垂直截割工况下掘进机振动特性研究
2022-09-23 07:00赵成龙
机械管理开发 2022年9期
赵成龙
(晋能控股煤业集团高山煤业有限公司,山西 大同 037000)
引言
矿用掘进机不仅可以实现煤岩的截割、破碎,还可完成装载及运输等工作,其组成部分含有截割机构、行走机构、刮板运输机、液压系统、电气系统、机架等,其中截割机构又叫作工作机构,主要用于煤岩的破碎动作,还可形成满足要求的任何巷道断面形状;装载机构是经刮板或三爪星轮将截割破碎的煤岩进行运动集装,利用刮板输送机输送至转载机上;行走机构作为掘进机的整个连接支撑基础,同时也是掘进机驱动行走的执行机构;以高压油为动力源的液压系统,是利用液压马达及液压缸来对掘进机的各个部位进行驱动[1];电气系统主要是掘进机提供动力,进而对各个电动机的运行进行控制,另外,还可进行短路、漏电、过载、失压、断相等保护,以及作为工作预警信号;机架是用来支撑、安装和连接掘进机的各个系统部件。截割部主要组成部位含有截割电机、截割头、截割减速器等,作为二级行星齿轮传动的截割部,经过齿轮连轴节将电动机输入的动力传送给截割部减速器,通过悬臂段再将动力传送至截割头,经过截割头的升降、旋转及回转台的水平摆动截割完成煤岩的破碎动作[2]。由此可见,掘进机的截割头作为破碎煤岩的主要工作机构,在截落煤岩时会受到剧烈的振动冲击,进而影响掘进机的稳定运行。掘进机截割部在掘进时的运动形式有回转水平摆动和垂直截割两种形式,本文主要分析的是垂直截割工况下掘进机的振动特性,进而提升掘进机的可靠性和工作效率,降低故障发生率。
1 掘进机工作原理及其动力学模型分析介绍
掘进机是利用行走部件驱动整机完成掘进机的进给和后退动作,当掘进机到达截割作业面后,利用升降油缸悬臂来进行截割高度的调整,回转、升降油缸带动截割臂左右、上下摆动截割,同时旋转截割头,并在截割头的作用下完成煤岩破碎动作。在掘进机截割过程中,先在行走机构或伸缩油缸的驱动作用下,截割头纵向伸入煤岩表层一定距离后,并沿水平方向的一侧摆动截割臂,到达预设的边界后,在垂直位置上截割一定高度的煤岩,再反向水平截割,直至达到另一边的截割预设边界,再循环竖直、水平截割,这样多次往复动作,直至整个工作面的截割作业结束,由此,随着掘进机的掘进,持续重复上述进程,最终完成整个巷道的掘进[3]。
对于掘进机垂直截割工况下的动力学分析,本文是将掘进机截割臂作为弯曲振动悬臂梁考虑,将截割头作为截割臂末梢的集中力量考虑,而将在破碎煤岩过程中截割头受到的阻力分解为两个正交方向上的阻力。此外,还将掘进机机身、回转机构分别作为两个质量块考虑,将掘进机推动力作为作用在机身上的推动力考虑[4],通过设立以上模型,便于分析掘进机在垂直截割工况下的动力学特性,进而深入了解掘进机在工作时的特征。
2 垂直截割工况下掘进机振动特性分析研究
本文掘进机设定研究参数机身质量M1为3×104kg,回转调高机构质量M2为2.65×103kg,m为7×103kg,截割头质量m为1.5×103kg,机身行走机构与巷道的连接刚度系数k1为1.2×106N/m,机身后支撑机构与巷道的连接刚度k2为0.8×106N/m,回转调高机构和机身的连接刚度k3为0.4×106N/m,机身行走机构与巷道的阻尼系数c1为1.25×104Ns/m,机身后支撑机构与巷道的阻尼系数c2为0.8×104Ns/m,回转调高机构和机身的阻尼系数c3为0.4×104Ns/m。
通过采用Matlab软件对掘进机在垂直截割工况下的动力学进行分析,得到下页图1和图2所示的掘进机机身和回转机构在垂直方向上的振动响应。图1中,在初始工作阶段,掘进机垂直振动状态为上下波动的振动形式,一段时间波动后,机身趋于稳定振动响应,且其在垂直方向上的振动位移波动范围在-4.1~4.1 mm之间。
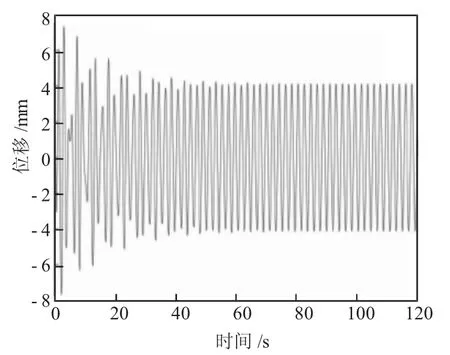
图1 掘进机机身垂直方向振动位移变化曲线
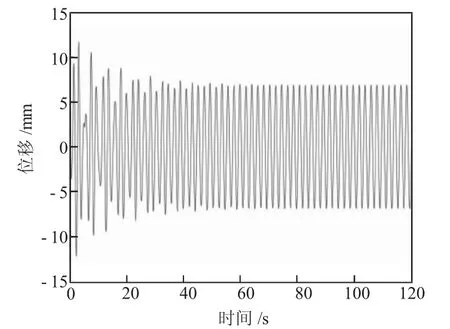
图2 掘进机回转机构垂直方向振动位移变化曲线
图2中,掘进机回转机构竖直振动量在初期阶段,波动状态比较大,随后振动状态逐渐趋于稳定,稳态下的振动范围在-6.8~6.8 mm之间。由于掘进机截割头在破碎煤壁过程中,产生的负载激励作用由截割臂、回转机构最后转至机身,从图1和图2对比可看出,掘进机回转机构产生的振动量大于机身,且机身和回转结构的振动响应区域均呈现周期稳定变化。
采用上述同样的方法分析掘进机垂直截割工况下的动力学,掘进机机身进给方向的振动响应及截割臂的振动响应变化情况如图3和图4所示。图3中,掘进机在截割煤岩前进过程中,在初始状态下机身产生剧烈的振动变化形式,随后逐渐趋于稳定,并成三角函数波动,且振动响应在-4.7~4.7 mm范围内。
图4中,掘进机截割臂振动响应趋于稳定的三角函数波动状态,振动区间在-11~11 mm,且截割臂末端振动波动位移在-27.8~27.8 mm范围内。从图3和图4对比可知,掘进机截割臂振动比较剧烈,受影响程度也较大。
3 结论
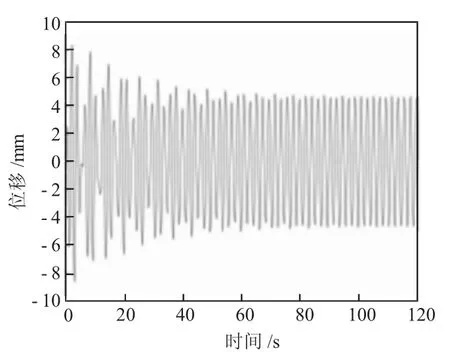
图3 掘进机机身水平方向振动位移变化曲线
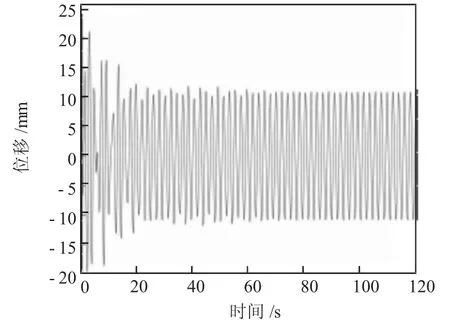
图4 掘进机截割臂位移动态响应变化曲线
为提高掘进机工作的可靠性,从而降低井下故障率,本文主要对掘进机在垂直截割工况下的振动特性进行动力学分析,结论是:
1)掘进机初始工作阶段垂直振动状态为上下波动的振动形式,后趋于稳定,机身振动位移波动范围在-4.1~4.1 mm之间,回转机构在-6.8~6.8 mm之间,回转机构产生的振动量大于机身,且其振动响应区域均呈现周期稳定变化。
2)掘进机机身在前进方向的振动位移在-4.7~4.7 mm范围内,截割臂振动响应波动位移在-11~11 mm范围内,且均成稳定的三角函数波动状态。
猜你喜欢
西部探矿工程(2022年8期)2022-08-08
煤矿安全(2021年9期)2021-10-17
黑龙江科技大学学报(2021年5期)2021-09-26
农业装备与车辆工程(2021年8期)2021-08-28
科学与财富(2021年33期)2021-05-10
科技创新导报(2021年33期)2021-04-17
南方农机(2021年1期)2021-01-20
现代营销·理论(2019年10期)2019-09-10
中国新技术新产品(2016年20期)2016-12-08
山东工业技术(2015年21期)2015-11-04