基于谐波注入的永磁电机转矩脉动抑制策略研究
2022-05-10 06:29郭建英赵宏平
中国测试 2022年4期
郭建英, 赵宏平
(1. 忻州职业技术学院机电系,山西 忻州 034000; 2. 苏州职业大学机电工程学院,江苏 苏州 215104)
0 引 言
一般而言,永磁电机转矩脉动主要由以下3个因素引起:1)齿槽转矩;2)电枢电流和反电动势中的谐波;3)交、直轴磁路不对称产生的磁阻转矩[1]。齿槽转矩是永磁电机所特有的,它是由于有槽铁心与永磁体相互作用而产生。虽然其在一个周期内的平均值为零,但是对电机运行的平稳性有着不容小觑的影响。较大的齿槽转矩会影响控制系统的控制精度,产生振动和噪声,甚至机械共振[2-4]。对于自起动永磁电机而言,起动转矩是一个很重要的参数,而齿槽转矩作为起动转矩的一部分,将直接影响电机的起动性能。对于伺服电机系统,齿槽转矩会降低电动机位置伺服的定位精度,特别在低速时更为严重[5]。电流谐波是控制电路在电流的调制过程中产生的谐波分量,它与所采用的控制策略有关。而磁阻转矩则是由于电机交直轴磁路不对称引起的,它不仅对输出转矩有贡献,同时也会引起一定的转矩脉动。因此,有必要研究永磁电机转矩脉动的抑制方法。
国内外学者针对永磁电机齿槽转矩抑制方面的研究工作主要从定子侧和转子侧分别展开。改变定子侧尺寸实际上就是改变气隙磁导分布,从而达到抑制齿槽转矩的目的;而改变转子侧则本质上是通过改变永磁体剩磁密度的空间分布,从而抑制齿槽转矩。改变定子侧的抑制措施可进一步分为:辅助槽、不等齿宽、不等槽宽、斜槽、优化槽口宽度[6-8]等。一般而言,虽然采用定子辅助槽能减小齿槽转矩,但是由于齿部开槽,它在一定程度上会降低电机的过载能力;不等槽宽和齿宽会引起额外的不平衡磁拉力;定子斜槽会大大增加工艺复杂度。改变转子侧的抑制措施也可进一步分为磁极偏移、优化极弧系数、分段错极、永磁体削角[9-12]等。采用磁极偏移虽然能够减小齿槽转矩,但是同时也会引起不平衡磁拉力;永磁体削角会增加工艺复杂度,增加成本。在电流谐波抑制方面,文献[13]通过对电压谐波的控制实现对永磁电机变流器系统中全频次低频电流谐波的有效抑制。文献[14]提出一种基于特定次谐波注入法的谐波抑制方案,即在SPWM正弦信号中注入5次、7次谐波补偿电压,进而达到降低输出电流特定次谐波含量。
本文首先推导了适用于任意相电机反电动势谐波和齿槽转矩引起的脉动转矩的通用解析表达式。然后,基于此模型,从控制的角度出发,提出通过采用电流谐波注入以补偿齿槽转矩和反电动势谐波的控制策略,分析了所需注入的电流谐波特性的一般表达式。为了验证理论分析,以一台三相12槽10极表贴式永磁同步电机为例,通过Matlab/Simulink设计了同时考虑反电动势谐波和齿槽转矩的电机模型,搭建了谐波注入的电机控制系统,最后通过实验验证了此方法的可行性。
1 电机本体模型
本文的研究对象是一台传统的10极12槽转子表贴式永磁电机,具体的电机模型如图1所示,相应的参数如表1所示。在该结构中,由于永磁体位于气隙,导致交直轴磁路电感几乎相等,因此,通常采用“id=0”控制。
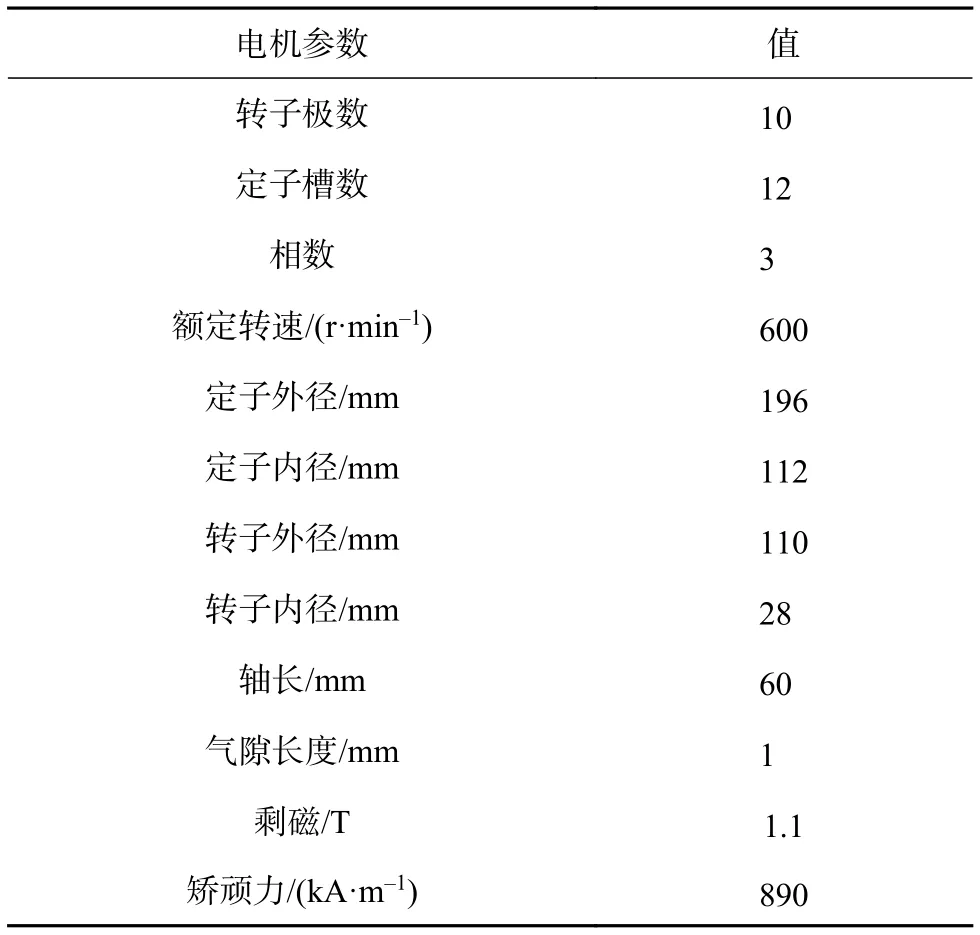
表1 电机参数

图1 10极12槽永磁电机
2 转矩脉动模型
本节内容首先推导了适用于任意相电机反电动势谐波和齿槽转矩引起的转矩脉动的解析表达式。然后,基于此模型,分析得到了所需注入的每相电流谐波特性。
2.1 反电动势谐波
一般而言,在m相永磁电机中永磁转矩的表达式为:


因此,若要通过注入µ次谐波电流以补偿公式(2)所示的脉动转矩(忽略反电动势高次谐波与µ次谐波电流之间的相互作用),则根据式(1)可得到:

同时,需满足以下条件

因此,通过式(4)便可求得需要注入的谐波电流特性,包括幅值、谐波次数和相位。
2.2 齿槽转矩
根据文献[6]可知,永磁电机齿槽转矩的表达式为:

式中:Tn——谐波幅值;
βn——谐波相位,n满足:

式中:LCM——最小公倍数;
Ns和Nr——定子槽数和转子极数。
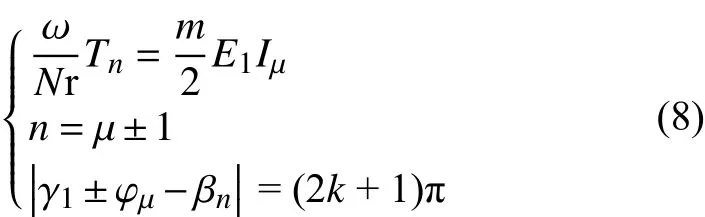
因此,若要通过注入µ次谐波电流以补偿公式(5)所示的齿槽转矩,根据式(1)可得到:

于是,当注入的谐波电流满足以下公式时,其产生的谐波转矩刚好可以补偿齿槽转矩。
3 反电动势和齿槽转矩分析
本节内容以一台3相12/10电机为例,分别分析了反电动势和齿槽转矩的谐波,计算得到了需要注入的谐波电流特性。然后,通过Matlab/Simulink设计了同时考虑反电动势谐波和齿槽转矩的电机模型,搭建了谐波注入的电机控制系统,验证了此方法的可行性。
3.1 反电动势
图2为通过有限元计算得到的相反电动势及其谐波分析。可以看到,相反电动势中除了基波外,还有3次和5次谐波。由于3次谐波不会引起转矩脉动,因此,这里只考虑5次谐波的影响。

图2 相反电动势谐波分析
根据上图分析可知,5次谐波的幅值E5和相位γ5分别为 3.23 V 和 157°,因此,再由式(4)可计算得到所需注入的谐波电流特性满足下式:

3.2 齿槽转矩
图3为通过有限元计算得到的齿槽转矩和相应的谐波分析。可以看到,该电机的齿槽转矩在一个电周期内以6次谐波为主,因此,只需补偿这一谐波分量。

图3 齿槽转矩谐波分析
根据上图分析可知,齿槽转矩基波的幅值T6和相位 β6分别为 0.63 N·m 和–47.9°,因此,再由式(8)可计算得到所需注入的谐波电流特性满足下式:

3.3 仿真研究
根据上述分析,基于Matlab/Simulink设计了考虑谐波注入的永磁电机仿真控制系统,如图4所示。具体的谐波注入控制模块在图中用红色方框表示,在进行坐标变换的时候,将所需注入的谐波同时注入A、B、C三相电流中,同时对基波和谐波进行Park反变换。可见,谐波电流的注入是在进行Park反变换的时候实现。为了便于区分,所增加的模块用绿色底纹进行高亮。且每个模块中所注入的电流谐波特性如式(9)~(10)所示。

图4 具有谐波注入的系统控制框图
图5对比了注入谐波电流前后电机稳态性能的变化,包括相电流、转矩和转速。其中,补偿前后电机的转矩脉动峰峰值从 1.5 N·m降低到了 0.5 N·m,转 速 (600 r/min) 波 动 从 ±2.5 r/min降 低 到 了±0.7 r/min。可见,采用该方法确实能够有效提升系统的控制精度。

图5 谐波注入前后电机性能对比
4 实验验证
为了进一步验证本文所提出的控制策略的有效性,对一台定子12槽转子10极三相永磁电机进行实验验证。控制器采用dSPACE 1104控制板,通过直接编译Simulink 环境下的仿真模型,生成dSPACE实验平台能够辨识的代码,建立起可在线调整各项参数的实验系统,从而实现电机性能和控制方法实验。图 6为该永磁电机在 600 r/min、5.3 N·m负载稳态条件下,谐波电流补偿前、后的输出波形。补偿谐波后,转矩脉动明显降低,而电流THD上升,且幅值有所增加,这也与前面理论分析相符合。

图6 实测转矩和电流波形
5 结束语
本文推导了反电动势谐波和齿槽转矩引起的脉动转矩的解析表达式。然后,基于此模型,从控制的角度出发,提出通过采用电流谐波注入以补偿齿槽转矩和反电动势谐波的控制策略,分析了所需注入的电流谐波特性的一般表达式。以一台12槽10极表贴式永磁同步电机为例,通过Matlab/Simulink设计了同时考虑反电动势谐波和齿槽转矩的电机模型,搭建了谐波注入的电机控制系统,最后验证了此方法的可行性。
猜你喜欢
微电机(2022年8期)2022-10-12
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2022年2期)2022-04-26
日用电器(2021年6期)2021-07-19
微电机(2019年4期)2019-05-27
汽车电器(2019年2期)2019-03-22
微特电机(2019年1期)2019-02-25
科学与财富(2017年30期)2018-01-01
科教导刊·电子版(2017年16期)2017-07-21
现代畜牧科技(2015年11期)2015-10-21