智能网联汽车底盘线控系统与控制技术
2022-09-16 03:24段红艳王建锋
汽车实用技术 2022年17期
段红艳,王建锋
(郑州职业技术学院 新能源汽车学院,河南 郑州 450100)
智能网联汽车作为新一轮科技革命背景下的新兴产业,为人们的出行带来便利,同时可显著改善交通安全,实现节能减排,减缓交通拥堵,提高交通效率,推动汽车、电子、通信、服务、社会管理等行业的协同发展,对促进汽车产业转型升级具有重大战略意义。
在汽车电动化、网联化、智能化、共享化的变革时代,底盘集成化程度越来越高。线控底盘技术作为汽车发展“四化”的关键技术,可以为未来智能汽车自动驾驶优化、智能座舱研发做好技术积累。底盘线控技术是在传统汽车的基础上,将机械操作机构或液压操纵部件替换为高速容错通信总线连接,与高性能中央处理器进行信息交换与互通,达到高效率通信的电气系统。2020年国务院办公厅关于印发《新能源汽车产业发展规划(2021—2035年)》的通知,明确指出要实施智能网联技术创新工程,其中,底盘线控技术被列入智能电动汽车核心技术攻关工程,这也说明智能网联汽车底盘线控技术在汽车发展中的核心地位。
1 底盘线控技术
智能网联汽车的最终目的是实现替代驾驶者的操作,具备复杂环境感知、智能决策、协同控制等功能,实现车辆安全、高效、舒适、节能的自动驾驶。智能网联汽车装配传感器、控制器、执行器,通过网络技术与现代通信技术,利用这些技术,使车用无线通信技术(Vehicle to Everything, V2X)进行智能信息交换、共享,X包含车、路、行人、云端等。
智能网联汽车主要包括智能化与网联化两个技术层面,要实现车辆的智能化与网联化,需要通过整车控制器(Vehicle Control Unit, VCU)对车辆信息进行整合计算,并传输到底盘系统。底盘系统按照指令进行精确执行,在驾驶过程中,汽车需要大量、精确的底盘系统信号感知车辆状态,保证车辆的安全性、稳定性和操纵性。传统车辆机械结构及液压结构复杂,不易实现精准的控制,而底盘线控系统可根据指令利用电信号实时地控制底盘执行机构做出相应动作,且随时监测车辆的运动状态,即时反馈给汽车,因此,底盘线控技术逐渐成为智能网联汽车的标配。
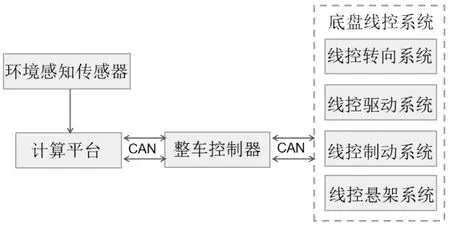
智能网联汽车的底盘线控技术是利用电信号取代机械或液压部件向执行机构传递信息。智能网联汽车一般有人工驾驶和自动驾驶两种模式,在人工驾驶模式下,整车控制器接受驾驶人操作的信号及车辆信息,利用整车控制器将底盘各个部件之间的信息进行整合运算来控制执行机构进行相应的操作。在自动驾驶模式下,计算平台接受环境感知传感器发送的数据,对数据进行计算后,通过控制器局域网络(Controller Area Network,CAN)发送给VCU,VCU对计算平台发送的数据再次进行分析处理,通过CAN线发送给底盘线控系统,最终实现整车控制。底盘线控技术在人工驾驶模式向自动驾驶模式发展的过程中,将人为操作的信号最终由环境感知传感器所代替,VCU通过计算平台分析环境感知传感器的信号来控制底盘线控系统。底盘线控系统控制如图1所示。
2 底盘线控子系统
智能网联汽车底盘线控系统有四个子系统,分别为线控转向系统、线控驱动系统、线控制动系统和线控悬架系统。智能网联汽车通过四个子系统之间的配合来控制车辆前后、左右、上下六个自由度,即纵向、横向和垂向的运动,使车辆能够按照智能决策准确稳定地行驶。横向运动是与车辆行驶方向垂直的运动,主要是线控转向系统。纵向运动是指与汽车行驶方向相同的平动运动,纵向运动控制由线控驱动系统和线控制动系统配合控制。汽车垂向运动是汽车在行驶过程中与车轮平面平行的运动,主要由线控悬架系统实现控制。
2.1 线控转向系统
智能网联汽车的线控转向系统是利用电信号传递信息的一种电气系统。以电动助力转向系统为基础,逐步优化发展。将方向盘和转向执行机构之间的机械连接替换为控制单元控制伺服电机,从而来驱动转向机构。线控转向系统在车辆实现自动避障、自动泊车、车道保持等功能中,智能地控制车辆横向运动。
智能网联汽车处于人工驾驶模式时,当驾驶人转动方向盘,方向盘上的转矩传感器和转角传感器会测量到的转向盘转矩和转向盘转角,转矩和转角信号会转变成电信号输入到电子控制单元(Electronic Control Unit, ECU),ECU通过计算输出正确的指令,控制转向执行电机,使其发生正确的旋转方向、转矩大小和旋转速度的动作,控制机械转向装置,再由机械转向装置控制转向轮,汽车车轮最终达到驾驶人期待的转向轨迹。同时,汽车行驶的转速、转角等信息,通过位移传感器转换成电信号反馈给ECU,进而驱动路感电机,反馈给驾驶人一定的转向盘力矩,来模拟路感。当处于自动驾驶模式时,驾驶人转动转向盘的人工驾驶操作,将变为计算机平台向VCU发送转向意图的自动驾驶操作,计算平台根据接收的环境感知传感器的信号,预置的行驶轨迹等,判断汽车的行驶方向,通过CAN总线发送给VCU,VCU经计算再通过CAN总线发送给线控转向系统ECU,进而控制汽车进行转向。
线控转向系统的控制系统要解决车辆的各种情况,转向电机需要的力计算复杂,这就对转向执行电机的算法及整车控制器有更高的要求。因为线控转向系统对车辆的可靠性与安全性至关重要,所以在线控转向系统中多采用容错控制技术,常用的容错控制技术有硬件冗余方法和解析冗余方法。硬件冗余方法通过设置两套独立的机械装置,对重要部件、极易发生故障部件提供备份,从而提高系统的容错性能。类似于在电控助力转向中加装一个离合器,当车辆正常行驶时,离合器为分离状态,车辆依靠电子信号来传输信息。当电子信号出现异常,离合器结合,使车辆的转向信号由机械部件来进行传递。
解析冗余方法也称控制冗余法,通过算法冗余,使车辆在发生故障时,容错情况下能够实现基本转向功能,但该方法需要科学设计控制器的软件来提高整个系统的冗余度,这也是目前智能网联汽车线控转向系统发展中的重要问题。各大公司基于不同的设计需求采取了相应的容错控制方法,例如,基于数学模型、信号处理、环境感知等方面采取控制措施。
2.2 线控驱动系统
智能网联汽车的线控驱动可以调节车辆纵向运动中车辆向前的运动,实现对车辆期望车速的精准控制。线控驱动系统将原来由机械传递,如驾驶人踩加速踏板动作,变成由电信号精确传递驾驶人动作。若是自动驾驶模式,将由计算平台替代踩加速踏板、操纵变速杆等,由电信号来控制驱动电机。线控驱动系统的实现需要线控油门系统和线控换挡系统配合实现。
线控油门系统主要通过传感器采集传送加速踏板深浅与快慢的信号,从而实现踏板功能的电子控制,这个信号会被控制单元接受、解读,再发出控制指令,控制行驶速度。线控油门系统根据动力来源不同分为燃油汽车线控油门系统和纯电动汽车线控油门系统,下面以纯电动汽车线控油门系统为例,分析其工作原理。在智能网联汽车线控油门系统中,驱动系统能量由动力电池提供,“油门”控制的是驱动电机的转矩和转速,它和计算平台、VCU、电机控制器(Micro Controller Unit, MCU)等一同实现车辆的加减速,计算平台通过周围环境信息融合计算出最佳行驶信息并发送给VCU,由VCU向MCU发送踏板踩下度等信息,MCU控制驱动电机的转矩和转速,从而实现车辆加速,相当于油门的控制。
线控换挡系统省去换挡杆到变速器的传统机械式结构,整个系统更轻、更小、更智能,在现代车辆上应用广泛。实现电控换挡后,其智能化的操作能判断驾驶人的换挡错误操作,避免对变速器造成损伤,从而更好地保护变速器。当选用人工驾驶时,驾驶人操作操纵杆,操纵杆上的传感器会根据换挡动作将其转换为电信号,电信号传送给电控单元,电控单元根据预先设定程序,对信号进行计算处理,后将指令发送给换挡电机,换挡电机决定P、R、N、D四个挡位之间的转换。当车辆选用自动驾驶模式时,驾驶人操纵换挡选择模块的人工驾驶操作,将变为汽车自动判断所需挡位,并进行自动换挡的自动驾驶操作,车辆通过环境感知传感器收集到的信号,通过ECU进行计算,最终实现前进挡、倒车挡、空挡、驻车挡的转换。
2.3 线控制动系统
智能网联汽车线控制动系统的功能与传统汽车制动系统一样,是为了保证车辆能够按照路况等条件进行强制减速直至停车,但是其结构有所区别,线控制动系统取代机械或液压部件,通过线控也就是电子信号,将输入接口(制动踏板)和执行机构(制动执行器)相连接。
线控制动系统对信号精准性和通信协议安全性要求很高。目前车辆上常用的底盘线控制动系统有液压式线控制动系统和机械式线控制动(Electro Mechanical Brake, EMB)系统两种形式。
液压式线控制动系统在传统液压制动系统基础上,取消了制动踏板与制动缸之间的机械连杆与液压管路。在制动踏板上安装传感器,传感器信号转换成电子信号传输给制动执行器ECU,制动执行器ECU根据电子信号来判断制动踏板的动作,或由环境感知传感器检测到障碍物(无人驾驶车辆),由车载计算平台发送信号至制动执行器ECU,制动执行器ECU接收到信号后,通过计算向液压执行机构发送执行命令。
机械式线控制动系统是利用电子机械系统代替所有的液压装置,制动器中的液压执行机构被电机驱动装置取代,完全属于线控制动系统。机械式线控制动系统主要由车轮制动模块、中央电子控制单元和电子踏板模块等组成。电子踏板模块将作用在踏板上的力和速度转化为电信号,中央电子控制单元接收电信号,结合接收制动踏板的信号、车轮传感器信号、车速信号等,根据预先设定的控制算法,进行运算,得出控制信息,例如,判断车轮是否打滑或抱死,从而控制制动器制动。
智能网联汽车电控化程度高,线控制动系统可以与智能网联汽车完美融合,并且线控制动系统制动响应时间更快、刹车反应更快,同时能够提升制动能量回收效率,另外,制动时间的缩短相当于提高了安全性,也在一定程度上提高通行效率。但是,制动系统与车辆的安全性能息息相关,取消机械与液压连接部分的线控转向系统,必须有更严密的控制系统来保障车辆的安全。一般控制都采用冗余的方式,在冗余控制的基础上,系统中每一个节点之间的串行通信必须支持容错,以此来增加其安全可靠性。长城汽车旗下的精工菲格就推出了EMB,取消了原有的制动系统,包括车身稳定控制系统(Electronic Stability Program, ESP)、电子驻车系统(Electrical Parking Brake, EPB)、管路,使电控软件和ECU实现集成化。
2.4 线控悬架系统
智能网联汽车线控悬架系统主要调节车辆的垂直方向,其根据车辆的实时运动情况和外界干扰输入,自主调节悬架系统的性能参数,进而调整车身的运动状态,使车辆具有良好的平顺性、操作性与舒适性。
线控悬架系统主要作用在于控制车身高度,汽车行驶过程中,传感器将道路情况和汽车的速度、加速度、转向、制动等工况的电信号传递给ECU,ECU对传感器发送的电信号进行综合处理,输出控制信号到执行器,进而调整减振器阻尼系数、控制弹性元件刚度和车身高度。
根据车辆的运动、装载等不同情况,车辆的控制策略计算不同的数据,例如车辆载荷、车速等,从而控制线控悬架系统。车辆的载荷不同会影响车身高度,线控悬架系统根据车辆载荷情况,来调节车身高度,使车辆的车身行驶姿态更加稳定。停车后,乘员减少,载荷也减少,车身因重力减小车身高度增加。为了减少悬架系统负荷及改善汽车外观形象,控制系统会自动降低车身高度。当车辆高速行驶时,为了提升行车的操作稳定性,悬架主动降低车身高度。车辆在凹凸不平较差的路况行驶时,为避免与地面或悬架磕碰,悬架控制系统会主动升高车身高度。
线控悬架系统能够根据不同的行驶环境对底盘的减振器特性进行调整,极大地改善汽车的平顺性与操作稳定性,并且线控悬架系统相比其他三个线控系统控制部分更简单,发展更成熟,在车辆上有广泛的应用。
3 底盘线控控制技术
因为传统汽车利用发动机作为主要的动力来源,所以传统汽车的底盘线控技术缺少对驱动部分的控制。随着智能网联汽车电气化程度的提高,通过电控单元实现的控制输入量越来越多,车辆的控制方式要求更加精准、速度更快。
3.1 全矢量单独车轮控制
智能网联汽车底盘线控包括四个子系统,它们之间相互协作,控制车辆的纵向、横向及垂直方向的运动,对应车辆前后、左右及上下六个自由度,这六个自由度最终在车轮的运动上体现,因此,一辆汽车若能实现所有车轮的六个自由度作用力独立控制,那么这辆车就属于全矢量单独车轮控制。
全矢量单独车轮控制是个驱动系统,每个单独的车轮都有驱动、制动、转向和悬架四个独立的操控部件,每一个车轮都设立单独的车轮控制单元,各个车轮由对应的车轮控制单元直接控制。再利用域控制器,使各个车轮控制单元之间交互协作,更好地实现功能性、安全性,同时为智能网联汽车的发展给予更多的附加性能和附加值。利用全矢量单独车轮控制形式,可以有效地缩短控制单元从接收信号到发出指令的时间,从而提高车辆的安全性。例如,根据《2021中国汽车智能底盘大会》中博世公司提出的方案试验分析,将牵引力控制软件模块从原来ESP或者智能集成系统(Integrated Power Brake, IPB)放到电机控制器中。一旦探测到车轮发生抱死,其立刻就会将此信号反馈到电机控制系统,使其立即作出反应防止打滑。在此应用方案中,通信的闭环系统大概可以从100 ms降到10 ms~20 ms,使在路面湿滑路段行驶的终端用户有更好的驾乘体验。
3.2 线控底盘集成控制架构
传统汽车中,液压和机械动力其传输速率过慢,并且机械过多是硬链接,而智能网联汽车电气化程度高,两者不能完全融合。底盘线控技术电气化程度高,各个子系统之间的联动性对汽车的整体性能影响很大。因此,为满足车辆的需求,要求智能网联汽车底盘线控实现集成化控制。
智能网联汽车在行驶过程中,底盘的各个电控部件相互影响、相互制约,整车性能的提升需要底盘各个执行部件的协调作业。智能网联汽车线控底盘集成控制架构是利用一个整车控制器来整合线控底盘中转向、驱动、制动、悬架四个子系统的信息,最终实现整车控制。目前智能网联汽车底盘线控系统中各个子系统缺乏与其他系统之间的信息互通,当整车控制器控制多个子系统时,彼此缺乏协调,容易产生冲突和干扰。
智能网联汽车最终要实现车、路、行人和云平台之间的互通,整车控制器整合车辆的所有信息对智能网联汽车的安全性、操纵稳定性等非常重要。
3.3 底盘线控容错控制方法
智能网联汽车底盘线控多采用容错控制的方式。容错控制是智能网联汽车底盘线控必不可少的控制策略,合理准确的容错控制可以保证智能网联汽车底盘线控系统的可靠性,使其满足车辆的应用要求。智能网联汽车底盘线控系统的容错控制以冗余控制为主,一般采用硬件冗余或者软件冗余实现,能够在系统出现故障时及时对故障做出诊断,同时采用合理的控制措施修复或弥补故障是容错控制有效与否的重要依据。
为了解决智能网联汽车中的自动驾驶安全性,有些公司采取多冗余措施。对执行器、控制单元、传感器、电池等都设置冗余系统。例如,博世公司在面对安全要求较高的制动系统时,设立了两套完全独立的制动执行器,各自有单独执行的制动功能,除了执行器之外,对执行命令的电控单元也设置了冗余,一旦某个网络故障,另一个网络立刻接替传递信息。此外,感知系统也设置备份,以避免由于一个传感器失效导致整个系统失效。
智能网联汽车底盘线控系统没有传统车辆底盘中的机械连接部件及液压装置,信息传递完全依靠电信号,没有独立的后备执行系统,这对智能网联汽车底盘系统的容错控制提出了更高的要求。现在车辆一般采用CAN总线作为通信系统,但CAN总线有时不能完全满足容错的要求,为了提高通信速度与安全性,目前有些公司也利用C类时间触发协议、FlexRay、时间触发CAN总线等开发新的更安全的通信协议。
4 结束语
智能网联汽车底盘线控技术是高精度汽车电子控制技术,其对控制策略要求更高,四个底盘线控子系统的高度配合最终可达到全矢量单独车轮控制。智能网联汽车底盘线控使车辆更加安全、可靠、便捷,智能网联汽车底盘线控系统的控制及集成化成为各大汽车公司研究的热点,底盘线控的集成化势必成为发展趋势,但是目前线控底盘的控制策略与通信协议还不能达到智能网联汽车的要求,智能网联汽车底盘线控系统的控制研究仍任重道远。
猜你喜欢
汽车实用技术(2022年15期)2022-10-19
汽车实用技术(2022年14期)2022-07-30
内燃机与配件(2022年2期)2022-01-17
汽车之友(2021年23期)2021-12-24
汽车与运动(2021年11期)2021-03-22
车主之友(2021年1期)2021-03-04
汽车博览(2018年12期)2018-12-08
科学与财富(2018年28期)2018-11-16
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
考试周刊(2016年55期)2016-07-18