
血管介入操作力觉标定模块设计
2022-06-25 01:29龚泽宁付泽宇谢荣理
机械与电子 2022年6期
龚泽宁,付 庄,付泽宇,谢荣理,张 俊,费 健
(1.上海交通大学机械系统与振动国家重点实验室,上海 200240;2.上海交通大学医学院附属瑞金医院,上海 200025)
0 引言
目前针对心血管疾病主要有血管介入手术和药物治疗等治疗手段[1],其中血管介入手术通过导丝导管直接对病灶处进行诊断和治疗,具有较好的治疗效果,同时产生创口小,患者恢复快[2-3]。通过将机器人技术应用到血管介入手术中,能够使医生在远离手术室的控制台实现对手术器具的远程操作,从而避免医生受到X射线辐射的伤害[4]。同时血管介入机器人也能够采集手术过程中导丝导管等器具的状态信息,并向医生进行反馈,从而提高血管介入手术的成功率和安全性[5]。
近年来,国内外的研究机构与公司已经取得了很多研究成果,也开发了一些商业化产品[6-7]。尽管血管介入机器人技术获得了高速发展,但是现有的机器人在力觉检测功能的实现上仍然存在一些问题。例如:力觉模块尺寸较大,其安装时的电路模块等结构会限制机器人的工作行程[8-9];力觉模块能够检测的力觉信息大多只是导丝导管等所受到的轴向阻力和旋转扭矩中的一种,反馈的信息有一定的局限性[10];力觉模块大多使用了特制的力觉检测单元对导丝导管等的受力情况进行感知,这使得力觉模块的成本高昂且适用性较低[11-12]。
本文根据血管介入手术的操作要求,针对导丝导管等器具的受力特性,设计了一种力觉标定模块,能够同时检测导丝导管等所受到的轴向阻力和周向扭矩,体积较小,成本较低,具有很好的适用性。
1 力觉标定模块结构设计
在介入手术过程中,医生需要操控特制的导丝导管等器具的运动,使之从远离病灶处的穿刺点沿着血管通道移动到患者的病灶处进行相应的治疗。对医生的操控动作进行分析可知,导丝导管等的运动可以分为轴向的平动和周向的转动2个部分。进一步对导丝导管等器具在血管通道内部的受力情况进行分析可知,血管介入手术中的力觉信息主要包括轴向的阻力和周向的扭矩2个部分。因此,力觉标定模块需要具备检测和分析导丝导管等器具所受的轴向和周向2个维度上的力觉信息的功能。
1.1 力觉标定模块结构布置
力觉标定模块的整体结构如图1所示,主要包括轴向运动控制单元、周向运动控制单元以及管线张紧单元3个部分。轴向运动控制单元由蜗轮、蜗杆、摩擦轮、齿轮轴和轴承等部件组成,其工作原理为通过蜗轮和蜗杆传递外部动力,带动齿轮轴1和齿轮轴2进行转动,从而驱动与齿轮轴1同轴的摩擦轮,实现对被摩擦轮所夹紧的导丝导管等器具在轴向上的运动控制。周向运动控制单元由齿轮轴、壳体以及轴承等部件组成,其工作原理为通过齿轮轴3传递外部动力,带动整个壳体进行转动,从而实现对被摩擦轮所夹紧的导丝导管等器具在周向上的运动控制。管线张紧单元由控制手柄、转轴、摩擦轮、支架和轴承等部件组成,其工作原理为通过操作处于壳体外部的控制手柄,实现对导丝导管等器具与摩擦轮之间夹紧程度的控制。

图1 力觉标定模块整体结构
1.2 轴向阻力标定模块结构设计
轴向阻力是血管介入手术中力觉信息的重要组成部分,血流的流动以及导丝导管等器具与血管内壁的接触都会产生一定的轴向阻力。本文中轴向阻力将直接作用于摩擦轮,如图2所示。

图2 轴向阻力示意图
轴向阻力标定模块主要包括压力传感器、弹簧、传感器压板等部件以及轴向运动控制单元,其工作原理为:当导丝导管等器具受到轴向阻力时,摩擦轮会带动齿轮轴1和齿轮轴2进行转动,此时齿轮轴2上的蜗轮也会随之带动蜗杆进行运动,从而改变传感器压板对弹簧的压力,即改变压力传感器所受的压力大小。通过检测压力传感器的电阻变化,就能够间接地计算得到轴向阻力的数值大小,从而实现对轴向阻力的力觉信息标定。
1.3 周向扭矩标定模块结构设计
与轴向阻力相同,周向扭矩也是血管介入手术中力觉信息的重要组成部分,导丝导管等器具与血管内壁的接触会产生一定的周向扭矩。本文中周向扭矩同样将直接作用于摩擦轮,如图3所示。

图3 周向扭矩示意图
周向扭矩标定模块主要包括压力传感器、弹簧等部件以及管线张紧单元,其工作原理为:当导丝导管等器具受到周向扭矩时,摩擦轮会直接对弹簧施加压力,从而改变传感器压片对压力传感器的压力大小。由于导丝导管等器具受到的周向扭矩有2个方向,因此,周向扭矩标定模块中摩擦轮的上下两侧都安装了相应的压力传感器和传感器压片等部件。根据检测到的压力传感器的电阻变化,可以通过计算和分析得到周向扭矩的数值大小和实际方向,从而实现对周向扭矩的力觉信息标定。
2 力觉信息检测电路设计
力觉标定模块的力觉信息检测电路主要可以分为检测模块和信号处理模块2个部分。其中,检测模块包括压力传感器和电滑环等部件,主要功能是将轴向阻力和周向扭矩转化为相应的电路信号。而信号处理模块包括A/D采集电路和信号转换电路等部分,主要功能是处理检测模块获取的电路信号,并与上位机进行串口通信。力觉信息检测电路的整体框图如图4所示。

图4 力觉信息检测电路框图
2.1 检测模块设计
检测模块通过压力传感器实现对导丝导管等器具所受的轴向阻力和周向扭矩的测量。本文中使用的压力传感器为柔性薄膜压力传感器,其特性为传感器的输出电阻会随着传感器敏感区所受压力的增大而减小。因此,通过测量压力传感器输出电阻的变化就能够计算得到相应的压力数据。
当力觉标定模块进行周向运动时,与压力传感器连接的信号线也会随之进行旋转。而在旋转过程中,信号线可能会出现缠绕和损伤等问题,从而影响整个检测电路的稳定性。由于上述问题是周向运动所导致的,因此,可以通过电滑环解决。本文所采用的电滑环中定子和转子分别引出信号线与周向运动时的固定结构和旋转结构所引出的信号线连接,从而使周向运动时信号线不会发生缠绕和损伤等情况。
2.2 信号处理模块设计
从检测模块获取的电路信号需要经过信号处理模块的采集和处理才能被上位机识别。信号处理模块中的A/D采集电路采用数字转换模块实现。该数字转换模块是专用于上述压力传感器的一种多通道压力转换模块,能够采集薄膜压力传感器产生的模拟信号,并将其转换为数字信号。该模块输出的数据是UART类型,需要经过信号转换电路才能够与上位机实现通信。其中,信号转换电路采用CH340G芯片实现,该芯片能够将UART类型的信号转换成USB类型。将检测模块、信号处理模块以及上位机通过相应的信号线进行连接,并在上位机的串口工具软件中进行波特率等相关参数的设置后,就能够读取到压力传感器所产生的相应数据。当有多个压力传感器同时检测力觉信号时,数字转换模块可以使用不同的通道处理不同压力传感器的数据,并在每次发送的1帧数据中相应的字节地址处进行显示。从整体分析可知,力觉信息检测电路具有小尺寸和低功耗等优点。
3 力觉标定模块实验
为了确定检测数据与实际压力的对应关系,需要对力觉标定模块进行实验。由于检测的力觉信息包括轴向阻力和周向扭矩2个部分,因此,需要根据这2种类型的力觉信息的相应特点采用不同的实验方案。
3.1 实验平台设计
在标定实验中,需要模拟真实场景中导丝导管等器具所受到的轴向阻力和周向扭矩。在实际的工作过程中,力觉标定模块将被安装在1个固定外壳中,整体的实物装置如图5所示。为了实现实验平台的功能,还需要设计相应的施加轴向阻力和周向扭矩的装置。
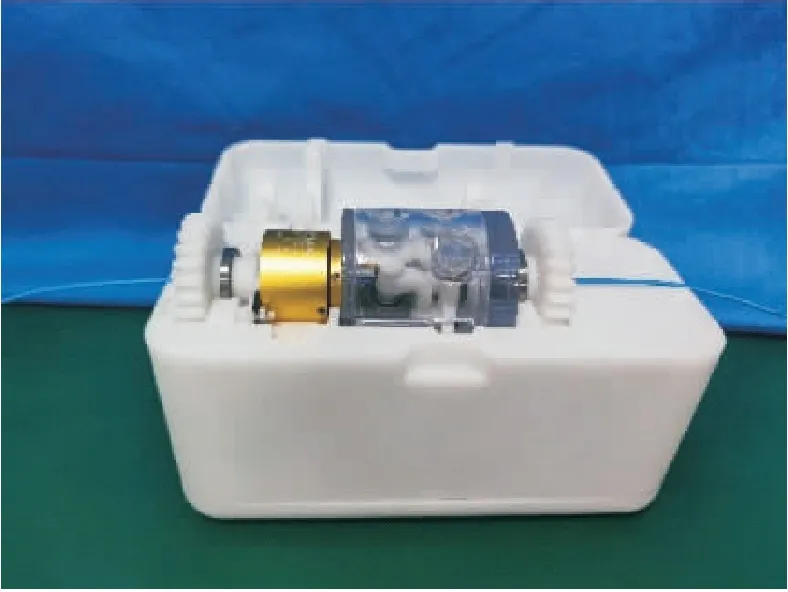
图5 力觉标定模块实物装置
根据轴向阻力的特点,本文设计了轴向阻力标定平台。该实验平台使用砝码施加一定大小的拉力,同时使用定滑轮模块改变拉力的方向以作用于导丝导管,从而模拟轴向阻力F。轴向阻力标定平台的整体结构如图6所示。

图6 轴向阻力标定平台结构
根据周向扭矩的特点,本文也设计了周向扭矩标定平台。该实验平台通过夹紧轴上的螺钉夹紧导丝导管,并使用砝码带动不同尺寸的转盘以产生一定大小的扭矩作用于导丝导管,从而模拟周向扭矩M。周向扭矩标定平台的整体结构如图7所示。

图7 周向扭矩标定平台结构
3.2 实验数据处理与分析
基于设计搭建的实验平台,当力觉标定模块中的导丝导管受到模拟的轴向阻力F或周向扭矩M时,检测电路能够采集到相应的力觉信息,同时上位机能够使用相应的程序对数据进行读取和处理。检测电路通过串口发送给上位机的数据是AD值,其与实际电压值之间的转换公式为
(1)
U为实际电压值;d为实际AD值;dmax为芯片的最大AD值;Us为dmax对应的参考电压值。在实际的实验过程中,由于存在机械摩擦、电路噪声以及外界干扰等因素,上位机读取得到的电路信号会产生不稳定的波动现象,因此,需要进行相应的滤波处理以减弱噪声干扰的影响。本文中选择使用卡尔曼滤波对读取的电路信号进行处理。作为一种线性最优状态估计方法,卡尔曼滤波具有高效、实时以及抗干扰强等优点,也在目标跟踪和图像处理等领域得到了广泛的应用[13-14]。卡尔曼滤波器的状态方程与观测方程为:
xk=Axk-1+Buk-1+wk
(2)
zk=Hxk+vk
(3)
xk为k时刻的状态向量;zk为k时刻的观测向量;A为状态转移矩阵;B为输入控制矩阵;H为观测矩阵;uk为k时刻的系统控制向量;wk为k时刻的系统噪声向量;vk为k时刻的观测噪声向量。假设wk和vk是均值为0的高斯白噪声,且协方差矩阵分别为Q和R。对系统的机械结构和电路系统进行一定的等效和简化后,可以得到相应的状态方程与观测方程。卡尔曼滤波主要分为预测和更新2个步骤。预测步骤是基于上一时刻的状态估计当前时刻的状态,相应的计算公式为:
(4)
(5)

(6)
(7)
(8)

卡尔曼滤波能有效地减弱噪声干扰对电路信号的影响,负载为0时的滤波效果如图8所示。
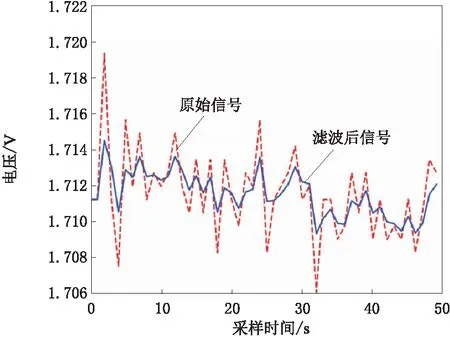
图8 卡尔曼滤波效果
根据图8分析可知,卡尔曼滤波很好地抑制了原始信号中的噪声信息,使滤波后的信号变得相对平稳,这有效地提高了标定数据的准确性。在标定实验中,本文使用逐级加载和逐级卸载的方式控制负载,同时对轴向阻力和周向扭矩各进行3次实验标定,利用获取的负载和电压数据可以拟合出相应的标定曲线,分别如图9和图10所示。

图9 轴向阻力标定曲线
根据图9和图10分析可知,力觉标定模块能够很好地根据读取得到的电压信号获取轴向阻力和周向扭矩的力觉信息,但是该模块也存在一定的不足之处。第一,标定曲线是通过有限数量的标定点得到的,当读取到的力觉信息不在标定点上时,需要通过差分方法计算对应的结果,从而影响力觉检测的准确性。这一问题可以通过增加标定点的数量进行改进。第二,读取得到的电压信号在整个标定实验中的变化相对较小,这同样可能会对力觉检测的准确性产生影响。这一问题可以通过在检测电路中增加信号放大模块的方法进行改进。
4 结束语
本文根据血管介入手术的特点,通过分析手术过程中导丝导管等器具的受力情况,设计了一种能够检测轴向阻力和周向扭矩的力觉标定模块。根据实验结果,该力觉标定模块能够很好地检测血管介入手术中的力觉信息,同时该模块具有尺寸小、成本低等优点。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
昆明医科大学学报(2022年2期)2022-03-29
航空发动机(2022年1期)2022-03-11
汽车维修与保养(2020年11期)2020-06-09
中国循证心血管医学杂志(2020年3期)2020-05-11
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
医药前沿(2019年12期)2019-01-05
科技信息·下旬刊(2018年9期)2018-10-21
航空发动机(2018年4期)2018-09-18
