基于舒适性考虑的AEB仿真测试
2022-09-16 03:24刘国庆赵振东吴金国
汽车实用技术 2022年17期
刘国庆,赵振东,吴金国
(南京工程学院 汽车轨道交通学院,江苏 南京 211167)
随着汽车保有量的不断增加,由汽车碰撞导致的交通事故也越来越多,道路交通安全性显得愈发重要。因此,自动紧急制动 (Autonomous Emergency Braking, AEB)系统 也成为汽车主动安全技术领域的研究热点。AEB系统通过安装在车辆前方的雷达等传感器对前方道路状况进行探测,当系统判断车辆与前方目标物存在碰撞危险时,首先通过声光预警等方式提醒驾驶者,如果驾驶者在一定时间内仍未做出任何有效措施来避免碰撞,系统将自动采取制动措施来尽可能地规避碰撞或减轻事故的严重性。
同时,自动紧急制动过程中的驾乘者舒适性问题也逐渐成为重点研究方向之一。为了解决AEB系统工作时驾乘者的舒适性问题,本文基于优化后的Honda算法,在典型工况下通过CarSim与Simulink进行联合仿真,验证系统的可靠性。
1 安全距离模型
当车辆以一定的初速度开始制动,直到车辆完全停止时所行驶的距离为制动距离。为了避免与障碍物发生碰撞,车辆在刹停时应与前车保持一定距离。经典的纵向安全距离模型有Mazda模型、Honda模型、Berkeley模型以及Time To Collision模型,其他一些模型均是在其基础上改良出来的。本文选择Honda模型作为安全距离模型,并对其进行优化。
1.1 Honda模型
Honda模型分为预警距离与制动距离两部分,其算法如下:

式中,为Honda模型的预警距离,为Honda模型的时间参数,为相对车速,为Honda模型距离参数。

1.2 模型优化
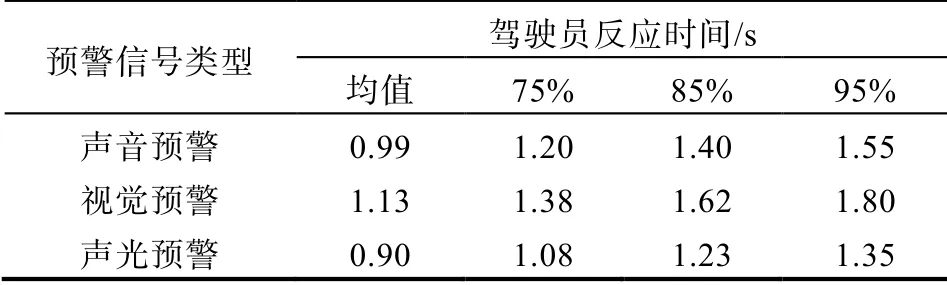
根据Honda模型的实际测试表现来看,其制动过程较为激进,并且没有将驾驶员的反应时间考虑在内。文献[6]统计了驾驶员在不同类型预警下的反应时间,结果如表1所示。
由表1可知,采用声光预警方式的驾驶员反应所需时间最短,为0.9 s,因此,本文选择声光预警的方式,并取驾驶员反应时间=0.9 s。
文献[7]提出,在满足驾乘者舒适性条件下的减速度最小值为=-0.6。因此,考虑到驾乘者的舒适性问题,取公式中主车最大减速度为6 m/s。同时,为了适应车辆与前车的相对速度在不同范围情况下进行制动时不同的安全距离,现将Honda模型修改如下:

2 系统仿真方案
2.1 系统仿真流程
当车辆探测到前方有障碍物时,AEB系统处于待激活状态。一旦车辆与前方障碍物的距离小于预警距离时,系统给予驾驶员相应的声光信号进行提醒;倘若车辆与前方障碍物的距离小于安全距离,且驾驶员尚未采取任何行动来避免碰撞发生时,AEB系统开始介入工作。系统首先给予一个较小的制动主缸压力进行制动,然后对当前减速度是否能够顺利实现车辆碰撞避免进行判断,判断公式为

式中,为位移;为车辆的初始速度;为时间,为加速度。
根据式(4)所计算出的位移,与车辆传感器测得的与前方障碍物的距离进行对比。如果式(4)计算出的位移小于车辆与前方障碍物距离,则证明以当前的制动主缸压力进行制动能够顺利实现刹停并保持一定的安全距离;如果式(4)的结果大于车辆与前方障碍物的距离,则加大制动主缸压力以避免碰撞。系统具体的工作流程如图1所示。

2.2 仿真参数设置
在CarSim软件中,分别搭建主车以不同车速驶向前车静止、前车匀速以及前车突然制动的驾驶工况,然后利用Simulink软件搭建AEB系统安全距离模型以及控制模型,通过两款软件进行联合仿真对AEB系统进行分析和改进。
本文采用CarSim软件自带的E-Class车辆模型。道路设置中选择长为1 200 m,路面附着系数为0.85的路面;雷达选择FCW&AEB,探测范围设置为60 m。
3 仿真结果
系统的测试工况选择欧洲新车评价规程的前车静止、前车匀速以及前车突然制动三种典型工况。仿真中,Honda模型与本文模型均采用相同的方案进行制动。
3)铁链等金属材料质量较重,抱杆安装过程繁琐,导致劳动强度大,安装抱杆的时间普遍就占用整个作业一般以上的时间,作业效率低下。
3.1 前车静止工况
设置前车为静止状态,主车与前车的初始距离为60 m,选择主车分别以20 km/h、60 km/h和80 km/h来对低速、中速、高速三种情况进行模拟,结果如表2所示。

由上表可知,虽然Honda模型的初始制动时刻较晚,但仅能在以20 km/h的速度行驶下避免碰撞,在60 km/h以及80 km/h工况下无法有效避免避撞,且最小减速度均大于−0.6;本文模型初始制动时刻较Honda模型来说较早,但是能够在规避碰撞的基础上,最小减速度均小于等于−0.6,满足驾乘者舒适性指标。
以前车静止,主车以60 km/h驶向前车为例。由图2可知,仿真开始后,本文模型的主车在保持较短时间的匀速行驶后,AEB系统开始工作。与Honda模型相比,本文模型的速度变化曲线和加速度曲线更为平缓,同时在制动过程中,本文模型出现的最大减速度约为−0.6g左右,满足驾乘者的舒适性条件,并实现最终刹停距离与前车保持在1.1 m。而Honda模型未能成功刹停,与前车发生碰撞。并且由于Honda模型没有刹停成功,因此,在仿真中车速又快速恢复至60 km/h。


3.2 前车匀速工况
设置前车以20 km/h的速度匀速行驶,主车与前车的初始距离为60 m,选择主车分别以40 km/h、60 km/h和80 km/h驶向前车,结果如表3所示。

由表3可知,Honda模型和本文模型均能实现主车以40 km/h、60 km/h、80 km/h速度行驶时的碰撞避免,且最小减速度均一致,在40 km/h和60 km/h的测试工况下,能够满足驾乘者舒适性条件。并且在40 km/h与80 km/h速度行驶的情况下相对速度为0时距离更小,更加贴近驾驶者习惯。
以前车匀速,主车以40 km/h速度驶向前车工况为例,仿真结果如图3所示。本文模型的初始制动时刻较Honda模型更晚,且相对速度为0时距离更近,更加贴近驾驶人员的驾驶习惯,同时满足驾乘者舒适性条件。

3.3 前车突然减速工况
设置主车与前车车速均为50 km/h,在两车初始距离为12 m和40 m时,前车在行驶4 s后,分别以2 m/s和6 m/s的减速度进行制动,测试结果如表4所示。

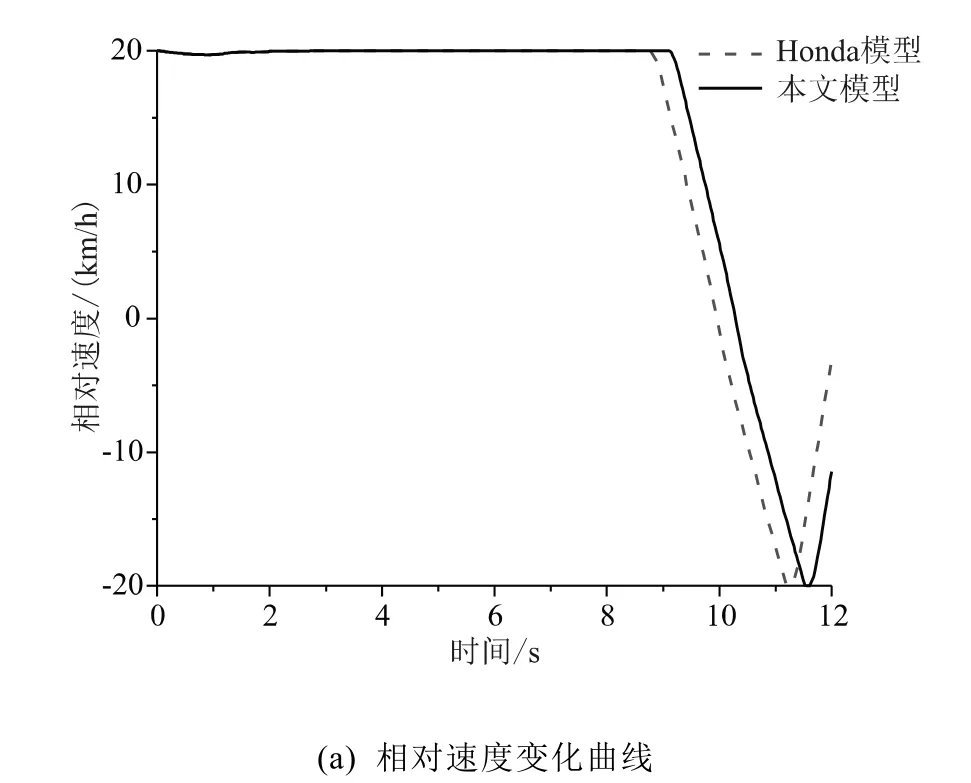
以初始距离为40 m,前车行驶4 s后突然以2 m/s的减速度进行制动为例。由图4可以看出,本文模型的初始制动时刻较Honda模型更晚,且刹停时的相对距离为4 m,优于Honda模型的9.2 m。

4 结论
仿真测试结果表明,优化后的Honda模型能够在有效实现规避碰撞的基础上,满足在大部分的典型测试工况下的驾乘者舒适性条件,并且在部分工况下的初始制动时刻更晚,对驾驶员的影响更小,且相较于Honda模型而言,能够在刹停时保持更加合适的距离。
猜你喜欢
中国典型病例大全(2022年9期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
汽车观察(2021年11期)2021-04-24
汽车观察(2020年11期)2020-12-10
汽车观察(2020年9期)2020-10-27
内燃机与配件(2020年3期)2020-09-10
科技视界(2016年15期)2016-06-30
科技视界(2016年8期)2016-04-05
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14