铁路货车心盘螺栓自动分解系统研究
2022-10-31 10:02张彪中国铁路上海局集团有限公司南京东车辆段
上海铁道增刊 2022年2期
张彪 中国铁路上海局集团有限公司南京东车辆段
1 系统研发背景
铁路货车下心盘是铁路货车承载的重要组成部分。在高速重载运输环境下,铁路货车运行品质对下心盘的质量要求越来越高。
目前路内大多数货车车辆段主要以人工为主进行心盘螺栓的分解作业,存在作业人员工作强度较大,作业环境恶劣以及工作效率低下等问题。为提高心盘螺栓分解的质量和效率,解放劳动生产力,避免人身安全隐患,提出研发全自动一体化螺栓拆解系统,通过视觉自动定位补偿系统的辅助来实现铁路货车下心盘螺栓全自动分解。
2 系统方案设计
2.1 系统总体设计思路
系统总体设计如图1所示。当转向架进入工作区域,自动触发轮对定位装置8就位。视觉模块4对心盘进行视觉扫描,获得转向架型号信息和螺栓位置位移补偿值,系统将视觉信息反馈给六轴机器人2,六轴机器人2根据转向架型号自动通过机器人工具快换系统5更换对应的一体式螺栓分解系统6,将一体式夹具送至螺栓处,电扳手开始工作,分四次对八螺栓进行分解,待所有工作完成后,六轴机器人2复位,轮对定位装置8自动解除放行。
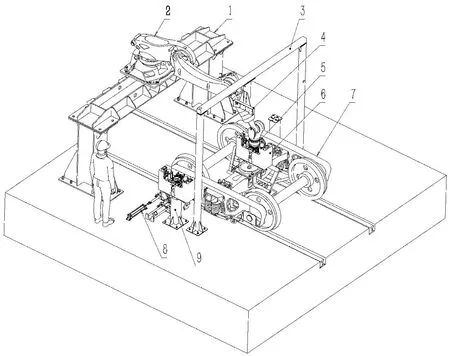
图1 系统平布置图
2.2 系统主要技术指标
(1)工业机器人轴数:6轴;
(2)机器人负载:200 kg;
(3)工业机器人达到距离:2 900 mm;
(4)视觉重复定位精度:0.1 mm;
(5)两颗螺栓分解时间:30 s;
(6)机器人重复定位精度:0.05 mm~0.06 mm;
(7)扭矩最大值:1 980 Nm;
(8)系统工作效率:每心盘平均耗时不大于3分钟。
2.3 系统主要构成单元
铁路货车心盘螺栓自动分解系统由六轴机器人系统、机器人工具快换系统、一体式螺栓分解系统、视觉自动定位补偿系统以及车轮定位装置等五大单元组成。
2.3.1 六轴机器人系统
六轴下探式工业机器人采用龙门架固定,具有占地面积少、操作简便、自由度高等优点,适用于几乎任何轨迹或角度的工作。通过自由编程实现不同工件之间的灵活快捷更换,可代替很多不适合人力完成,有害身体健康的复杂工作。
六轴机器人系统通过Device Net网络标准I/O板连接PLC I/O模块,由PLC控制机器人启动;机器人通过TCP/IP协议与主控系统通信,由主控系统控制机器人进行选配分解动作。六轴机器人如图2所示

图2 六轴机器人
2.3.2 机器人工具快换装置
(1)机器人快换装置的具体组成
机器人工具快换装置有2个工具末端执行器,根据不同型号的转向架进行自动切换。工具快换装置包括一个机器人侧用来安装在机器人手臂上(如图3),还包括一个工具侧用来安装在末端执行器上,(如图4)。工具快换装置能够让不同的介质从机器人手臂联通到末端执行器(如图5)。
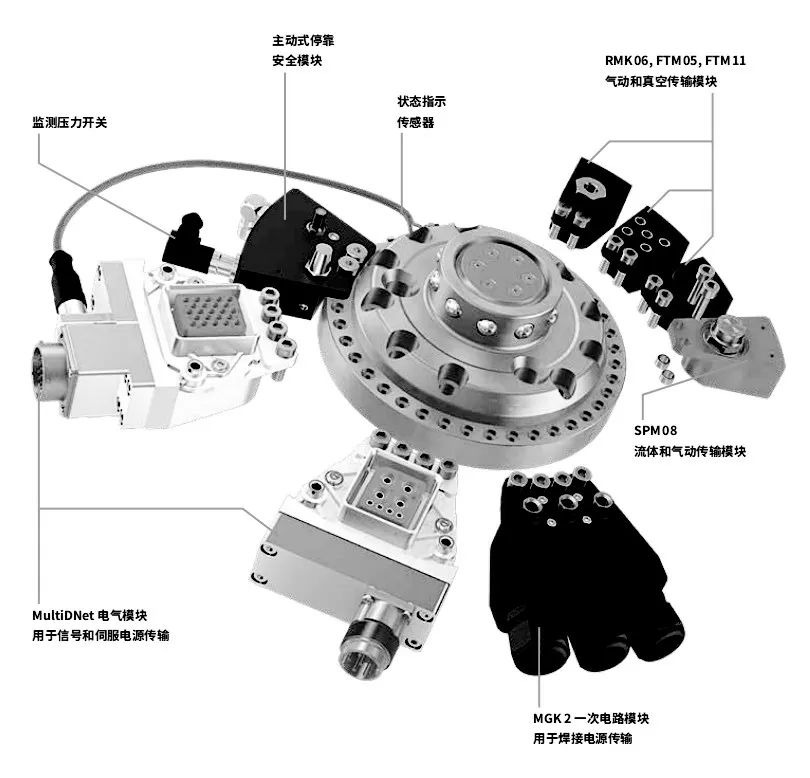
图3 机器人端基础单元
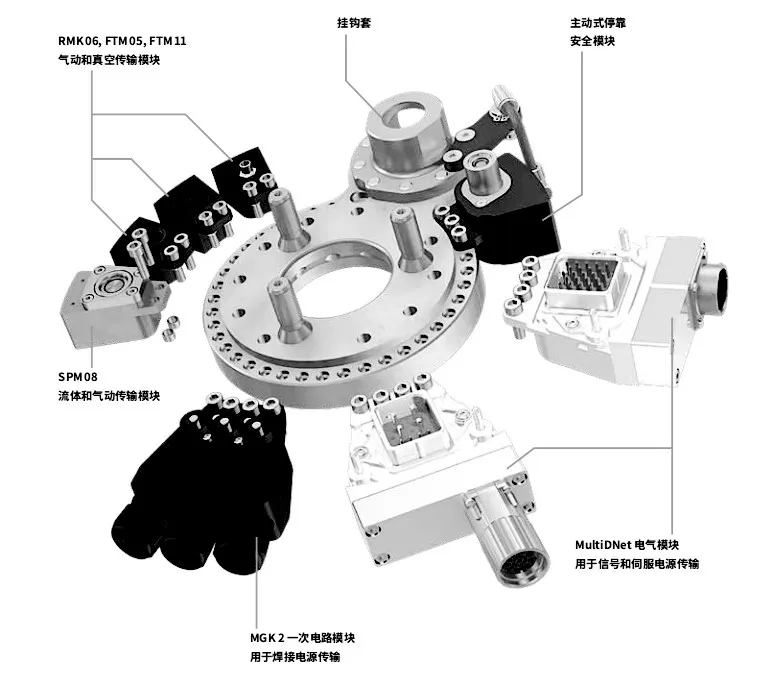
图4 工具端基础单元
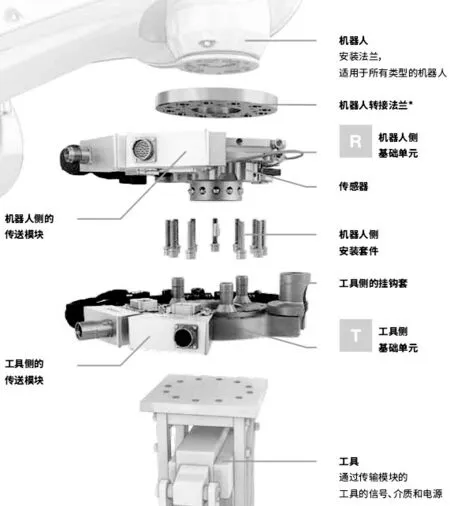
图5 机器人工具快换装置组成
(2)机器人快换装置的具体优点
一是生产线更换可在数秒内完成;二是维护和修理工具可以快速更换,降低停工时间;三是通过应用中使用1个以上的末端执行器,从而使柔性增加;四是使用自动交换单一功能的末端执行器,代替原有笨重复杂的多功能工装执行器,实现工具的随意切换,提高工作效率。
(3)机器人快换装置的具体参数
机器人工具快换装置具备超强的载重能力,载重可到达300 kg,允许扭矩力达到2 300 nm,可避免因为电扳手扭矩力较大对机器人手臂造成损伤的情况。详细参数如图6所示。
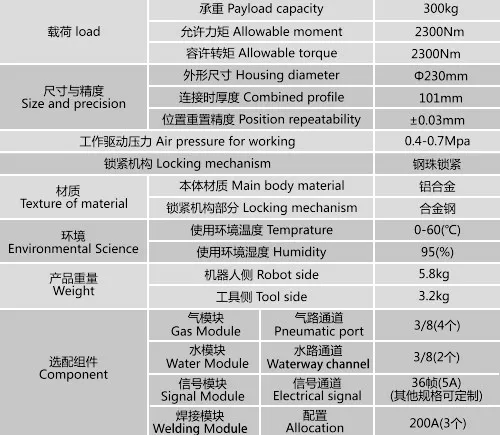
图6 系统相关参数
2.3.3 一体式螺栓分解系统
一体式螺栓分解系统(如图7)是用于对转向架下心盘螺栓分解的自动化装置,由自动扭力扳手和螺母限位装置组成。自动扭力扳手的最大扭矩力为1 250 N.m,可轻易将螺栓进行分解。螺母限位装置不仅有卡紧螺母的功能,还具有完成分解工作后脱落螺母的功能。因不同型号转向架所对应的下心盘螺栓型号不同,所以分别设计了M22和和M24两套一体式螺栓分解系统。
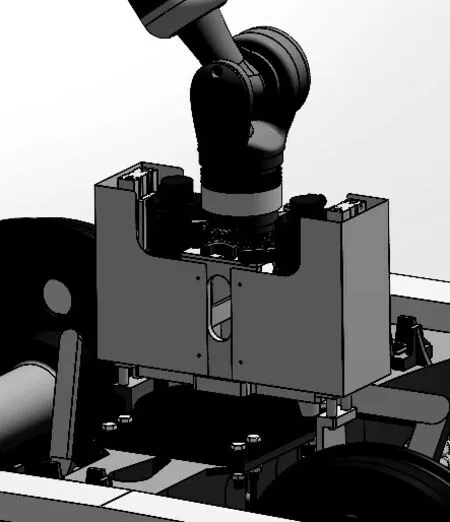
图7 一体式螺栓分解系统
2.3.4 视觉自动定位补偿系统
该系统视觉部分采用静态三维成像技术、移动光栅技术、深度数据融合技术以及嵌入式3D解算等技术,可实现视觉范围内静止物体的快速三维重建。基于标定算法可拟合出视场空间任意点在相机中成像位置与该点垂直相机的距离函数关系式,深度测量精度可达±0.1 mm,扫描速度可达8帧/秒。同时,系统具备自动识别功能,通过深度学习自动建模及比对,实现被测物体尺寸与标准差异部位的自动判别,可根据所测螺栓数据自动判别转向架型号,将螺栓的相对坐标值反馈给机器人的主控算法,以此来实现机器人的精准定位,最终实现全自动化控制。
2.3.5 车轮定位装置
车轮定位装置(如图8)由电感式接近开关、轮对阻挡装置、轮对抱紧装置组成。当轮对阻挡装置将车轮挡住时轮对抱紧装置启动。
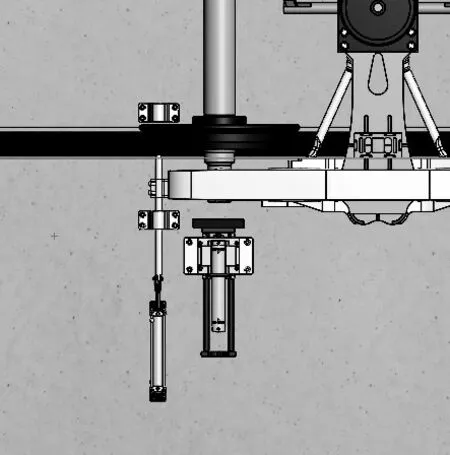
图8 车轮定位装置
3 系统关键技术创新
3.1 一体式螺栓分解装置
(1)工作中扭力矩可达到1 000 N.m以上,分解过程中噪声小,无振动。
(2)适用于不同厚度的下心盘垫板,能将螺栓头及螺母进行准确定位。
(3)使用先进的机器人工具快换系统,能与机器人快速连接,提升柔性化程度。
3.2 光栅投影三维测量技术
本系统采用定制高速面阵相机与面结构化光源,结构化光源由计算机编程产生正弦条纹,将该正弦条纹投影至被测物,利用CCD相机拍摄条纹受物体调制的弯曲程度,解调该弯曲条纹得到相位,再将相位转化为全场的高度,最终在计算机内分析计算后可得出被测物的三维面形数据。该技术具有测量精度高、速度快以及测量数据稳定等优势。原理图如图9所示。
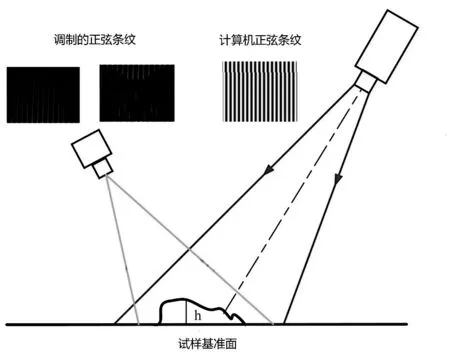
图9 光栅投影三维成像原理图
4 系统拓展功能探讨
4.1 系统增加组装功能
在将扭力扳手更换为扭力可控的自动扳手后,运用本文所述技术即可研发心盘螺栓的分解和组装一体化装置。
4.2 系统增加下心盘搬运功能
通过增加一组搬运工具停靠站,在搬运装置上安装工具末端执行器,可实现机器人快速转换搬运末端执行器,从而实现智能搬运功能。
5 结束语
相对于传统的下心盘螺栓分解作业模式,采用铁路货车心盘螺栓自动分解系统有显著优势,作为集定位系统、自动分解等功能为一体的高端自动化智能装备,能有效提高螺栓分解的准确度和稳定性,降低工人的劳动强度,对保证铁路运输安全、完善铁路智能化建设起到积极的推动作用。
猜你喜欢
中国特种设备安全(2022年5期)2022-08-26
哈尔滨铁道科技(2020年4期)2020-07-22
四川建筑(2020年1期)2020-07-21
制造技术与机床(2019年12期)2020-01-06
测控技术(2018年12期)2018-11-25
减速顶与调速技术(2018年1期)2018-11-13
西南交通大学学报(2018年5期)2018-11-08
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16