极化格雷互补码探地雷达探测地下管线分布*
2022-10-22 03:36张宁李静霞徐航赵明瑞刘丽王冰洁
电子器件 2022年4期
张宁李静霞*徐航赵明瑞刘丽王冰洁
(1.太原理工大学新型传感器与智能控制教育部和山西省重点实验室,山西 太原 030024;2.太原理工大学物理与光电工程学院,山西 太原 030024)
城市地下管线的探测与绘制对于促进城建发展和保障民生至关重要[1-2]。对于有限的城市地下空间,管线大都以平行且走向不同的方式铺设。在此种铺设方式下,准确探测地下管线的位置与分布一直是管线探测的重点与难点。探地雷达作为探测管线的一种重要手段,其是利用电磁波在地下传输遇到目标时发生反射的原理进行探测的,具有快速、安全、简单、低成本和无损检测等特点[3]。
现有探地雷达主要采用调频连续波信号[4]、脉冲信号[5]、步进频率信号[6]和随机信号[7]作为探测信号。相较于前三种信号,基于随机信号的探地雷达受益于良好的随机性,可实现强抗电磁干扰测量[8]和无模糊探测[9]。随机信号具体包括噪声信号、混沌信号和伪随机信号。其中,伪随机序列因产生方法简单且易集成,具有良好的应用前景。然而,基于单一的伪随机序列会产生较高的旁瓣,导致强目标的旁瓣会将弱目标的主瓣覆盖,从而增大漏警概率。故为减少旁瓣,应当寻找一种低旁瓣甚至零旁瓣的发射信号。格雷互补码突破了传统的单一序列,基于两列信号自相关函数之和实现旁瓣抵消,从而实现弱目标增强。Alejos A V 等人[10-11]利用格雷互补码作为探测信号,结合单边带传输对现有噪声雷达系统进行改进,实现更好的动态范围检测和距离估计。作者所在课题组[12]采用格雷互补码作为探地雷达的发射信号,实现了地下管线的高信噪比探测,进一步证明了格雷互补码有助于提高地下目标的探测深度与精度。
上述常规探地雷达通常采用单一极化方式对地下目标进行探测,接收到的回波数据中仅携带部分信息,难以实现目标的准确识别。已有研究发现,电磁波的极化具有方向性,可用来确定目标的方向、倾角和形状等属性。此外,电磁波的不同极化方式对目标信号的滤波、增强和抗干扰等方面具有优势并且可以获得稳健的检测能力,提高物体的分辨能力。因此,探地雷达的极化属性被广泛关注并逐步从单一极化测量转到多极化乃至混合极化测量。Georgios P T 等人[13]通过不同的天线极化方式获得多极化数据,证明了多极化测量可以准确识别多方向性目标体的位置信息。吉林大学曾昭发课题组[14]提出多极化多输入多输出(Multiinput-Multioutput,MIMO)步进频率探地雷达系统,克服了目标截面和天线辐射的影响,有效提高了目标检测精度。吉林大学冯晅课题组[15]将极化步进频探地雷达系统与极化熵相结合,对地下不同特征目标进行识别。Shao Z L 等[16]提出了时域激发极化法,达到对地下管线的重建与定位的目的。Boniger U 等[17]将极化属性分析法与主成分分析法相结合,实现了对地下管线的三维重建。以上方法均证明了电磁波的极化属性在精确探测地下目标体上的潜力。尽管如此,现有方法对于走向分布复杂管线探测中存在的目标成像模糊以及虚假目标较多的问题仍未得到良好的解决且无实验验证。
本文提出以格雷互补码作为探测信号并结合极化组件获取极化数据。通过将一组格雷互补码的相关结果相加,实现旁瓣叠加为零,峰值信号加倍。同时结合地下管线的极化信息,实现地下管线的多极化测量,从而达到对地下管线的定位与分布成像。
1 极化格雷互补码探地雷达探测原理
1.1 格雷互补码的产生及特性分析
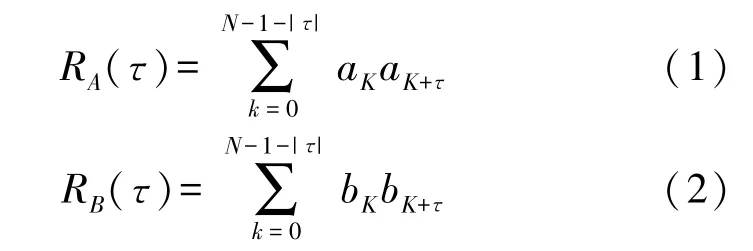
假设一组序列包含A=a(n),B=b(n),码长为N,非周期自相关函数分别为:
当除零位置点外,其自相关函数的和为零,即满足式(3)
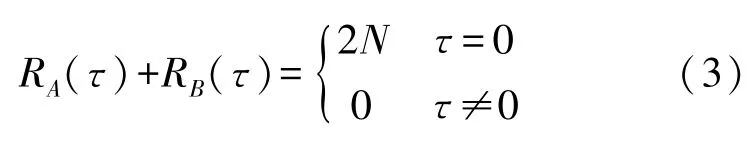
则称序列A和B是一对格雷互补序列。其中,单列码的旁瓣值约占峰值的10%,而通过将一对格雷互补码的相关函数进行相加,可以实现完全消除旁瓣,且峰值增大一倍,是一种理想的雷达信号。
进一步地,采用公式(4)的方式对码长为N的A码和B码进行K次迭代,则可以产生N×2K长度的格雷互补码序列。

根据仿真和实验环境,本文选择码长和频率分别为1 024 和1 GHz 的一对格雷互补码序列作为探测信号。图1(a)、(b)分别为A码和B码的时序,其脉冲幅值为0.1 V,最窄脉冲宽度为1 ns。图1(c)、(d)分别代表A码和B码的功率谱,带宽为1 GHz。格雷互补码的自相关曲线如图1(e)所示,由自相关曲线可以看出,叠加后的自相关曲线峰值扩大一倍,旁瓣完全抵消。
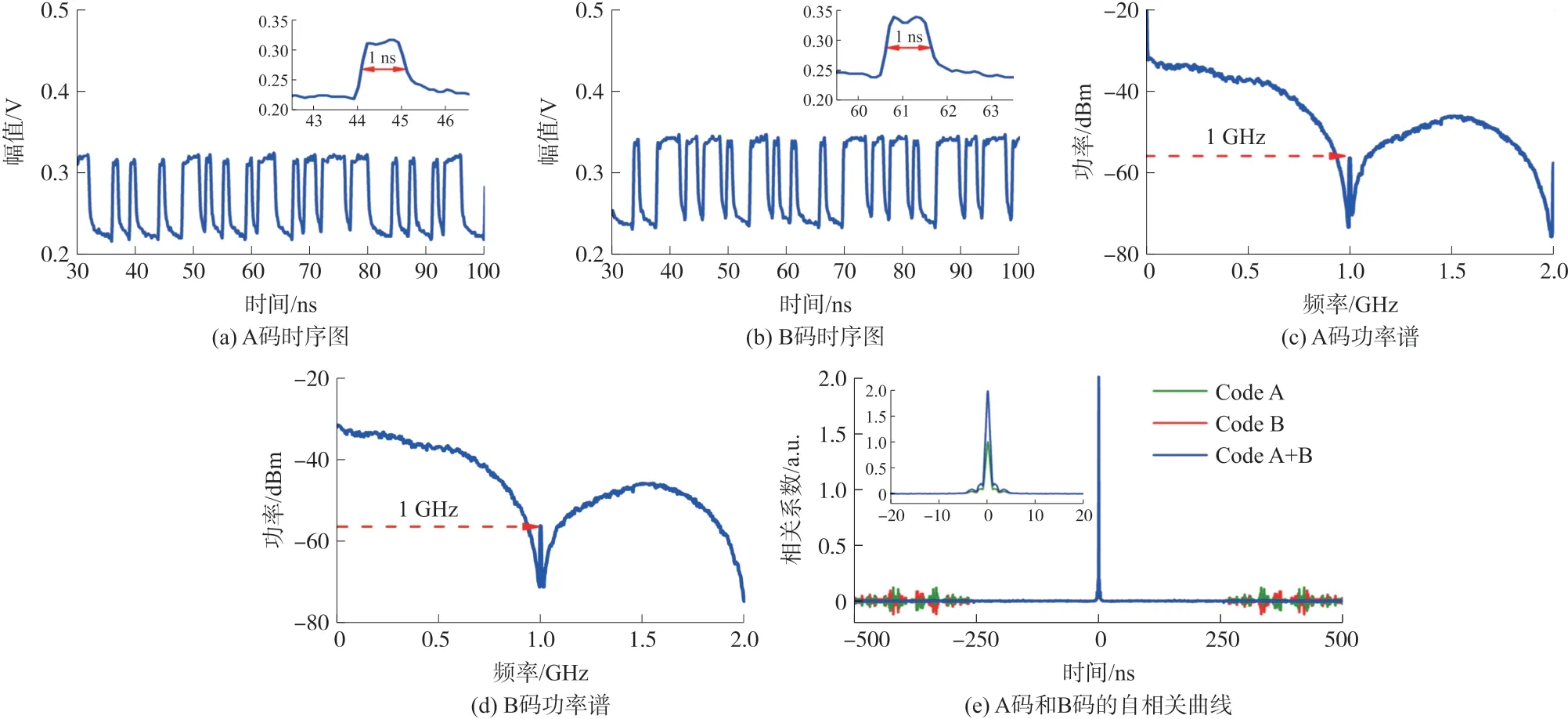
图1 格雷互补码特性
1.2 极化格雷互补码探地雷达测量原理
基于格雷互补码的探地雷达测量原理如下:雷达发射信号被功分成两路,分别作为参考信号和探测信号。参考信号直接送回至接收机,探测信号则经过雷达系统发射,再经目标反射后返回接收机中。因为信号经过目标体反射会产生时间延迟,因此通过将回波信号与参考信号做互相关可以计算出时延,进而求出管线的深度信息。
格雷互补序列A=a(n)和B=b(n)的互相关表达式分别如式(5)和式(6)所示:

上式中,⊗为相关算子,τ表示回波信号相对于参考信号的时延,k为相关系数,VAcorr(t)、VAref(t)、VAech(t)、VBcorr(t)、VBref(t)和VBech(t)分别代表A码和B码的相关信号、参考信号以及回波信号。采用相关法求得A码、B码的互相关信息后,将A码与B码的互相关函数相加,可使二者时间延迟τ所对应的峰值加倍并消除旁瓣。格雷互补序列A和B互相关函数相加公式为:

进一步地,沿测线(即雷达扫描轨迹)进行测量,可以获得二维成像结果。探测时,采用天线组合的方式,获取不同极化下的数据。不同天线的极化方式如图2 所示,其中,T和R分别代表发射天线和接收天线。当发射方向为X,接收方向为X 时,代表天线的XX 极化方式,如图2(a)所示。同理可依次获得天线YY、XY、YX 极化方式,如图2(b)~(d)所示。
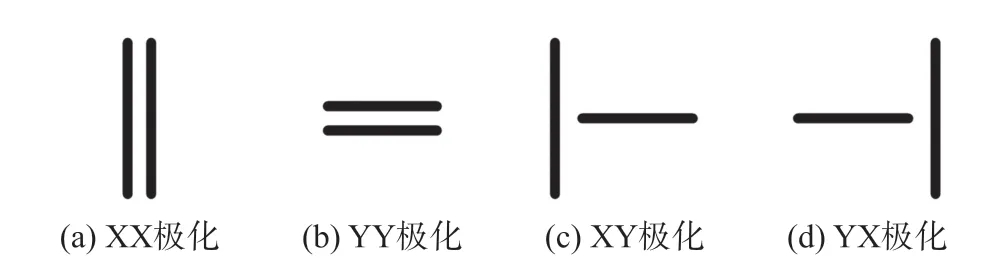
图2 不同天线极化方式
2 极化格雷互补码探地雷达仿真分析
2.1 一维轨线仿真分析
仿真基于时域有限差分法(Finite-Difference-Time-Domain method,FDTD)进行,对埋设于2 m×1 m×2 m(长×宽×高)干沙中的金属管线进行探测。金属管线直径、埋深、介电常数和磁导率分别为10 cm、0.5 m、300 m·N/C 和200 H/m~400 H/m,干沙的介电常数和磁导率分别为3 m·N/C 和1 H/m。信号源采用1 GHz 的格雷互补码信号,天线紧贴地表扫描,等步长2 cm 沿X 轴正方向轨线进行测量。
图3 显示了埋设单根金属管线模型。本仿真中,将天线设置在管线正上方并旋转360°,每5°测量一次。图4(a)、(b)显示了单根金属管线的全角度响应图。

图3 单根管线仿真模型

图4 单根管线全角度响应图
从全角度响应图的分布可以看出,采用共极化模式时,随着管线与天线之间角度的变化,散射能量变化较为均匀,因此在各个角度上均能够探测到目标响应。而当采用交叉极化模式时,散射能量随角度变化很大,当角度为45°或其倍数时散射能量达到最大。因此在探测不同走向和方向管线时可能会产生目标丢失,弱目标探测不明显的现象。由此说明,当探测地下管线等线性目标体时,共极化的探测方式优于交叉极化探测方式。
进一步地,研究不同走向分布的双根金属管线的极化响应,模型如图5 所示。将其中一根管线设置为与X 轴夹角为90°,另一根管线与X 轴为不同交角,设为α,分别采用XX 极化、XY 极化、YX 极化和YY 极化四种方式对其进行探测,结果如图6所示。
其中,图6(a1)~(a4)、(b1)~(b4)、(c1)~(c4)、(d1)~(d4)分别代表另一根金属管线与X 轴的夹角α为0°、30°、45°、60°的B-Scan 响应图。从B-Scan 响应图可以得出以下结论:对于材料相同、走向分布相同的管线,XX 极化和YY 极化中获得的信号响应强于XY 极化和YX 极化的信号响应且YY 极化的信号响应强于XX 极化。而对于同一种极化探测方式,不同走向分布管线的雷达信号强度不同。例如采用XX 极化方式进行探测时,管线在0°、30°、45°、60°延伸时管线的信号响应均强于90°,其中0°延伸时信号响应最强。信号响应强度随管线与X 轴的交角变化而呈现规律性变化。这说明当探测具有方向性的线性目标时,交叉极化会出现数据丢失的情况,考虑到散射效应,细长的圆柱线性目标如地下管线使用相互平行的共极化方式测量会产生更好的效果。因此,在进行管线分布探测时,应当优先考虑共极化方式探测。以下仿真和实验中,均采用XX 极化和YY 极化进行探测。

图6 金属管线与X 轴夹角分别为0°、30°、45°、60°的B-Scan 响应图
2.2 二维轨线仿真分析
基于以上一维轨线仿真的成像分析,将天线扫描范围扩展为二维轨线。仿真模型如图7 所示,分别对L 型金属和非金属管线进行探测。金属管线与周围干沙的基本参数与一维轨线仿真中设置相同。非金属管线的直径、埋深、介电常数和磁导率分别为10 cm、1 m、3.3 m·N/C 和1 H/m。天线紧贴地表扫描,天线之间的距离为2 cm,并以2 cm 的移动距离沿X轴正方向轨线运动,共获得20 道剖面数据,从每一道剖面数据的B-Scan 中可以确定管线的位置信息。将所获得剖面数据进行三维数据插值即可得到三维多极化数据,再将三维多极化数据沿B-Scan 顶点做水平切片,即可得到地下管线的分布成像。
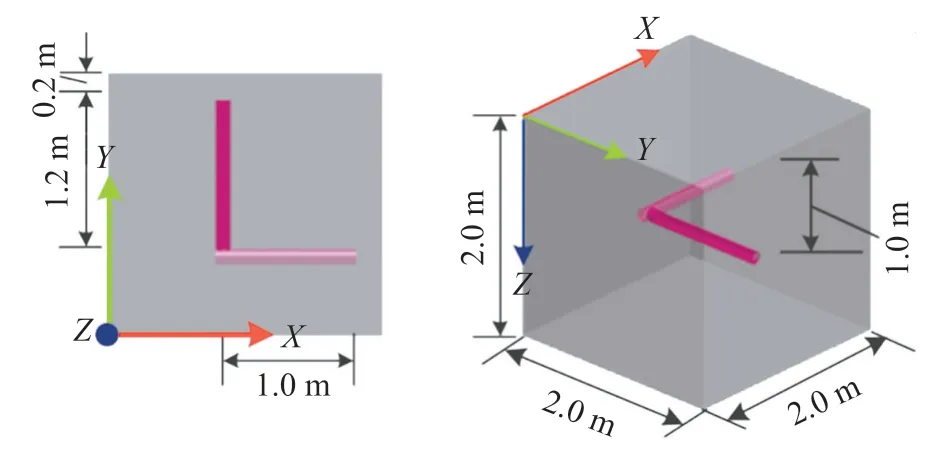
图7 不同走向管线仿真模型2
成像结果如图8 所示,图8(a1)、(a2)和(b1)、(b2)分别代表L 形金属管线和L 形非金属管线的XX、YY极化方式,图8(a3)、(a4)和(b3)、(b4)分别代表L 形金属管线和L 形非金属管线的极化合成图与三维显示图。从图中可以看到,不同极化方式对不同方向管线的散射能量不同,如图8(a1)、(a2)、(b1)和(b2)所示。在管线相交处散射强度大于任何一个地方的散射强度。非金属管线与金属管线类似,但由于非金属管线的介电常数远小于金属管线且与干沙的介电常数极为相近,所以整体散射能量较低。以上仿真结果表明:以格雷互补码作为发射信号并结合天线的不同极化方式可以对管线的分布清晰成像。
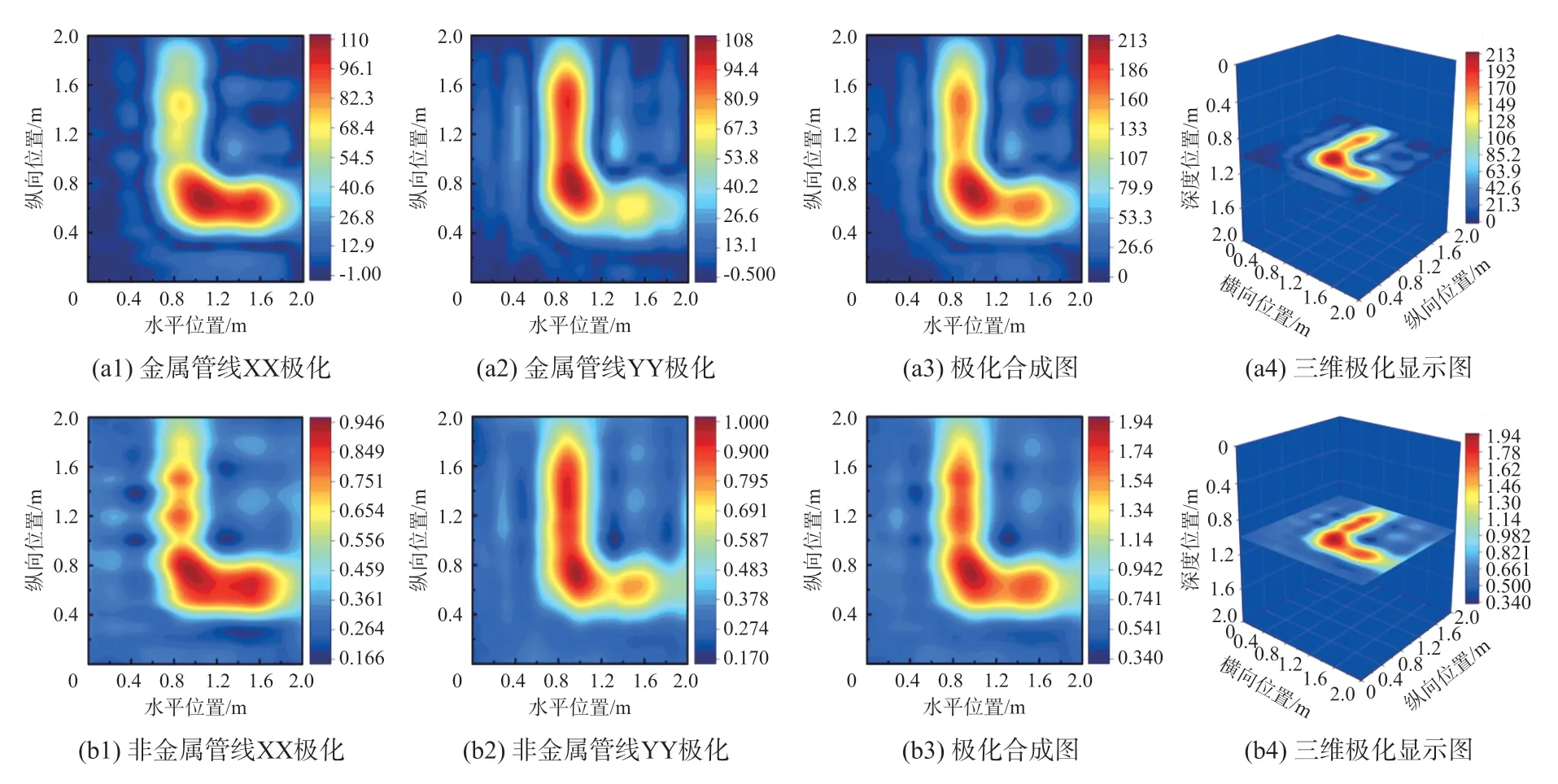
图8 金属管线与非金属管线不同极化显示图
3 极化格雷互补码探地雷达实验分析
仿真结果显示了极化格雷互补码探地雷达对地下管线走向分布精确成像的能力。在此基础上,本文采用极化格雷互补码探地雷达对地下管线进行了实验研究。图9 所示为实验装置图。在发射端,信号源产生的格雷互补码信号先经过放大器1 放大并与信号发生器产生的3.4 GHz 正弦信号混频后,再经放大器2 放大,最后向地下发射信号对管线进行探测。在接收端,接收信号先经过放大器3 放大,再经过功分器2 分成两路,随后分别经过放大器4 和5 放大,下变频进行IQ 分解,最后经过I 路和Q 路的低噪放大器放大后,示波器接收回波数据。其中,IQ 分解是为了获得更大的动态范围、提高测量精度和抗击共模干扰。
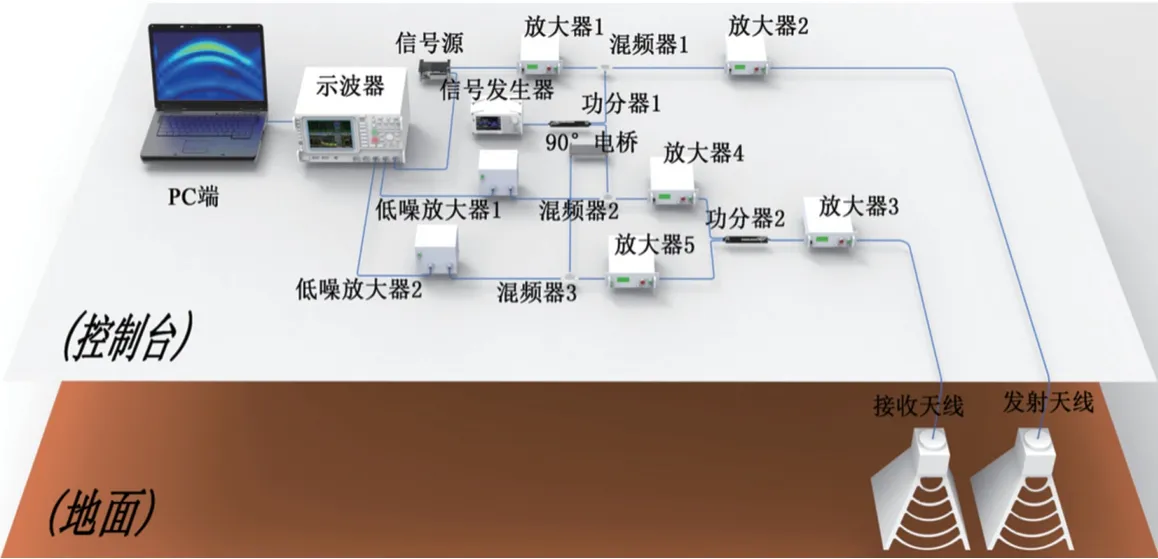
图9 实验装置图
实验中,T 型非金属管线埋设于2.0 m×1.2 m×0.8 m(长×宽×高)的干沙箱中,实验场景如图10 所示。其中,干沙的介电常数为4 m~6 m N/C,T 型非金属管线的埋深为38 cm,直径为20 cm,介电常数为9 m N/C。天线采用XX极化与YY极化两种极化方式对地下目标进行探测,发射和接收天线的间距为2 cm。

图10 实验场景图
实验结果如图11(a1)~(a3)所示,分别代表XX极化、YY极化以及极化合成图。由图可知,目标响应与管线实际位置一致。当采用XX极化时,横向位置所获取的极化信息多于纵向位置;当采取YY极化时,纵向位置所获得的极化信息多于横向位置。当将多极化信息结合时,可以反映出管线的分布特性,如图11(a3)所示,目标响应与周围介质区分明显,实验结果与仿真结果一致。
为了分析极化格雷互补码探地雷达的探测性能,将其与极化步进频率雷达进行了比较。实验中,将矢量网络分析仪用作步进频率雷达,信号频率范围为1 GHz~5 GHz,其他实验参数与极化格雷互补码探地雷达的参数相同。图12(a1)~(a3)所示为基于极化步进频率雷达的探测结果。将其与图11(a1)~(a3)进行对比可得,极化格雷互补码探地雷达与步进频探地雷达相比,后者的成像结果中虚假目标较多,目标响应较弱,因此,管线不能与周围背景介质进行较好的区分,进而无法准确对管线的走向分布进行辨别。而极化格雷互补码探地雷达可以实现对管线的走向分布进行明显的识别。此外,极化格雷互补码探地雷达的探测结果中目标位置与周围环境的色差更大,这意味着其具备探测更深目标的能力。

图11 极化互补格雷码探地雷达极化响应图
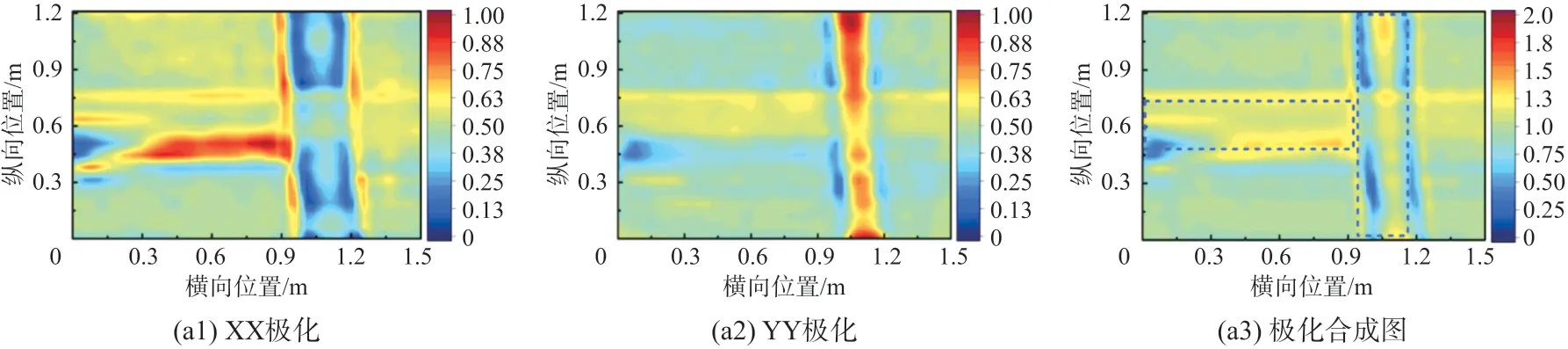
图12 极化步进频率探地雷达极化响应图
进一步地,采用四种无参考指标对极化格雷互补码与极化步进频率雷达系统成像结果进行量化分析。其中图像的信息熵[18]常被用来评价一个系统中的有效信息量。其定义如公式(8)所示:

式中:H(X)代表图像矩阵信息熵值。p(xi)表示图像矩阵中灰度值为i的像素数与总像素数的比值,n为图像的灰度值。应用到探地雷达成像上,熵值的大小可以用来反映图像中平均信息含量的多少,即目标体极化信息表现的多少。信息熵越大代表图像包含信息越多、图像质量越好。
平均梯度[19]是对图像局部色差的累计,平均梯度越大,代表图像细节反差越强烈,图像越清晰。其计算公式如式(9)所示:
公式(9)中M、N代表图像f(x,y)的行数与列数。
空间频率[20]作为一种图像矩阵评价指标,用于测量图像的整体活动性,其值越高代表图像所携带的信息量越多,细节表现能力越强。其定义为:

式(10)、式(11)、式(12)中,Z(n,m)代表图像在(n,m)处的灰度值。RZ和CZ代表图像的行频率和列频率。
边缘强度[21]是凸显图像局部变化的幅值,实质上是边缘点之间的梯度幅值,边缘强度越大,则凸显边缘越清晰,失真越小。其计算公式如式(13)所示:
式中:E(x,y)代表像素点边缘强度大小,f(x+m,y+n)表示相邻像素点的灰度值,M×N为所选窗口大小,mean(x-m:x+m,y-n:y+n)为所选区域的均值。以上量化指标计算结果如表1 所示:

表1 极化格雷互补码探地雷达与极化步进频探地雷达参考指标对比图
由表1 可知,极化格雷互补码探地雷达的信息熵、平均梯度、空间频率和边缘强度四个量化指标均优于极化步进频探地雷达。该结果表明前者所携带的目标信息多于后者,成像更加清晰。为了更加直观的对两种体制雷达进行对比分析,图13(a)、(b)分别给出了极化格雷互补码探地雷达与极化步进频探地雷达的三维成像显示图,从图中可以看出,相较于极化步进频探地雷达,采用极化格雷互补码探地雷达可以对管线的走向分布进行精准辨别与定位,且能够有效提高探测深度。
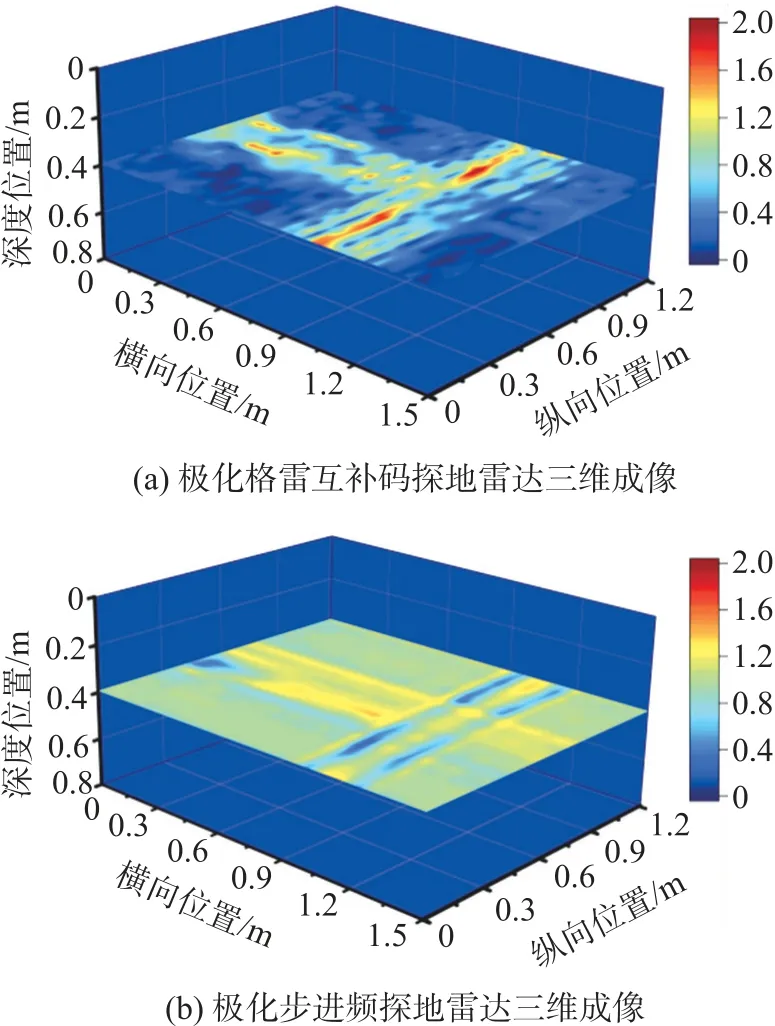
图13 三维成像显示图
4 结论
提出以格雷互补码与极化测量相结合的方法探测地下管线,实现对管线走向分布的精准探测。将格雷互补码作为探测信号,其具有良好的相关特性并且具有抗干扰性强和分辨率高的特点。而收发天线采用不同的极化方式可以根据目标属性和方向增强目标响应。本文分析了极化格雷互补码探地雷达的基本理论,并基于FDTD 对管线进行了一维和二维轨线扫描仿真。一维轨线仿真结果表明,格雷互补码作为探测信号结合极化探测可以对地下不同角度管线进行识别,不同极化方式可以表征管线的不同状态。二维轨线仿真结果表明,采用多极化方式可以对地下管线走向进行识别。除此之外,与传统的步进频信号探地雷达进行了对比,分别从图像信息熵、平均梯度、空间频率和边缘强度四个指标进行量化分析。实验结果表明:在同等条件下,极化格雷互补码探地雷达的探测效果更好,所获得的目标信息量更多,成像更清晰,同时目标极化信息损失较少,细节信息表现明显。本文为城市地下管线的分布探测提供了一种新方法。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
商业评论(2022年4期)2022-05-05
北京航空航天大学学报(2021年9期)2021-11-02
海军航空大学学报(2020年2期)2020-07-27
无线电工程(2020年8期)2020-07-25
航天电子对抗(2019年4期)2019-06-02
电子技术与软件工程(2017年12期)2017-07-05
城市地理(2015年24期)2015-08-15