面向高速公路运管的车路协同云控平台架构设计
2022-09-16 03:25唐睢睢
汽车实用技术 2022年17期
李 岩,唐睢睢
(中国交通信息科技集团有限公司,北京 100044)
自动驾驶技术的研发与应用为提高交通运行效率和安全水平、实现高品质服务、提高社会经济效益,促进交通运输服务与制造业、农业、旅游业、商贸业、信息业等关联产业的深度融合起到了催化作用。以美国为代表的发达国家选择以车联网(Vehicle to Everything, V2X)为主、基础设施联网(Infrastructure to Everything, I2X)为辅的单车智能技术路线,而中国基于成本控制、基础支撑、推广应用、技术引领、产业带动5个维度综合考虑,选择了以“I2X为基础、V2X为辅助”的车路协同技术路径。从效率和安全角度出发,中国高速公路具有主体基础设施相对完善,车道线清晰,路况好,人车混行等复杂场景少,且恶性交通事故主要由于车辆行驶行为不当造成,是车路协同优先落地的场景之一。
车路协同系统集成了各类复杂的技术,主要包含车车/车路通信技术、交通安全技术、交通控制技术、环境感知技术等,这些技术均已有成熟的应用和相关产品落地。面向服务于道路运营单位及行业管理单位的云控平台正是车路协同技术的主要承载体,云控平台的建设是车路协同发展普及的必由之路,但目前其云控平台的研究进程发展相对缓慢,缺乏相应的标准规范,应用程度较低。
1 总体思路
本文按照业界普遍认同的“端-边-云”车路协同云控平台逻辑架构,更加全面地分析应用场景,并由此提出面向道路运营单位及行业管理单位的云控平台功能架构及技术架构设计,实现数据及算法模型驱动管控策略生成,实现路侧设备联动控制与管理,提高道路服务水平,降低运维成本,保障道路平稳有序运行。评价分析功能模块中细化了感知数据资源项,给出了不同气象条件下不同道路条件下的建议行驶速度阈值。预测仿真功能模块以匝道汇入场景为例,制定关键控制数据项。协同控制功能模块以匝道汇流场景为实例,明确各类外场设备控制动作及方式。逻辑架构如图1所示。
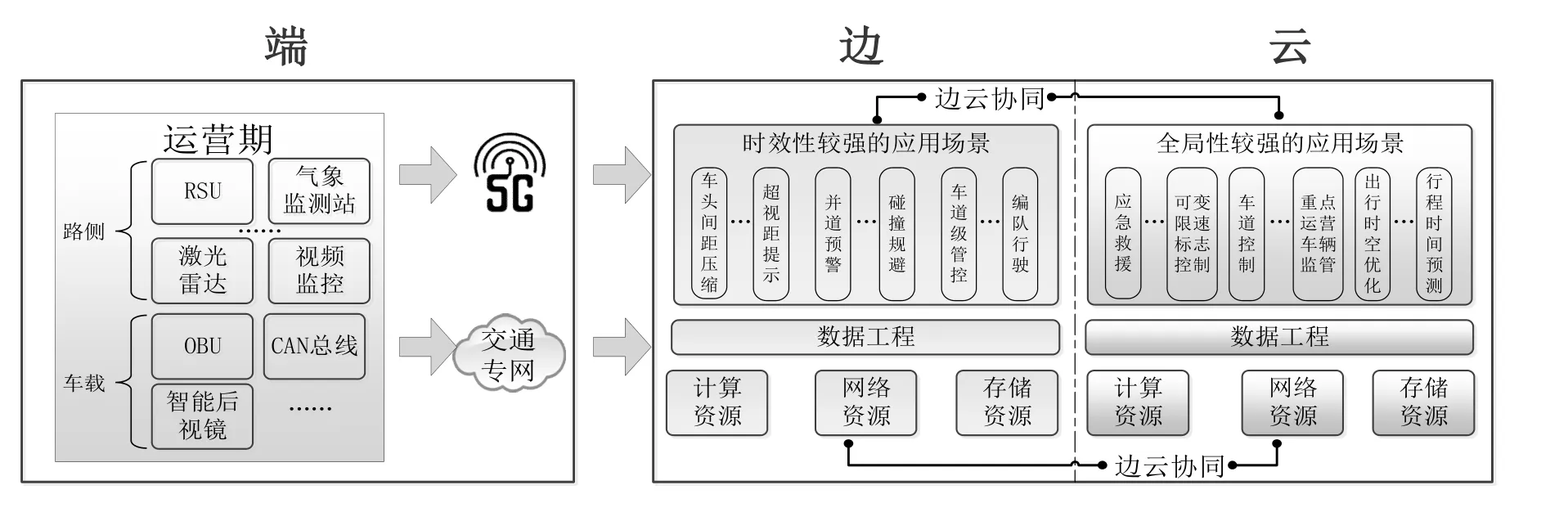
面向高速公路运营管理单位的车路协同云控平台按照全生命周期化、数字孪生化、运维一体化理念构建“端-边-云”三级架构。
“端”:于建设期部署北斗等相关智慧工地设备,运营期部署路侧设备,包括支持专用短程通信技术(Dedicated Short Range Communication,DSRC)、长期演进技术-车辆通信(Long Term Evolution-Vehicle,LTE-V)、蜂窝车联网(C-V2X)等多通信协议的路侧单元(Road Side Unit, RSU)、感知设备、信息提示设备,车端设备包括车载单元(On Board Unit, OBU)、控制器局域网络(Controller Area Network, CAN)。
“边”:边缘计算,由于对时延要求有所限制的紧急制动、并道预警等实时业务均由边缘云完成,所以需要加快网络中各种信息、服务与端设备的交互,但全局性、关联性业务需与“中心云”协同处理。
“云”:云控平台,由基础设施(IaaS)、应用支撑(PaaS)、应用系统(SaaS)三个层次构成,向出行者提供控制及服务两类全局性关联性服务。本文的技术路线图如图2所示。
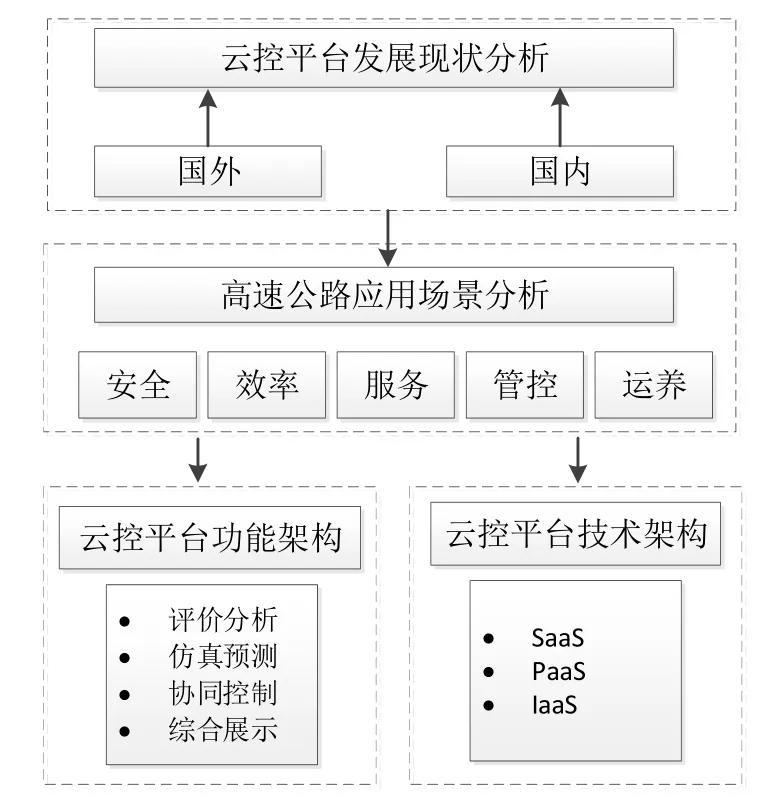
2 云控平台发展现状
云控平台(Cloud Computing Platform, CCP)为智能汽车及相关管理与服务机构等提供车辆运行、基础设施、交通环境、交通管理等动态基础数据,涵盖数据存储、数据运维、大数据分析、云计算、信息安全等基础服务要素。
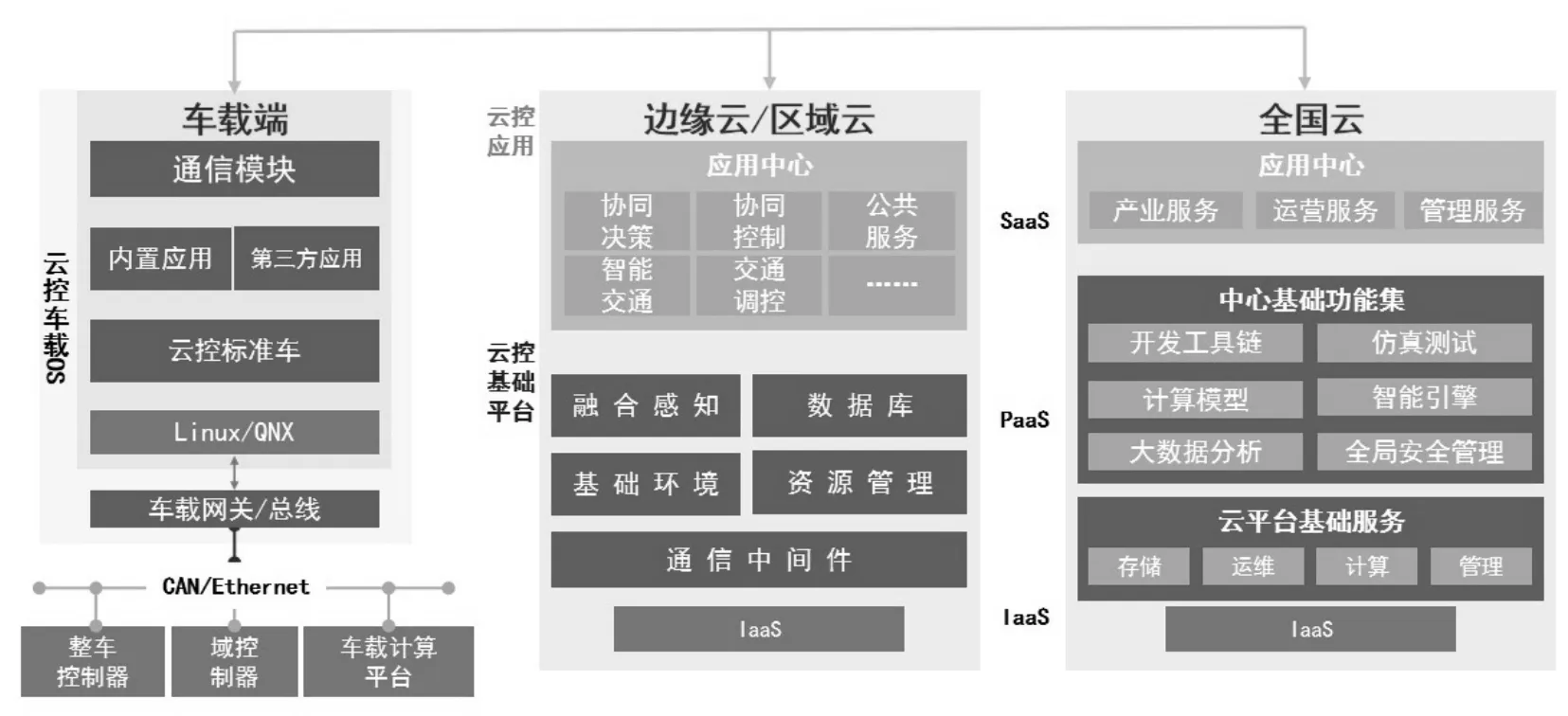
中国智能网联汽车与交通研究中心、汽车安全与节能国家重点实验室、清华大学车辆与运载学院、启迪云控(北京)科技有限公司提出了车路协同云控平台的构建思路,该平台基于赛博-物理-社会系统原理(Cyber Physical Social Systems,CPSS),物理架构分为车端-边缘云/区域云-中心云3级,通过感知、通信、计算、控制等技术,基于标准化通信协议,实现物理空间与信息空间中“车、交通、环境”等要素的相互映射,利用可靠标准化交互与高效协同及云计算大数据能力,解决系统性的资源优化与配置问题,促进人车路运行按需响应、快速迭代、动态优化,最终实现协同式无人驾驶。其云控基础平台的架构方法与功能定位,如图3所示。
3 云控平台架构设计
3.1 应用场景分析
随着各类车路协同工程的开工建设,群智能算法、编队跟驰等理论模型的成熟优化,车路协同的应用场景将不断丰富,迅速扩充,本文在《公路工程适应自动驾驶附属设施总体技术规范(征求意见稿)》提出的应用类别及具体场景基础上,结合以往项目经验对其进行了丰富和补充,并将其作为指导云控平台功能架构设计的基础。
依照高速公路业务需求,应用场景的类别在现有的“安全类”“效率类”“信息服务类”三大类基础上,增加“管控”“运营养护”两类,以满足运营单位的实际业务需要。
具体场景除基本的交叉路口碰撞预警、前方拥堵提醒、智能汽车近场支付等22个外,增加危险/不良驾驶行为预警、夜间行车引导、施工/事故影响管控、服务区信息播报与推荐、远程车辆问诊、绿通申报抽查、两客一危重点车辆管控、主体及附属设施远程巡检、路面异物/破损群智检测等25个应用场景。
安全类增加危险/不良驾驶行为预警、夜间行车引导、突发极端天气行车引导、专用车道路权分配与控制、车路虚拟行驶试验。效率类增加基于车路协同的不停车收费、收费车道引导、最佳车道/车速引导、行车路径规划、施工/事故影响管控、交通流量管控、道路限行管控、道路封闭管理。信息服务类增加服务区信息播报与推荐、远程车辆问诊。管控类增加隧道照明控制、路侧设备联动管控、超限监测、绿通申报抽查、两客一危重点车辆管控。运营养护类增加一路多方联动处置、主体及附属设施远程巡检、路面异物/破损群智检测、巡检任务生成与分派、排障任务生成与分派。
3.2 功能架构
高速公路运营管理单位的业务职责分为交通管理、收费管理、路政管理、养护管理、监控及通信管理、服务区管理和综合开发6方面。根据实际需求,随着车路协同系统的建设,新的应用场景不断涌现,功能需求随之变化,本文将云控平台的功能锚定为评价分析、预测仿真、协同控制、综合展示四方面。
3.2.1 评价分析
通过路侧高清摄像头、激光雷达/毫米波雷达、导航软件、车载OBU、气象监测器等设备全量收集车、路、环境的数据资源。
车辆基础信息含车辆ID、车型、车牌、车身颜色、受控优先级、车辆网联化、车体尺寸;车辆位置信息含时间、车道、位置;车辆实时状态含实时速度、行驶方向、车头间距、纵向加速度、横向加速度、车头方向角、方向盘转角、油门、刹车、灯态、故障码、油量;车辆历史数据分析含平均速度、换道频率、车道偏离、驾驶时间、行驶轨迹、速度方差、违章记录、黑灰名单;道路静态数据含交通安全设施标志/标线、路段起终点、路网转换、车道级信息、限速信息、圆曲线最小半径、行车视距、机电设备、构造物;道路动态数据含道路施工、交通管控、交通事故、交通拥堵、车道密度、断面流量、冲突数、历史事故率、车道平均通过速度、车型、统计、设施健康状况、载荷;行车环境因素含天气种类、道路附着系数、能见度、光照度等。
根据以上数据资源得到建议行驶速度阈值、路侧设备覆盖率、服务车辆类型及数量、设备在线率、管控策略生成下发及执行率等核心指标,构建具有车路协同特色的关键指标体系,用以评价车路协同道路建设及运行服务效果。
评价分析功能以视频分析、知识数据库、深度学习为基础技术支撑,以调度中心、计算引擎为核心对不同层面的海量数据与实际业务需求相结合进行计算分析,挖掘数据价值,打通数据壁垒,打破数据孤岛,形成可量化的指标数据。并以此为基准,与当前云控平台管辖范围内的相关数据做分析对比,对其管控效果进行分析评价。3.2.2 预测仿真
预测仿真将融合路网流量、行程时间、交通饱和度、交通状态、匝道信控方案、交通安全服务水平等级等信息,基于在线仿真技术,通过实时数据接入,依据当前路网交通运行态势,在线生成控制策略与诱导方案,并对方案的效果进行预估评价,为主动交通运行管控提供决策支持。
以匝道汇入场景为例,通过基于蚁群算法优化的Elman神经网络模型进行预测仿真后,生成以下关键控制数据项。
输入:汇入车辆ID、主线车辆ID、车型、时刻、位置(经纬度)、位置(海拔)、车头方向角、车体尺寸(长、宽)、速度、纵向加速度、横摆角速度;
输出:主路可汇入区段下游点、主路可汇入区段上游点、主路可汇入区段下游点移动速度、主路可汇入区段上游点移动速度、匝道建议汇入位置、匝道建议汇入时间起点、匝道建议汇入时间终点、匝道建议汇入车速。
3.2.3 协同控制
基于路网交通状态等级与安全等级评估结果,综合路径行程时间、出行距离、出行费用、拥堵造成的延误及路径事故风险等级等诸多因素,建立兼顾出行效率与安全考量的路网交通流诱导算法,获得不同路网环境下的最优路径诱导方案。
基于评价分析及预测仿真结果,融合路段实时流量数据,可构建入口车流智能控制、多匝道信号配时协同优化控制、车道级流量智能调控、弯道速度实时调控等相关功能模块,集成出入口-匝道-车道三级管控的多目标优化算法,形成匝道信号配时联动方案,车辆汇流/分流控制方案,弯道行车控制方案等。
以匝道汇入场景为例,匝道情报板面向汇入车辆提示主路最右侧车道情况,向其发送加/减速、汇入时机等信息。主线情报板面向主路车辆提示匝道情况,提供转换车道、加/减速、汇入时机等信息。导航软件从云控平台收集数据后,根据算法,得到相应数据,向不同车道车辆提示汇入信息,位置、速度、距离、建议措施。同时,云控平台可控制动态限速标志对主线及匝道汇入车辆进行灵活的限速控制,控制智慧道钉闪烁时机与频率,例如在匝道汇流处前方500 m,主线最右侧车道智慧道钉由黄色常亮变为黄色闪烁,提示车辆调节速度。
3.2.4 综合展示
为了使车路协同云控平台的工作效果能直观和动态地呈现,综合展示囊括宏观、中观、微观三个层面逐层下钻展开。宏观对象主要包括路网路线,中观层面对象主要包括路段、关键构造物、关键场所,微观层面对象主要包括车辆、路侧设备。
以地理信息系统(Geographic Information System, GIS)为底图,结合各类数据,通过视频、列表、热力图、数据迁徙等多种形式,实时展示路网运行,车辆行驶状态、预测仿真结果、潜在风险因素、管控策略执行效果等信息,形成具有直观性高、形式丰富且交互性强的跨业务、跨地域的综合展示,进而增强云控平台人机交互的可靠性,保证平台的服务质量。
3.3 技术架构
云控平台技术架构由基础设施层、支撑层、服务层三部分构成,如图4所示。
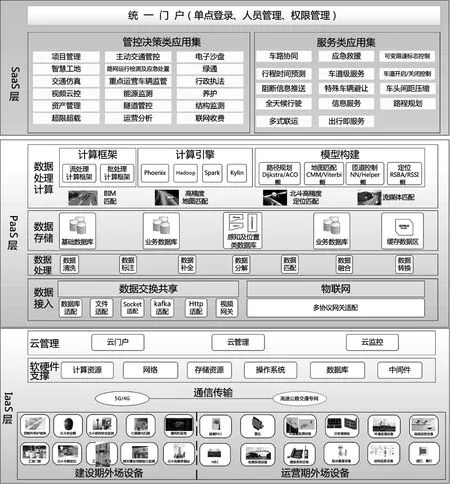
基础设施层通过建设期及运营期布设的各类外场终端,利用通信系统实现信息的上传及下达,依靠威睿(VMWare)/OpenStack等云管理软件实现计算、网络、存储资源的按需动态、弹性分配,同时配置操作系统、数据库、中间件向各类应用提供基础软件环境。
支撑层完成数据工程作业,实现数据与应用的分离。依靠数据交换共享技术和物联网技术完成数据资源的全量、实时地“收集”;通过数据处理,完成数据清洗、标注、补全等数据处理工作;经过清洗的数据按其属性进行分类入库操作,完成数据存储工作;数据处理计算则是在计算框架的牵引下,利用各类计算引擎,按照业务特性进行模型构建,最后与建筑信息模型(Building Information Modeling, BIM)、高精地图、流媒体等数据进行匹配,生成定向封装的数据服务,支撑业务系统工作开展。
服务层则是按照对象的不同分为管理决策类应用集及服务类应用集两部分,各类应用按业务流程、职责分工、时效要求,完成具体业务工作。
本文利用开源应用容器引擎(Docker)相互隔离、按需提供资源、快速部署的特性,作为云控平台技术实现路径。采用容器引擎(Docker)技术,搭建以单一主节点为核心容器,辅以多个工作节点的云控平台基础设施,工作节点通过套接字(Socket)或者RESTful API与主节点容器进行通信,实现服务的构建、运行和发布。通过加载镜像仓库中的镜像创建容器,其可被启动、开始、停止、删除,且容器间相互独立,可保证平台的整体安全。容器可读可写,镜像则为只读,二者可在同一个集群中运行,也可以实现跨主机的远程通信。
4 结语
本文主要针对车路协同环境下云控平台的架构设计进行研究,调研大量文献,总结现有云控平台的发展现状及应用情况,结合作者多年从业经验,对其进行场景扩充。紧贴高速公路运营管理单位需求,在充分分析其应用场景基础上,抽象出评价分析、预测仿真、协同控制、综合展示四个功能模块,并进一步提出云控平台的技术架构,提出了采用容器引擎(Docker)技术,按照基础设施、支撑、服务三层结构构建云控平台技术架构。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
知识窗(2017年8期)2017-08-23
魅力中国(2016年42期)2017-07-05
科技与创新(2016年4期)2016-03-16
中国科技纵横(2012年2期)2012-02-27
小天使·四年级语数英综合(2011年4期)2011-06-30
人民周刊(2009年12期)2009-01-25