
SLAM专利技术分析
2022-04-16 06:22寇惠云
科技创新与应用 2022年9期
寇惠云,刘 洛,张 超
(国家知识产权局专利局专利审查协作四川中心,四川 成都 610213)
SLAM(simultaneous localization and mapping),也称为CML(Concurrent Mapping and Localization),即时定位与地图构建,或并发建图与定位,是近年来的一项热点研究技术,其广泛应用于机器人定位导航、VR/AR、无人机和无人驾驶等领域。
根据SLAM技术采用的硬件传感器和软件算法,可以将SLAM技术划分为激光雷达SLAM、视觉SLAM、新颖SLAM和复合SLAM 4类。激光雷达SLAM技术又可进一步分为单线激光和多线激光2类;视觉SLAM按照视觉传感器类别可以分为单目相机、双目相机以及RGB-D相机3种;新颖SLAM主要基于深度学习端到端法和基于模式识别语义法;复合SLAM主要包括激光+视觉的SLAM和IMU+视觉的SLAM[1-3],SLAM技术分类如图1所示。

图1 SLAM技术分类
1 SLAM专利技术构成
根据本文研究的检索数据集合SLAM技术的构成[4],可以将SLAM专利技术划分为传感器数据、视觉里程计、后端算法、建图和回环检测五大类。从图2可以看出,随着人工智能技术的发展,其与SLAM技术的结合主要在回环检测方向较为紧密,同时随着硬件传感器技术的不断迭代更新,硬件传感器方面呈现出多传感器复合应用的趋势。
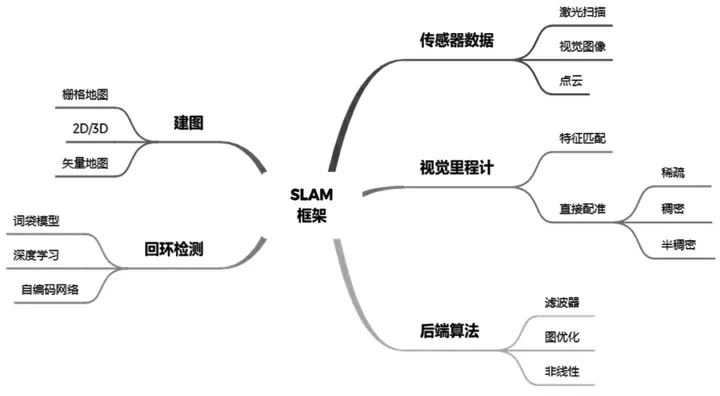
图2 SLAM专利技术构成
2 专利申请趋势分析
本小节从SLAM学术研究概况和SLAM专利技术申请趋势比对分析来探讨SLAM技术的整体发展趋势。
一方面,从学术研究概况来看,SLAM是由Smith Self和Cheeseman于1986年首次提出,距今为止已经发展了30多年[5],其主要发展历程可划分为以下3个时代:传统时代classical age(1986-2004):SLAM问题的提出,并将该问题转换为一个状态估计问题,利用扩展卡尔曼滤波、粒子滤波及最大似然估计等手段来求解。算法分析时代algorithmic-analysis age(2004-2015):研究SLAM的基本特性,包括观测性、收敛性和一致性。鲁棒性-预测性时代robust-perception(2015-):鲁棒性、高级别的场景理解,计算资源优化,任务驱动的环境感知。由此可知,SLAM技术自上世纪80年代出现以来已经过多年发展,随着各类软硬件技术的持续更新,其已逐渐迈入人工智能的时代。
另一方面,从图3全球SLAM技术专利申请趋势来看,其可以划分为萌芽期、发展期和快速发展期。根据专利检索数据分析结果来看,最早的关于SLAM技术的专利申请出现在2002年前后,直到2005年,其申请量增长缓慢,该时期对应学术研究领域中的传统时代。虽然SLAM技术出现较早,但其专利技术出现的时间与学术研究并不同步,主要原因在于早期SLAM技术主要应用于军事领域,常见于潜艇的水下导航,较少应用于民用设备和产品中,因此,在2000年以前较少有相关的专利技术出现。

图3 SLAM全球专利申请趋势
从2005年开始,其年申请量开始逐年上涨,但增幅并不明显,直到2015年,全球年申请量达到600件以上。这一时期对应学术研究领域的算法分析时代,其专利技术更多地停留在学术研究层面,产业化程度较低是导致其申请量未出现明显增长的主要原因。自2015年以来,该项技术的年申请量急速上涨,增速极为明显,在5年时间里年申请量从600余件增长到2019年的3 000多件,达到历史最高峰,已处于快速发展阶段。主要原因在于,近年来随着机器人定位导航、VR/AR、无人机和无人驾驶等技术的快速发展,SLAM技术的产业化进程得以加快,尤其是在上述各领域内均有较为丰富的市场产品作为支撑,使得其专利申请量呈现显著增长趋势。
SLAM专利技术国内外申请趋势如图4所示,从SLAM专利技术的国内申请趋势来看,国内申请人虽然在该项技术的起步稍晚,直到2006年前后才陆续出现相关的专利申请。国内最早的关于SLAM的专利技术出现在2006年(CN100449444C-申请人:浙江大学;发明名称:移动机器人在未知环境中同时定位与地图构建的方法),在2015年以前,其申请量增长缓慢,2015年之后,中国的原创专利技术申请量增速显著提升,截至2019年,在SLAM技术领域,中国原创专利技术申请量已超过全球年申请量的50%。中国市场的持续发力,也在很大程度上促使该项技术的全球专利申请增长趋势显著提升。
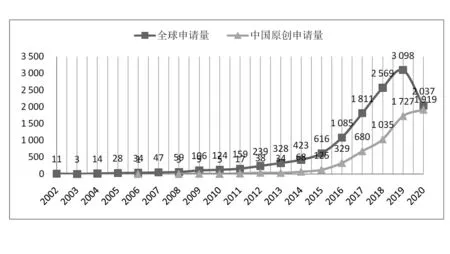
图4 SLAM专利技术国内外申请趋势
最后,从SLAM专利技术的目标市场分布(如图5所示)来看,中国市场处于主导地位,以6 113项专利稳居第一,其次为美国市场,达3 147项,日本、欧洲及韩国紧随其后,此外,在澳大利亚及印度市场有少量专利进入。因此,该项技术的活跃区域主要分布在中国、美国及日本市场。

图5 SLAM专利技术目标市场分布
3 SLAM重点申请人和主要研发方向
3.1 重点申请人
专利申请人是专利申请的载体,也是专利布局的谋划者。因此通过分析该领域重点申请人的状况,进一步对该项专利技术的整体态势产生更深入的认识。SLAM专利技术重点申请人如图6所示。

图6 SLAM专利技术重点申请人
根据如图6(a)所示的SLAM专利技术全球重点申请人排名,发现全球重点申请人主要为国外的企业,前十名:索尼、丰田、LG、FACEBOOK、三星、谷歌、MagicLeap、ZOOX、微软和Robert Bosch。对上述申请人的相关专利进行进一步挖掘分析可以发现,在机器人定位导航领域布局较多的是索尼(智能机器人方向)和LG(扫地机器人方向);在VR/AR领域布局较多的是索尼、微软、FACEBOOK和Magic Leap;在无人机和无人驾驶领域布局较多的是谷歌(主要为其子公司Wing Aviation Inc.)、ZOOX、索尼、丰田和Robert Bosch。可见,索尼针对该项技术的研发和应用所涉及的领域最为全面,其次是谷歌,其在无人机和无人驾驶领域针对该项技术的研发力度较大。
根据如图6(b)所示的SLAM专利技术中国市场重点申请人排名,发现在国内市场,全球排名前十的重点申请人中仅有索尼和三星,其他全球重点申请人的专利申请并未进入中国市场。此外,国内的企业和高校均有较大申请量,针对其专利技术进行挖掘分析发现,在中国市场,该项技术的专利申请主要集中在以下几个方向和重要的申请人手中:石头科技、东南大学和清华大学在机器人定位和导航领域申请量较大;索尼、OPPO、腾讯、联想和三星等在中国市场主要在VR/AR技术领域针对SLAM技术的应用较多;在无人机和无人驾驶领域,以北京航空航天大学、清华大学及驭势科技有限公司较为突出。
从上述分析可知,SLAM技术在国外的产业化进程更为成熟,其主要研发主体已从高校、科研院所过渡到重点企业和大型企业,且在各个技术领域均有较为丰富的市场产品。而从中国市场来看,其仍然处于产业化的过渡时期,在部分技术领域仍然以科研院所和高校申请为主,仍处于从实验室研究向市场应用过渡的阶段,如无人驾驶和机器人导航定位方向。
3.2 重点研发方向
根据SLAM专利技术在各个领域的应用情况,对VR/AR、自动驾驶和扫地机器人3个产业化最为成熟领域的重点申请人及其重点研发方向进行分析。SLAM技术重点研发方向如图7所示。从图7(a)可以看出,索尼、FACEBOOK、Magic Leap、三星和微软在VR/AR技术领域针对该项技术的应用较为集中,同时按照SLAM技术在VR/AR中的应用方向进行聚类归集可以发现,上述申请人主要将SLAM技术应用在VR/AR领域中的图像处理、界面交互、相机控制及图像识别等重点方向以提高虚拟现实技术的处理速度、精度和准确性等为主。图7(b)为SLAM技术在自动驾驶领域的应用分布,以丰田、ZOOX、Robert Bosch和驭势为代表的重要申请人主要将其应用于自动驾驶领域的位姿控制、路线规划和搜索、防撞及环境识别等热点方向。图7(c)为SLAM技术在扫地机器人领域的应用分布,以LG、iRobot和石头科技为代表的重要申请人主要将其应用于扫地机器人领域的程序控制、环境检测、路径导航和场景识别等热点方向。

图7 各领域SLAM技术重点研发方向
4 SLAM专利技术保护运营情况
鉴于SLAM专利技术在国内外已初步完成产业化,且在各个领域应用已较为成熟,市场产品比较丰富。本章节基于检索的专利数据集挖掘SLAM专利技术的法律数据情况,针对国内市场,从专利质押、专利许可和专利侵权诉讼3个方面探讨SLAM专利技术的知识产权保护运营模式。
4.1 专利质押
专利质押不仅可以解决中小企业融资问题、拓展金融机构的业务,而且还可以激励企业自主创新,促进专利技术的传播和应用,提升专利的社会价值[6]。通过对已授权的SLAM专利的法律数据进行分析发现,有3件实用新型(CN20982042U、CN207881713U、CN2071 80663U)和1件授权发明专利存在质押情况,其涉及的技术分别为三维地貌测量、无人机摄影测量和扫地机器人导航。其中授权发明专利为深圳市杉川机器人有限公司持有,该项专利与其经营的激光雷达业务相关,作为一家研发机器人的企业,该项技术已被其成熟地应用在其工业机器人、家用机器人和商用机器人等不同市场产品上。中国市场SLAM专利技术质押情况如图8所示。

图8 中国市场SLAM专利技术质押情况
4.2 专利许可
专利许可是指专利权人将其所拥有的专利技术许可他人实施的行为[7]。通过对已授权的SLAM专利的法律数据进行分析发现,有多件发明专利产生过许可实施行为,中国市场SLAM专利许可情况如图9所示。并且根据专利权人和被许可人的类别又可进一步分为内部许可、产学研转化及行业许可3种情况。

图9 中国市场SLAM专利技术许可情况
内部许可模式:广州小鹏汽车科技有限公司于2019年申请获得授权的2件发明专利(CN109887053 B、CN109466546B)涉及SLMA地图拼接和自动泊车被许可给其子公司肇庆小鹏新能源投资有限公司实施,用于新能源汽车制造。
产学研转化模式:科研院所和高校类研发主体一般具有较强的技术研发能力,但在市场产品生产方面存在不足。因此,以高校技术研发为基础,寻求企业合作实施是目前此类研发模式实现技术转化的有效手段。以浙江大学和苏州科技大学为例,其依靠强大的科研实力在早期做过相关的专利布局申请,获得授权后将相关的技术许可给对应的企业。其中,发明专利授权公开号为CN100449444C的专利,是目前国内申请中最早的一批关于SLAM技术的发明专利,其于2006年申请,2009年获得授权,随后被许可给杭州南江机器人有限公司,该项技术涉及移动机器人即时定位与地图构建,可应用于该公司的智能移动机器人等产品中。而江苏科技大学的与水下自主导航相关的SLAM专利技术许可给江苏太航信息科技有限公司,被其应用于船舶管理及水下作业等场景中。
行业许可模式:授权公开号为CN108303101B的发明专利涉及一种导航地图构建方法,其采用SLAM技术进行导航构图,为弗徕威智能机器人科技(上海)有限公司持有,后被许可给汇智机器人科技(深圳)有限公司,二者均为AI智能机器人领域的研发主体。
由此可知,在SLAM技术领域,其专利许可模式已较为典型和成熟,这也在一定程度上反映出该项技术在相应领域的应用和产业化程度较高,上述3种模式可为分研发主体进行技术转化实现价值收益提供借鉴。
4.3 专利侵权诉讼
在SLAM技术应用的各个领域中,专利侵权诉讼最为激烈的是在扫地机器人行业。2017年,全球扫地机器人霸主iRobot曾发起“扫地式”专利歼灭战[8],诸多扫地机器人领域的中小企业均被波及,被iRobot的核心专利技术围堵。只有中国台湾地区的松腾实业成为唯一全身而退的企业。通过追踪检索发现松腾实业主要依靠其在2009年在中国和美国市场提交的2件已获授权的发明专利进行反击,该项专利技术涉及在扫地机器人中利用视觉即时定位与构图技术(VSLAM,VisionSimultaneous Localization and Mapping)实现环境识别,该项专利利用惯性感测元件与视觉感测元件,以定位出移动载体在空间中的相对位置与环境特征点相对于移动载体的位置,达到状态估测的目的。可利用两种传感器的互补性,大幅减少运算复杂度,以扩增对载体的动态侦测范围,达成3D移动载体的定位。正是依托早期在SLAM专利技术方面的布局,松腾实业在中国和美国市场展开反诉,最终与iRobot达成和解,得以全身而退,保持其在扫地机器人领域全球第二的地位。由此可见,SLAM技术在扫地机器人领域的竞争已经异常激烈,而作为研发主体,尽早针对核心技术进行专利布局极为必要。SLAM专利技术侵权诉讼案例如图10所示。
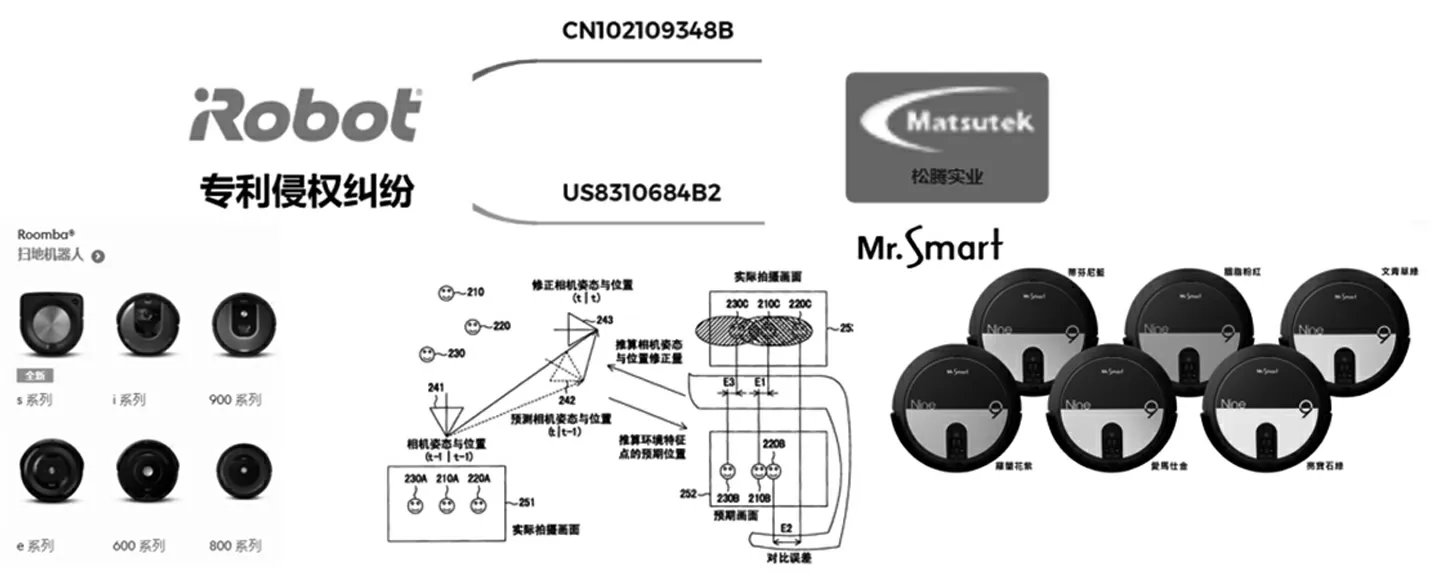
图10 SLAM专利技术侵权诉讼案例
综上可知,SLAM技术的产业化程度较高,其知识产权保护和运营模式多样,从专利质押、专利许可和专利侵权诉讼方面均反映出该项技术当前正处于一个激烈的竞争期,技术的转化速度、生活应用深度正在逐步加深,其竞争激烈程度可能会伴随申请量的急剧上涨和产业化程度的进一步增强而持续加深。
5 结束语
本文依托专利分析方法,一方面,从SLAM技术的专利申请趋势、重要申请人及研发方向探讨其发展历程、热点技术及发展趋势,表明该项技术已逐步完成产业化,正处于高速发展时期。另一方面,从专利质押、专利许可和专利侵权诉讼探讨SLAM技术领域发明专利保护运营模式,研究表明从发明专利保护和运营情况来看,其市场竞争异常激烈,而该项技术现有的发明专利保护运营模式可供部分研发主体参考借鉴。
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
防爆电机(2022年3期)2022-06-17
粮食与饲料工业(2022年2期)2022-04-27
汽车工程师(2021年12期)2022-01-18
电子制作(2019年12期)2019-07-16
小学生学习指导(低年级)(2019年4期)2019-04-22
领导决策信息(2018年9期)2018-05-24
中国知识产权(2017年10期)2017-10-31
山东工业技术(2016年15期)2016-12-01
数学大王·低年级(2016年7期)2016-05-14
