基于ESP的模糊PID和PID控制策略对比
2022-09-16 03:28冯艳红陈林彬
汽车实用技术 2022年17期
冯艳红,唐 岚,陈林彬,陈 诚
(西华大学 汽车与交通学院,四川 成都 610039)
当汽车处于一些极限工作状况的时候,由于环 境的影响,使得汽车发生转向不足或者转向过度,由此极易导致交通事故。电子稳定系统(Electronic Stabilization Program, ESP)则可以通过对车轮的制动力进行调节,来抑制或者减小汽车产生的不良转向。本文通过Simulink设计了加入控制器的ESP模型,并且与CarSim的整车模型进行联合仿真,对得到的附加横摆力矩进行单轮分配。分别以正弦信号以及角阶跃信号作为转向盘输入,通过观察汽车的横摆角速度来判断汽车的稳定性。
1 控制变量
ESP的主要作用是当汽车处于失稳状态时,调整汽车的制动力,以此来改善汽车的稳定性。直接调节表示稳定性的横摆角速度和质心侧偏角较难,但是控制与其相关的横摆力矩就相对比较容易,通过控制横摆力矩进而控制其制动力,提高汽车的稳定性。与质心侧偏角相比较,横摆角速度不仅能够体现车身稳定状态,而且可以体现其转向情况,得到的方式也极其方便,因此,本文选用其作为控制变量。
2 仿真模型的建立
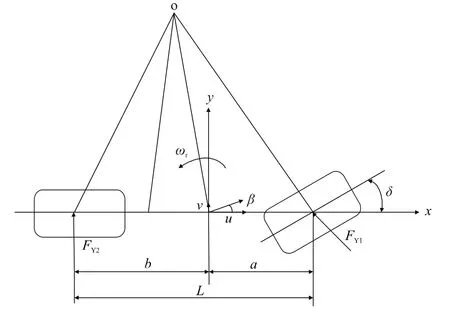
以汽车的线性二自由度模型为车辆稳定性控制的参考模型,建模的时候忽略转向系统、悬架作用、空气动力及轮胎偏侧特性的影响,将其简化,如图1所示。
通过二自由度汽车模型可知其微分公式为
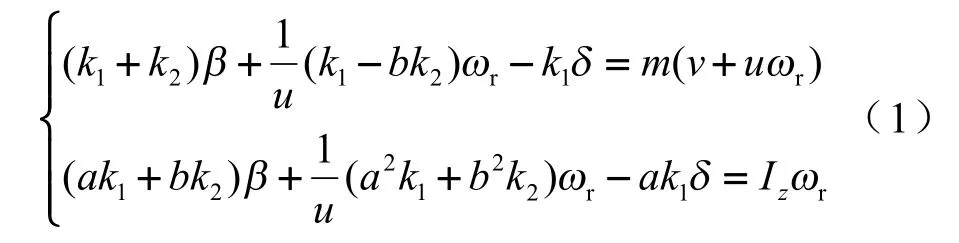
式中,、为质心到前、后轴距离;、为前、后轮的侧偏刚度;为整车质量;为纵向速度;为侧向速度;为横摆角速度;为前轮转角;为横摆转动惯量;为质心侧偏角。
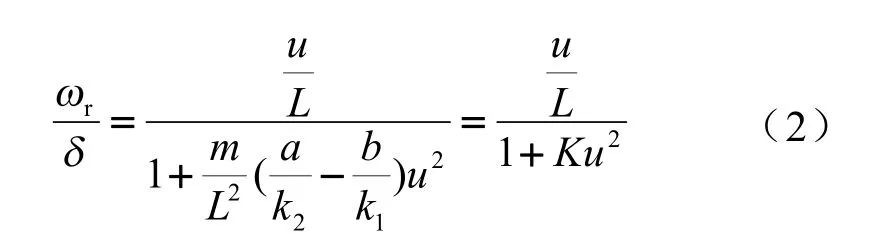
当汽车处于稳态时,其横摆角速度为定值,此刻的=0,=0,将这两个值代入方程式中消去,即可得到稳态横摆角速度增益。

3 ESP控制系统设计
3.1 ESP的PID控制算法
比例-积分-微分(Proportion Integral Differential, PID)的结构图如图2所示,其在ESP中主要是将理想横摆角速度和实际横摆角速度作比较,对两者的差值进行一系列处理,以此得到附加横摆力矩∆。
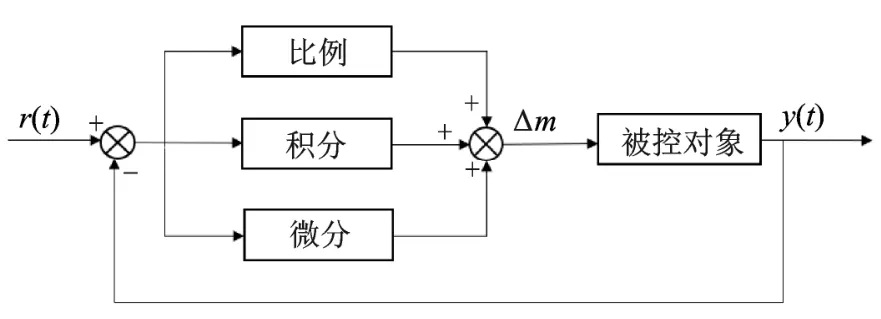
其涉及到的公式为
式中,为比例系数;为积分系数;为微分系数。
3.2 ESP的模糊PID控制算法
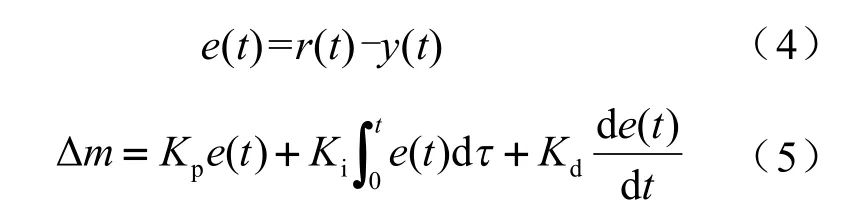
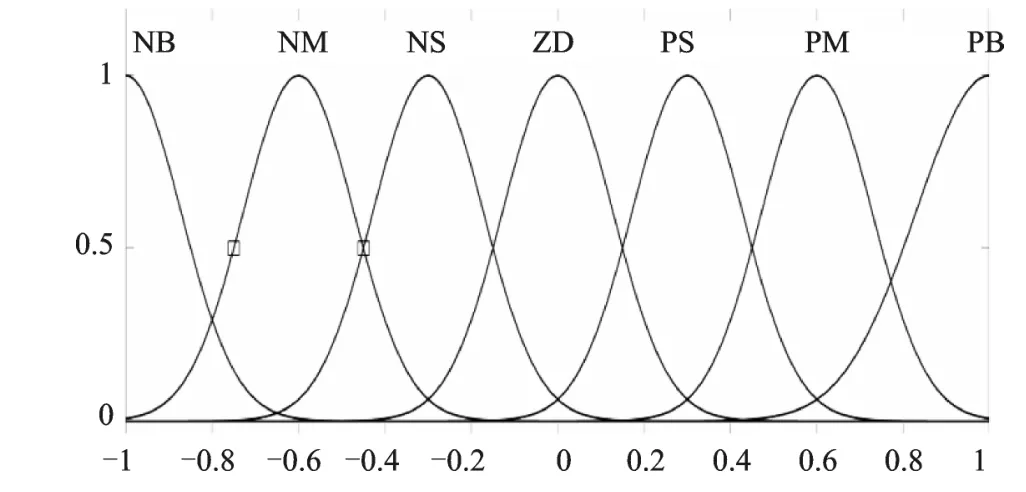
本文所涉及的模糊PID的结构图如图3所示,以理想横摆角速度与实际横摆角速度之差,以及这个差值的变化率为输入,附加横摆力矩为输出。分析汽车运行状态以及经验,得到输入和以及输出,,的隶属度函数和分布,如图4所示。

3.3 ESP的制动力矩分配策略
ESP通过对制动力的调整实现汽车行驶状态的修正,对不同的车轮施加制动力,产生的修正横摆力矩的大小与方向也有所不同。制动力分配策略表如表1所示,其中前轮转角是正值时代表左转。
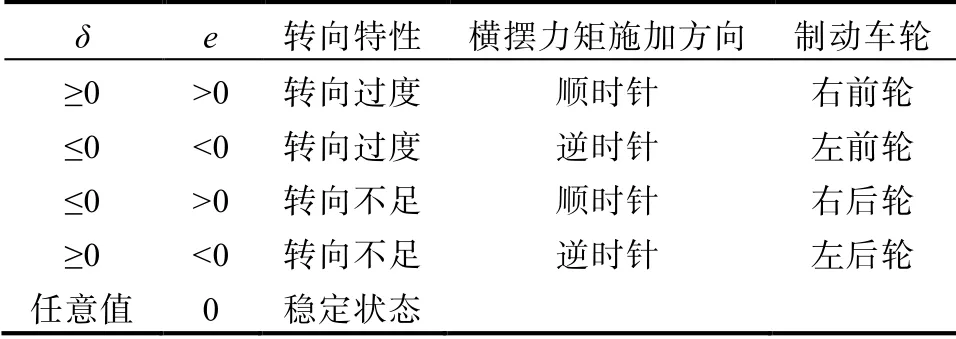
通过以上分析,可以得到附加横摆力矩的分配情况为

式中,∆为附加横摆力矩;为左右车轮距离;为质心到前轴的距离;∆为前外轮制动力;∆为后内轮制动力。
4 仿真分析
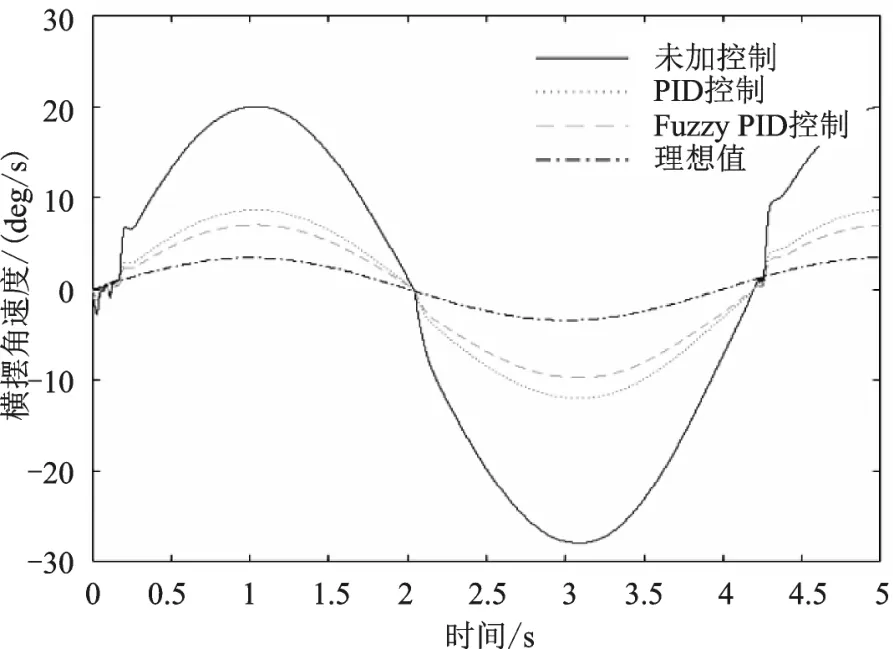
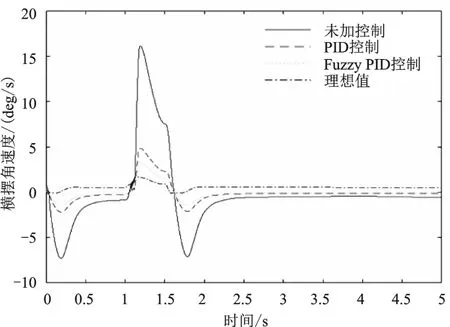
本文通过CarSim与Simulink联合仿真,以正弦信号和角阶跃信号作为方向盘的输入信号,采样时间均为5 s,得到的仿真结果如图5、图6所示。从图中可以得知,当前轮转角为角阶跃输入信号下,在未加任何控制的情况下,横摆角速度达到20°左右,加入PID控制后,横摆角速度下降了10°,而在引入模糊PID控制后,横摆角速度下降了15°,非常接近理想值,有相对较好的控制效果。在角阶跃输入信号下,未加控制的横摆角速度为15°,而加入PID控制后,得到的横摆角速度下降了11°,但是在加入了模糊PID控制后,车辆的横摆角速度下降了13°,更加靠近理想值。综上所述,模糊PID的控制效果很大程度上优于PID控制,同时也能够看出在模糊PID控制下的横摆角速度跟踪效果较PID控制下的跟踪效果好,较好地提高了汽车的稳定性。
5 结束语
本文利用Simulink搭建了ESP控制模型,设计了PID控制器以及模糊PID控制器,通过Carsim对方向盘进行正弦信号以及角阶跃信号的输入设计,通过与Simulink进行联合仿真,以此对两者的控制效果与理论值进行比较。通过验证,模糊PID控制器的控制效果比PID的控制效果更好,这将对ESP后面的研究起到一定的帮助作用。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
山东青年(2016年12期)2017-03-02