和最大长度序列的旋转角度测量系统,采用双靶标方案实现了柱状体0°~360°旋转角度的非接触式测量。该系统利用摄像头获取粘贴在柱状体侧面的靶标图像,经过图像拉伸变换、靶标序列及相位识别后即可实现角度的测量。测试结果表明,该系统的非线性误差为0.027% FS、迟滞误差为0.048% FS、重复性误差为0.016% FS、测量总误差为0.057% FS、分辨率优于0.1°。该系统可以在不拆卸机构和添加机械连接件的情况下实现旋转体转角的精密测量,在精密机械的智能化改造中有一定的应用价值。
猜你喜欢
今日农业(2022年4期)2022-11-16
中国交通信息化(2022年9期)2022-10-28
小哥白尼(军事科学)(2022年2期)2022-05-25
汽车工程师(2021年12期)2022-01-18
军民两用技术与产品(2021年10期)2021-03-16
计算机研究与发展(2019年9期)2019-09-16
红领巾·萌芽(2019年8期)2019-08-27
师道·教研(2019年7期)2019-08-13
CHIP新电脑(2016年3期)2016-03-10
汽车维修与保养(2015年8期)2015-04-17
