
桥梁外观病害无人机探测方法
2022-08-16 09:06韦耀淋蒋立军邹易清
天津建设科技 2022年4期
苏 琦, 韦耀淋, 蒋立军, 邹易清
(柳州欧维姆机械股份有限公司,广西 柳州 545000)
我国桥梁总体健康状况越来越受到各方关注。总体健康评估分别由桥梁上下部结构、桥面系技术状况评定构成,这些复杂部件的外观病害探测分析是其技术评定的关键组成部分[1]。一直以来,桥检车、高倍望远镜、搭载摄像设备的机器人是获取桥梁外观数据的常用方法[2]。桥检车不仅检测成本较高,还需要限制交通,造成人力、物力的消耗且检测部位受限。高倍望远镜由于效率低且检测不全面,一般仅能作为辅助手段。近年来,机器人结合相关传感设备的检测方式逐渐受到桥梁检测行业的青睐;但目前还存在一些不足,如爬壁机器人行走速度慢,只能在单一平面内进行检测,不能获取全部外观,还需借助其他辅助手段[3]。还有一种旋翼无人机的检测设备[4],其上搭载超声探伤仪、前置摄像头、上置摄像头,工作过程中,需要手动控制前置和上置两个摄像头,待人工发现病害,再调整无人机姿态接近拍摄,工作人员需要经过大量的训练才能达成,而且一般会产生大量无效照片,为图像处理工作增加难度;搭载探伤仪设备价格高昂,而且其重量与功耗较大,严重影响检测系统的单次运行时间。
本文以一座全桥长约1 000 m 的悬索桥为例,探究和开发了一种自动化程度高、适用于桥梁外观检测的无人机检测技术,探测锚定室外表面、梁底、桥塔的混凝土裂缝、剥落掉块、蜂窝麻面以及拉索外护套是否开裂等情况并给出精确病害位置,为精确检测和管养提供科学建议。
1 无人机探测方法
1.1 探测设备
外观病害探测需要确定有无病害并确定病害位置,以便后期精确的管养维护。由于本次桥梁较长,检测部位复杂,快速准确实现全桥检测是关键;因此选择续航能力强的无人机,搭载图像提取系统和图像快速分析系统,完成外观图像的获取和分析工作。图像提取系统包括可自由旋转的云台及其上的摄像头,见表1。

表1 摄像头主要参数
由于桥梁存在拉索等高空交错结构,需特别注意避免飞行过程中的机身触碰,飞行设备应该具备合理有效的位置控制和避障功能;同时,桥梁底部一般信号较弱,飞行设备需要在无信号下可以自主悬停或返航。本次探测设备中的位置控制与避障功能设备选择了成熟的产品Guidance[5],其功能强、效率高、配有完整的SDK 文档,可供使用者灵活使用并开发相关的项目。采用五组视觉超声波组合传感器,可实时探测多个方向的环境信息,感知障碍物并显示与障碍物之间的距离;根据检测环境,设置障碍物最小允许距离s0,当飞行过程中与障碍物距离<s0时,无人机被动悬停并发出警报声,使得飞行器即使在高速飞行中也可大概率避免碰撞发生。见表2。

表2 视觉传感平台主要功能
购买满足需求的无人机平台,仅搭载图像提取设备和Guidance 在空中飞行,整体体积小,重量轻,保证了探测所需的续航能力,整套设备不超过6 万元。无人机与图像拍摄的实时信息以及Guidance 前后左右下5 个视角图像通过无线网络模块显示于地面站中,地面站内置图像分析系统,可同时分析图像。无人机自带的控制端地面站可辅助设计飞行参数,检测人员也可通过控制遥控器执行特殊的飞行指令。见图1。

图1 探测设备组成
1.2 探测工作流程
整个病害探测包括探测前调研、作业流程制定、图像获取机制制定、探测报告出具。探测前需要调研飞行当天光照、气象等,应选择风速3 级及以下、光照强度较弱的时段飞行,利于获取亮度均匀的图像,便于后期分析。见图2。

图2 探测工作流程
根据探测目标的类型,选择云台的安装方式:当探测对象位于无人机上方,采用云台上置的模式;当探测对象位于无人机下方或拍摄面与无人机处于水平位置时,采用云台下置的模式。一般梁底飞行时,视觉传感平台安装在无人机上方。
1.3 图像获取机制制定
为了获取有效图像,实现病害定位与图片拼接,需要在图像获取阶段进行图像预处理。预先计算出满足条件下的拍摄距离WD,通过视觉传感平台设定WD 满足要求时即主动拍摄,这样可以获取满足精度要求的、大小统一的图片,以便后期图像拼接出被测对象的全局图。根据成像系统的简化模型[5]可以计算满足要求的拍摄距离,见图3。
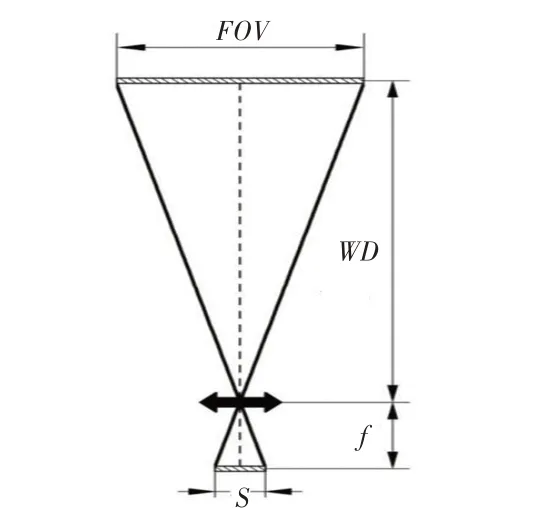
图3 成像系统的简化模型
图3 中:S 为图像传感器尺寸(传感器平面某个方向上的长度)。视场FOV、图像工作距离WD 及镜头焦距f之间的约束关系

视场FOV 由传感器分辨率Rmin、拍摄对象最小特征尺寸lmin、代表最小特征的像素数Pmin决定,所以,图像工作距离可有下述约束

根据选用的图像设备,Rmin=3 456,焦距f为60 mm,图像传感器尺寸S为4.51。拍摄对象最小特征尺寸按照能够发现探测对象宽度>0.2 mm的裂缝设置,取lmin=0.2并给出裂缝的位置,方便维修补救。同时探测精度P要优于0.2 mm,按Pmin=0.15 mm/pix,带入式(2)得WD≈6.13 m。基于图像拼接原理,去重叠率设置为50%,则基于拍摄对象的飞行间隔SD=2.304 m,根据飞行速度0.3 m/s 计算,需要设置间隔拍摄时间为7.68 s。
2 无人机探测分析
桥梁结构复杂,需要进行摸底起飞,最终按照摸底起飞情况设定飞行路线。见表3。

表3 摸底起飞测试

续表3
表3 的测试结果是适合飞行的。测试过程中发现,4轴的无人机在风速>3级后,即使有GPS信号,机身依然有较大飘动;当飞机位于桥梁正底下飞行时,卫星数少,只能进行Atti模式(为半手动模式)飞行,但由于增加了Guidance 平台,还可以实现无GPS 信号下实现飞行器的定位,因此可在小于桥沿往内5 m 的距离操作无人机获取梁底图片。起飞地点应该选择指南针正常的位置,起飞前进行指南针校准。
以桥塔为例,实际探测作业具体步骤如下:
1)桥塔与无人机为水平相对位置,采用云台下置的模式,安装视觉平台Guidance于无人机上方;
2)根据探测要求和现场情况,制定图像获取机制,设置与障碍物最小距离为5 m,当飞行器四周接近障碍物≤5 m时,地面站界面出现扇形警告图示并发出警报声;
3)根据现场环境,在地面站上规划路线,启动无人机抵达巡检起点,开启视觉传感器,将其投射在待检目标上;
4)通过地面站查看飞行周边环境,显示无人机的前后左右下5个视角;飞手控制飞行器进入环境时,除了可以观察主摄像头的视角,也可以随时观察Guidance 传输回的任一路图像,读取该图像对应的障碍物距离信息;此次飞行路径关闭后传感器模块,可以节省功耗;设置前边视角为拍摄对象,当前障碍物满足设定参数时,无人机自动悬停,摄像设备自动拍摄下照片,然后无人机按照既定方向飞行到满足下一次拍摄的时间间隔时,自动拍下下一组照片,以此进行,直至完成拍摄;内置图像分析系统的地面站可快速初步筛选出可疑病害图片;
5)巡检到达终点时,飞机自主返回起飞点;
6)下载SD 卡中的数据,导入构件裂缝图像检测软件进行裂缝检测并输出检测结果;为了避免由于无线传输占用飞行信号和电量,建议待结束探测任务后再下载SD卡内图像数据进行进一步分析。
根据此方法完成最终拍摄目标任务,共获取有效图片537张,总共耗时13 h。在图像处理后,将拍摄图像附贴于全景照片上并标志病害具体位置。采用其他方法实行人工观察并完成拍摄任务的,共拍摄图片3 246 张,总共耗时24 h 且后期需要耗费更多的时间与精力做图像筛选工作。
3 结论
相比传统无人机盲拍探测法,无人机外观探测方法能够有效避免无效图片的产生,大大提高病害的检测精度与图像的处理效率,特别适用于大型复杂结构的外观探测工作。该方法结合测距传感,预先设置自动拍摄距离与频率,可以精确定位病害位置,有效拼接图像,整套设备不再依赖昂贵的飞行平台,灵活简单、成本更低。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
北京航空航天大学学报(2022年8期)2022-08-31
学苑创造·A版(2022年4期)2022-06-18
阅读(快乐英语高年级)(2022年6期)2022-06-17
汽车工程师(2021年12期)2022-01-18
家庭影院技术(2021年10期)2021-11-20
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
汽车维修与保养(2015年8期)2015-04-17
