基于电流检测的飞机地面电源同步整流控制*
2022-10-22 03:36陈鹏宇刘宝泉李启凡吴泉兵
电子器件 2022年4期
陈鹏宇刘宝泉*李启凡吴泉兵
(1.陕西科技大学电气与控制工程学院,陕西 西安 710021;2.西安睿诺航空装备有限公司,陕西 西安 710117)
飞机地面电源为各机型机种的地面维护提供稳定的115 V/400 Hz、28 V DC 或270 V DC 电能。三相整流器作为飞机地面电源的前端,为后级的逆变或斩波电路提供稳定的直流母线[1-3]。常见的飞机地面电源容量一般为100 kVA~200 kVA,传统的二极管整流方案损耗大、效率低,过大的热损耗导致散热问题严峻[4]。根据文献调研,为提升整流电路的工作效率,降低热损耗,研究人员提出了基于功率MOSFET 的同步整流方案替代传统的二极管整流方案[5-7]。功率MOSFET 沟道的内阻小,且具有正温度系数利于自动均流。将多个MOSFET 并联以替代整流二极管,并通过控制技术使各MOSFET 同步于二极管导通,从而使电流优先流通于并联功率MOSFET 的各沟道,降低各功率器件的导通损耗,提升整机效率。
同步整流电流的驱动控制方式可分为自驱动与外部驱动两类。自驱动控制通过线圈绕组来获取某处的电压信号量去直接驱动MOSFET 以实现简单的同步整流驱动控制,如文献[8]通过检测变压器二次侧绕组电压量进行自驱动的方法,文献[9]是利用一次侧绕组电压量自判断来驱动MOSFET 的方式。自驱动方式的实现成本较低且驱动方式简单,但驱动信号的同步精度较低,仅实现简单的互补目的,主要应用于小功率整流电路。外部驱动方式有专用同步整流芯片和数字电路控制两类。常用同步整流驱动芯片有IR11672、LP35112 等,但通常只应用于小功率电源设备中;数字电路控制的驱动方式,是通过检测电路状态进行逻辑判断后完成驱动控制。文献[10]通过检测MOSFET 漏源电压进行同步驱动控制方式;文献[11]通过交错延迟控制的方式实现同步驱动等。外部驱动方式的时序更精准,稳定性更高,但硬件电路与控制策略较为复杂。
在上述文献中,无论自驱动还是外部驱动,同步整流策略均基于电压检测产生驱动信号,如检测MOSFET 的漏源电压产生驱动时序。在飞机地面电源等所使用的大功率整流器中,由于寄生参数的影响,各桥臂MOSFET 的漏源电压会在开关过程中产生较严重的振荡,容易造成状态误判,增大了MOSFET 的误导通风险;此外,大功率同步整流需要将多个MOSFET 并联应用,各MOSFET 参数存在差异,不同桥臂的判断阈值不同且难以进行理论设计。
针对上述问题,本文提出了一种基于电流检测的飞机、地面、电源大功率同步整流控制方案。通过分析整流电路各开关器件的通断状态与输入电流的关系,明确各开关器件的动作规律,检测输入三相电流的大小与方向,设计MOSFET 的驱动时序。进一步考虑工程应用因素,设计电流回差方案,并对采样及控制电路的延时进行修正。该方案可有效实现大功率整流器的同步控制,降低电路损耗,提高工作效率。
1 三相同步整流电路拓扑
传统的整流电路采用快恢复二极管或肖特基二极管实现,二极管导通压降一般为0.6 V~1.2 V,在大电流工作情况下管损耗过大。飞机地面电源等大功率同步整流是将多个功率MOSFET 并联并同步于所反并联的二极管导通,由于并联MOSFET 的等效导通电阻RDS(ON)极低,可有效降低整流器电路损耗。
具体的三相同步整流器主电路如图1 所示。每个桥臂采用n个N 沟道功率MOSFET 并联,且所并联的MOSFET 同步导通和关断。ua、ub、uc为三相输入相电压,ia、ib、ic为输入线电流,ud、id为输出电压与电流。
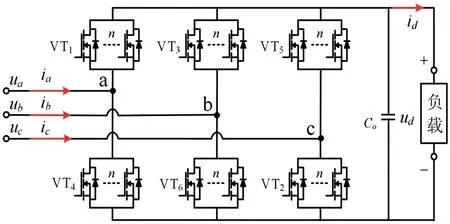
图1 整流器主电路拓扑
当不对电路中的功率MOSFET 进行驱动时,各桥臂并联MOSFET 的反并联体二极管构成整流主回路,工作在传统的二极管整流模式。当电流流过各MOSFET 的体二极管时,控制功率MOSFET 同步导通,电流则从体二极管转移至漏源沟道中,从而降低整流损耗。
2 基于电流检测的同步整流控制方法
2.1 同步驱动方案的确定
根据上述分析,判断体二极管的导通状态是同步驱动控制方案的关键。基于基本二极管整流电路,对各二极管的通断状态与输入电流的关系进行分析,明确整流各二极管的动作规律。基本二极管整流电路共有6 种工作状态,分别如图2(a)~(f)所示。各工作状态下线电流的大小与方向和功率MOSFET 的体二极管导通状态不同。
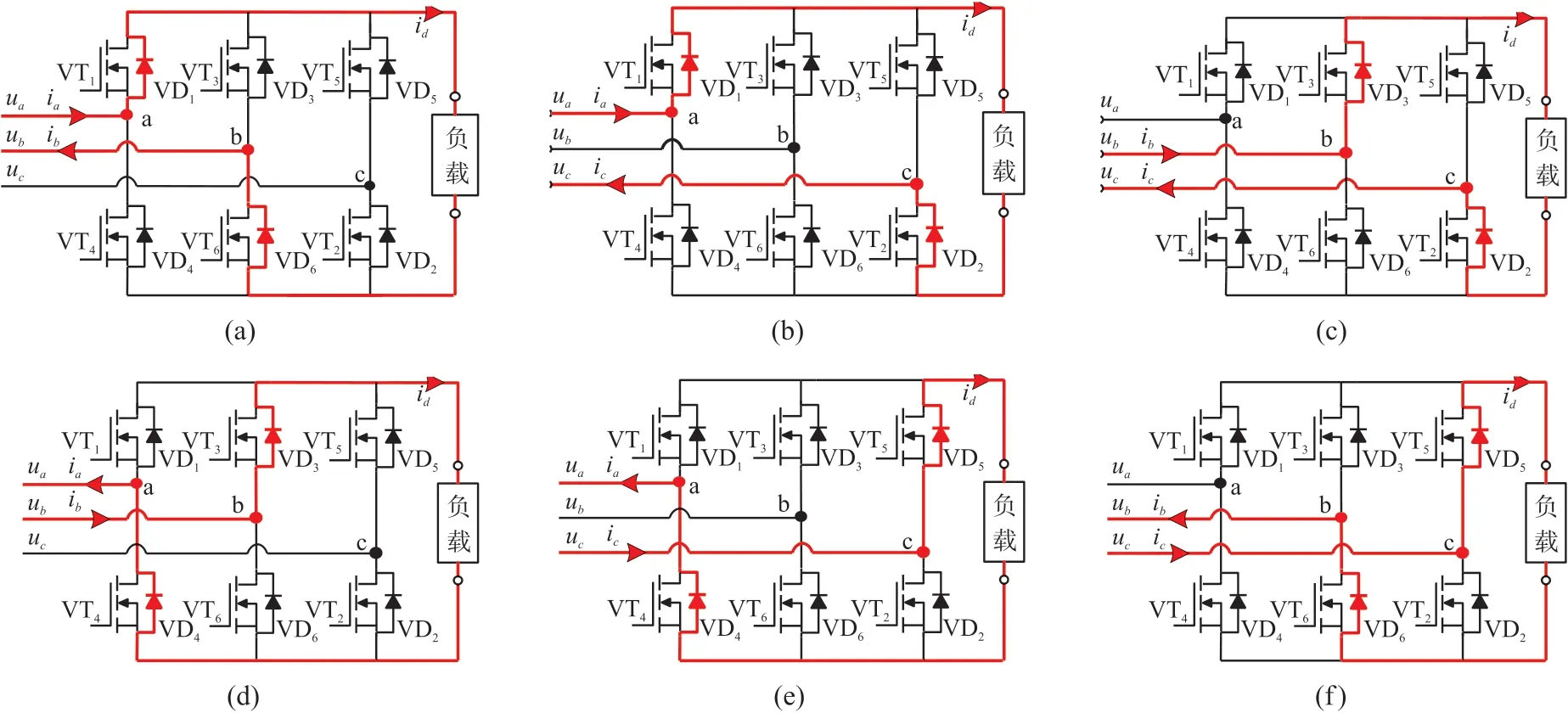
图2 同步整流器未施加驱动信号时各工作状态
状态(a) 二极管VD1和VD6导通,等效回路为ua→VD1→负载→VD6→ub,ia与ib大小相等方向相反,即ia>0、ib<0。
状态(b) 二极管VD1和VD2导通,等效回路为ua→VD1→负载→VD2→uc,ia和ic大小相等方向相反,且ia>0、ic<0。
状态(c) 二极管VD2和VD3导通,等效回路为ub→VD3→负载→VD2→uc,ib和ic大小相等方向相反,且ib>0、ic<0。
状态(d) 二极管VD3和VD4导通,等效回路为ub→VD3→负载→VD4→ua,ia和ib大小相等方向相反,且ib>0、ia<0。
状态(5) 二极管VD4和VD5导通,等效回路为uc→VD5→负载→VD4→ua,ia和ic大小相等方向相反,且ic>0、ia<0。
状态(6) 二极管VD5和VD6导通,等效回路为uc→VD5→负载→VD6→ub,线电流ib和ic大小相等方向相反,且ic>0、ib<0。
对上述6 种不同的工作状态进行分析,各二极管VD1~VD6与输入电流ia、ib、ic的关系可归纳总结为表1。以A 相为例,根据表1 提供的信息,当ia>0 时,上管VD1导通、下管VD4关断;当ia=0 时,VD1、VD4关断;当ia<0 时,下管VD4导通、上管VD1关断。B 相和C 相的各二极管通断状态遵循相同的规律。
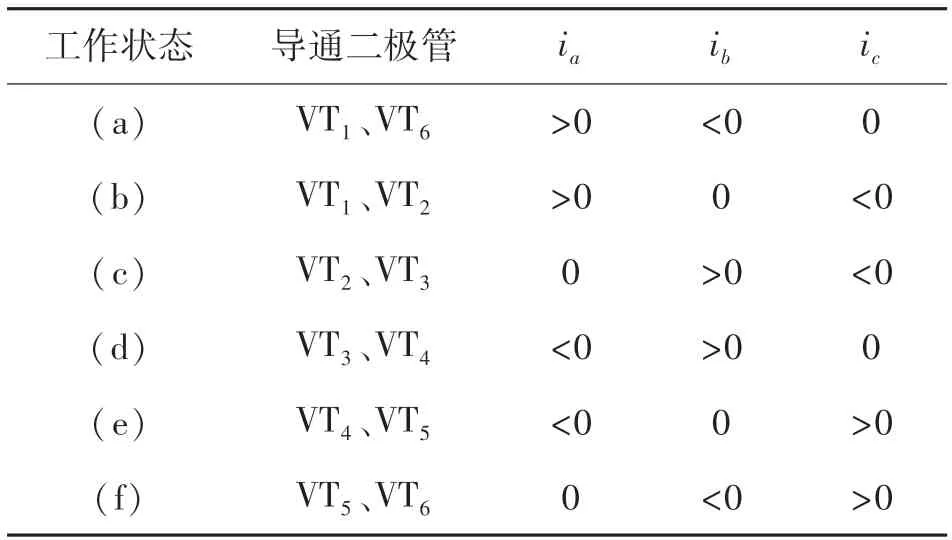
表1 二极管状态与电流方向的关系
根据上述规律,可根据电流ia的方向确定VT1与VT4的门极同步驱动信号:当ia>0 时,控制VT1开通,直至ia降至0 前关断;当ia<0,控制VT4开通直至ia降至0 前关断;当ia=0,保持VT1与VT4处于关断状态。B 相与C 相MOSFET 可采用相同的控制方法,由ib决定VT3与VT6的同步驱动信号,由ic决定VT5与VT2的同步驱动信号。定义各功率MOSFET 的门极驱动信号为G1~G6,开通时为“1”,关断时为“0”,则各功率MOSFET 同步驱动的逻辑关系式为(1)。
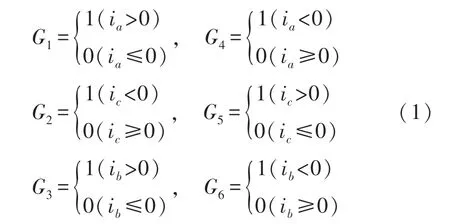
上述同步整流驱动控制方案只需检测输入端的三个电流ia、ib、ic,根据电流方向即可确定各功率MOSFET 的同步信号。本方案可有效降低控制电路的复杂程度,实现对采用多MOSFET 并联设计的大功率同步整流器的驱动控制。
2.2 电流回差方案设计
公式(1)所确定的各MOSFET 的同步驱动控制逻辑是基于电流过零判断产生的,在实际应用中,由于寄生参数及二极管方向恢复的影响,在换流过程中会出电流振荡[12-13],容易导致电流状态误判进而引起MOSFET 频繁通断,影响设备的工作安全,因而需要设计电流回差以消除上不利影响。
以A 相为例,本文所设计的电流回差方案如图3所示。设定了G1和G4的开通阈值Ika、Ikd和关断阈值Ikb、Ikc。当ia>0,电流流过体二极管VD1;当ia增大至开通阈值Ika时,G1变为高电平,VT1导通,此时电流从体二极管VD1迅速转移至VT1漏源沟道。当ia开始减小并低至关断阈值Ikb时,G1变为低电平,VT1关断,此时电流转移至体二极管VD1继续流通直至VD1承受反压完全关断。同理,当ia<0并反向增大至开通阈值Ikd时,G4变为高电平,VT4导通;当ia逐渐回升至关断阈值Ikc时,G4变为低电平,VT4关断。B 相与C 相的电流回差设计及工作原理与A 相相同。
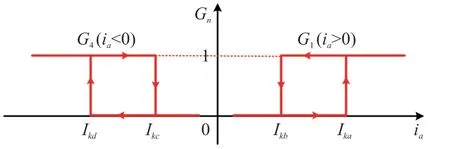
图3 A 相电流回差方案
对于图3 中电流回差各阈值Ika~Ikd的设计满足以下两个原则:
(1)开阈值Ika和Ikd的绝对值大于二极管反向恢复电流的最大值和换流寄生振荡的峰值,确保不会出现误断造成MOSFET 异常通断;
(2)关断阈值Ikb和Ikc的值尽量接近0 以减少二极管续流时间,提升整流效率。
2.3 考虑延迟的回差阈值修正
在实际工程应用中,霍尔传感器、采样调理电路、驱动电路、控制算法等都会带来额外的延时,使得MOSFET 的驱动信号滞后于电流回差阈值。MOSFET 延迟关断可能引起直通,损坏整流电路,因而需要对上述阈值进行修正。
电流回差阈值的修正公式为(2),其中IKA~IKD为修正后的开通与关断阈值;kup为电流上升率,kdown为电流下降率,可根据实际测试数据进行计算求取;tc为霍尔传感器和采样调理电路的物理延迟时间,可根据具体霍尔器件的数据表和采样电路的设计求取;tr为软件算法延迟时间,可根据软件流程、中断时间等数据进行评估或测试;tz为驱动电路的硬件延迟时间,根据驱动电路的设计获取。
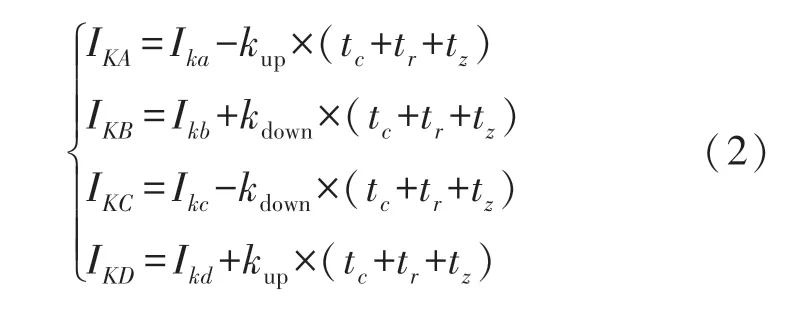
考虑回差和阈值修正,本文得到的同步整流驱动控制的最终方案为式(3)。

3 仿真与实验验证
3.1 仿真验证
基于Simulink 搭建如图4 所示飞机地面电源同步整流仿真模型,同步整流驱动控制算法使用有限状态机(Stateflow)实现。具体仿真参数如下:
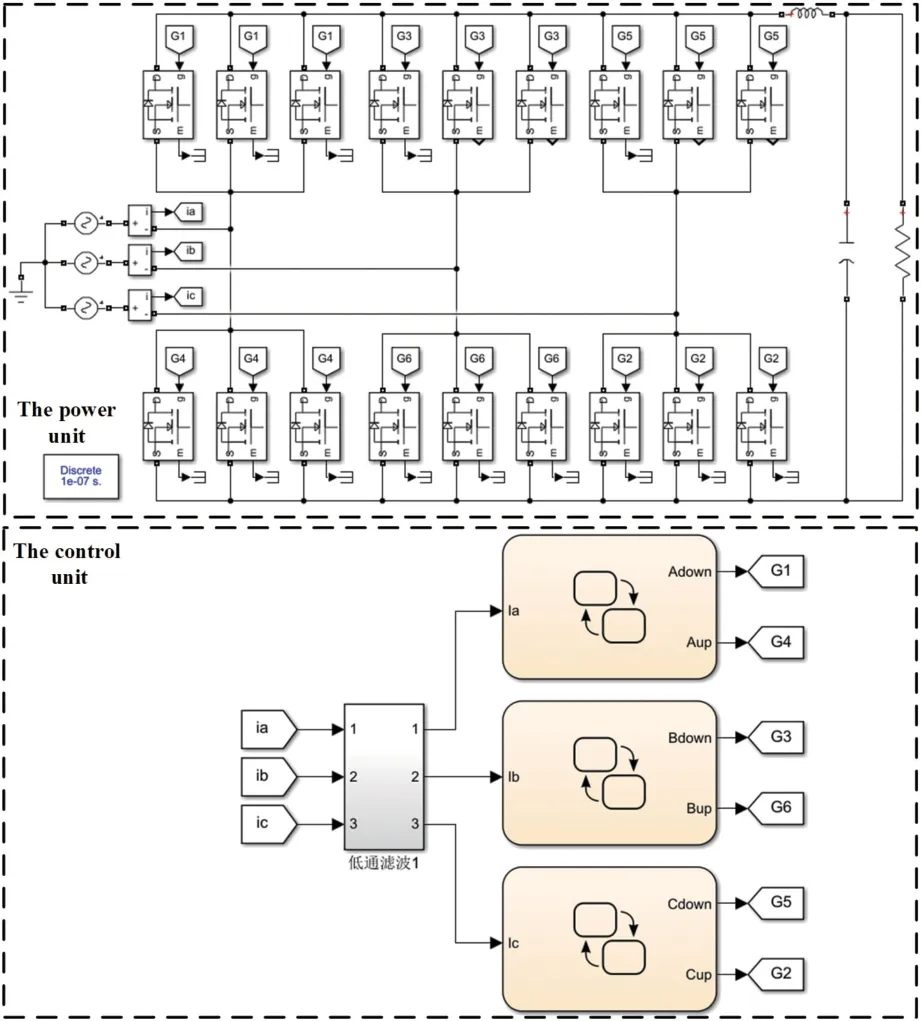
图4 仿真模型图
(1)电源电压115 V/400 Hz,功率MOSFET 的导通电阻RDS(ON)=0.002 Ω,体二极管导通压降1.4 V,每个整流桥臂采用3 并联方式。
(2)负载阻值0.9 Ω,线路阻值0.01 Ω,电感量6×10-6H。
(3)电流回差的开通与关断设定阈值IKA~IKD分别为+6 A、+2 A、-2 A、-6 A。
图5(a)为电流ia波形,图5(b)为VT1的驱动信号G1,图5(c)和(d)为VT1的漏源电压UVT1(DS)及其局部放大图。由仿真结果图5(a)和图5(b)可知,当ia达到设定的开通与关断阈值时,G1的驱动逻辑信号进行相应的变化。由图5(c)VT1漏源电压和局部放大图5(d)可知,当开通驱动信号到达时,VT1、VT4即刻导通,UVT1由体二极管的导通压降1.4 V 迅速降低至MOSFET 沟道电压0.5 V,从而有效降低整流通态损耗。
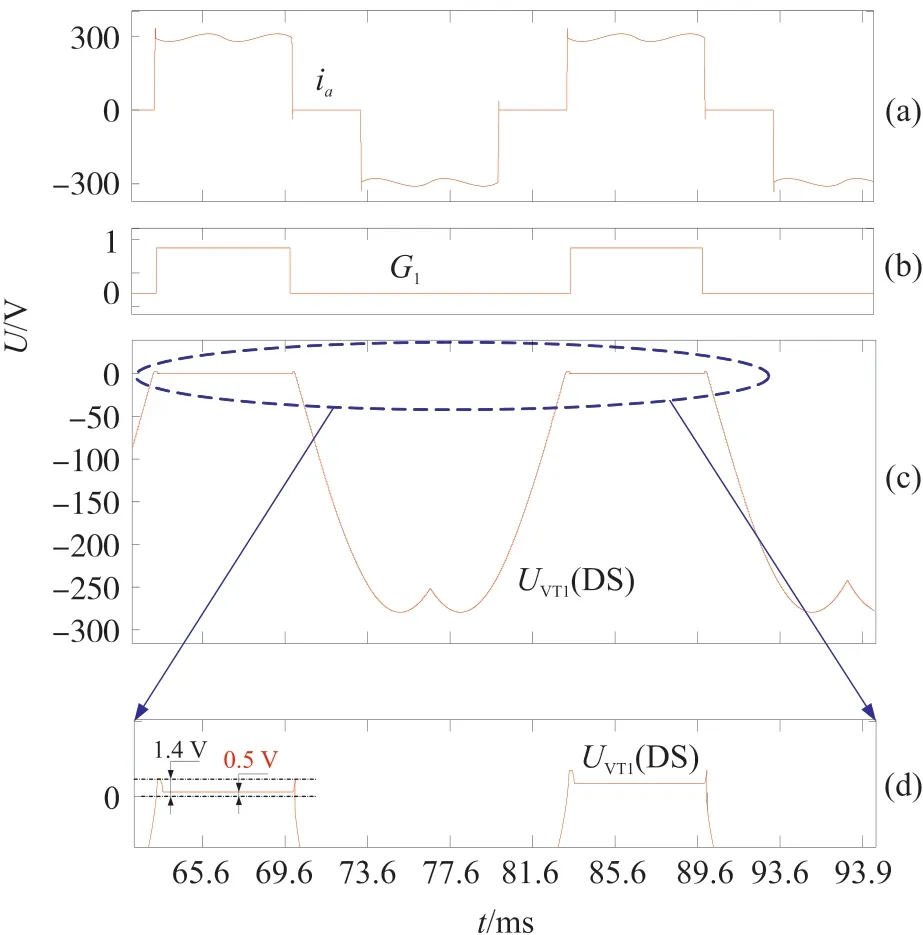
图5 VT1 同步通断的仿真结果
3.2 工程样机与实验验证
本文的实验样机如图6 所示,包括主电路、驱动电路、控制电路、采样器件及负载,主要器件选型如表2。输入三相交流电压有效值100 V/50 Hz,负载电阻为5 Ω。
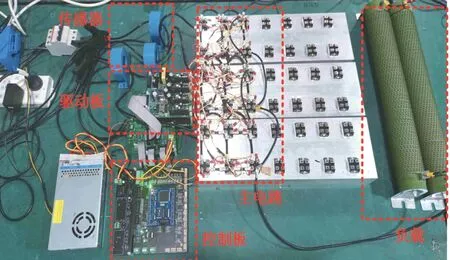
图6 工程实验样机
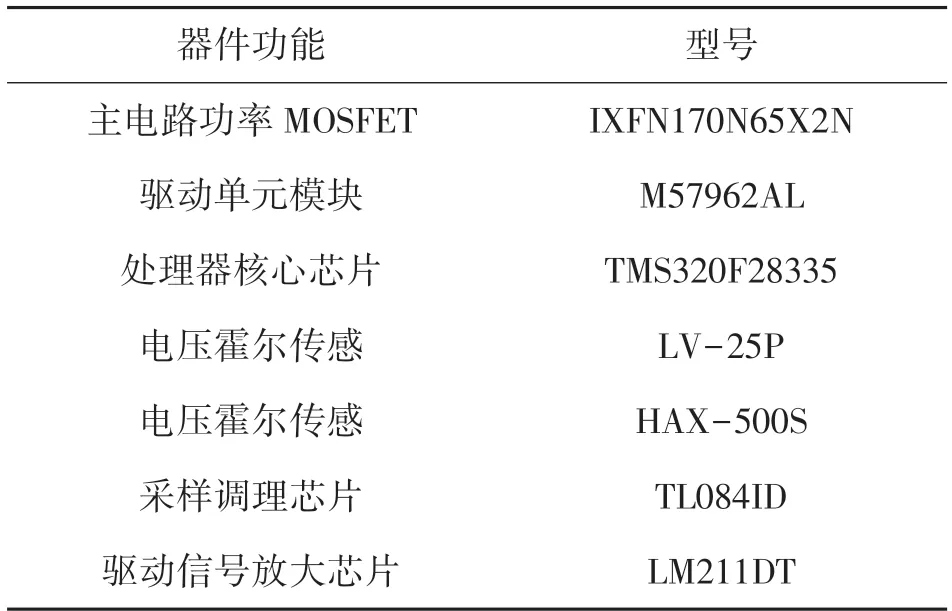
表2 实验样机的主要器件选型
电流回差的初始开通阈值Ika和Ikd设定为7 A和-7 A,初始关断阈值Ikb和Ikc设定为2 A 和-2 A。之后根据公式(2)对阈值进行修正。经测试得到霍尔传感与采样调理电路的实际延时tc为37 μs,软件算法部分延时tr为40 μs,驱动电路的硬件延时tz约为5 μs。通过二极管整流电路的波形和数据,求得电流变化率kup和kdown为0.03 A/μs。利用上述数据,可计算出修正后应设置的开通与关断的阈值为IKA~IKD分别为:+4.7 A、+4.4 A、-4.7 A、-4.4 A。
首先进行二极管整流实验,此时输入线电流ia、ib、ic的波形如图7 所示。电流通过功率MOSFET的体二极管流通,此时整流管的损耗较大。
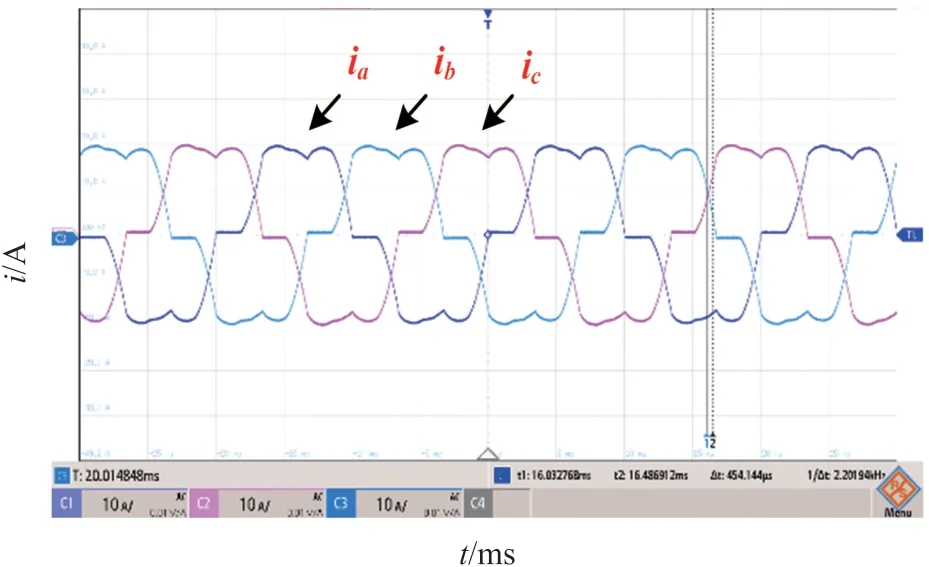
图7 输入线电流波形
加入本文所提出的同步整流控制算法后,得到的结果如图8 所示。其中,图8(a)为线电流ia与VT1和VT4的驱动波形,图8(b)为局部放大的细节图。基于M57962AL 的驱动电平为+15 V 与-10 V,实际的开通与关断电流阈值分别为+7.6 A、+1.8 A、-7.2 A、-2.0 A,与本文设计值基本保持一致。各功率MOSFET 的通断时序与设计保持一致,并同步于体二极管通断。
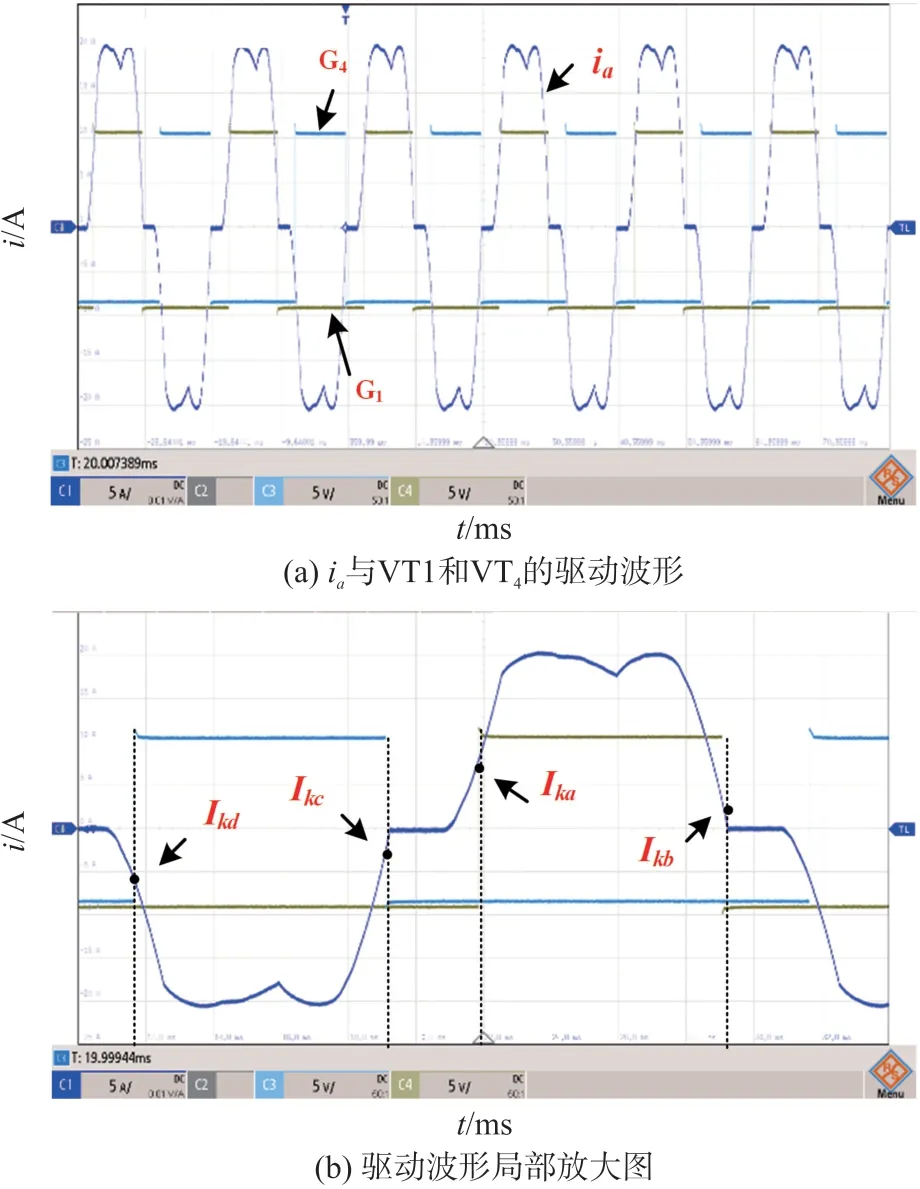
图8 A 相VT1 和VT4 同步整流驱动及其放大图
图9(a)为A 相VT4漏源电压UVT4和驱动信号G4及ia的实验波形,图9(b)为局部放大的波形图,共分为5 个阶段:
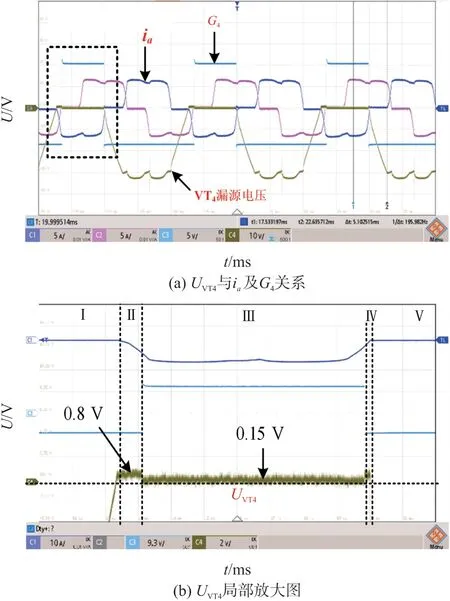
图9 A 相VT4 和VD4 换流过程及放大图
阶段Ⅰ VD4承受反向电压未导通;
阶段Ⅱ VD4承受正向电压导通,此时UVT4为体二极管VD4的导通电压,约为0.8 V;
阶段Ⅲia增大至开通阈值-7.2 A,VT4导通,UVT4降至约0.15 V,电流转移至MOSFET 漏源沟道流通;
阶段Ⅳia减小到关断阈值-2.0 A,VT4关断,电流再次转移至体二极管VD4流通,UVT4再次升高至约0.8 V;
阶段Ⅴia降至0 后,VD4承受反向电压逐步完全关断。
图9 实验波形说明,功率MOSFET 在依照设定的同步整流驱动信号进行工作。当MOSFET 开通时,其漏源两端电压降至约0.15 V,相比较二极管导通时的压差0.8 V 大幅降低,实现了同步整流功能。
4 结论
针对飞机地面电源用大功率整流器损耗大、效率低的问题,提出了基于电流检测的同步整流控制方案。通过分析输入线电流与各开关器件的工作状态,确定各MOSFET 的同步整流控制规律,进一步设计电流回差并进行阈值修正以产生MOSFET 驱动信号。通过小功率样机实验,在输入电压100 V/50 Hz 输出负载5 Ω 时,各MOSFET 可同步于体二极管通断。二极管导通时,通态压降约为0.8 V,MOSFET 导通时,通态压降减小为0.15 V,大幅降低了整流电路的通态损耗,充分证明了基于电流检测的同步整流控制方案的有效性,有效提升了大功率整流器的工作效率。
猜你喜欢
电气技术(2022年6期)2022-06-27
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
科学家(2021年24期)2021-04-25
速读·下旬(2019年3期)2019-04-11
电子制作(2017年9期)2017-04-17
电子制作(2017年19期)2017-02-02
电子制作(2016年19期)2016-08-24
中学物理·高中(2016年1期)2016-05-26
中学科技(2015年10期)2016-01-06