
CAE 公司737NG 模拟机前轮转弯系统故障分析
2022-03-10 01:45张恒
设备管理与维修 2022年1期
张 恒
(云南东方飞行培训有限公司,云南昆明 650214)
0 引言
飞行模拟机用来模拟飞行时所有的操纵,前轮转弯系统是控制载荷系统(Control Loading)的一部分,用来模拟飞机正常及紧急情况下前轮转弯时手轮的操纵情况。控制载荷系统分为动态控制载荷和静态控制载荷:动态控制载荷本质上是由伺服系统控制的伺服驱动装置,前轮转弯系统就属于动态控制载荷;静态控制载荷是简单的机电装置,飞行员训练时所需要的操纵力大小是事先由系统确定好的,该控制载荷系统通过接口与节点计算机进行通信。静态控制载荷又可以分为主动静态控制载荷和被动静态控制载荷,这里不再详述。
前轮转弯系统由转弯手轮、传动链条和钢索、ELU(Electromechanical Load Unit,电动机械载荷单元)组成。ELU 又是由电机、伺服放大器、EID(Electric Load Identification,电动载荷身份识别器)、1/4 转动圆盘、位置编码器、力传感器等组成(图1)。
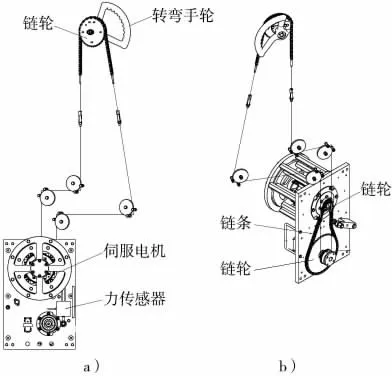
图1 前轮转弯系统机械结构
1 前轮转弯系统原理
模拟机的前轮转弯系统有别于真飞机的前轮转弯。飞行员训练时,操纵前轮转弯手轮,手轮带动与之相连的链条转动,链条的后端连接着钢索,钢索连接在电机的端头上,节点计算机计算出当前情况下,所需飞行员施加的力,通过电机来实现力大小的变化。力传感器和1/4 转动圆盘、位置编码器也连接在电机的端头上。节点计算机通过飞机当前所处的具体情况、飞行员施加在手轮上的力来计算出当前电机应当输出的力,这样飞行员就有了操纵的感受(图2)。力传导和力反馈的具体过程如下:
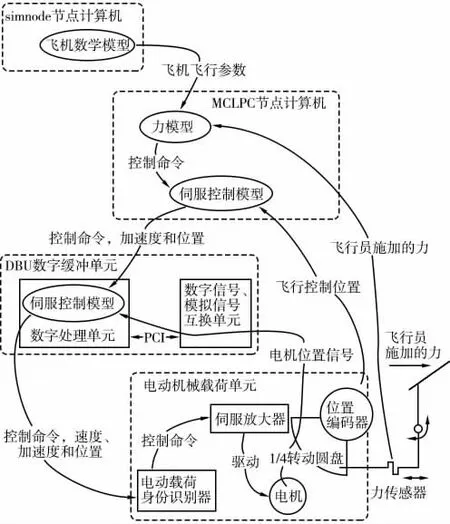
图2 操纵杆的力传导和反馈
(1)Simnode 节点计算机中存储着飞机的数学模型,MCLPC节点计算机中存储着力的模型和伺服控制模型,DBU(Digital Buffer Unit,数字缓冲单元)模块中包括cPDSP(CompactPCI Digital Signal Processor,数字信号处理单元)和cPAD(Compact-PCI Analog Digital Input/Output,数字信号模拟信号互换单元),Load Unit(电动机械载荷单元)如前文所述。
(2)在飞行中,力传感器将飞行员所施加的力传递给MCLPC,Simnode 节点计算机将飞机飞行参数也传递给MCLPC,MCLPC利用它们计算出操纵电机的命令,再经过多次计算,最终利用伺服放大器控制电机转动。
(3)力传感器将飞行员的力反馈至MCLPC 节点计算机;位置编码器将飞行控制位置传递给伺服控制模块;电机位置通过位置编码器反馈至cPDSP。
(4)驱动电机的命令都是计算当前飞机所处情况和反馈信号而得到的,这里类似于自动控制中的闭环控制。飞行员施加在操纵杆、盘、轮上力的大小,是由计算机实时计算得出的,因此飞行模拟机在模拟飞行操纵卡阻时非常方便,只需要控制电机输出力的大小,让飞行员难以操纵驾驶杆、盘、轮即可,这也是飞行训练中重要的训练内容。
2 前轮转弯故障现象和分析
此次前轮转弯的故障现象是,模拟机所模拟的飞机前轮正向前,但前轮转弯手轮不在中立位置,在此位置上不操纵手轮,飞机能沿直线滑行。飞机滑行时也可以使用前轮转弯手轮操纵飞机转弯,但是当手轮转到LEFT 或RIGHT 的极限位置时,飞机左转和右转的幅度差距比较大。断开控制载荷系统,也可以自由转动前轮转弯手轮。
故障分析:基于上述故障现象,检查前轮转弯系统的机械连接,未发现有卡滞的地方,使用CAE 公司的jDFC 校准软件,进行前轮转弯系统的摩擦力分析时,摩擦力在系统允许的范围内。由此分析,此故障应该发生在位置编码器上,因为位置编码器记录着前轮转弯手轮的中立位置、极限位置等重要信息。位置编码器的位置信息丢失一般是由于模拟机断电并且位置编码器的电池也失效的情况造成的。当编码器电池正常,即使模拟机断电,位置编码器也不会丢失位置信息,即位置编码器电池是编码器的供电备份。
3 转弯手轮不在中立位置故障的排出方法
CAE 公司各个系列模拟机的控制载荷系统部件虽然有一些差别,但是模拟载荷的原理一样。每一台模拟的模拟不同的操纵(俯仰、横滚、偏航、脚尖刹车)都需要一套与之对应的控制载荷系统,因此一台模拟机会有许多的位置编码器和编码器电池,一旦电池失效,在模拟断电的情况下就有可能造成位置等重要信息丢失。
排除故障的方法就是使用CAE 公司的控制载荷校准软件jDFC 软件校准零位,并且更换编码器电池。
用机械的办法将前轮转弯手轮固定在中立位(即Center位)上。在MCLPC 节点计算机上打开jDFC 软件,选择前轮转弯模拟通道,点击“test”菜单,选择“Encoder zeroing”子菜单,点击执行(图3)。执行完成之后,将会生成后缀名为.ddm、.dds、.ddh的文件,选择保存文件。将此文件拷贝到Opserver 节点计算机相应的文件夹下,因为MCLPC 节点计算机在下次boot 时,需要从Opserver 节点计算机上加载此校准文件来执行对控制载荷系统的操纵。

图3 jDFC 软件使用界面
最后,更换此前轮转弯系统的编码器电池。需要特别注意的是,在更换电池时一定要保证模拟机时在通电的情况下。否则,此系统的中立位置信息还会丢失。
4 维护建议
加拿大CAE 公司模拟机的控制载荷系统是一套既有硬件机械、又有软件控制的复杂系统。在进行故障分析排除时,可以先检查机械系统有无故障,然后再检查调试软件系统。
几乎所有电池都有使用时间的限制,编码器电池也不例外。建议检查所有安装有编码器电池的控制载荷系统,定期(一般为5 年)更换编码器电池,以防在模拟机断电时,位置编码器丢失重要信息,造成操纵杆、盘、轮不在中立位置等故障,防止模拟机AOG 情况的发生,保障模拟机正常运行。
由此类推到模拟机的其他系统,模拟机的运动柜、吊桥系统、P1 电柜(模拟机主要的供电柜)的UPS 都有电池,需要按照更换周期进行更换。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
科学技术创新(2021年5期)2021-03-17
民用飞机设计与研究(2020年4期)2021-01-21
——编码器
演艺科技(2020年7期)2020-08-13
小学生学习指导·爆笑校园(2019年6期)2019-09-10
环球时报(2019-03-22)2019-03-22
汽车工程学报(2017年2期)2017-07-05
军民两用技术与产品(2017年5期)2017-04-25
红蜻蜓·低年级(2015年11期)2016-02-02
探测与控制学报(2015年4期)2015-12-15
