自主可控多线激光雷达关键技术研究及实现*
2022-10-22 03:36王荣秀
电子器件 2022年4期
王荣秀
(重庆工商大学人工智能学院,重庆 400067)
激光雷达由于方向性好、抗干扰、探测速度快、精度高,特别是多线激光雷达能生成准确的三维点云,因此被广泛用于环境探测与感知,如汽车自动驾驶、飞行导航、地形或建筑物测绘等[1-2]。在自动驾驶领域,随着相关技术的进步及配套算法的开发应用,激光雷达体现出了独特的优势。毫米波雷达测距受到频段损耗的制约,无法感知行人,难以对周边障碍物进行精准建模;超声波雷达在短距检测上有一定优势,但不利于检测高速运动的物体且其回波串扰问题严重;视觉传感在检测精度和实时性方面还存在一定的不足,抗干扰能力较差;因此,以激光雷达为核心的环境感知技术更适用于汽车自动驾驶,激光雷达已成为自动驾驶技术的核心装备[3-4]。
激光雷达是一个光、机、电的融合体,其产品的设计与实现还存在许多有待解决的问题,尤其是国内产品与国外产品还存在不小的差距。虽然基于MEMS 的固态激光雷达与光学相控阵雷达是研究热点,但技术尚不成熟,没有达到大面积使用的程度。机械扫描式激光雷达是目前市场上应用最广泛的激光雷达,但还有许多技术细节有待革新,同时价格昂贵,主要技术专利被国外公司垄断,因此开发具有自主知识产权且性能优良的激光雷达势在必行。
本文主要围绕激光雷达系统的实现展开,以机械式整体旋转扫描的32 线激光雷达为研究对象,分析其系统原理、系统组成及技术难点,探索其核心技术问题并给出解决方案;同时给出其在自动驾驶环境感知中的应用例子,具有很大的推广价值和意义。
1 系统基本原理与构成
1.1 系统原理
在环境探测中,激光雷达通过光子的来回运动测量距离,并利用激光良好的准直性获得目标物的空间方位。由于脉冲激光峰值功率高,发散角较小,脉冲持续时间短,测距量程大、速度较快且无需合作目标,这使得脉冲激光测距在探测距离和测量精度上具有显著优势[5-6],尤其适合对相对速度较大的运动物体进行实时测量。
脉冲式测距原理如图1 所示。激光以一定频率发射脉冲光波,计时电路记录下发射时刻t1和目标物反射回波的接收时刻t2,从而得到两个时刻的差Δt=t2-t1,则目标物与激光系统的距离R可表示为
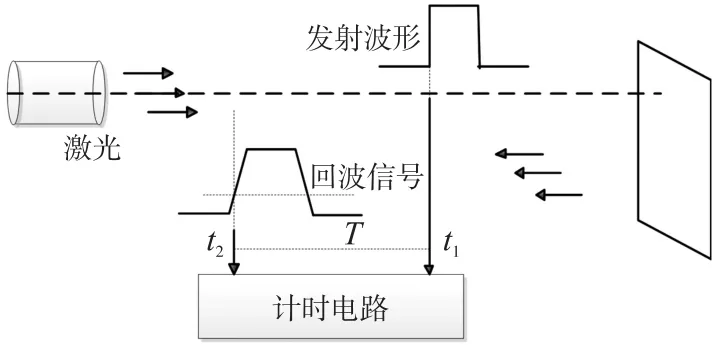
图1 脉冲激光测距示意图

式中:c为光速,n为空气的折射率。
由式(1)可知,激光雷达测量的准确性主要取决于时刻t1和t2的精准度,同时目标物的方位则由激光雷达扫描光束在水平方向及垂直方向的分辨率决定。在实际应用中,激光雷达测距还受到许多其他因素的影响,如系统时钟频率、介质(主要是空气)对光信号的衰减、目标物表面对光波不同角度的反射或散射引起的波形畸变或脉冲展宽,以及信号在电路处理过程中的延迟等。
1.2 系统构成
三维激光雷达系统由光学单元、机械单元、电路单元三大部分组成。光学单元主要是光学望远镜,包括发射望远镜和接收望远镜。机械单元包括由壳体、电机组件及无线供电/数据传输的电路组成的旋转部件。电路部分包括:脉冲供电激光发射阵列、脉冲供电接收阵列、计时及主控电路、供电及无线数据传输电路等,系统框图如图2 所示。
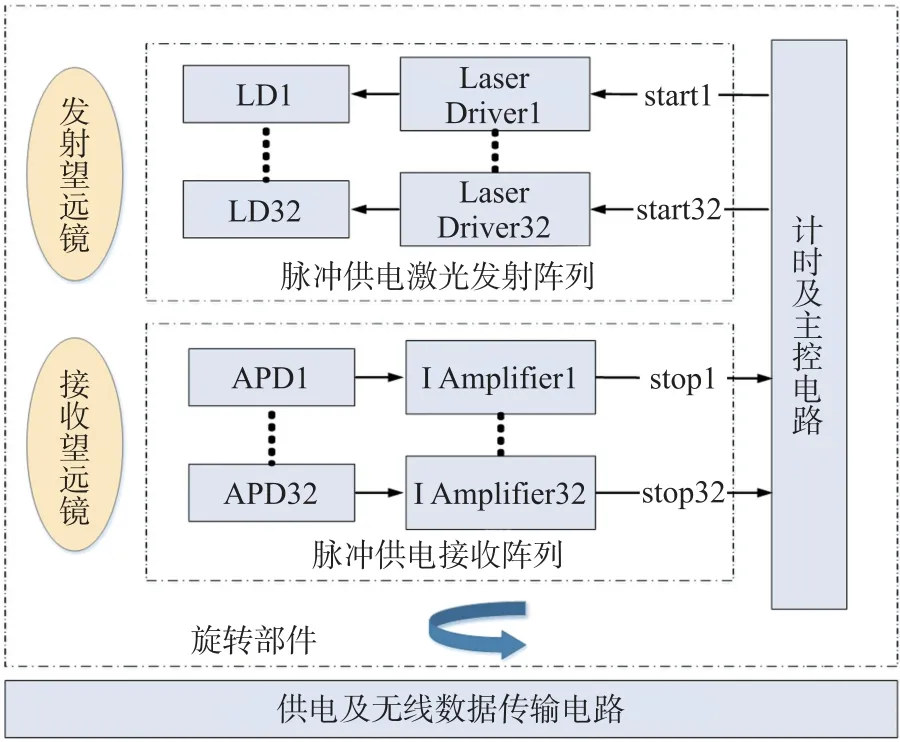
图2 激光雷达系统组成框图
各模块功能及系统工作流程如下:
(1)供电及无线数据传输电路:为系统供电及通过无线传输为旋转部件供电、控制电机带动旋转部件旋转、通过无线数据传输与主控电路通信。
(2)主控电路:控制系统发光时序,实现发光测量。接收计时信号并计算距离,进行距离修正,将距离信息通过无线数据传输给供电及无线数据传输电路。
(3)脉冲供电激光发射阵列:产生脉冲电流使LD 发光,产生纳秒级脉宽的光信号。
(4)发射望远镜:将光信号准直、整形并投射在被测物体上。
(5)接收望远镜:将反射光信号经滤光系统和聚光系统汇聚在APD 光敏面上。
(6)脉冲供电接收阵列:进行光电转换,形成电流信号,再经电路放大后输入后级处理电路。
(7)计时电路:通过阈值设定和比较电路,获得接收波形上的准确时间,对波形进行整形;从发光时刻开始进行计时,到时刻鉴别之后计时结束,获得两者之间准确的时间点;并将时间信息发送给主控电路。
2 系统设计难点及解决方案
在系统的设计过程中,主要解决了5 个关键性的技术难题:高精度激光回波信号的时刻判别方法;半导体激光脉冲的高重频、高频响、高峰值电流驱动技术;高带宽、高增益、低噪声接收电路的设计;分时点对点激光发射与接收的抗回波串扰技术;三片式低像差小F 数的接收望远镜光学系统设计。
2.1 基于双阈值回波信号起始点判别的高精度时刻鉴别技术
前沿鉴别法将输入信号与固定阈值进行比较,判断出过阈时间,从而得到回波到达接收器的时刻。相比于其他时刻鉴别法,前沿时刻判别法的优点是简单快速、动态范围宽且电路代价低,因此易于实现,但由于脉冲回波不可避免地存在幅度降低、波形畸变、脉冲展宽等现象,再加上处理电路的信号延时,从而使前沿时刻鉴别法有较大的误差[7-9],如图3 所示。
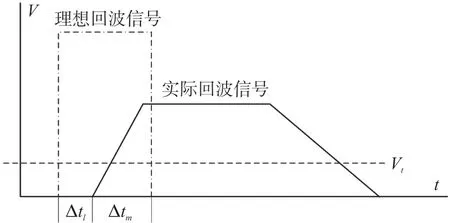
图3 前沿鉴别时刻误差示意图
其中Vt为阈值,Δtl为延迟误差,Δtm为空气及目标物表面的几何形态与表面性质引起的漂移误差。若对出射光波与回波采用相同结构与性质的电子电路来处理,则Δtl一般可消除。漂移误差Δtm则受外界不可控因素的作用,是不可避免的,因此如何采用有效的方法减少Δtm是提高测距精度的关键技术之一,也是国外各大激光雷达供应商的核心技术机密。项目组在研究中发现尽管接收到的回波信号幅度、脉冲宽度等发生变化,但同一距离脉冲回波信号的起始点是不发生变化的,与回波幅度、反射面、入射角度等因素无关,因此只要能准确回溯接收信号的起点就可获得准确的脉冲到达时间,这样可从根本上去除时刻鉴别误差。一种简单有效的方法是利用双阈值技术测量脉冲信号上升沿斜率,从而推算出接收信号的起点,如图4 所示。
显然,由图4 可知,回波信号的接收时刻t可由式(2)得出:
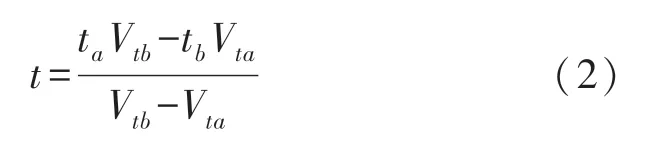
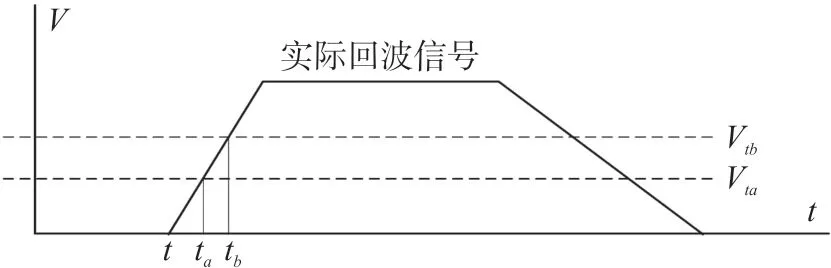
图4 脉冲信号起始点的双阈值测定
实际设计时低阈值Vta选取的原则为大于太阳光等造成的噪声。高阈值Vtb的选取原则是使测距最大时(系统设定200 m)的回波信号能够触发。本项目中高低阈值分别设为2 V 和150 mV。
2.2 高重频、高频响、高峰值电流半导体激光脉冲驱动技术
系统中采用的激光管是SPL PL90_3,是一款纳秒级脉冲激光二极管,可发射中心波长为905 nm 的红外光。其内部发光材料为InGaAs/InGaAs,有效发光面积为200 μm×10 μm,峰值额定功率为75 W,对应驱动电流峰值为40 A。常见的TO 玻璃封装直径为5.9 mm,不能满足设计需求,项目中采用了管芯封装技术,电路板采用0.4 mm 的厚度,封装后电路板与激光器不超过1 mm,满足了排布需求。
激光脉冲上升沿时间影响测量精度,上升沿时间越短,测距误差越小;激光脉冲功率决定测距能力;而重复频率决定了单位时间的测量点数。兼顾高重频、快速脉冲上升时间和大驱动电流是半导体激光器驱动的难题[10]。传统的窄脉冲激光驱动采用大电容储能、高速功率管控制放电电流和持续时间,其缺点是大电容充电时间较长,在kHz 的高重频下不能将电容充满,无法达到满功率工作[11]。
项目提出了采用高压对小电容充电的方法,实现大驱动电流的同时提高了重频。本系统中设计的激光驱动阵列中单路激光驱动原理图如图5 所示:
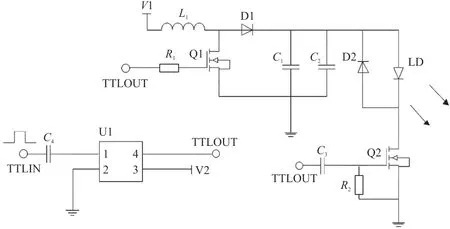
图5 激光驱动原理图
TTLIN 信号是由主控系统提供的发光起始脉冲,C4的作用是起到隔直的作用,防止TTLIN 误提供持续的高电平,导致激光驱动发生损坏;U1 是MOS 管驱动芯片,为MOS 提供栅源电压,提高驱动能力;当Q1 导通时,V1 将通过电感对地放电,产生较大的电流,此时Q2 也导通,但C1、C2没有存储能量而激光不会发光;当Q1 关闭时,电感将通过D1对C1、C2电容进行充电,当充满电后C1、C2的电压远大于V1;当脉冲再次到来时,Q2 导通,C1、C2通过LD 进行放电,激光管瞬间发光,产生较大的瞬时功率,依次循环。
为了能够使激光驱动产生40 A 的峰值电流,Q2 必须选用DS 导通电流能够通过40 A 的MOS管,这项指标一方面受MOS 本身限制,另一方面受MOS 的VDS 电压限制,通常DS 电压越高,MOS 管的DS 导通电流越大。
由单路激光驱动的原理可见,激光驱动所需高压并不是持续存在的,当需要发光时,高压随控制信号的到来而升高,当发光结束后,高压随即消失,这样激光驱动便不会产生额外的功耗。实测在18 kHz 的重复频率、70 W 的峰值功率情况下,单路激光驱动的功耗只有0.1 W,32 路的驱动阵列功耗只有3.2 W。而激光驱动阵列是系统当中的主要功率部件,此设计大大降低了功耗需求,减小了热量产生。
项目通过综合采用高速、高压MOS 管,调整放电回路的电路参数,缩小电容放电时间,完善了高重频、快速、峰值功率可高达100 W 的驱动模块,总体性能与国际著名激光驱动公司PicoLAS 的产品性能相当(性能比较见表1),并在最关键技术指标——脉冲上升时间方面更具有优势。
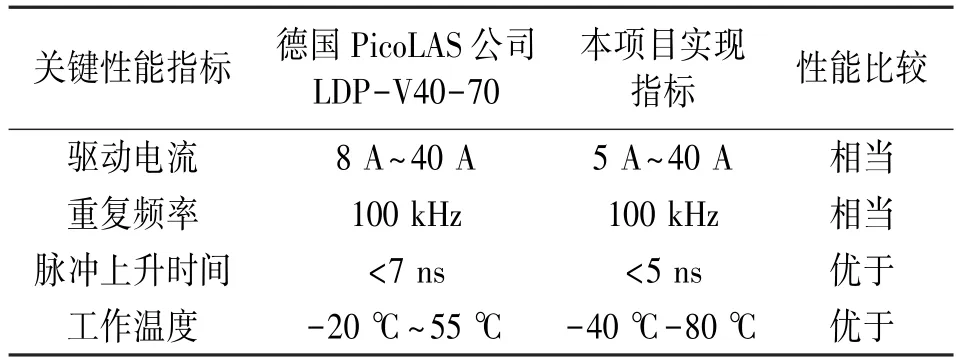
表1 激光驱动电路性能参数对比
2.3 高带宽、高增益、低噪声的接收电路设计
从激光测距的数学模型可知,激光发射功率和测距能力成正比关系,在不提高发射功率的前提下增加测距能力,给接收系统的信号处理能力提出了巨大的挑战。
为了获得更高的测距能力,信号必须被放大到足够被后级电路处理的幅度,因此对放大电路的增益要求很高,而对于放大电路来说,增益与带宽是相互制约的,增益越高,带宽越低,信号就会失真,导致测距不准确,并且噪声也会被随之放大。设计中采用了暗电流较低的“雪崩光电二极管”APD,型号为AD500-9,其光敏面面积为0.196 mm2,暗电流为0.8 nA,结电容为1.2 pF,灵敏度为52 A/W,输出信号上升沿为0.55 ns,带宽为500 MHz。其后通过选择高带宽、低噪声的集成运放设计,满足10%反射面,距离为100 m 的测距指标,在有噪声的情况下达到±3 cm 精度的设计指标。
2.4 分时点对点激光发射与接收的抗回波串扰技术
多线激光传感器与单线激光传感器的一个重要区别是多线激光传感器中存在多个发射和接收系统,如果同时发射,则脉冲回波必然相互叠加,接收器就会收到来自多个发射源的回波,从而产生信号之间的串扰,导致测量结果失真并降低系统工作效率。若采用机械隔离的方式,在光路系统中对每个发射器配备相应的接收器,只接收特定角度的反射回波,则可以基本解决信号相互串扰的问题,但其结构复杂,且不利于小型化。另一种方法是每个发射器选用不同频率的脉冲光,在接收回波时进行滤波处理,只允许频率匹配的回波通过,这样也可以达到消除串扰的目的。这种方法类似于消除多个超声换能器串扰所使用的相关匹配法[12]。其不足是电路复杂,实时性较差,难以实现,且对激光的单色性要求较高。在本系统设计中,我们采用多路激光发射和接收分时处理的方式,在同一时间段内,仅有一个激光器发射脉冲,保证接收器只接收单一脉冲的回波,同时采用“先发射先处理”的顺序。由于需要对激光发光和接收进行高速的选通,以避免在通道切换过程中引入计时偏差,我们选择ns 级偏差的选通器件。另外,各通道共用一个计时单元,有利于结构的小型化,提高设备的稳定性。
分时发射与接收方案中,要完全避免串扰还需解决“后发先至”的问题,也就是先发射的脉冲如果反射物较远,而后发脉冲反射物较近,则有可能后发脉冲的回波先于先发脉冲的回波到达接收器(或同时到达),因此在分时方案设计中必须消除这一问题。
考虑第i和第j个脉冲激光器,j>i,i先发射,如图6 所示。若接收器与发射器之间的距离远小于与被测物体的距离,可认为接收器与发射器到目标物的距离相等。设第i个脉冲发射于时刻ti1,接收于ti2,反射物距离为ri;第j个激光器于tj1发送脉冲,接收器于tj2时刻收到,反射物距离为rj;若接收器接收到回波并经电路转换与处理所需时间为Δτ,则容易得知,要避免前后回波信号之间的串扰应满足tj2-ti2>Δτ,利用式(1),可得

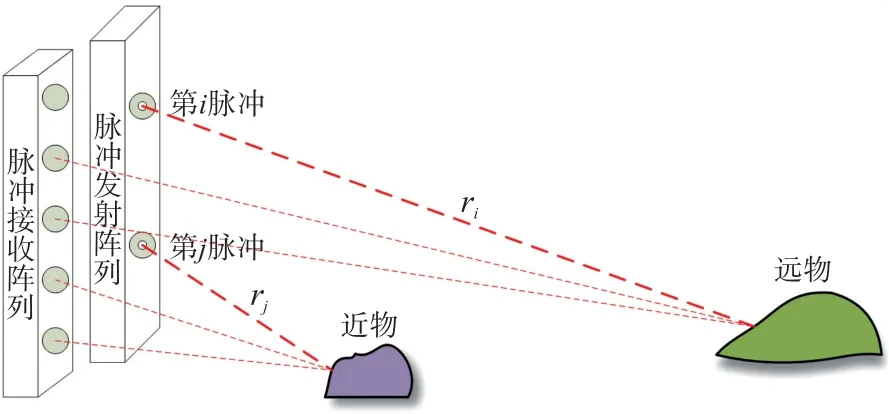
图6 后发先至引起的回波串扰
若任意两个相邻单元之间不产生串扰,则整个系统就不存在串扰,因此不失一般性,取j-i=1;同时假定测距系统的最大量程为Rm,则式(3)可简化为

由式(4)可确定各激光器脉冲间隔,即各通道切换频率。一般式(4)中右边第二项远大于第一项。若选用高速ns 级器件,则可取Δτ=10 ns,空气折率n≈1,最大测距Rm=200 m,可知取ti+1-ti≥1.5 μs,即相邻脉冲间隔不小于1.5 μs 就可完全消除串扰,因此各通道切换频率不超过0.75 MHz,本项目取值为0.66 MHz。
2.5 三片式低像差光学整形及小F 数的接收望远镜光学系统设计
半导体激光器具有体小质轻、结构简单、使用方便、对人眼安全、价格便宜、可电控等一系列优点,但不足之处是发散角大、发光截面积大等。因此在测距系统中,需对脉冲激光进行准直处理。传统的小孔整形方式易实现,但系统效率相对较低。为提高光束质量及系统效率,项目组采用了三片式的光学结构[13-14],如图7 所示。三片式的基本结构由二个分离并带胶合面的凸透镜和一个位于中间的凹透镜组成。三片式结构可保证场曲为0,且胶合面的折射率差可有效改善轴外像差,提高出射光边缘的质量,由此解决了半导体激光器整形问题,提高了系统效率。经测试系统效率达到66%,快慢轴发散角控制在3 mrad 内。
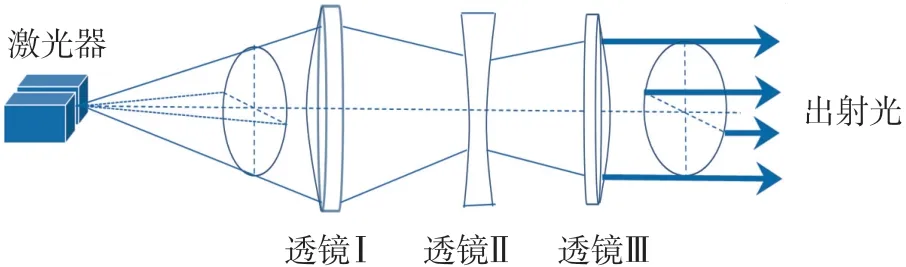
图7 三片式半导体激光器整形结构示意图
光学接收系统的接收效率直接影响了三维激光雷达的测距能力,而接收系统的焦距与光瞳大小又会影响到系统整体尺寸。F 数小的光学系统能使像面上接收到的光强更大且光学分辨率更高,这就要求较短的焦距与较大尺寸的光瞳,但实现困难且造价昂贵,光瞳尺寸过大也不利于系统小型化。为确保提高测距能力的同时减小系统空间体积,采用了F 数接近1 的设计思路,同时通过三组三片镜的结构有效减小系统特别是边缘视场的像差,提高光学接收系统的效率。
3 应用实例——车路协同智能感知系统
目前,自动驾驶在港口、矿区、物流园区、高速公路等封闭和半封闭场景相继落地,但是在城市场景却实现困难。主要原因在于城市场景中,道路开放,结构复杂,机非混行,密度大,行为差异显著,这对自动驾驶的环境感知能力有着更高的要求。目前,自动驾驶车载核心传感器感知距离有限,且为视距的类人感知,无法满足超远距离及交叉口、遮挡区等非视距环境感知需求。
为了突破自动驾驶车辆的远距离和非视距感知难题、提升车路协同基础设施的商业价值、实现5G与车联网的深度结合,项目组提出了路侧激光雷达+5G+边缘计算的车路协同智能感知系统,如图8 所示。车路协同智能感知系统集道路信息感知、数据存储计算、信息中继传输功能于一体,采用先进的传感器实现交通信息精确感知。利用边缘计算技术对感知信息进行分析处理,通过5G-V2X 通信,以极低时延将信息传输给周边车辆、移动终端及云端。
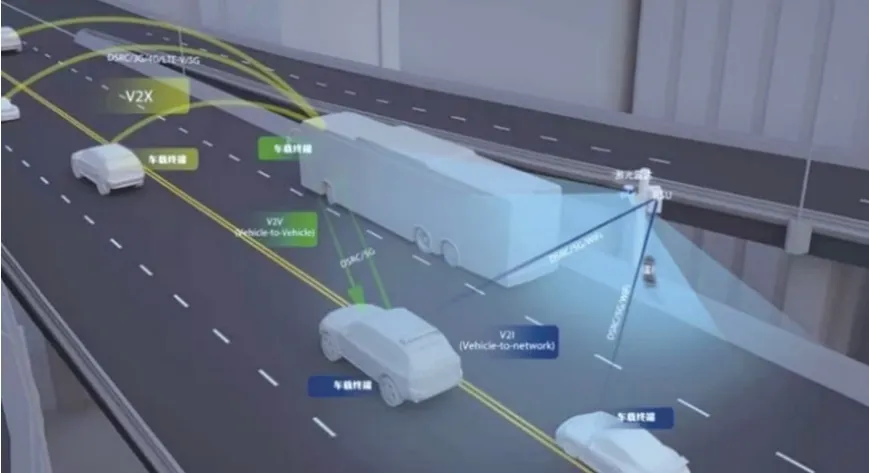
图8 车路协同示意图
车路协同智能感知系统利用路基3D 激光雷达进行道路环境感知、利用MEC 进行数据智能计算,并采用5G-V2X 的信息传输系统。在感知系统中,路基3D 激光雷达是道路环境感知的主体,布设于关键和复杂的路口或路段,对所在区域道路进行精确感知;激光雷达安装在路侧具备独有的优势,由于安装高度高,视距条件更好,不容易被遮挡,拥有“上帝视野”,同时位于交叉路口,可感知多方向道路,视野更加开阔。
计算系统的主要功能是汇集区域内激光雷达点云数据,进行计算处理,构建动态高精度地图并将处理后的信息进行分发、存储和上报,实现动态高精度地图的构建。主要包括四个方面的任务:首先是道路建模,识别激光雷达所在区域的固定结构;其次是目标分割,识别道路环境中非固定物体的存在情况;再者是目标聚类,将感知目标划分为大型车辆、小型车辆、行人、非机动车等类型;最后是目标的持续跟踪,输出目标的实时位置、大小、速度、方向,并推算目标轨迹。
在传输系统中,感知数据通过5G-V2X 传输至边缘节点,并将环境感知数据分析结果通过5GV2X,分发到交通参与者。主要包括两大部分:第一部分是激光雷达原始点云数据在边缘侧的汇集,以及处理后结果的下发;第二部分是服务请求的发起和服务的提供。目前,V2X 路侧终端的通信制式是LTE-V2X+4G,未来将会融合LTE-V2X、5G、5G NR-V2X 等多种通信制式。
4 结束语
三维激光雷达具有检测快速、检测距离远、三维扫描的特点,作为自动驾驶车辆的“眼睛”,已经成为车辆必不可少的传感器。本文对三维激光雷达系统设计过程中的关键技术难点进行分析,并提出了相应的解决方案,其性能指标能够满足需求,并且方案简单,成本较低,功耗较低,体积小,整体设计指标接近于国外的成熟产品。基于边缘计算技术的车路协同智能感知系统解决方案为激光雷达在路侧的应用提供了丰富的实践环境。目前已经在许昌5G 自动驾驶示范区、郑州宇通智慧岛“智慧岛5G 智能公交”等全国多个示范项目中落地应用。通过技术突破,解决发展瓶颈,打破国外垄断,实现了自动驾驶核心零部件的国产化,最终推动自动驾驶技术的普及与发展。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
有色设备(2021年4期)2021-03-16
电子制作(2019年19期)2019-11-23
电子制作(2018年16期)2018-09-26
汽车电器(2017年1期)2017-12-06
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
北京航空航天大学学报(2017年10期)2017-04-20