一种可以进行AGV无人化作业的集装袋
2022-03-16 09:07王仁龙整理
塑料包装 2022年1期
王仁龙 整理
一、概述
集装袋又称吨袋或吨包袋,是一种柔性包装容器,多应用于产业链上游行业,如矿产品、化工品、粮食、水泥等大宗产品的包装运输,是一种低成本、大容量,适用于快速装卸的包装物,已被广泛使用近二十年。
无人搬运车(Automated Guided Vehicle,简称AGV),通常也称为AGV小车。指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护及各种移载功能的运输车。
视觉引导式AGV是正在快速发展和成熟的AGV,该种AGV上装有CCD摄像机和传感器,在车载计算机中设置有AGV欲行驶路径周围环境图像数据库。AGV行驶过程中,摄像机动态获取车辆周围环境图像信息并与图像数据库进行比较,从而确定当前位置并对下一步行驶做出决策。无人搬运车(AGV)作为工业车辆发展的必然趋势,能够更好地解放人力并让其投身于更具价值的工作中去;同时还能够帮助企业再次提升生产、仓储环节的运营和管理效率,并降低人工成本,缓解企业招工、用工难等问题,无论是对企业还是社会都具有着积极意义。
而在集装袋的装卸作业领域,现有技术方案仍是由司机驾驶传统的叉车叉载货物。工作时,按照集装袋大小来调整货叉的距离,集装袋所有起吊环、吊耳或其他起吊装置应呈垂直状态,货叉插入起吊装置后,将货叉升起,集装袋吊离地面300至400毫米左右行驶。
现有技术最为显著的缺点便是现有集装袋无法实现无人化搬运。原因在于,AGV无人搬运车在柔性集装袋装卸作业中,因集装袋起吊环、吊耳或其他起吊装置质地柔软,在无人状态下无法呈现垂直状态,且在集装袋顶部呈现无规则分布状态,导致AGV无人搬运车无法准确识别吊耳的具体位置,不能确保准确捕获吊耳,造成装卸失败。若采用夹抱集装袋的搬运方式,因袋体柔软且袋口包扎不紧实,叉车夹抱集装袋后,物料因重力下沉,引起位于夹具下部的袋体膨胀变形,容易导致集装袋从夹具中脱落,或夹具在集装袋体施压后,物料从袋口溢出,导致压力外泄,搬运失败。
而集装袋加托盘的装卸方式需要额外配置托盘,在物流转运中面临托盘回收的问题,进一步抬升装卸成本,且带托盘运输,对车辆内的集装袋堆码造成困难,因此集装袋加托盘的装卸方式企业很少采用。
针对现有技术的不足之处,本文介绍了一种可以进行AGV无人化作业的集装袋,该集装袋的吊装带呈十字交叉形态布置,位于吊耳处的铁质对接元件使得AGV设备可以准确定位吊耳的位置,实现AGV无人化装卸作业。
二、技术方案
一种可以进行AGV无人化作业的集装袋,包括集装袋袋体、填料口、卸料口和吊装带;所述吊装带包括设于集装袋袋体上的吊装带一和吊装带二,所述吊装带一和所述吊装带二呈十字交叉状设置,并在集装袋袋体的顶部上方连接成十字交叉形态的吊耳;所述吊耳的上侧设有铁质对接元件;所述铁质对接元件上设有二维码,使可以通过扫描二维码记录、获取搬运轨迹及位置信息;所述集装袋袋体的中部沿周向设有机器视觉识别带。
与现有技术相比,本技术的可以进行AGV无人化作业的集装袋的吊装带在集装袋顶部呈现规则十字交叉形态分布,并通过连接形成吊耳,且吊耳上侧设有铁质对接元件可与AGV搬运车上的磁力装置对接,使得AGV无人搬运车能够准确识别吊耳的具体位置,能确保货叉准确抓取所有吊耳,完成吊装过程,从而,配合配套的AGV无人搬运车,可以实现自主装车,出入库无人化作业,减少装卸人工成本。
所述吊耳下侧设有防尘盖,所述防尘盖的下侧和所述集装袋袋体的顶部对应设有配套使用的魔术贴组件。由此,在装卸结束后,可以通过防尘盖盖住填料口,防止灰尘进入集装袋。
所述防尘盖的颜色和所述集装袋袋体的颜色构成对比色。该设计使得AGV无人搬运车可以通过机器视觉识别防尘盖,然后将吊具移动到防尘盖的上方,以便磁力装置与铁质对接元件顺利对接,相比其它方式更易于实施。
所述防尘盖呈圆形,所述防尘盖上侧面和所述吊装带通过车接的方式缝接,所述防尘盖下侧面外沿设有魔术贴钩面,所述集装袋袋体的顶部相应地设有魔术贴毛面。防尘盖通过魔术贴与集装袋袋体的顶部连接,实施成本低,且使用便利性好。
所述机器视觉识别带表面纹路为黑白间隔的平面栅格。平面栅格是一个类似棋盘的模式,AGV无人搬运车上搭载的视频摄像机计算机抽取平面栅格的角点,通过平面栅格标定实现AGV计算机视觉技术的特征提取,易于实施,且可靠性高。
所述铁质对接元件包括配合使用的上扣件和下扣件,上扣件和下扣件通过螺栓实现固定连接;所述上扣件和下扣件上各设有一处穿带孔,所述上扣件和下扣件上的穿带孔呈交叉状分布,所述吊装带一和吊装带二分别从上扣件和下扣件上的穿带孔中穿过实现连接。铁质对接元件采用上述构造,不仅可以用于和AGV搬运车上磁力装置对接,而且还起到连接吊装带一和吊装带二的作用,从而不需要使用专门的连接元件连接吊装带一和吊装带二,结构得到简化,易于实施,有利于控制制造成本。
所述填料口和卸料口上分别设有填料口防水密封组件和卸料口防水密封组件;所述填料口防水密封组件包括至少一组设于填料口内壁的魔术贴、至少一组设于填料口外壁的魔术贴和一组设于填料口外壁的填料口快捷子母插扣;所述卸料口防水密封组件包括至少一组设于卸料口内壁的魔术贴、至少一组设于卸料口外壁的魔术贴,以及一组设于卸料口外壁的卸料口快捷子母插扣。快捷子母插扣和魔术贴组合使用既保证了良好的防水防潮性,又能保证集装袋装物料时的可靠性,同时具有使用方便的优点。
所述集装袋袋体采用PVC涂层布或TPU涂层布作为基布。集装袋袋体采用PVC涂层布或TPU涂层布作为基布,袋体的抗压强度好。
三、附图说明
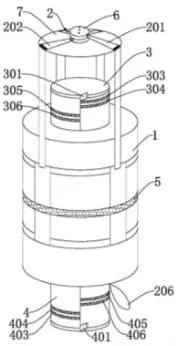
图1 本技术的整体结构示意图

图2 本技术的顶部结构示意图
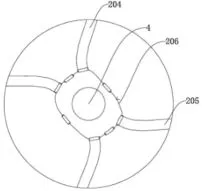
图3 本技术的底部结构示意图

图4 本技术中防尘盖下侧面的结构示意图
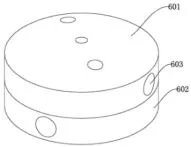
图5 本技术中铁质对接元件的结构示意图
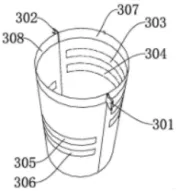
图6 本技术中填料口的结构示意图
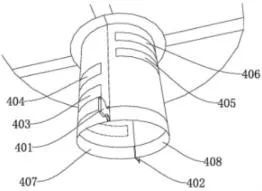
图7 本技术实中卸料口的结构示意图
四、具体实施方式
一种可以进行AGV无人化作业的集装袋,包括集装袋袋体1、填料口3、卸料口4和吊装带2;所述吊装带2包括设于集装袋袋体1上的吊装带一201和吊装带二202,所述吊装带一201和所述吊装带二202呈十字交叉状设置,并在集装袋袋体1的顶部上方连接成十字交叉形态的吊耳203;所述吊耳203的上侧设有铁质对接元件6;所述铁质对接元件6上设有二维码,使可以通过扫描二维码记录、获取搬运轨迹及位置信息;所述集装袋袋体1的中部沿周向设有机器视觉识别带5。
所述吊耳203下侧设有防尘盖7,所述防尘盖7的下侧和所述集装袋袋体1的顶部对应设有配套使用的魔术贴组件。在装卸结束后,所述防尘盖7盖住填料口7,防止灰尘进入集装袋。
所述防尘盖7的颜色和所述集装袋袋体1的颜色构成对比色,该设计使得AGV无人搬运车可以通过机器视觉识别防尘盖7,然后将吊具移动到防尘盖7的上方,以便磁力装置与铁制对接元件6顺利对接,相比其它方式更易于实施。
所述防尘盖7呈圆形,所述防尘盖7上侧面和所述吊装带2通过车接的方式缝接,所述防尘盖7下侧面外沿设有防尘盖魔术贴钩面701,所述集装袋袋体1的顶部相应地设有魔术贴毛面。
所述机器视觉识别带5表面纹路为黑白间隔的平面栅格。平面栅格是一个类似棋盘的模式,AGV无人搬运车上搭载的视频摄像机计算机抽取平面栅格的角点,通过平面栅格标定实现AGV计算机视觉技术的特征提取。
所述铁质对接元件6包括配合使用的上扣件601和下扣件602,上扣件601和下扣件602通过螺栓实现固定连接;所述上扣件601和下扣件602上各设有一处穿带孔603,所述上扣件601和下扣件602上的穿带孔603呈交叉状分布,所述吊装带一201和吊装带二202分别从上扣件601和下扣件602上的穿带孔603中穿过实现连接。铁制对接元件采用上述构造,不仅可以用于和AGV搬运车上磁力装置对接,而且还起到连接吊装带一和吊装带二的作用,从而不需要使用专门的连接元件连接吊装带一和吊装带二,结构得到简化,易于实施,有利于控制制造成本。
所述填料口3和卸料口4上分别设有填料口防水密封组件和卸料口防水密封组件;所述填料口防水密封组件包括至少一组设于填料口3内壁的魔术贴、至少一组设于填料口3外壁的魔术贴和一组设于填料口3外壁的填料口快捷子母插扣;所述卸料口防水密封组件包括至少一组设于卸料口4内壁的魔术贴、至少一组设于卸料口4外壁的魔术贴,以及一组设于卸料口4外壁的卸料口快捷子母插扣。快捷子母插扣和魔术贴组合使用既保证了良好的防水防潮性,又能保证集装袋装物料时的可靠性,同时具有使用方便的优点。
所述集装袋袋体1采用PVC涂层布作为基布,袋体的抗压强度好。
所述设于填料口3内壁的魔术贴包括对应分布于填料口3端口附近内壁两侧的填料口内壁魔术贴勾面307和填料口内壁魔术贴毛面308;所述设于填料口3外壁的魔术贴包括呈上下对应分布于填料口3外壁上的填料口外壁魔术贴勾面和填料口外壁魔术贴毛面;所述设于填料口3外壁的填料口快捷子母插扣包括对应分布于填料口3外壁两侧的填料口快捷插扣母扣301和填料口快捷插扣子扣302;所述设于卸料口4内壁的魔术贴包括对应分布于卸料口4端口附近内壁两侧的卸料口内壁魔术贴勾面407和卸料口内壁魔术贴毛面408;所述设于卸料口4外壁的魔术贴包括呈上下对应分布于卸料口4外壁上的卸料口外壁魔术贴勾面和卸料口外壁魔术贴毛面;所述设于卸料口4外壁的卸料口快捷子母插扣包括对应分布于卸料口4外壁两侧的卸料口快捷插扣母扣401和卸料口快捷插扣子扣402。所述填料口内外壁的两侧为填料口3沿着母线折叠形成的两侧;所述卸料口内外壁的两侧为卸料口4沿着母线折叠形成的两侧。
所述收紧带一204和所述收紧带二205一端折叠车接形成穿绳孔;所述袋体1的底部,靠近所述卸料口4位置,与所述底部收紧段对应设有收紧环206。使用时,可以拉紧收紧环206,然后打结锁紧,防止袋体1的底部因受力出现撕裂。
对上述实施例中的可以进行AGV无人化作业的集装袋进行无人化装卸作业时,配套使用的AGV无人搬运车上配备有吊具,吊具上设有与铁质对接元件6配套使用的磁力装置;
作业过程可以包括如下步骤:
1)AGV无人搬运车通过机器视觉识别集装袋袋体1上的机器视觉识别带5;
2)AGV无人搬运车将配备的吊具移动至集装袋袋体1顶部上方,通过吊具上的磁力装置的磁吸力作用,使磁力装置与设于吊耳203上侧的铁质对接元件6对接,然后使吊耳203随吊具提起,脱离集装袋袋体1;(执行本步骤后,防尘盖7仍与集装袋袋体1连接)
3)AGV无人搬运车利用吊具上的机械手抓住吊耳203,然后利用吊具将整个集装袋抬起(抬起过程中,首先防尘盖7脱离集装袋袋体1,然后吊装带随吊具上升,张紧成如图1所示的状态,张紧后将集装袋整体抬起),按照设定路线将集装袋运送至指定位置,卸载;
4)通过吊具上的扫码装置,扫描铁质对接元件6上的二维码,获取集装袋的身份信息,并将集装袋的身份信息连同本次搬运的路线和终点信息传送给云服务器进行保存。(管理员可以通过扫描获取集装袋的搬运轨迹以及目前所处的位置)
猜你喜欢
中国特种设备安全(2022年5期)2022-08-26
航天制造技术(2022年3期)2022-07-15
铁道建筑(2022年4期)2022-05-10
导弹与航天运载技术(2022年2期)2022-05-09
铁道勘察(2022年2期)2022-04-19
铁道学报(2021年8期)2021-09-09
水电与新能源(2020年9期)2020-10-12
小学阅读指南·高年级版(2020年4期)2020-06-15
铁道建筑技术(2020年11期)2020-05-22
船海工程(2019年3期)2019-07-03