合成双射流对下游声压级影响试验
2022-06-13 02:17刘志勇何彬华梁锦敏罗振兵
气体物理 2022年3期
刘志勇, 何彬华, 梁锦敏, 张 兆, 罗振兵
(1. 中国空气动力研究与发展中心, 四川绵阳 621000; 2. 国防科技大学空天科学学院, 湖南长沙 410073)
引 言
合成射流又被称为零质量射流, 是一种重要的主动流动控制技术, 在抑制流动分离[1-3]、 促进掺混[4-5]和强化换热[6-8]等方面有着广泛的应用. 常见的合成射流激励器有扬声器式、 活塞式和压电陶瓷式等多种形式. 由于合成射流技术无需气源, 具有体积小、 质量小、 结构简单、 响应快等优点, 利用合成射流进行流动控制的研究已经开展了很多. 赵志杰等[9]在固定翼无人机上安装合成射流激励器, 用以控制无人机的偏航和滚转. Deng等[10]利用合成射流激励器对LED灯进行散热, 具有比传统风扇散热系统体积小、 效率高的优点. 在施加合成射流进行流动控制时, 除了抑制分离、 加强换热等首要目的外, 人们也越来越关注合成射流激励带来的噪声问题.
当前, 已有许多学者开展了合成射流对噪声的影响研究. Bhapkar等[11]在利用合成射流进行冲击平板散热的研究中发现, 选择合适的激励器出口直径和驱动频率, 可以实现较高的射流速度和较低的噪声水平. Lasance等[12]从换热和噪声方面对比了合成射流激励器与标准风扇, 发现在40 cm2以下合成射流激励器占优. Vladimir等[13]采用数值模拟的方法研究了合成射流对翼型噪声辐射的影响, 发现当有阵风时, 合成射流激励能有效移除翼型后缘处噪声中阵风频率的较高谐频部分, 但对阵风诱导的前缘噪声没有实质影响. 杨党国等[14]利用合成射流对开式空腔的气动噪声进行抑制, 发现在跨声速下有一定的抑制效果, 在超声速下抑制效果几乎没有.
为了使合成射流技术更好地应用于工程实际, 对合成射流技术的研究必然会延伸到其对噪声的影响方面. 为此, 本文开展了合成双射流对下游声压级影响的风洞试验研究, 通过对比施加合成双射流激励前后机翼表面的声压级变化, 探索合成射流控制对下游噪声的影响.

1 风洞试验
1.1 试验模型
试验模型为一段机翼, 采用了主翼加襟翼的两段翼形式. 机翼的总弦长为200 mm, 展向长度为200 mm. 主翼长度占机翼总长的70%, 襟翼长度占总长度的30%. 襟翼预先向下偏转了15°. 为了减小支撑装置对襟翼表面流动的干扰, 采用横向支撑的方式将模型固定在风洞的侧壁支撑机构上,图1给出了模型在风洞中的照片. 由于在模型加工过程中出现了沟通偏差, 原设计的模型5°后掠角变成了5°侧滑角, 导致模型的堵塞度过大, 也因此切除了两侧为抑制翼端流向涡而设计的挡板, 只保留了支撑法兰附近的小部分.
在主翼的后缘附近沿展向分别在y/c=25%, 75%处布置了两个合成双射流激励器, 见图2. 其中, 坐标系定义为x方向为流向,y方向为展向,c为弦长. 合成双射流激励器是国防科技大学罗振兵教授在传统合成射流激励器的基础上改进提出的[15], 有两个腔室和两个出口, 能量利用效率较高. 激励器单个出口的尺寸为40 mm×1 mm, 长边与主翼后缘平行, 短边占总弦长的0.5%, 同一激励器的两个出口之间的距离为4 mm. 激励器采用了与机翼一体化的设计,图3展示了合成双射流激励器的安装方式和位置, 并展示了单个合成双射流激励器的可拆卸部分. 激励器采用压电陶瓷作为驱动单元, 铜片作为振动膜片. 在试验中, 以正弦电压信号对激励器进行驱动.

图1 模型照片Fig. 1 Photo of the model
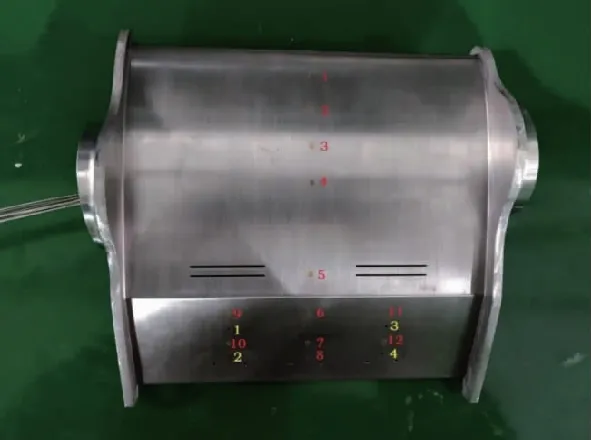
图2 模型上表面Fig. 2 Suction side of the model

(a) Installation

(b) Removable part
模型上还布置了静压和脉动压力测点. 在y/c=50% 的平面内沿机翼上表面从前到后布置了8个静压测点, 各静压测点的编号见图2中的红色标记, 其相对位置见表1. 在襟翼上y/c=25%, 75%的平面内, 即激励器的正下游, 又各布置了2个静压测点, 其位置分别与中心剖面的6, 7号测点对应. 此外, 在襟翼上y/c=25%, 75%平面内静压测点的下游, 还各布置了2个脉动压力测点, 各测点的编号见图2中的黄色标记, 其相对位置见表2.
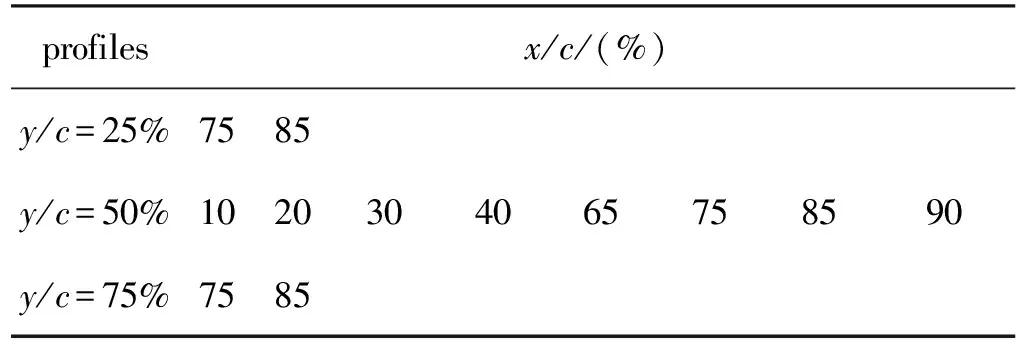
表1 静压测点位置

表2 脉动压力测点位置
1.2 测试技术与设备
试验中分别采用了荧光油流显示[16]、 静压测量和脉动压力测量技术. 通过油流显示获取模型上表面的基本流动情况, 通过静压和脉动压力测量获得合成双射流对下游流动的影响. 在试验中采用了阶梯变攻角和连续变攻角两种运行方式, 分别模拟静态和动态过程.
试验中, 通过DTC Initium测压系统获取模型表面的静态压力数据, 通过Kulite脉动压力传感器和DEWETRON采集系统获取襟翼上表面的压力脉动. 其中, 动态压力的采样频率设为20 kHz.
试验在中国空气动力研究与发展中心高速所的FL-21风洞中进行. 该风洞是一座半回流暂冲式亚跨超声速风洞. 试验段横截面尺寸为0.6 m×0.6 m, 长度为1.775 m. 亚跨声速试验时两侧壁为实壁, 上、 下壁为开有60°斜孔的开孔壁, 开孔率为4.24%, 壁板扩开角0.4°.
1.3 数据处理方法
(1)
(2)
(3)
(4)
重复性试验结果表明, 在所有攻角下, 静压系数的相对误差不超过6%, 声压级的误差普遍小于0.3 dB. 这说明来流条件控制得很好, 对声压级结果影响很小.
2 试验结果与讨论
2.1 基本流动情况
来流速度为Ma=0.4, 基于来流速度和弦长的Re=1.7×106. 采用固定攻角的方式分别获得了α=0°, 2°, 6°和10°时模型上表面的油流图谱. 为了便于观察, 采用了红-绿-红相间的涂油方式. 各攻角下的油流图谱见图4. 总体而言, 主翼上的流线比较平行, 流动较为简单, 襟翼上的流线弯曲、 汇聚, 流动较为复杂, 存在分离和旋涡.
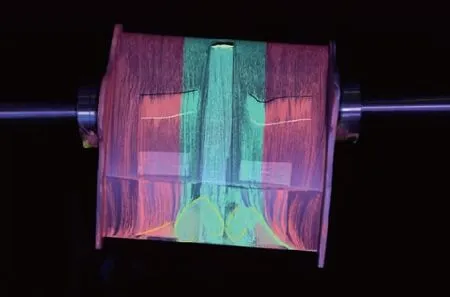
(a) α=0°
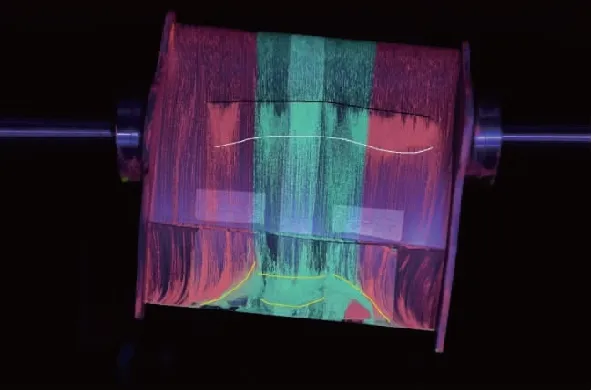
(b) α=2°

(c) α=6°
(d) α=10°
试验采用了自由转捩的方式. 当攻角较小时, 主翼的中段有一个较为明显的粒子聚集带, 见图4(a), (b)中黑线和白线所标示区域. 这表明该处可能存在一个分离泡, 黑线标示了分离位置, 白线标示了再附位置.α=0°时, 由于遮盖中间测压孔的锡箔纸前端被吹起, 起到了转捩带的作用, 使来流提前转捩为湍流, 因此中间区域没有分离泡, 也就没有明显的粒子聚集.
图4中还用黄线标示了旋涡的轮廓. 襟翼上的涡结构具有一定的对称性, 随着攻角增大中间区域的涡结构逐渐向两侧和上游发展, 两侧的涡结构逐渐收缩. 结合油流图谱和脉动压力测点的位置, 可以得出: 1号脉动压力测点处主要为附着流, 4号脉动压力测点处主要受中间区域的旋涡结构影响. 由于2, 3号脉动压力传感器在试验中出现了异常, 本文只给出了1, 4号脉动压力测点的结果.
图5给出了1, 4号脉动压力测点处的噪声功率谱随攻角的变化情况. 其中, 低频段的两个稳定峰是工频干扰, 对应基频50 Hz和倍频100 Hz, 分析时只考虑中高频部分. 从图中可以看出, 1号测点处的功率谱形态基本相同, 这与其一直是附着流的状态是一致的. 随着攻角增大, 其峰值频率略微升高, 由700 Hz左右增加到800 Hz左右. 4号测点处的功率谱形态随攻角增大发生了明显变化, 由小攻角下的双峰(峰频分别在700 Hz和1 100 Hz左右)逐渐转变为大攻角下的单峰(峰频在1 100 Hz左右), 较低频率的峰逐渐消失. 这与该处旋涡结构的变化有关.

(a) No.1 measuring point
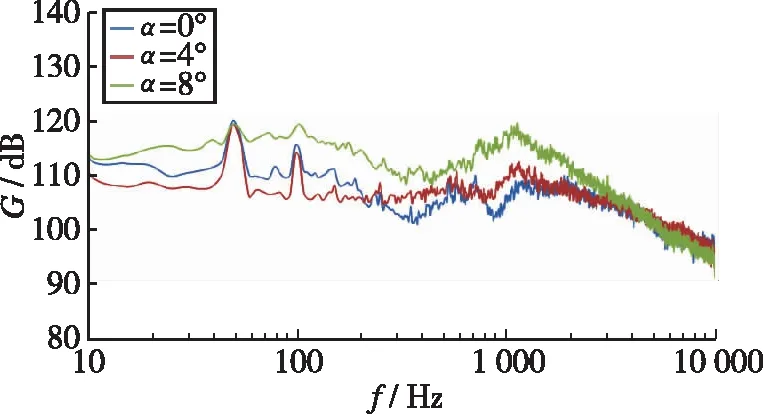
(b) No.4 measuring point图5 噪声功率谱随攻角变化Fig. 5 Variation of noise power spectrum with angle of attack
2.2 静态过程控制结果
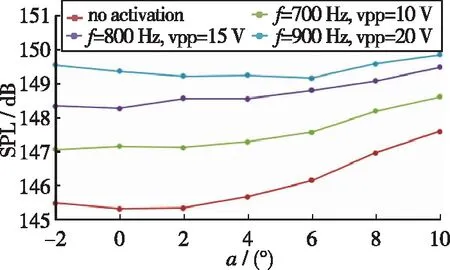
采用阶梯变攻角的方式模拟静态过程, 开启合成双射流激励器, 待流场稳定后测量静压和脉动压力. 静压测量结果表明, 合成双射流对下游平均流动的影响很小. 通过改变合成双射流激励器的激励频率和电压, 获得了控制参数对下游声压级的影响.图6给出了没有激励以及不同激励下的声压级随攻角变化情况. 可以看出, 随着攻角增大, 襟翼上的声压级升高. 对于1号测点, 激励越强该处的声压级越高, 合成双射流增大了噪声水平. 对于4号测点, 声压级在α>4°后有明显升高. 但当激励为f=700 Hz, vpp=10 V时, 在大攻角下(α=8°, 10°)的声压级比没有激励时低, 表明噪声水平被抑制, 此时控制是有利的.
(a) No.1 measuring point
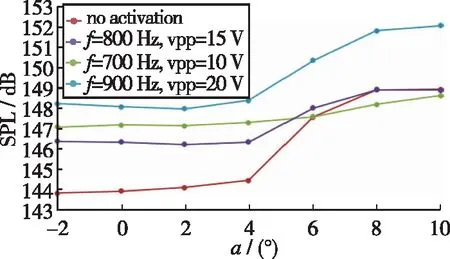
(b) No.4 measuring point图6 激励对声压级影响Fig. 6 Effect of actuation on SPL
对于1号测点,α=0°时700 Hz的激励增加的声压级幅度较大,α=8°时700 Hz的激励增加的声压级幅度明显减小, 而800 Hz的激励增加的声压级幅度仍较大. 结合基本流动情况的噪声功率谱(见图5(a))分析, 可以得出初步结论: 对于附着流, 在其峰值频率附近激励会明显增大其声压级. 因此, 在施加控制时要尽量避开这一情况. 对于4号测点,α=0°时700 Hz的激励(与较低的峰频接近)增加的声压级幅度很大, 甚至超过了800 Hz的激励, 而α=8°时700 Hz 的激励反而减小了声压级. 结合基本流动情况的噪声功率谱(见图5(b))分析可以得出: 对于受旋涡结构影响的区域, 在其消失的峰频附近激励可以减小声压级.
图7分别给出了4号测点在α=8°时的噪声功率谱以及声压级随攻角的变化情况. 可以很明显地看出, 施加激励后噪声功率谱上有尖刺形的基频和倍频峰, 在f=700~2 100 Hz范围内, 随着激励强度增大声压级有所降低. 当α≥8°时, 激励降低了声压级, 但降幅受激励强度的影响不大. 因此, 可以得出初步结论: 在受涡结构影响的区域降噪, 激励频率将是关键因素.

(a) Noise power spectrum at α=8°

(b) Total SPL图7 激励强度对声压级影响Fig. 7 Effect of actuation strength on SPL
2.3 动态过程控制结果
采用连续变攻角的方式模拟动态过程. 模型做俯仰运动, 攻角以不同的速率从0°变到10°, 稳定3 s后再以同样的速率从10°变回0°. 当模型的攻角变到指定角度(10°或0°)时流场还未稳定, 风洞控制系统会调节一段时间使得流场稳定. 本文只考虑风洞进行流场调节前的模型做俯仰运动的过程.
试验中采用了3种攻角速率, 分别为1, 2, 4 (°)/s.图8给出了4号测点在不同攻角速率下的声压级变化情况. 可以看出, 4 (°)/s时的变化情况与其他两组有明显不同. 在上仰过程中,α=8°后声压级才会明显升高, 而在其他两个攻角速率下则是α=5°后就有明显的升高; 在下俯过程中,α=4°后声压级才会明显降低, 而在其他两个速率下声压级明显降低的角度是α=7°. 俯仰速率越大, 噪声迟滞性越明显.
图9比较了在不同俯仰速率下激励对噪声水平迟滞特性的影响. on表示有激励, off表示无激励. 激励信号为f=700 Hz, vpp=10 V. 对于1号测点, 开启合成双射流后噪声水平提高了1~2 dB, 其迟滞特性没有明显变化. 对于4号测点, 在小攻角下, 激励提高了噪声水平; 在大攻角下, 噪声水平改变不明显; 在3种俯仰速率下, 激励都减弱了噪声水平的迟滞性. 对于像4号测点处受涡结构影响的流动, 由于攻角变化影响涡结构的发展, 合成双射流激励对噪声水平的影响表现出与攻角有关.

图8 俯仰速率对声压级迟滞性影响Fig. 8 Influence of pitching rate on hysteresis of SPL

(a) 1 (°)/s at No.1 point
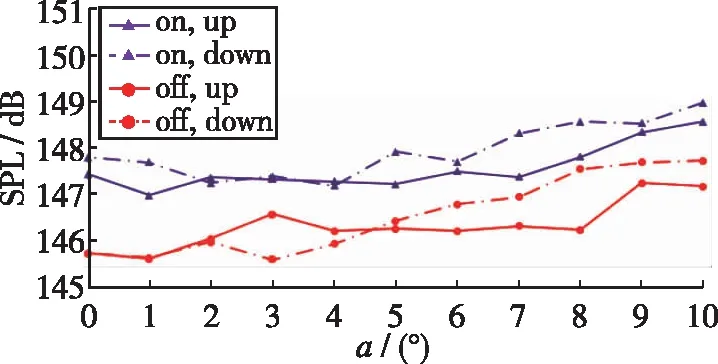
(b) 2 (°)/s at No.1 point

(c) 1 (°)/s at No.4 point

(d) 2 (°)/s at No.4 point
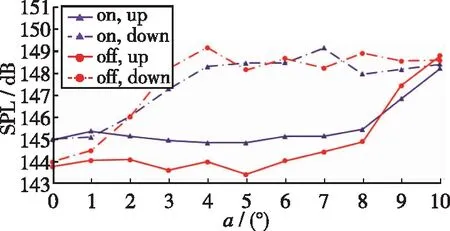
(e) 4 (°)/s at No.4 point图9 激励对声压级迟滞性影响Fig. 9 Influence of actuation on hysteresis of SPL
图10比较了不同激励强度下噪声水平的迟滞特性. 其中, 激励频率均为f=700 Hz. 对于1号测点, 随着激励增强, 噪声水平升高, 迟滞特性没有很明显的变化. 对于4号测点, 随着激励增强, 小攻角下的噪声水平有所升高, 大攻角下的噪声水平变化较小, 在某些攻角下噪声水平有所降低, 迟滞特性在中等激励下略有不同.

(a) No.1 measuring point
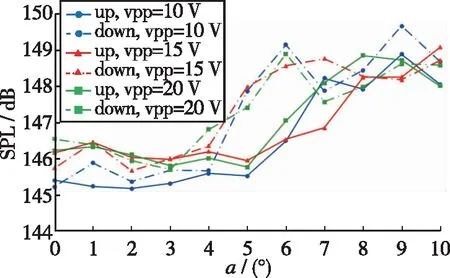
(b) No.4 measuring point图10 激励强度对声压级迟滞性影响Fig. 10 Influence of actuation strength on hysteresis of SPL
图11比较了4号测点在不同运动过程中激励对噪声水平的影响. 激励信号的电压均为vpp=20 V. 可以看出, 在小攻角下, 激励均增大了噪声水平; 在大攻角下,f=700, 800 Hz的激励减小了噪声水平. 当α=8°时, 在上仰过程中f=800 Hz 激励的噪声水平最小, 而在下俯过程中f=700 Hz激励的噪声水平最小. 因此, 抑制噪声的最佳激励与模型的运动历程有关.

(a) Pitching up

(b) Pitching down图11 不同运动过程中激励的影响Fig. 11 Influence of actuation with different pitching motions
3 结论
利用油流显示和脉动压力测量技术, 基于两段翼模型研究了合成双射流对下游声压级的影响. 在相同激励下, 合成双射流对噪声的控制效果与下游的流动状态直接相关. 基于本试验的测量结果, 获得了以下结论:
(1)对于附着流, 在其峰值频率附近激励会明显增大其噪声水平; 对于受旋涡主导的流动, 恰当的合成双射流控制可以降低噪声水平, 激励频率较为关键.
(2)在俯仰运动过程中, 俯仰速率越大, 噪声迟滞性越明显. 对于附着流, 激励增加了噪声水平, 但不改变其迟滞特性; 对于受旋涡主导的流动, 激励对噪声水平的影响与攻角有关, 能够减弱噪声水平的迟滞性, 激励强度对迟滞特性的影响较小.
(3)抑制噪声的最佳激励与模型的运动历程有关.
致谢感谢杨可工程师在脉动压力测量方面给予的帮助, 感谢荣祥森高级工程师在模型运动控制方面给予的帮助.
猜你喜欢
建材发展导向(2022年20期)2022-11-03
建材发展导向(2021年15期)2021-11-05
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
宇航总体技术(2019年5期)2019-10-11
兵器装备工程学报(2019年7期)2019-08-13
演艺科技(2019年4期)2019-03-30
汽车零部件(2018年8期)2018-09-06
振动工程学报(2017年5期)2018-03-05
计算机辅助工程(2017年4期)2018-02-01