
基于物联网的电力机械设备巡检抢修智能决策
2022-06-25 01:29杜维柱张晓华武宇平薛文祥
机械与电子 2022年6期
杜维柱,张晓华,武宇平,薛文祥,卢 毅
(1.国网冀北电力有限公司电力科学研究院,北京 100045;2.国网冀北电力有限公司,北京 100053)
0 引言
随着我国步入快速发展时代,用电量呈直线上升状态,城镇化的扩张导致电网规模越来越大,电力也成为了整个社会生产的根本,电力稳定供给是社会经济发展的大前提。在复杂环境中运行的电力设备随时都可能因天气、温度和野生动物攻击等因素出现故障,引起电网故障供电失效,这样不仅给生活带来不便,还会影响当地的生产力,造成经济损失;同时电力设备运行老化、设备零部件出现异常,都会造成电网运行故障。引起故障的机械设备主要指变压器,在电网系统中处于中间环节,一旦产生损坏将会直接影响整体供电。巡检主要工作是检查变压器在运行时状态,评判设备当前情况,据此保证设备的正常运行,以往电力巡检都需要完全依靠人工完成,但主观经验评估、纸质记录经常出错,且效率极低。完全依靠人工巡检已经不能满足电力机械设备巡检的工作需求,需要通过技术革新,用机械代替人力劳动,利用科学技术进行合理抢修决策,最大程度减少因故障带来的损失。
高兆丽等[1]根据不同故障情况、所需要抢修物资,构建综合抢修资源分配模型,使抢修人员完成多方面协调式抢修,利用多种群协同进化机制对传统人工蜂群算法进行改进,区分出故障率高低,实现抢修优化统一调度决策。马瑞等[2]结合设备负荷多变性、抢修时间限制条件,提出考虑负荷时变性的配电网故障抢修恢复策略。以变压器最大负荷价值为目标重构网架,采用二进制粒子群算法求解模型,分析抢修与设备恢复间交替关系,协同求解直到得出故障抢修顺序。
上述方法都没有考虑到设备自生健康指数对抢修工作的影响,无论大小故障,都会被加入到抢修决策序列中,增大了计算耗时。因此,本文提出一种基于物联网的电力机械设备巡检抢修智能决策方法,根据物联网运行的不同层面构建了智能巡检架构,用来采集的设备当前状态信息,确定设备健康指数;随后采用模糊分析方式,对因素间重要性进行定量比较,构建三角模糊方程,得出评估系数指标,确定抢修决策结果。
1 基于物联网的电力机械设备巡检分析
1.1 物联网架构
物联网是在互联网基础上,以信息为媒介人物交互的网络技术,根据射频识别出众多感知设备,完成实际物体与网络之间的交互连接,获取目标当前状态信息[3]。在网络层面中放置不一样的感知设备,采用与之对应的通信网络,即可完成数据信息传递方便进行协同处理。物联网技术从诞生以来发生了很大的技术变革,从初始的射频技术到现在的无线通信网络,物与物之间不可交换到物与物甚至人与物之间的信息都可以交换。
基于物联网的电力机械设备巡检,是指通过物联网中的感知设备,得到变压器的检测信息,通过网络对变压器信息进行传输和加工,实现变压器运行中设备状态采集、状态分析,为故障抢修等工作提供决策基础[4]。文本使用的物联网为3层结构,架构如图1所示。

图1 物联网系统架构
感知层是整个物联网系统中的第1层,在该层面中根据不同的传感器、射频识别、GPS等装置来识别电力机械设备,进行数据采集以及控制。网络层主要是利用互联网、无线通信技术,将感知到的信息精准分送至应用层中,完成数据信息传递管控。应用层是系统中最上面的1层,根据感知数据来实现巡检机器人自动控制,完成数据采集、设备异常分析和抢修决策等功能[5]。
基于物联网的电力巡检机器人实物如图2所示。本文主要利用多种传感器采集巡检机器人运行数据,包括光电传感器、超声波传感器与倾角传感器,这3种传感器的参数如表1所示。

表1 传感器参数

图2 电力巡检机器人实物
对所有传感器数据进行融合处理,传感器的融合准则采用“或”准则和“与”准则结合。
各传感器将检测到的信息处理成逻辑值作为局部处理结果,送入融合中心,由融合中心按一定的布尔逻辑准则进行表决融合, 得到关于目标的综合判决。融合过程的具体描述为
Y(i)=A(i)B(i)+C(i)
(1)
i为时间变量;A(i)、B(i)、C(i)分别为超声波传感器、光电传感器、倾角传感器的检测结果。
建立电力巡检机器人的参考质心轨迹,机器人动力学模型为

(2)
Jx、Jy、Jz为机器人位置坐标;ωx为机器人动力学的线性参数;ωy为笛卡儿运动根据参数;ωz为机器人的惯性力矩参数;m为电力巡检机器人质量。
采用多传感器信息融合方法可以提升电力巡检机器人对于外界的感知能力,结合机器人动力学模型设计电力巡检机器人自动控制流程,具体如图3所示。

图3 电力巡检机器人自动控制流程
在障碍物识别过程中,融合超声波与光电传感器等同类传感器数据,可精确定位障碍物。在此基础上,将机器人倾角传感器检测到的机器人侧倾角信息融合进来,保证不因外部环境因素的影响而出现避障决策失误的问题,提升电力巡检机器人工作效率与质量,在所有巡检任务完成之后结束机器人巡检工作。
1.2 电力机械设备状态评估
根据国家电网指定的设备评分标准,通过物联网线上巡检、历史数据等,对变压器进行各项指数评估。以往对变压器的评估范围只是针对整体设备,并不包括细小零件,而且只能采用人工评判的方法,导致评估结果不精准[6]。本文利用基于设备健康指数的方法完成评估,随着线上监测技术的发展,该方法已成为主流。研究结果表明,设备健康指数与故障率之间有负指数关系,表示为
λ=K×e-C×H
(3)
H为变压器的健康指数(heath index),用来描述设备的运行状态,取值范围设置为0~100;K为设备指数的比例系数;C为曲率系数;λ为设备故障率,故障率取值区间为0~1。
凡是2年以上的设备系数,皆可通过反演计算求得K和C,即
(4)
P为发生故障的概率;N为设备总数;i为设备类型;n为设备类型数量;Ni为同一类型的设备总和;li为设备i的故障率。
在K与C不存在实根的情况下,使用非线性求解中的二乘算法(GS)进行计算。
不同区域内电网工作模式、网络结构、自然因素和抢修人员能力各有不同,这样不仅提高了设备的复杂程度,还需根据这些因素的实际情况选取合适的K、C值[7]。
2 电力机械设备巡检抢修智能决策
2.1 抢修决策判断模型
影响设备抢修的因素有很多,分为可量化和不可量化因素,通常采用定性分析方式,评估结果存在模糊性,准确程度需要科学考量。依据显示需求和设备特征,逐层分析各层面的影响因素,整合若干种抢修方式划分为不同方案属性,为抢修方案提供科学依据[8]。将抢修方案依据层次分析法划分为目标模块和规则模块、措施模块,其中包含决策的多种抢修方案。从设备的安全性、稳定性和经济层面入手,考虑设备的缓冲时长、对电力功能的影响、维护费用及损失等因素,设计抢修方式决策的结构模块,如图4所示。
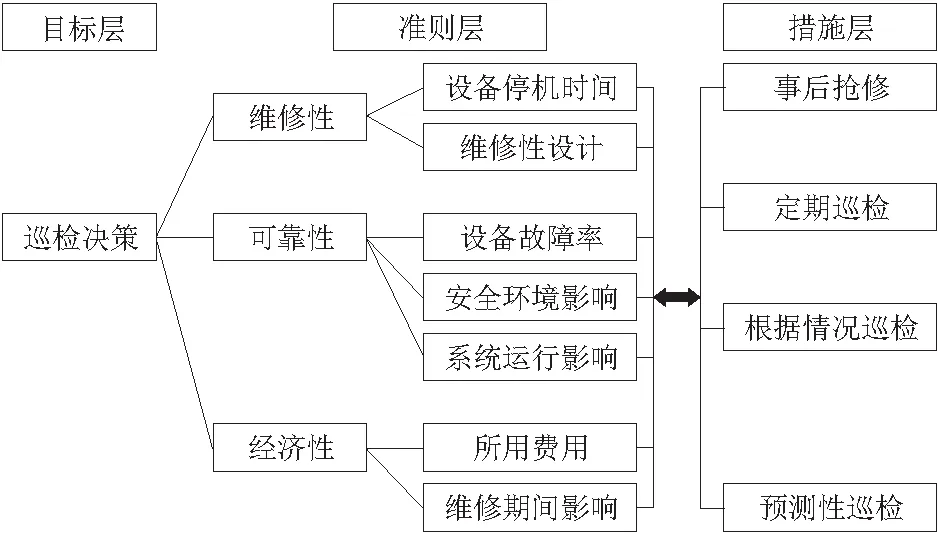
图4 抢修决策模块
(5)
式(5)被叫作“模糊互补”决策方程,将2个方案的规则的重要度[9],采用如表2所示的标度进行定量分析。

表2 各决策标度

据上述标度定量,得出互补模糊决策矩阵为
(6)
2.2 抢修决策因素权重确定
使用模糊分析法解决抢修方式综合决策中3个问题:评价各因素的重要度,构建三角模糊方程;对三角模糊方程实行一致性转变,得到新的方程;使用平均求和算法,通过式(7)得到各评估系数权重值,即:
(7)
(8)

计算上述构成三角模糊权重向量Z=(wl,wm,wh),选择平均值作为评估系数指标,其权重方程为
(9)
2.3 最优抢修决策

根据4个模糊判断矩阵,利用式(10)结果得出每个矩阵中单一因素的决策排序向量,即
(10)
权重排序计算结果为

[0.253 4 0.204 9 0.289 4 0.252 3]⊕

(11)
在不同效能因素基础上,对变压器抢修措施的权重分配结果如表3所示。

表3 抢修决策权重取值分析表
不同的效能因素可以直接决定权重的影响因素,因此由效能因素构成的评判矩阵为

(12)
将物联网采集到的实际数值代入式(12),即可明确当前的设备故障危险等级,完成智能抢修决策。
3 仿真实验
3.1 实验环境
为了进一步验证本文方法能够在变压器发生异常情况时,有效决策出抢修方案,在仿真实验环节中以规格110 kV、50 MVA变压器为例,根据评估设备状态警示结果进行抢修决策,抢修人员将通过故障点完成决策,变压器负荷点、故障点分布图如图5所示。
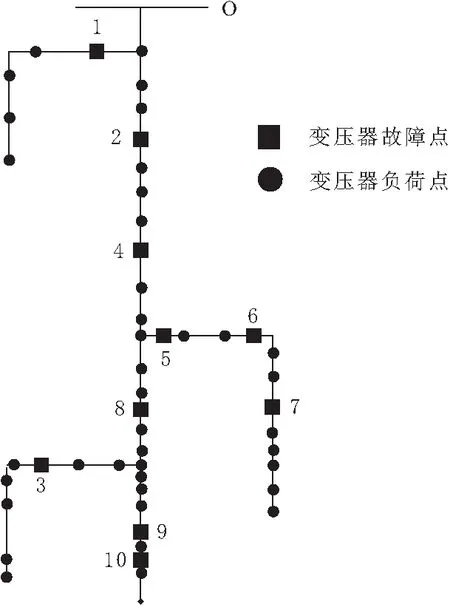
图5 电力机械设备节点状态
如图6所示为该电力机械设备故障历史数据,根据式(1)得出故障率为λ(t)=0.027e0.14t。

图6 电力机械设备故障率分布曲线
假设所检修的电力机械设备投运时间为30 a,实验过程中进行抢修决策测试,根据对设备检修的故障种类,设置每种故障率占标准成本的比例系数。变压器发生故障时,如果抢修的费用远超过换1个新零件,那就不会选择抢修,实验中将单次大抢修成本区间定在10万~15万元之间,小型抢修费用定为2万~4万元,状态抢修和故障检测成本定为8万~150万元。大修变压器役龄回退因子设置为0.4,小修为0.1,状态检修和故障检测为0.3。
3.2 抢修智能决策方法性能分析
根据图像可知,故障抢修点共10个。故障任务、类型以及需要的抢修物资如表4所示。

表4 不同抢修任务的故障类型以及抢修物资
本文方法与改进人工蜂群、考虑负荷时变性的故障抢修决策法进行对比,抢修水平结果如图7所示。

图7 不同小队抢修不同类型故障水平对比
由图7可以知道,相对比其他2种方法,本文方法抢修水平水平综合最高,虽会根据故障类型出现水平波动,但总体水平仍可看出比其他方法好。
一般情况下,电网系统中所用到的抢修是指需要极快的速度,最大程度避免因供电失误而影响正常生活运行,继抢修水平对比后,本文方法将与其他方法进行抢修完成的时间对比,结果如图8所示。

图8 抢修时间对比
从图8中可看出,本文方法所用的抢修时间最短,虽会根据不同故障类型耗时呈逐渐递增状态,但综合来说相比其他方法,本文耗时最少,而其他2种方法的用时接近,均比本文方法耗时多。
4 结束语
为保证变压器出现异常时,工作人员可以在第一时进行抢修,本文提出一种基于物联网的电力机械设备巡检抢修智能决策方法。根据物联网技术构建出线上巡检架构,用故障率表示设备运行状态,利用设备健康指数完成评估,通过评估指标体系,采用层次分析法逐层分析各层面的影响因素根据体系指标权重取值得出三角模糊方程,结合模糊判断矩阵获取出单一因素的决策排序向量,从而完成智能决策。本文方法能够降低设备潜在故障威胁等级,最大程度减少电力企业损失,避免出现区域大规模停电故障。但是该方法没有考虑到路径对抢修的影响,在接下来的研究中,将尝试将最短路径选择融合进抢修决策中。
猜你喜欢
党的生活(黑龙江)(2022年4期)2022-04-25
现代电子技术(2022年8期)2022-04-13
现代电子技术(2022年4期)2022-02-21
商品与质量(2021年43期)2022-01-18
建材发展导向(2021年7期)2021-07-16
科技创新导报(2021年31期)2021-05-10
汽车维修与保养(2021年12期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2019年13期)2020-01-14
汽车维修与保养(2019年4期)2019-09-11
