基于本体推理和BN的无人驾驶行为决策
2022-09-16 03:24常嘉伟李展峰封功源
汽车实用技术 2022年17期
常嘉伟,施 卫,刘 斌,李展峰,封功源
(江苏理工学院 机械工程学院,江苏 常州 213000)
无人驾驶系统核心技术包括环境感知、行为决策、运动规划与控制等方面,其中行为决策系统作为无人驾驶汽车的“大脑”,决定车辆行驶过程的安全性、有效性和合法性。因此,优化提升无人驾驶行为决策系统,使其尽可能地代替驾驶员,做到决策的“拟人化”,一直是研究者需要努力的方向。虽然在高速路段下的自动辅助驾驶系统已较为成熟,并已大量商业化,但作为上层统筹的无人车行为决策系统仍因实时性、安全性等方面的不足,无法应对现实驾驶场景。尤其在城区路段,无人车辆需要面对更为复杂的导航需求和道路状况,对周围道路、障碍物、交通标识、红绿灯及全局导航信息需要有更为全面有效的评估,同时对周围交通参与者的行为意图也要有更为及时和精确的判断。
面对当前无人驾驶行为决策中的难题,状态机模型是应用最为广泛的决策模型,即通过建立环境输入与驾驶动作之间的状态迁移条件来实现驾驶过程中的决策任务,它运用简单、易于实现,但无法有效应对复杂工况和带有不确定性场景。基于知识推理的决策模型对驾驶场景的描述清晰,控制逻辑合理,但随着场景输入条件的增多,容易出现规则的组合爆炸。基于深度学习和神经网络的决策方法透明性差,同时依赖于大规模的数据训练,训练时间较长。贝叶斯网络是基于统计的决策模型,对于不确定场景下的决策推理,有较高的置信度。但是其网络建模存在维度灾难,条件概率分布表(Conditional Probability Table,CPT)需考虑的数量随着节点数量呈指数级增长。
采用有向无环图可以显著降低贝叶斯网络建模的维度,同时如何设计合理的网络结构也就成了研究的难点。本体作为一种能在知识层次上描述知识模型的建模工具,可以统一、规范地描述场景知识,但其本身并不具备独立的推理能力。通过本体理论对驾驶周边道路场景进行合理的建模,以知识逻辑推理将决策任务合理拆分,选择对应所需的本体信息构建有向无环图。通过先验信息和专家经验生成CPT文件,即可构建完整的贝叶斯网络来实现推理功能。最后通过贝叶斯网络(Bayesian Network, BN)推理得到当前驾驶环境下的最佳行为模式。
1 建立驾驶场景本体知识模型
本体是一种统一的、规范的知识描述方法,通常用来描述领域知识。运用本体知识可以将驾驶场景概念化,分解归纳为合理类集,同时清楚地表达概念类之间的属性关系。
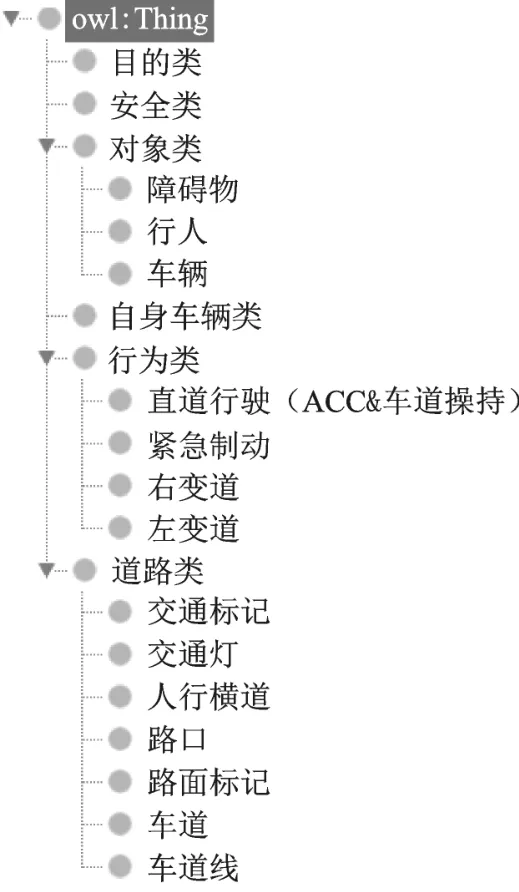
根据无人驾驶场景中需要考虑的环境因素,设定道路类、行为类、对象类、自身车辆类四种基础概念类别,同时引入安全类和目的类两类直接作用于行为决策的上层概念类集。
(1)道路类表示与道路相关的信息要素,包括车道数、车道线、路面标记、路段类型等。
(2)行为类表示无人车辆可以执行的驾驶动作,分为横向行为与纵向行为。为了更为简化,将单独的驾驶动作组合为完整的驾驶模式,包括直道行驶:自适应巡航控制(Adaptive Cruise Control, ACC)&车道保持辅助功能(Lane Keeping Assistance, LKA)、左变道、右变道和紧急制动。
(3)对象类表示当前道路上存在对象,包括车辆、行人、障碍物等。
(4)自身车辆类表示自身车辆状态,主要包括自车与其他车辆或障碍物的相对速度、距离等。
(5)安全类是基于其他基础类别的上层判定类别,判定结果直接决定行为类的输出。
(6)目的类表示服务于当前驾驶行程的有效性,为换道行为提供主要参考依据。
驾驶场景分类如图1所示。
考虑到无人车驾驶行为决策主要服务于最终的输出模式,即本体中的行为类,因此,其父节点应为行为类中各项的直接影响因素,同时每一节点的设计都应考虑到安全性、合法性、有效性三个角度。
导航信息直接决定本次驾驶任务的有效性,若无法到达目的地,整个驾驶过程将无意义。因此,当前路段的导航信息为确定性要求,即到路口时是否需要左转或右转是确定的。但是导航信息无法直接转换为变道条件,变道行为还需考虑到当前道路是否满足变道条件,即左右车道线的虚实以及此时本车道与周边车道的安全性。
安全类作为行为决策的父节点之一,提供当前道路环境的安全性依据。为驾驶过程带来不确定因素的是其他车辆的驾驶动作,它的影响主要体现在本车跟车和变道的过程中,同时直接决定了当前驾驶的安全性。无人车决策前,应知道当前车道以及左右车道安全与否,因此,设定G,G,G作为行为决策的三个父节点,分别代表左车道、本车道以及右车道的安全性。
换道意图的产生不仅仅取决于当前驾驶任务的目的性,在保证驾驶方向正确与行驶安全的基础上,适当的超车行为也是驾驶更顺畅的关键。为避免持续地跟车行驶导致整个驾驶任务的总时长过大,引入限速达成度(SpeedLimitDisparity)作为换道超车行为的参考依据。当车辆在跟车状态下与限速上限差值超过20%的时间到达阈值,则视为超出容忍度,可以进行换道超车,因此,限速达成度也作为最终决策的父节点之一。
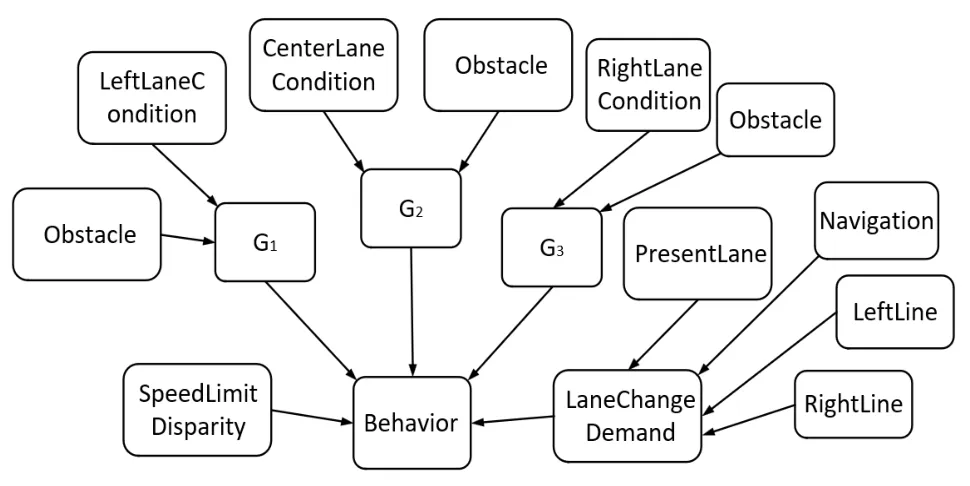
最终无人驾驶行为决策受到三大类别共5个父节点的影响,其本体知识模型如图2所示。

在此基础上,安全类主要与自身车辆类、对象类相关联。目标车道是否安全,主要取决于车道上的交通参与对象,即其他车辆、障碍物(Obstacle)、行人以及他们此时的状态。
基于导航的换道需求(LaneChangeDemand)是由导航信息直接决定的,以车辆为主体,当所在车道与导航(Navigation)信息相匹配,则无换道需求,反之,则需进行换道准备。同时换道行为受到左右车道线的约束,当车道线为实线,则无法进行换道。
因此,可以建立城区交通环境下的无人驾驶行为决策本体模型,如图3所示。
2 建立贝叶斯网络


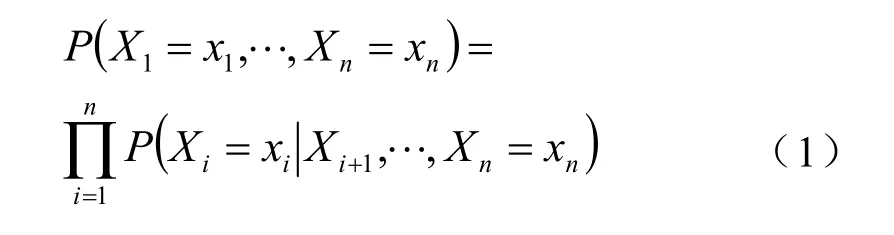
其条件概率公式为

根据贝叶斯定理可得

式中,()为类“先验”概率;(,)为样本相对于类标记的条件概率。
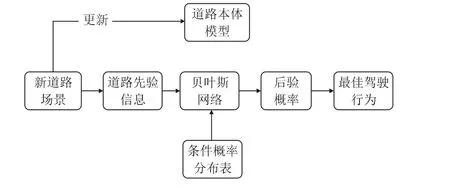
贝叶斯的推理过程是指在网络结构和CPT已知的情况下,计算某个变量取值的最大概率。本文主要基于的后验概率问题来决定无人车辆当下应该采取的驾驶动作。后验概率问题是指在已知一些节点概率的基础上,再根据新的先验概率,通过贝叶斯公式修正,得到后验概率,取对应节点中概率值最大的状态作为无人车辆的动作输出。
利用贝叶斯网络的推理过程如图4所示。
2.1 确立BN拓扑结构
将上文中的无人驾驶行为决策本体模型中的节点及其父子关系映射为贝叶斯网络拓扑结构。本体模型中每一类集中的每一对象即可成为贝叶斯网络中的一个节点,本体理论中的对象属性则可映射为有向无环图中的有向边。相对于本体模型,新构建的贝叶斯网络只需为各个节点添加合理的状态变量及其可能的取值。贝叶斯网络节点变量及其状态取值如表1所示。C表示与后车碰撞可能较高,即1.7 s<≤3.5 s。

Behavior节点包含四种状态,作为无人车行为决策的最终输出,分别对应四种驾驶模式:LKC+ACC的直道驾驶模式、向左换道模式、向右换道模式以及自主刹车模式;G、G、G三个节点分别对应左中右三车道的安全性,有安全和危险两种状态,若无左或右车道,则同样归类为危险;PresentLane节点表示本车当前所处车道(驾驶场景默认为三车道);LaneChangeDemand表示根据导航(Navigation)以及左右车道线约束给出的换道建议;Left(Center/Right)LaneCondition表示本车与对应道路上其他车辆之间的相互行驶状态,引入两车从冲突开始到发生碰撞的时间(Time To Contact, TTC)作为评价车辆状态安全与否的指标,TTC越小表示两车越容易发生碰撞。评估公式为

式中,为跟随车与被跟随车的相对距离;为跟随车的速度;为被跟随车的速度。
节点中状态含义如下:
C表示即将与前车碰撞,即≤1.7 s;
C表示即将与后车碰撞,即≤1.7 s;
C表示与前车碰撞可能较高,即1.7 s<≤3.5 s;
C表示与前后车不会发生碰撞,即>3.5 s&>3.5 s。
2.2 确定BN条件概率表
构建完整的有向无环图后,需要根据历史驾驶案例和专家经验确定每个节点的条件概率表。
没有父节点的变量在决策系统中是作为外部环境感知的输入,只需给节点一个初始概率。G、G、G和LaneChangeDemand节点都有一个以上的父节点,以G和LaneChangeDemand节点为例,G节点的条件概率分布如表2所示。

LaneChangeDemand节点的部分条件概率分布如表3所示。


完整的贝叶斯网络构建完成,即可根据先验信息推理当前最佳驾驶行为。
3 驾驶场景的搭建与实例验证分析
Netica是当下最为流行的可视化贝叶斯推理工具,它的优点是可以图形化,简易快速地建立贝叶斯网络。本文通过Netica作为贝叶斯网络的推理工具,并验证上文构建网络的有效性。
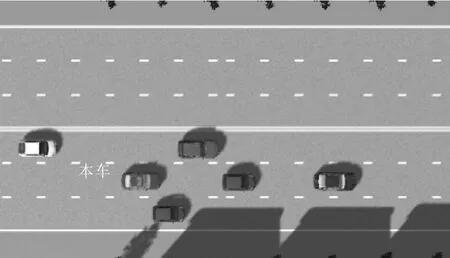
本文采用Prescan仿真软件来预设驾驶场景,预设驾驶场景为城区道路环境下的一个十字路口,如图4所示。

该十字路口为双向六车道,规定限速为60 km/h,场景(1)如图5所示。本车(红色小车)行驶在中间车道,距离路口尚且有一段距离,其左右和前方车道都有车辆在行驶。本车目前行驶速度为50 km/h,中间车道最前方车辆(车辆1)因即将驶入路口,故开始减速,车辆1后方车辆(车辆2)未开始减速,仍保持48 km/h的速度行驶,与本车距离为8 m,左车道两车均以55 km/h的速度行驶,右车道车辆(车辆3)以54 km/h的速度行驶,车身超出本车车头3 m。
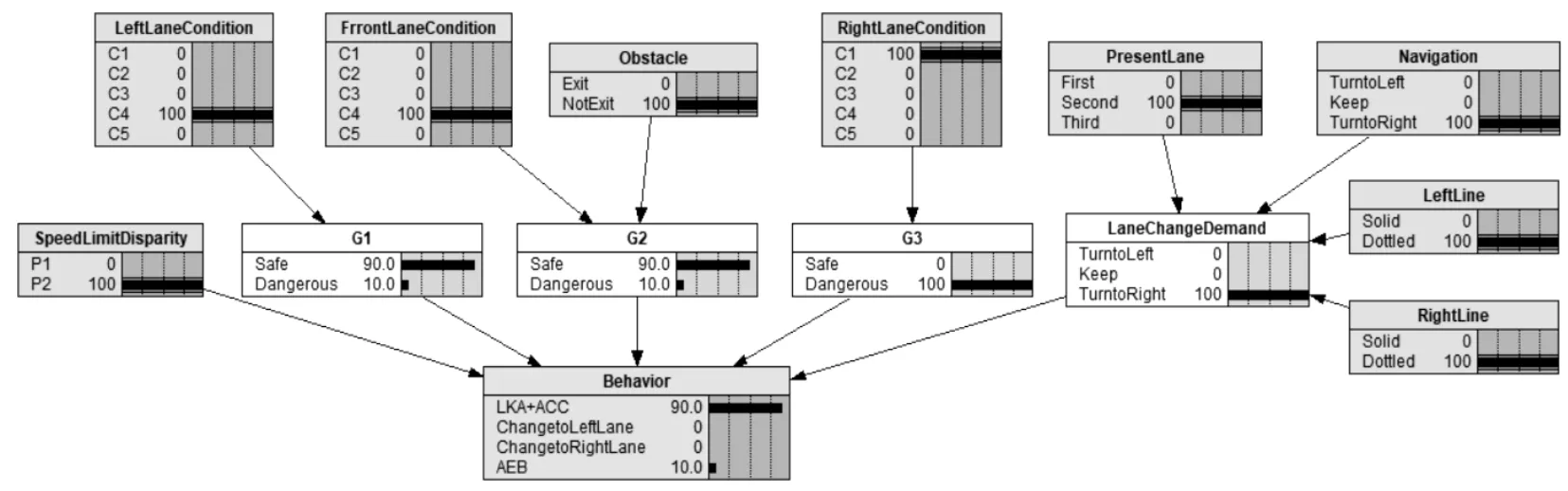
根据导航本车需在该路口右转,传感器获取的当前道路信息作为先验条件,贝叶斯网络给出的判断如图6所示。由图6可以看出,保持当前车道行驶的概率为90%,制动的概率为10%。虽然目前有向右换道的需求,但是右方车道不满足换道条件,因此,车辆仍将保持直道行驶。
驾驶场景(2)如图7所示。
车辆1减速后,车辆2紧跟着减速,本车在看到前车刹车灯亮起后也开始减速,由此,车辆3与本车的速度差变大,两车之间的前后距离也随之增加。贝叶斯网络给出的判断如图7所示。
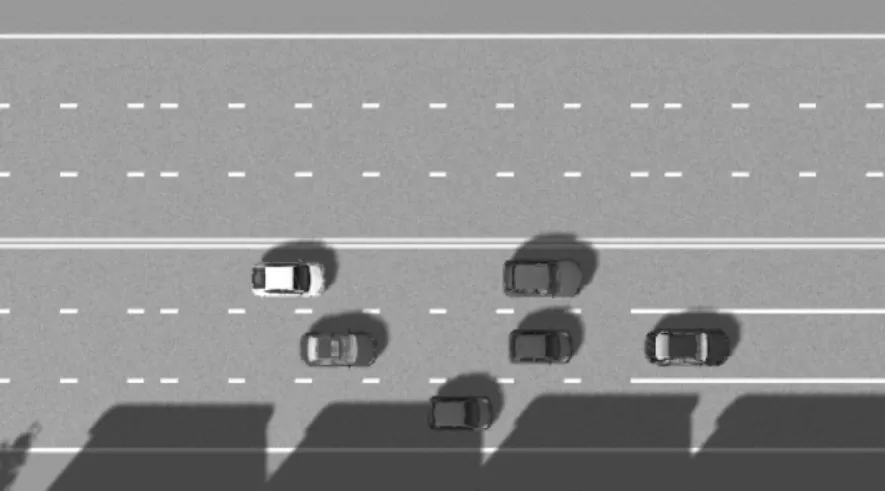
向右换道的概率为90%,直道行驶和制动的概率分别为8%和2%。由于向右换道的需求持续存在,在此时刻,右方车辆与本车已经拉开了距离,右车道具备了换道条件,因此,本车可以顺利地做出向右换道的选择。
驾驶场景(2)的BN如图8所示。

4 结束语
本文通过本体知识推理建立城区驾驶场景本体模型,再映射为贝叶斯网络实现模型的推理功能,通过最大后验概率选择当前最佳无人驾驶行为,最后在Prescan中设置驾驶场景并通过Netica建立贝叶斯网络验证该模型在一般场景中的可行性。该方法能有效地利用当前道路因素,并反应它们之间的相互关系,通过增设安全类与目的类使繁多的类别合并以降低建模的维度,同时使设计能更好地符合安全性、合法性、有效性的初衷。贝叶斯网络面对城区复杂多变的驾驶场景也有较高鲁棒性,通过父节点与子节点的连接可以更直观地反应道路因素与驾驶行为间的因果关系。在面对城区复杂驾驶环境时,本方法能使车辆较好地判断当前最优驾驶行为。
猜你喜欢
齐鲁艺苑(2022年1期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
哈哈画报(2021年10期)2021-02-28
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
数学学习与研究(2017年10期)2017-06-22
科技创新导报(2016年32期)2017-04-22
卷宗(2013年6期)2013-10-21
小天使·四年级语数英综合(2011年4期)2011-06-30