基于三维点云地图的扫地机器人智能清洁设计策略研究
2022-05-26 10:24廖铮张凌浩
设计 2022年9期
关键词:体验设计
廖铮 张凌浩

关键词:点云 三维地图 体验设计 扫地机器人 智能清洁
引言
互联网时代的大背景下,人工智能(AI)技术、物联网技术驱动产业转型和消费升级。消费级的服务机器人能够在家庭环境中胜任某些简单的工作,减轻生活压力,改善人类居住体验。采用智能服务机器人替代人类完成地面清洁劳动,其目的就是利用机器人自主定位、自主清洁的特性,解放用户的家务负担,为客户提供更优质、更舒适的生活体验。随着体验经济的发展带动新一轮消费升级,越来越多的家庭也不再满足于现有扫地机器人的体验,开始追求高品质、精细化的清洁服务,扫地机器人的竞争从提升吸尘功率、续航时间向拓展深度清洁、智能交互等方向转变。
一、研究现状
(一)扫地机器人的发展现状
1. 基本概念
扫地机器人是家庭清洁功能与服务型机器人概念的结合,是最早进入生活消费领域的智能服务机器人品类。基于现有机器人产品的概念,本文将扫地机器人定义为:以减轻清洁负担、提高生活质量为目的,在家庭环境内工作,扫地机器人的智能体现为具备一定自主行动能力、自主判断能力、自主学习能力,能够根据路径导航完成设定的清洁任务。AI(Artificial Intelligence)、物联网、智能家居等概念深植于工业制造,推动了整个社会对机器人智能服务的需求,扫地机器人成为智能家居系统的中间环节。扫地机器人的创新设计,应致力于多维度地为家居生活创造更舒适、更便捷、更健康、更安全的生活环境[1]。
2. 扫地机器人设计的发展现状
国际机器人联合会(IFR)统计指出,2015-2019 年间销售额持续增长;在 2016 年后,扫地机器人市场增速放缓。据《2020中国服务机器人产业发展研究报告》显示,技术创新、内在价值、经济环境成为驱动机器人发展的关键因素。基于产业数据及分析报告归纳扫地机器人设计的发展现状。
在产品驱动力方面,扫地机器人从早期关注吸力、续航、越障等基本功能参数,逐步向关注交互、控制、集成、识别等体验要素转变。在经历从无到有的普及阶段后,产品逐渐重视依靠体验提升来驱动消费需求。家庭清洁任务的多样化与复杂化,要求机器人具备更高的清洁效率和好的使用体验。例如云鲸拖扫一体机器人,采用双水箱基站设计以解决自动换洗拖布的使用痛点;使用磁吸更换的方式增强刷头更换的便捷性,见图1。
从用户价值驱动力方面来看,用户从只追求功能使用的价值转向更加重视情感与自我实现的价值。在繁忙的工作中,人们期望更省力轻松的生活,也希望通过更智能的清洁产品获得更好的生活体验。
而年龄、使用经验等的差异导致了用户人群细化;用户追求产品的情感价值,认可符合自身价值的品牌,选择符合自身定位的智能清洁产品,从而创造出具有独特性的家庭清洁用户场景。
(二)扫地机器人设计关注的问题
《2020中国服务机器人产业发展研究报告》中提出:能否解放劳动、提高效率、提升服务质量,是服务型机器人的内在价值基础。
对扫地机器人来说,最大程度解放用户家务劳动、提升清洁效率、提供高质量的清洁服务,就是其核心价值所在。
1. 应对复杂清洁场景的使用问题:清洁机器人在清洁地面死角方面有无可替代的优势,但受限于自身结构,不可控的噪音、碰撞、缠绕问题,在工作中对家庭成员的正常生活产生较强干扰;对毛发的处理能力与手持吸尘器相比又有着明显劣势。相比之下,清洁机器人缺乏丰富的拓展模块,独自应对家庭环境的所有复杂性。纵观其他的智能清洁产品——手持吸尘器、蒸汽拖把等产品创新层出不穷,向用户描绘了家务劳动的新场景。在复杂变化的家庭环境中,吸尘器具有的拓展性、可控性及清洁的细致程度远优于扫地机器人。体感交互的融合发展及可替模块、集成基站等系统化的创新形式也成为功能设计的重要方向。
2. 定位与地图服务的交互问题:现阶段对于如何将智能技术内化至日常清洁活动缺乏相应的研究。大部分研究从技术原理与算法应用角度展开阐述,缺乏用户体验的角度。对于产品技术升级过分关注,也一定程度忽视了购买者对机器人清洁体验的实际需求。定位能力不足、地图信息抽象且单一对使用体验有着重要影响。平面地图具有天生的信息缺陷,对高维信息的表达缺失使得在交互表达上无法提供足够的细节。
现阶段扫地机器人App地图中仍然存在大量无意义噪音;且环境中高度、形状、材质等信息仍然缺失,人眼视觉感知与 App 地图呈现效果存在巨大差异,见图2。在已有的设计尝试中,科沃斯扫地机器人 DG70与 T8使用了单目视觉摄像头与激光雷达融合的方案,在实际使用过程中,“AIVI”现阶段只停留在“提示”“标记”阶段,并不能基于物体识别实现更多功能,无法显著改善扫地的用户体验,见图3 。
从以人为中心的设计角度出发,应更多关注地图从二维升向三维的表达方式,探索更多基于多维数据的交互逻辑和使用流程。
二、三维点云地图与清洁体验构成要素分析
(一)解读点云技术
“点云(Point Cloud)”,是指通过激光雷达、单目、双目视觉摄像头等机器视觉技术进行数据采集,获取在同一空间参考系下表达目标空间分布和目标表面特性的海量点的集合。点云数据对高维的特征信息有着极强的包容性与可扩展性,适合应用于3D目标检测任务。
其中激光雷達是最主流的点云获取方案之一。如今,激光雷达SLAM(simultaneous localization and mapping)与视觉 SLAM已在扫地机器人中广泛应用,但是依靠传统单一传感器的SLAM 构建的地图中缺少语义信息[2],仍然难以适用于家庭环境中的高动态场景,基于视觉的场景识别与理解是机器人认识周围环境、提高智能化水平的关键[3]。AI 场景识别是机器视觉与深度学习的融合应用,它基于单目、双目视觉相机采集环境图像,获得当前场景中的实时位姿数据,是机器人构建环境地图的重要步骤。视觉是多级且自下而上的分析过程,其核心是由图像结构推导出外部环境结构,最终实现对外部现实世界的认知[4]。赵晓东等在《清洁机器人路径规划算法研究综述》中指出进一步研究的方向,在强大的硬件平台下,发展建立精确的环境模型信息,包括在某些场景下建立三维模型,通过多种方法融合设计新的定位及规划算法[5],如图4。
对扫地机器人来说,人工智能、地图及相关的交互体验是决定机器人好用与否的关键。通过从不同维度分析扫地机器人的特征,提炼对市场、用户、体验有决定性影响的关键要素,前瞻地图与定位驱动的体验设计研究趋势。
(二)三维点云地图的体验设计研究趋势
扫地机器人地图与定位的技术要素是其提供清洁服务的基础;而地图与人工智能(AI)的融合又将为未来体验创造更多可能性。基于以上发展趋势,机器视觉、深度学习等人工智能技术将进一步推动地图形式的变革,从信息匮乏、交互形式单一的平面地图逐步转向信息呈现多样、交互通道丰富的多维立体地图,如图5。
1.围绕三维点云硬件的趋势:传统的功能设计集中于机器人本体,实际上通过对其他产品的横向研究,脱离本体进行功能模块的构思有着更多操作上的可行性。通过挂载视觉和点云融合的硬件构成,可以帮助机器人更深入地感知和理解家庭环境,支持三维地图情感化、人性化的体验。智能清洁体验依赖于完整且丰富的地图信息,充分考虑到机器人低矮的工作特性与高视角扫描效果间的矛盾,以升降式摄像头或拆卸式扫描仪的方式创造高低搭配的建图策略,或使用户也参与扫描的过程,增强对机器人的探索欲,建立起更丰富的情绪体验。
2.围绕三维地图交互的趋势:传统扫地机器人的 App 应用只进行抽象的地图呈现,只支持一维的缩放平移操作,缺乏对环境全景式和微距式的观察视角,对家庭环境的表达呈现单调且冰冷的状态。在交互与视觉设计层面,对应功能模块进行流程和层级的设计。基于以上发展趋势,机器视觉、深度学习等人工智能技术将进一步推动地图形式的变革,从信息匮乏、交互形式单一的平面地图逐步转向信息呈现多样、交互通道丰富的三维立体地图。AI视觉识别与点云数据的融合,可以帮助机器人更深入地感知和理解家庭环境,又实现对日常行为的识别与判断[6]。在应用层面为家庭智能清洁带来精细化清扫、多层级信息、人机协同、智能交互等方面更多的可能性;在硬件层面,更全面的三维数据加深了机器人的空间理解,为机器人运行提供高精度的路线计算,完成点到点的清洁任务。
(三)三维点云地图体验洞察导出
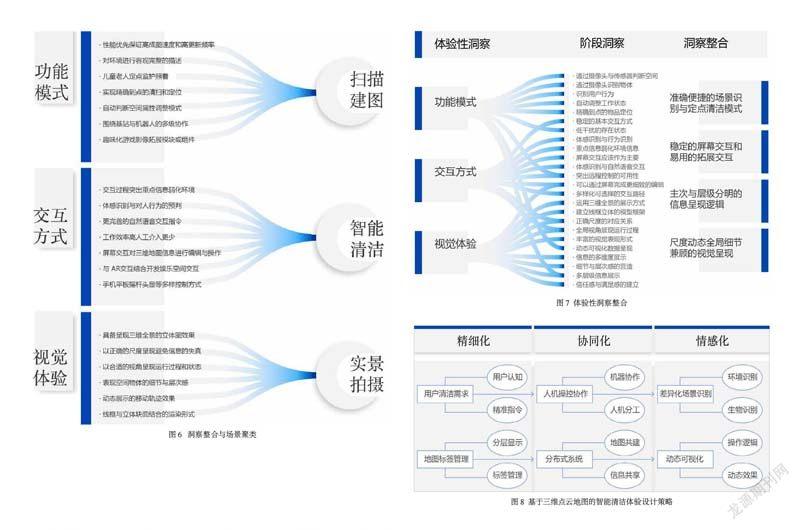
基于上述设计趋势分析与研究框架,展开三维地图使用场景的洞察聚类和转化。通过对使用经验、使用痛点、未来需求等角度的资料搜集、文献分析、用户深访,从以功能模式、交互方式、视觉体验三个角度进行整合了以下初步洞察,见图6。并在此基础上导出三个具备较高设计价值的目标场景。
洞察导出需要完成向设计策略的转化,用户体验设计的核心原则在以下方面得到应用,见图7:①功能模式设计角度:构建的 3D 地图,可以实现在建立三维环境模型的同时标记环境中的物体位置、功能标注、姿态和等语义信息、要实现与人的认知同步,就应通过定义地图节点的抽象概念和语义关系,创建包含人类空间概念实体的环境地图。
②交互方式设计角度:多层级信息可以以简洁、高效的形式呈現的原则。在交互层面,得益于点云立体表达的优势,经过三维图像后能够表现包括深度图、几何图、语义图等在内的环境数据,形式各异的地图数据更需要建立起与之对应的交互逻辑。
③视觉体验设计角度:动态变化的环境信息经过可视化处理后提供给用户。满足了用户的参与权、知情权、控制权,在实用层面更具体地引导了具备安全感与信任感的智能清洁体验。
三 、基于三维点云地图的智能清洁体验设计策略
智能是什么?智能是指机器接近人的行为方式、思维方式。智能系统的设计,即是通过提供具有合适的场景应用和产品功能的AI 解决方案,在此基础上满足用户需求并产生社会效益[7]。通过三维地图建构起家庭智能清洁系统,人的认知和机器理解的差异进一步缩减,从空间信息采集、筛选、判断、清洁任务的不同阶段,机器人能够越来越接近人的思维方式与行为方式。这种思维与行为的同步化能够建立除了清洁任务外的情感连接,更进一步带来自然和谐的生活体验。
(一)智能清洁体验设计策略构建
通过前期洞察确立了具体的体验设计方向,基于三维点云地图在多维信息采集与视觉呈现方面的优势,构建囊括精细化、协同化、情感化三个维度的智能清洁体验设计策略,见图8。
1.精细化策略
(1)用户清洁需求的精细化:提供精确到物品的高精度定位,为扫地机器人全空间的“点对点”清扫奠定基础。精细化清扫,即强调准确打击某个点的同时尽量降低对周边的影响,对于清洁机器人来说该原则同样适用。用户对于“只扫某个区域就好”的使用需求,并不需要机器人从出发就开始清扫,而是以安静的状态出发,走直线以最短距离到达标定区域,再开始清扫。例如:去主卧床底下擦地、去卫生间擦水,去南阳台清洁猫窝等精确到语义属性的定点清洁。
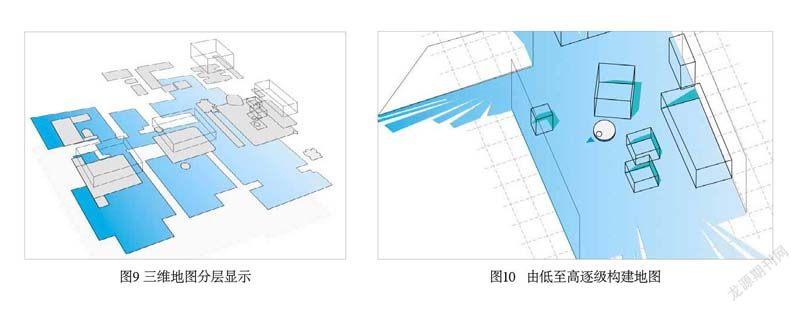
(2)地图标签管理的精细化:SLAM系统在构建地图时将几何信息与语义信息融合,利用语义信息辅助定位,从而准确地感知并适应场景[8]。多次扫描的训练后,能够逐渐识别各类家具物品,确定他们的固定边界,对环境中家具种类、功能、使用频率等信息进行区分,自动为他们添加标注。一方面这些物品将作为标定行驶轨迹的路标辅助机器人运行;另一方面能够为精确清扫提供标志物,并由此支持文字标注到语音控制的转化。在显示方式上,以图层叠加的形式呈现不同类别的标注,合理排列并控制单次信息量,见图9。
2. 协同化策略:通过地图共建、信息共享,利用三维点云地图的特点在机器之间、人与机器间建立起更高效、更整体的协作系统。
(1)“分布式”地图系统构建协同化:“分布式”地图系统中,展现给用户的是统一的地图整体。系统拥有多种通用的物理和逻辑资源,可以动态的分配任务,分散的地图资源通过网络实现信息交换。
由于单个机器人的建图与识别效率有限,需要由低至高逐步构建地图阶层,见图10。更新的地图信息能够经由系统网络共享,实现内部快速迭代,不同机器人之间只需通过同一份地图来完成信息的理解和判断。设备间通过环境认知的一致性提升服务效率,降低错误率。
(2)人机操控构建协同化:智能清洁系统需要人和机器人的协同运作——信息的采集和分析、信息的计算、指令的执行和反馈。通过对场景任务的解构,人作为命令主体,机器人则是执行主体。以这种形式赋予产品可用性,进而积累场景下的数据,使用户可以通过地图界面获取机器人状态及环境信息,实现对机器人的全面控制。以“人在环中”的形式拓展人机交互的空间,通过优化交互设计来弥补自然语言交互技术的不足[9]。
3. 情感化策略:情感化设计帮助在形式化用户体验和情感生成之间产生联系[10]。情感化一方面源于动态自然的交互方式,另一方面源于简单高效的使用体验。创造人机间“心有灵犀”的场景是创造人性化的前提。
(1)差异化场景识别实现情感化:人体动作识别是从给定的动作序列中理解人的行为,行为识别的目的就是根据传感器触发的序列来推断居民当前正在进行哪一种日常行为[11]。从点云中提取的三维人体骨架对于差异化的场景识别具有重要意义[12]。差异化的场景识别要求机器人能够记录并判断包括人的轮廓、动作、语音,指导自身工作。对人体行为的识别感应使机器人在工作中兼顾用户的生活方式与认知习惯,“四两拨千斤”,针对性地调整工作模式,降低存在感,提高工作效率。而另一方面,识别宠物的固定活动区域,避让不可触碰的区域,清理食物残渣;及时发现宠物引发的突发状况,如撕碎纸巾、打翻水瓶等,识别、拍摄并向用户发送报告。
(2)动态可视化实现情感化:三维地图作为屏幕交互的第一层界面,以和谐的交互逻辑和自然的动态效果能够有效提升使用体验,传递情感化的价值。例如在扫描建图阶段,更快输出密度高、噪声低的地图,能够以较快速度勾勒空间的深度和高度信息。例如强调与实景画面融合的低面网格效果,能够直观反映已扫描的区域及大致的环境形态。对于建图过程而言,低面风格能够营造充足的动态感,随着扫描推进网格逐步延伸,能够向用户传达积极的信息反馈。以清掃过程为例,通常是用户非在场状态,但系统应该通过动态交互设计“让清扫优化过程触手可得”,例如,通过渐变色的App动效、粒子状的渲染特效等方式,将家庭环境质量的变化呈现给用户。
(二)智能清洁概念系统架构
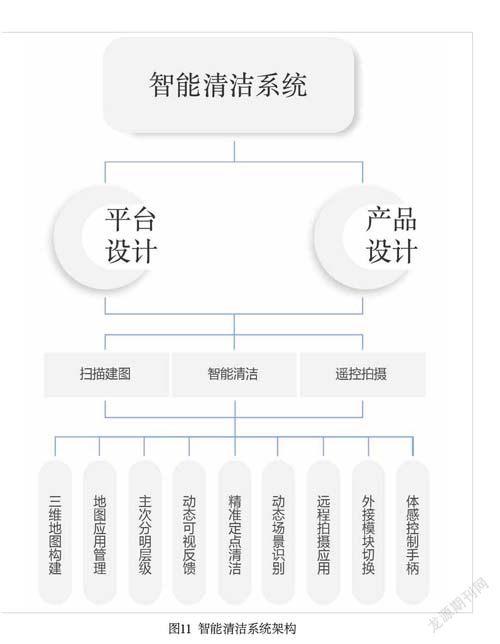
基于三维点云地图在多维信息采集与立体视觉呈现方面的优势,提出自上而下囊括产品硬件、交互方式、视觉表现的设计系统架构,见图11。针对体验思维主导下的家庭清洁机器人开发产生的诸多需求,通过以用户为中心的设计方法,为智能清洁系统构建提供可行思路与前期概念。
具体到交互环节,则应包含了从清洁场景提炼出的细分需求:①保留符合用户偏好的传统交互方式如屏幕交互和物理逻辑等;②不同用户对新交互形式的接受程度和探索欲望不同,应提供体感控制与语音控制的拓展选项;③通过自然的交互形式采集环境/人体数据,维持家庭基本健康安全的需求;④选择合适的显示载体,以三维动画形式对满足用户对动态数据的感知需求等。
结语
近年来对于扫地机器人的研究,逐渐开始注重智能技术、交互方式与用户情感之间的关联。对扫地机器人清洁体验的研究思维,本质就是以人为本的设计思维。面对单一机器人或单一功能模块难以应对复杂性与特殊性的现实状况,3D视觉的应用还是要从具体场景的使用诉求和成本等多重因素共同考虑。构建“三维点云地图”与扫地机器人家庭清洁融合的系统,是从体验设计的角度对当前机器人应用研究的新探索,勾勒未来基于机器人服务的智能家居系统的发展轮廓。
利用三维点云地图数据精确、表达形式丰富的特征,开拓新应用场景与新交互方式,为智能家居系统融入更多积极的的情绪体验。通过构建信息共享系统与机器人工作联动机制,完成家庭清洁的协同化调度;服务机器人共享了更强的分析能力、更快的建图能力、更精细的场景识别能力;依靠语义地图,智能机器人能够实现室内精确移动、精细清洁、物体跟踪、安全巡航等多重功能,最终为用户打造高效、互联、自然、系统、多维、安全的家居生活体验。
猜你喜欢
设计(2017年18期)2017-11-09
中国绿色画报(2017年10期)2017-10-12
艺术研究(2017年1期)2017-07-05
美术界(2017年2期)2017-06-22
建筑建材装饰(2017年1期)2017-05-20
艺术科技(2016年11期)2017-05-05
北方文学·中旬(2016年10期)2017-02-10
美与时代·城市版(2016年11期)2017-02-04
艺术科技(2016年9期)2016-11-18
人间(2016年27期)2016-11-11