
一种电机驱动机构的控制方法
2022-07-16 08:45马鹏
科学与财富 2022年4期
马鹏
电机驱动的控制方法常规采用霍尔监测到位或者运行固定时间等,这些方法通用性不好,并且每次的驱动控制效果也不一致。
本方案设计一种满足通用性、广泛性使用需求的方法流程,实现多路径、多条件的运行。过程中结合位置状态监测、电流监测、过程计时监测等参数,按照组合判断进行到位判断,并且根据运行位置计算最优路径,减少了总体的驱动电流消耗。同时可根据两个甚至多个驱动机构的组合来实现各种规则和不规则运动的判断和检测。
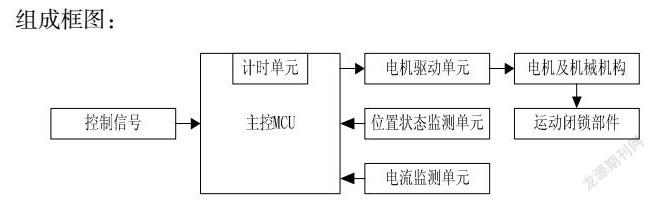
组成框图:
其中主控MCU为核心控制单元,进行算法分析及处理;计时单元是进行运行计时;控制信号是为外部输入的控制电机运动的信号;电机驱动单元实现控制电机,实现电机正转、反转及刹车功能;位置状态监测单元实现对运动闭锁部件的实时位置检测,并返回检测状态结果;电流监测单元实现运动闭锁部件在运动过程中消耗的电流实时值;电机及机械机构为产品中的运动部件;运动闭锁部件为最终的实现闭锁功能部件。
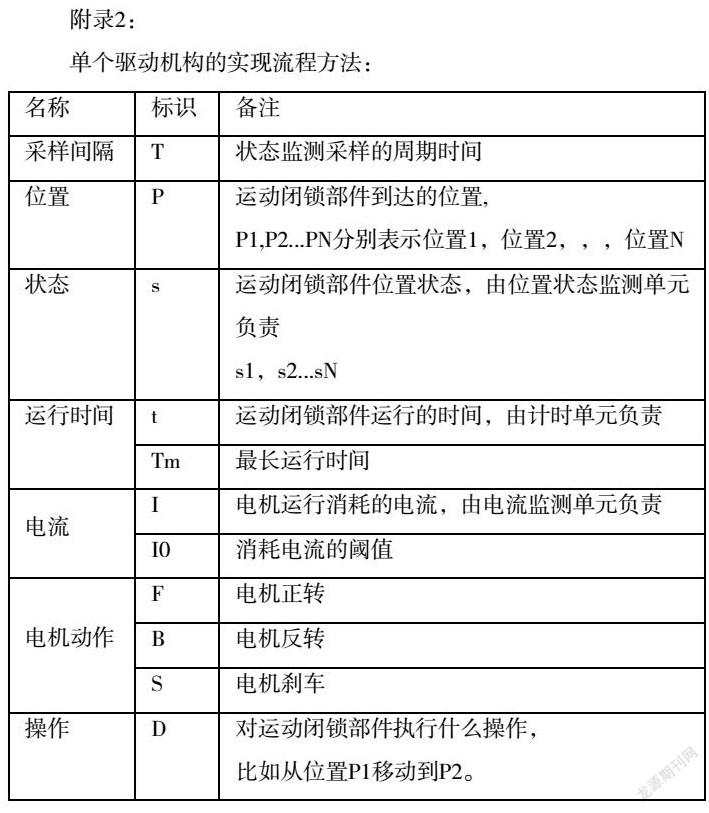
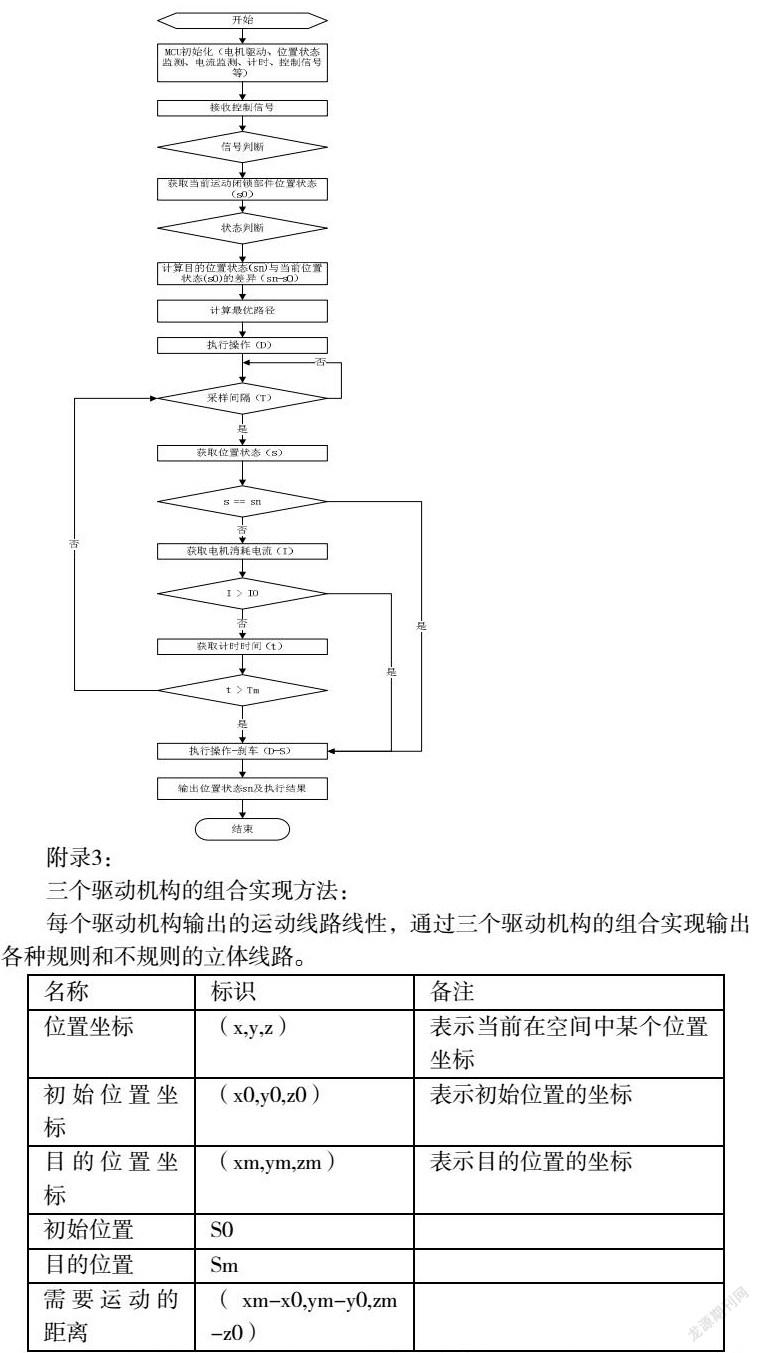
附录2:
附录3:
三个驱动机构的组合实现方法:
每个驱动机构输出的运动线路线性,通过三个驱动机构的组合实现输出各种规则和不规则的立体线路。
三個驱动机构组合叠加时,遍历计算出每条轨迹的长度,并得出最佳轨迹路径,并根据路径确定每个驱动机构各自的到位判断条件。当三个条件同时满足时则说明运动到指定位置。这样取消了对每个目的位置的位置检测判断,增加了机构的灵活度和运行空间。
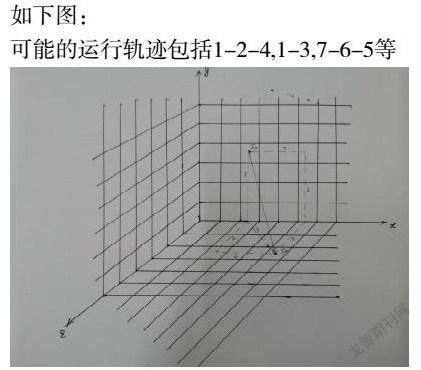
如下图:
可能的运行轨迹包括1-2-4,1-3,7-6-5等
猜你喜欢
车迷(2022年1期)2022-03-29
中国化妆品(2020年9期)2020-10-09
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
小学生学习指导(低年级)(2019年10期)2019-11-26
制造技术与机床(2018年9期)2018-09-19
现代装饰(2018年5期)2018-05-26
小学生学习指导(低年级)(2017年12期)2017-11-22
海外华文教育(2017年6期)2017-08-07
中国三峡(2017年2期)2017-06-09
