面向航天地面测试环境监测的多源阵列传感器网络
2022-11-01 11:44张浩凌郑永秋
兵器装备工程学报 2022年10期
崔 娟,赵 阳,李 刚,张浩凌,郑永秋
(1.中北大学 仪器科学与动态测试教育部重点实验室, 太原 030051; 2.北京空间飞行器总体设计部, 北京 100094)
1 引言
地面测试作为航天器制备过程的重要环节,旨在对航天器的潜在故障进行预分析。航天器地面测试环境庞大且复杂,其外围测试所需的发热、大功率设备会对局部环境造成温度变化,因此需要在测试环境周边如厂房等有针对性地分布传感节点,进行远程测量。目前针对航天器地面测试环境的监测系统尚未有完善的解决方案。张福生等提出了一种远程环境参数监测系统,该系统体积小、可实现8路温湿度、烟雾浓度测量,实现了对测试环境的远程监控。然而,这套环境参数监测系统的监测参量过少,无法覆盖航天器地面测试不同测试阶段对环境重要参量的侧重性监测。事实上,航天器地面测试存在多个测试平台,各个平台对测试环境的需求不同。不仅需要对分立的多项参数进行系统测试,还要考虑远距离传输时的电源隔离、电磁干扰等问题。
针对航天器地面测试环境监测系统的技术空白,本文中提出一种多参量、高同步的面向航天器地面测试环境参量监测的多源阵列传感器网络,建立了基于CAN总线的多参量航天器地面测试系统。系统包含温度、应力、湿度、振动、电流多传感参量,并针对不同测试场景设计了不同的系统工作模式。通过CAN总线驱动采集数据的高速回传,实现了对航天器地面测试环境的全方位数据参量采集。在数据显示与分析部分,系统针对不同传感器网络设计了人机交互界面,采用随机森林(random forest,RF)集成算法,通过并行化训练,建立多参量数据的大数据分析模型,最终实现对航天器潜在异常情况的预测与警报。
2 测试系统设计
本文中提出的地面测试环境参量监测系统组成如图1所示,包括人机交互界面、温度采集模块、应变采集模块、湿度、振动采集模块、电流采集模块以及频谱监测模块。其中光纤式温度、应变测量模块安装在PCI卡1上,实时采集到的数据通过USB接口传输给上位机;数字传感器湿度、振动以及霍尔电流传感器采集模块安装于PCI卡2上,此模块包含多个传感器节点,所有节点通过CAN总线将采集到的数据回传;频谱监测传感装置通过USB3.0接口完成与工控机的数据收发。由于航天器的地面测试平台要求环境监测系统在电源和信号传输上均与航天器系统隔离,避免不必要的干扰,因此整个系统采用AC220V@50 Hz供电,经电路的电压转换模块处理后满足各个测试模块的供电需求。
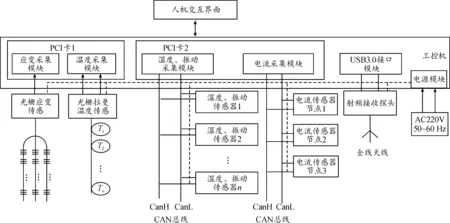
图1 多源阵列传感器网络监测系统组成框图Fig.1 Multi-source array sensor network test system
因此,针对不同的工作平台,本系统的不同工作模式对监测参量的侧重点各有不同,根据测试平台和测试阶段的不同将测试系统分为3个工作模式:
1) 测试大厅工作模式:此模式下测试周期长,测试参量细致,设备多数处于分立状态,因此需要全面地监测温湿度、电缆应变、电流和频谱泄漏等参量,由于此模式下的测试工作不涉及设备的移动,因此不需要监测振动参量。
2) 发射基地工作模式:电磁干扰对发射基地的测试过程影响十分严重,故此模式下重点监测空间电磁干扰和供电电流,辅助监测温湿度参量,电缆应变、振动等参量对测试环境影响不大,故可以不做监测。
3) 转运过程工作模式:此模式下的航天器处于未通电状态,考虑到运输过程可能对设备的连接状况带来影响,因此只对振动参量进行监测。
3 传感模块及硬件电路设计
测试系统对温度和应力采用分布式光纤传感器,对湿度与振动的数据采集使用数字化IC传感器,对线缆中供电电流的监测选用霍尔电流传感器,以确保采集数据的精确性;采用便携式频谱接收探头对测试环境的频谱泄漏进行监测。
3.1 温度、应变传感模块设计
温度、应力的传感模块选择基于扫描半导体激光器的单路光纤光栅解调系统,原理如图2所示。主要包括光源部分、传输光路部分、信号转换与采集部分和上位机控制部分。系统运行初始由上位机对激光器的工作模式和参数进行控制,系统光源首先输出某一波长的光,先经隔离器后进入1*2耦合器的一端。耦合器剩余两路中的其中一路用来将光传输至后边一路的FBG阵列,光源经FBG传感器反射得到的光谱则通过另一路耦合器进入光电探测器实现光电转换,然后通过A/D转换之后,由同步数据采集卡对传感光栅信号进行采集,同时对激光器的触发信号也进行同步采集,然后通过USB将数据传输至上位机,进行进一步的软件解调、显示等操作。
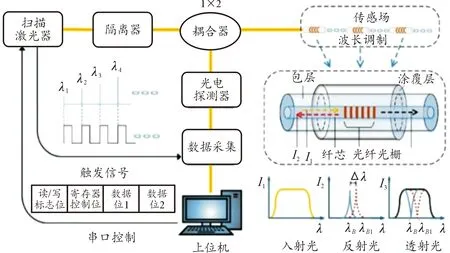
图2 解调系统原理示意图Fig.2 Demodulation system schematic diagram
本系统中共设计有4个通道,其中通道一和通道二为温度传感系统,通道三和通道四为应力传感系统,每个通道有10个传感节点,编号为FBG1~FBG10。
3.2 湿度、振动与电流传感模块设计
湿度监测使用SHT30温湿度传感器中的湿度测量模块。该传感器是一个集成度极高的传感器芯片,自带稳压电路,引脚电平兼容3.3 V与5 V的嵌入式系统,支持串口与ⅡC两种数字接口,数据输出速率在0.1~100 Hz内可编程选择,不仅使用便捷,而且达到了较高的测量精度,湿度测量精度可达到±2%RH。
振动监测使用JY61P姿态传感器实现。此模块集成了高精度的陀螺仪、加速度计、高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,可快速求解出模块当前的实时运动姿态。该传感器模块支持串口与ⅡC两种数字接口,数据输出速率在0.1~200 Hz内可编程选择。测量精度在静态下为0.05°,动态下为0.1°,稳定性极高。
电流传感器选用霍尔开合电流传感器HSTS016L,传感器的测试量程达到了±20 A,精度与线性度都达到了1%,且在5 V电源供电下,最大电流消耗仅为12 mA,可在5 μs内对电流变化做出响应,综合各方面性能,此款电流传感器与本系统的匹配度较高。
本测试模块设计为独立的传感器节点实现航天设备转运过程中大面积的数据监测。每个传感器节点配有湿度与振动传感器芯片,通过CAN总线实现数据的传输与存储。主控芯片选用STM32F103,考虑到环境湿度变化较小,故设置对湿度的数据采集速率为1 Hz;而振动数据是转运过程工作模式的重点监测对象,因此其采样速率为100 Hz。
SHT30温湿度传感器与控制芯片的数据传输通过串口1实现,振动传感器通过串口2将采集到的环境振动数据发送给控制芯片;电流传感器输出模拟信号,需经过A/D转换后,将转换后的数字信号输入控制芯片串口引脚。所有采集的数据经STM32F103打包后发送到CAN总线,最终将数据回传到上位机进行显示、分析与保存。其数据流向如图3所示。

图3 湿度振动传感节点原理框图Fig.3 Schematic diagram of humidity and vibration sensor node
控制程序通过定时器设置标志来控制单片机启动A/D转化及向温湿度传感器、姿态传感器发出指令,定时器周期为100 ms,每中断一次就启动一次A/D转化;当中断累积到10次时,控制芯片向2个传感器发出指令,并将添加了标志位的数据包发送到CAN总线上,同时清零计数。控制程序流程如图4所示。
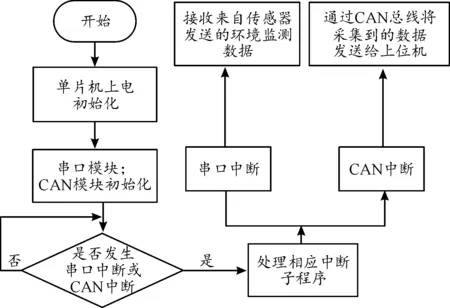
图4 控制程序流程框图Fig.4 Flow chart of control program
3.3 频谱监测
频谱泄漏监测选用超紧凑型接收机探头SAM60,射频前端包含完整的前置放大器、衰减器、5端预选滤波器、后置放大器,实现了对9 kHz~6.3 GHz频段的频谱监测,并针对现场及嵌入式应用的需求,对体积、重量、功耗进行了优化。当监测环境发射一个介于9 kHz~6.3 GHz间的微波信号时,此设备可以准确捕捉,达到精确的频谱泄漏监测。
3.4 传感器节点封装设计
为了实现湿度传感模块与振动传感模块的集成,设计了一种长方体的封装结构,在侧面开窗,方便温湿度传感器对传感器节点外部环境的数据采集,如图5所示。将内部核心电路设计为上下两板,上板主要包括控制模块,下板为传感器模块。将内部电路的电源、地线、CanH与CanL引出到一个坐针连接器,便于进行CAN总线数据传输时的线缆连接与传感器节点的分布式放置。电流传感节点需要引出电流环钳住被测线缆。
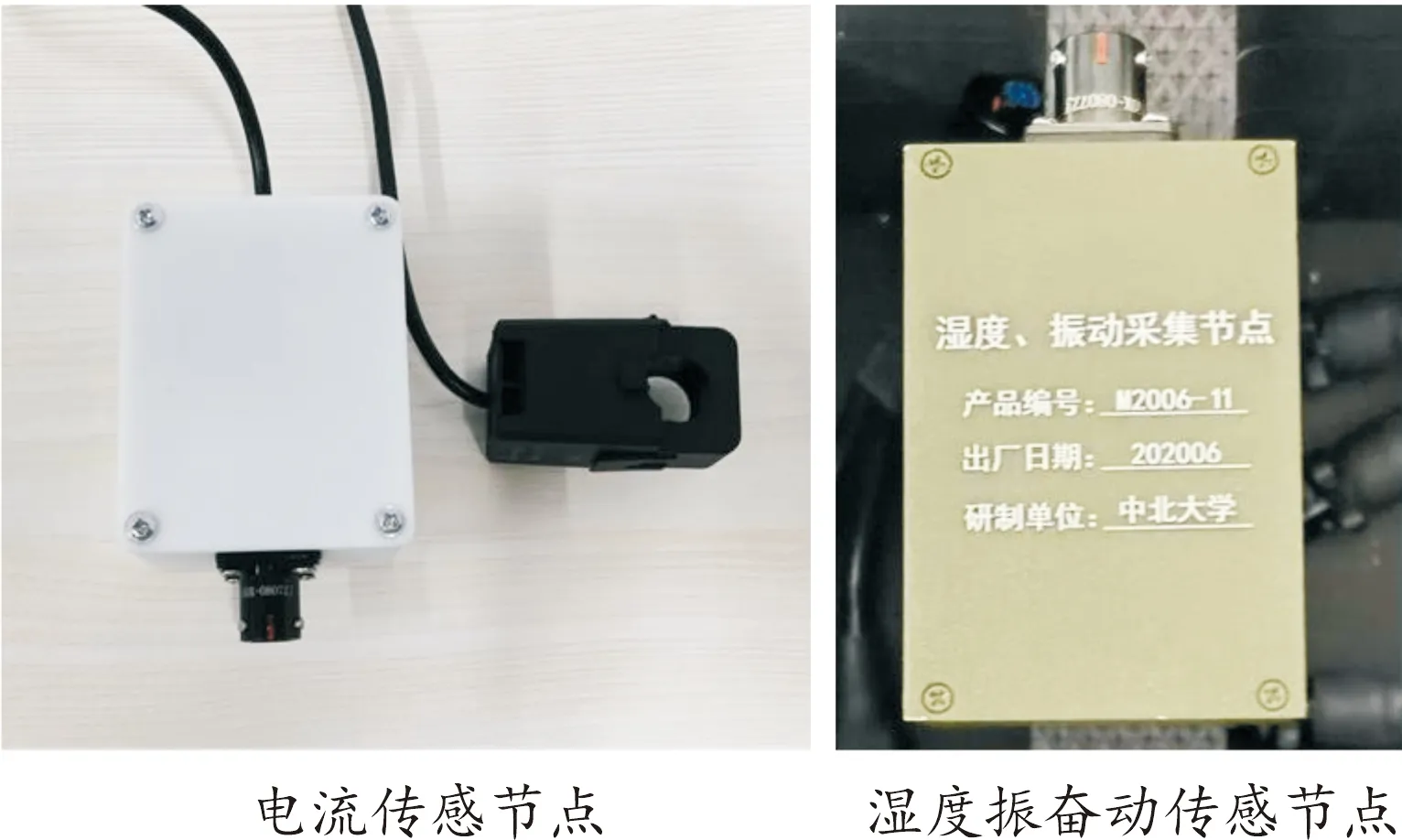
图5 硬件电路实物图Fig.5 Physical drawing of hardware circuit
每个节点之间通过特制电缆连接,传感器节点首先连接“人”字型线缆一,“人”字型线缆的坐针(ZJ)连接器与线缆二的头孔(TK)匹配连接,下一个传感器节点的连接方式相同,如此连接20个节点形成了一个阵列分布式传感器网络,可实现对航天器地面测试环境的大面积分布式监测。线缆制作过程如图6。

图6 线缆制作过程示意图Fig.6 Schematic diagram of cables
4 上位机界面设计
本测试系统的上位机界面由Labview与C#混合编程实现,针对地面测试的不同阶段场景,选择不同的传感器网络对应的上位机界面,能够在不同的工作模式下直观地查看监测数据。上位机主要由数据库、后台组件、数据处理引擎、用户界面4个模块组成,其中数据库主要用于存储与管理数据,包括温度、应力、湿度、振动、电流和频谱等传感信息;后台组件通过内置的API实现显示功能;数据处理引擎搭建起传输网络与数据库之间的数据交换与处理的桥梁,实现数据的存储、读取与显示。对3种传感器网络的独有软件界面,设计有DLL,方便直接调用不同的上位机界面,完成各个测试传感量的数据融合与管理。上位机功能如图7所示。
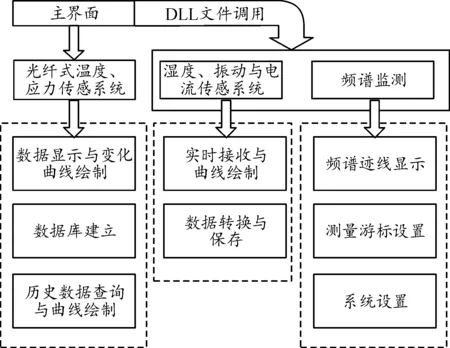
图7 上位机功能框图Fig.7 System function diagram
4.1 温度、应力数据监测上位机
温度、应力传感数据通过RS485串口协议完成数据的回传。作为不同传感模块的上位机主界面系统,此界面能直观显示当前测试大厅的温度与应力变化,精确显示单条光纤对温度和应力的监测数据并可实现不同光纤信道的无缝切换。根据不同的地面测试环境,选取不同的工作模式侧重数据监测,调取湿度、振动以及频谱检测的上位机界面。其上位机界面如图8所示。
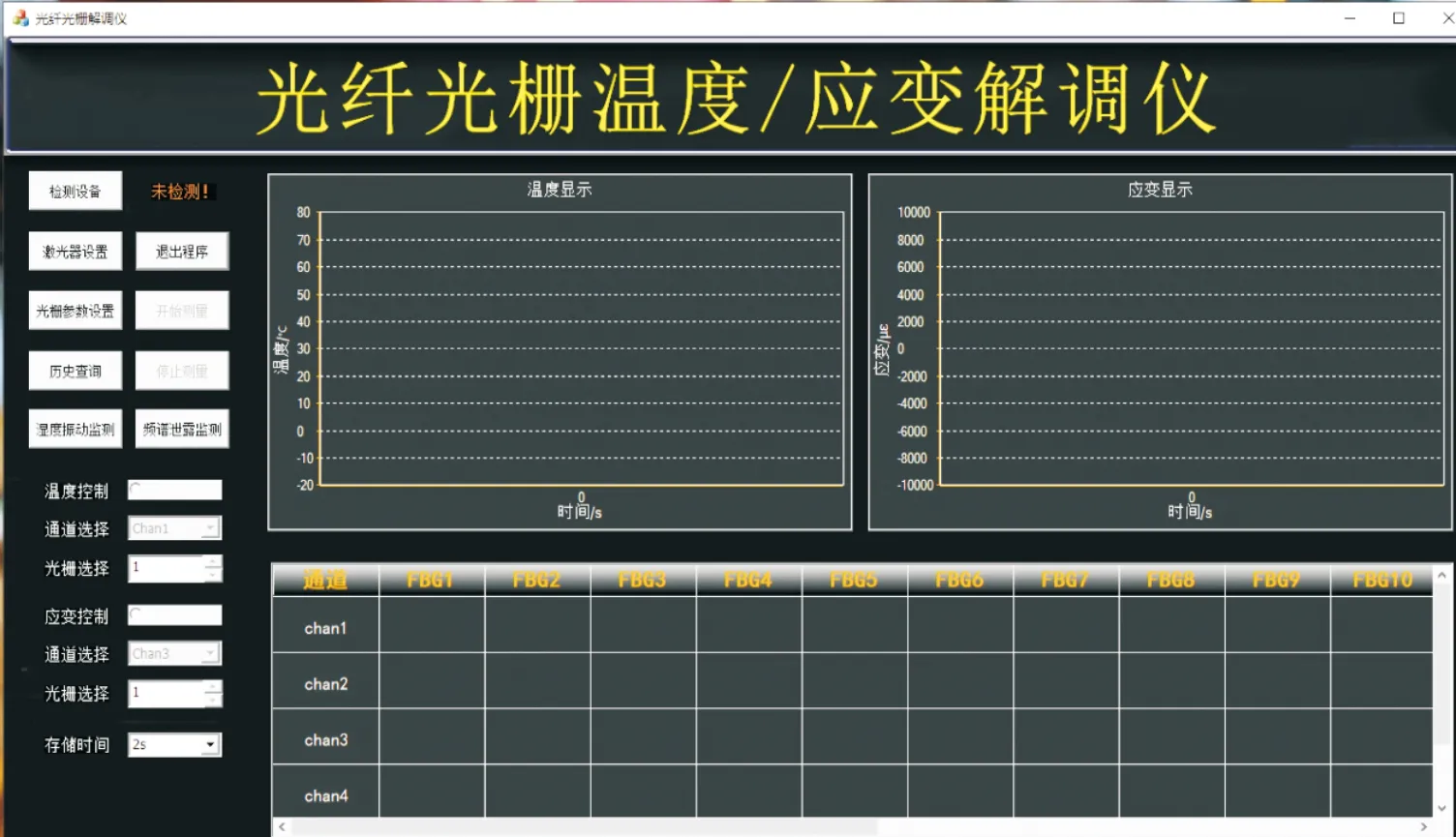
图8 温度、应变上位机界面Fig.8 Temperature and strain main interface of host computer
4.2 湿度、振动数据监测上位机
湿度、振动传感模块的数据回传是通过CAN总线实现的。此模块的上位机由C#编程实现,功能包括串口数据接收、CAN传输波特率选择、CAN接口设备打开与关闭及信息的显示、清空与自动保存以及实时的数据曲线绘制和历史数据查询等功能。其上位机界面设计如图9所示。
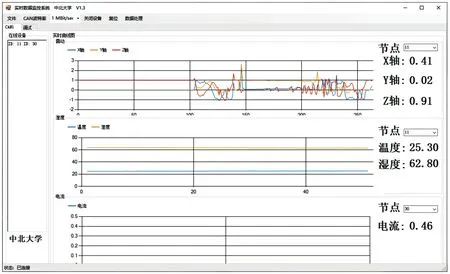
图9 湿度、振动传感上位机界面Fig.9 Humidity and vibration sensor interface of host computer
4.3 频谱监测上位机
接收机频谱监测上位机界面如图10所示。此模块的上位机功能表包括频谱显示、全局峰值显示、基本参量显示、设备内核温度监测、针对基本参数、测量参数与系统参数的设置以及主信号处理器等功能模块。
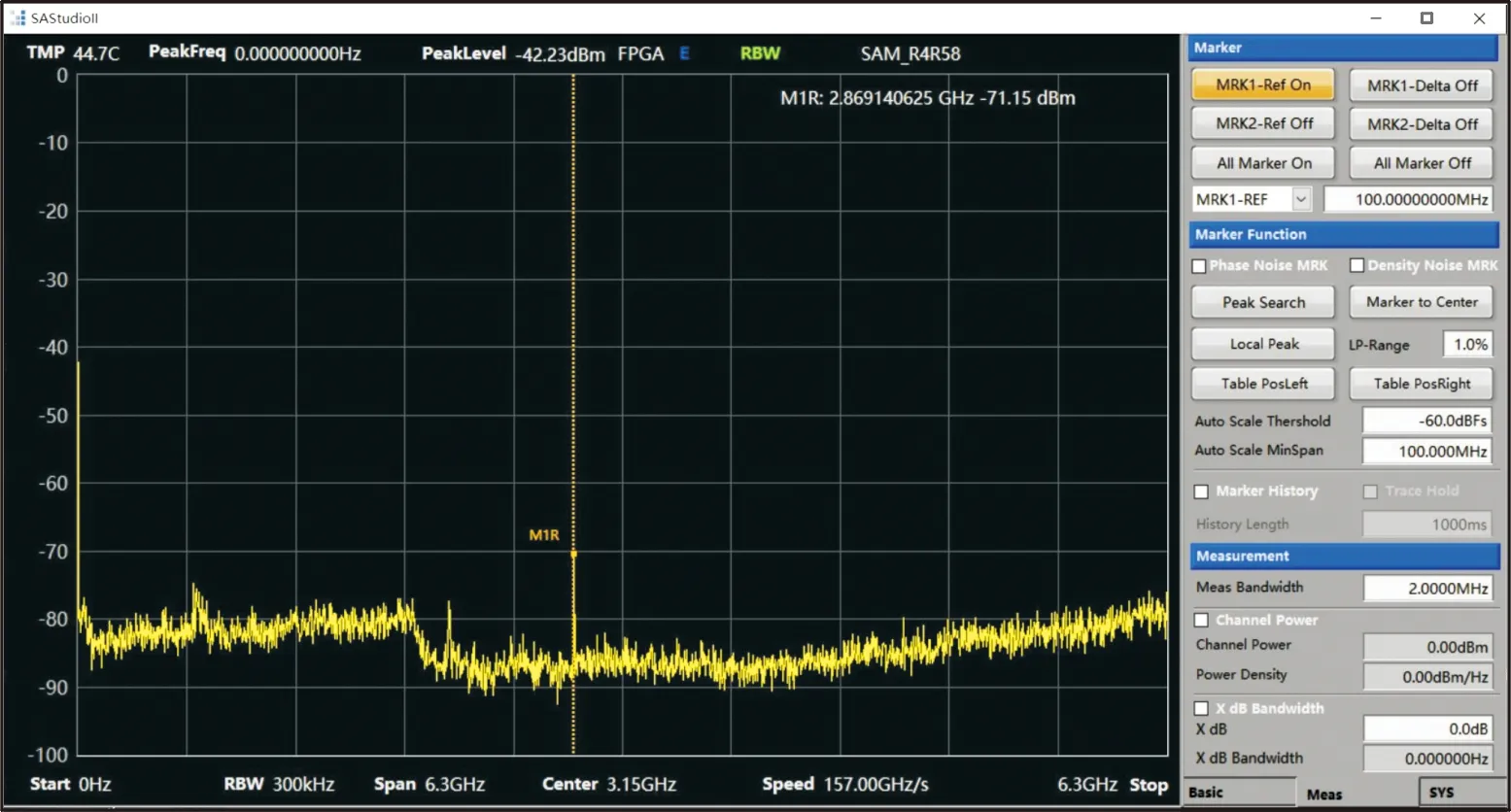
图10 频谱监测上位机界面Fig.10 Spectrum monitoring interface of host computer
5 现场测试及大数据模型分析
5.1 温度传感网络测试
温度环境测量主要面向航天器外围测试的发热、大功率设备对局部环境造成的温度变化测量。实际测试环境中,大型设备内部最大发热温度不超过70 ℃,同时温度传感节点并不直接接触设备,而是围绕测试大厅以及厂房进行分布式布置,因此设定测试阶段最高温度为70 ℃。为模拟应用环境的温度变化情况,通过日常使用的吹风机加热通道2的FBG2传感节点,其余节点放置在不受热源影响的位置测量环境室温,作为实验对照。加热过程中,首先对FBG2进行持续加热一段时间后,让其自然冷却一段时间,而后继续加热,记录温度变化曲线。实验中的温度变化曲线如图11。
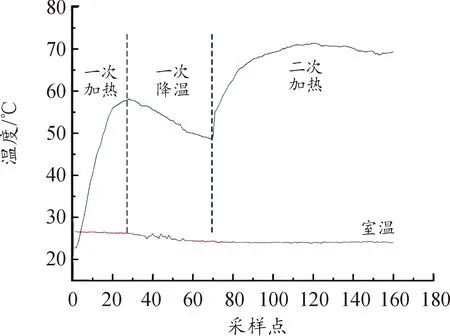
图11 温度变化曲线Fig.11 Variable temperature test
5.2 应力传感网络测试
为监测测试大厅与发射基地内的供电线缆的受损伤情况,将应力光纤光栅传感器与供电线缆贴合固定,一旦供电线缆产生异常形变,监测系统可以实时的显示出此异常。本测试针对线缆的不同弯折情况,分别进行实验并采集数据。实验数据记录如图12(a)所示,弯折过程如图12(b)所示。
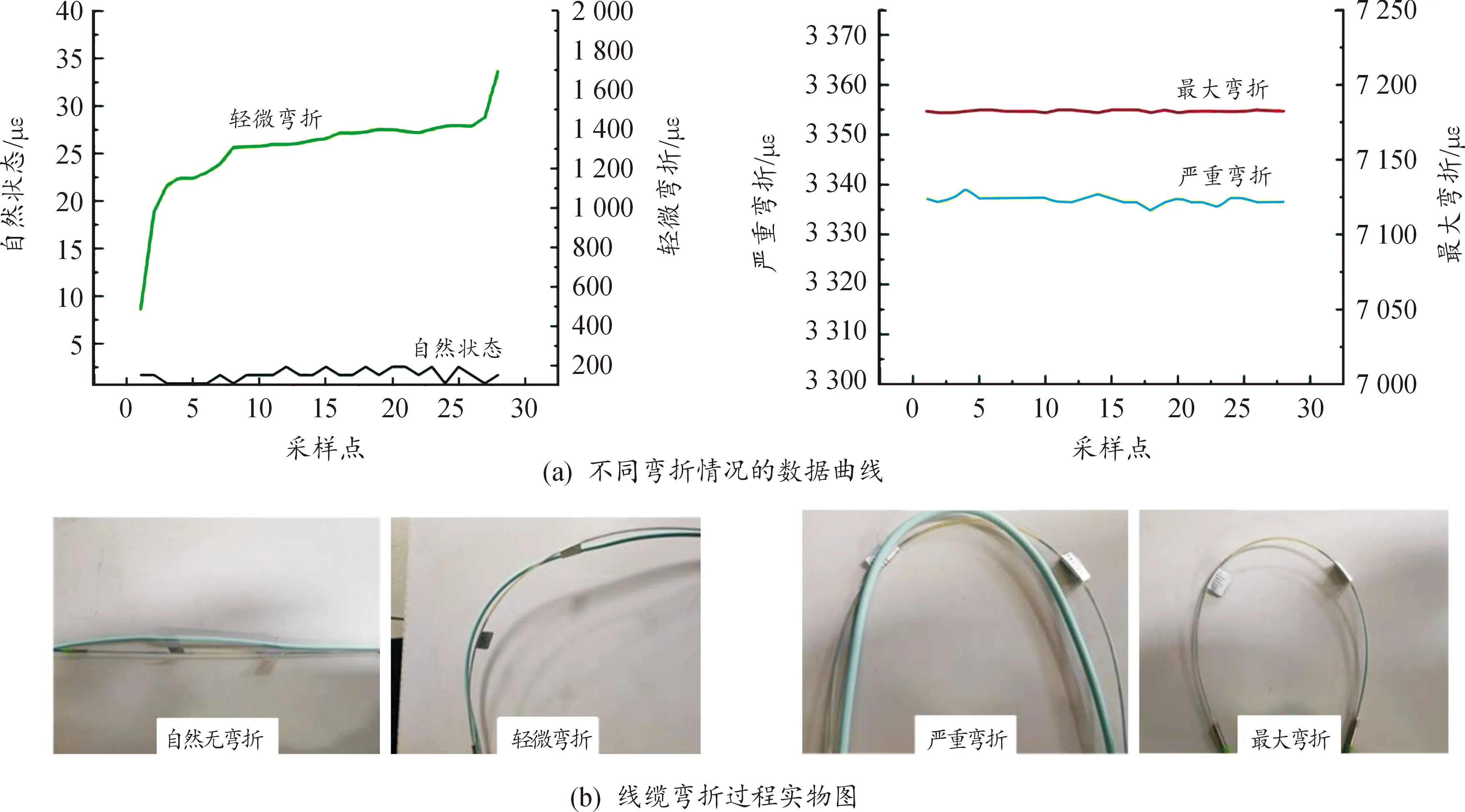
图12 线缆弯折测试Fig.12 Cable bending test
5.3 湿度振动传感网络测试
湿度传感器与振动传感器封装在同一传感节点中,围绕测试厂房分布式布置安装。为进行湿度传感器的功能验证与精确度测试,测试过程中在该传感节点的湿度探头附近放置加湿器,改变测试环境空气湿度的变化。最终测试的湿度变化结果曲线如图13所示,验证了湿度传感器的监测功能。
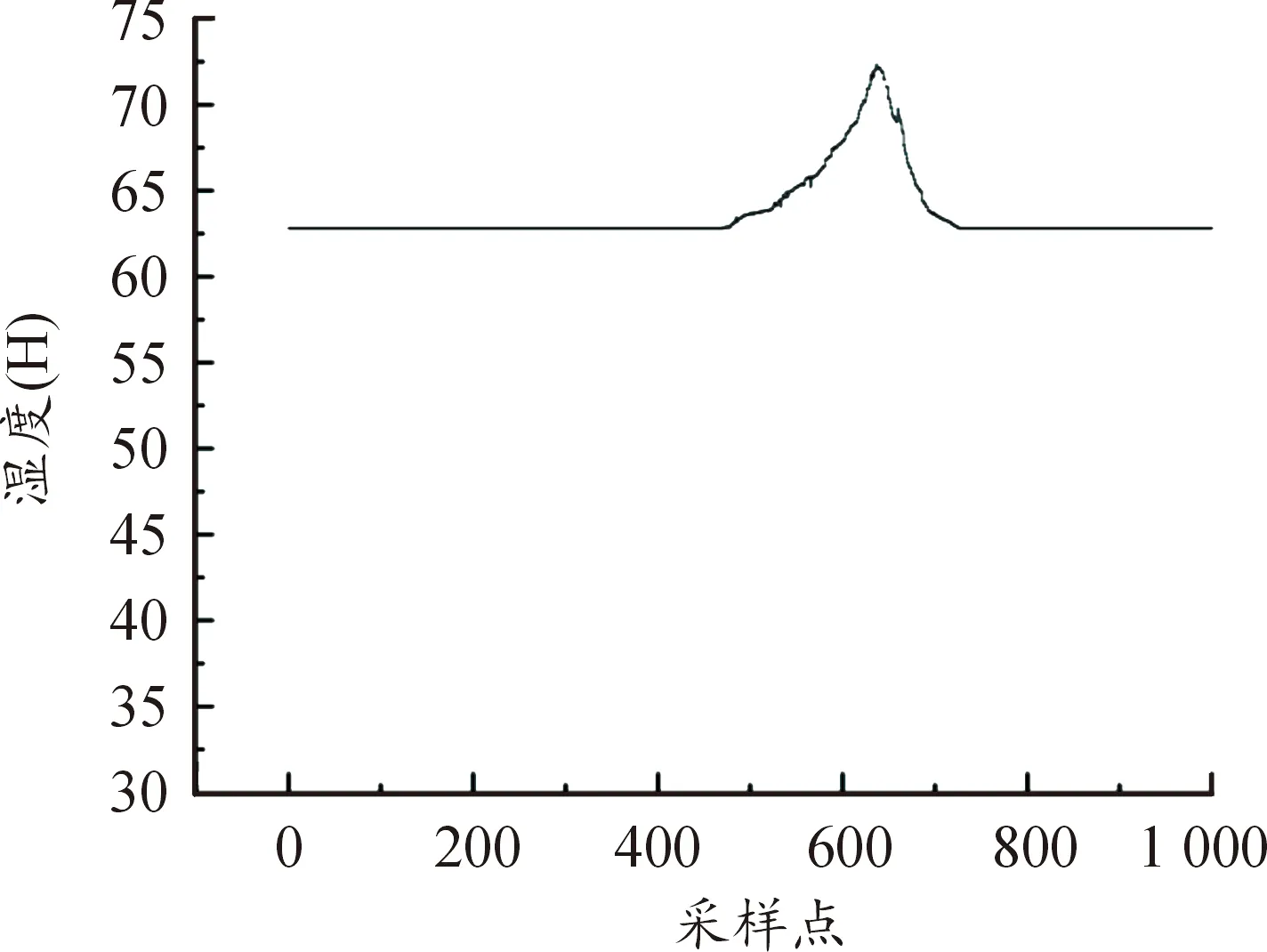
图13 最终测试的湿度变化结果曲线Fig.13 Curve of humidity change
振动监测主要通过监测环境振动,评估航天器运输过程中的设备连接状态,因此主要考虑人员走动和载体拖动产生的振动对设备连接状态的影响。系统设计的振动测试量程为±16 g,量程较大且灵敏度和精确性满足实际应用需求。针对航天器运输过程的设备连接状态的监测,本测试首先测试人物走动时产生的微弱振动并记录其数据曲线,如图14(a)所示。然后将传感节点放置在机械设备上,往复拖动转运载体,进行异常数据的采集与曲线绘制,如图14(b)所示。结果表明本系统的振动传感节点对环境振动量的感知具有极高的灵敏度与准确性。
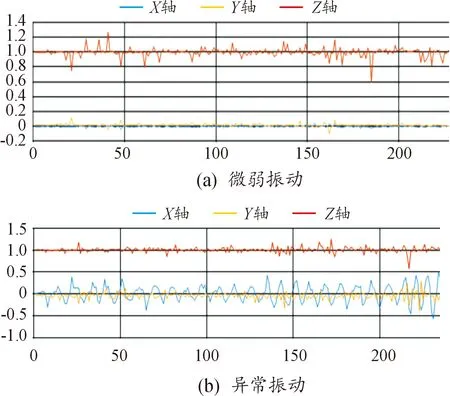
图14 振动测试曲线Fig.14 Vibration test
5.4 电流传感节点测试
电流监测主要针对航天器分阵式供电进行第三方监测,监测供电箱操作平台输出线缆中的电流大小。操作监控室中的供电设备采用二级串联的形式,最大输出电流为15 A,基本满足大多后端设备的用电需求,因此本项测试主要针对电流传感器的测量范围与测量精度进行测试与验证。控制恒流电源产生0.5~14 A的信号,每次提升0.5 A,测试电流传感节点的量程与测量精度,测试场景如图15(a)所示,采集的数据如图15(b)所示。测试结果表明,电流传感节点的误差精度控制在±5%,此误差产生于霍尔元件自身携带的测量误差且在测量时电流环对供电线缆的钳制松紧也会影响测量的结果,满足了地面测试环境监测的应用场景需求。
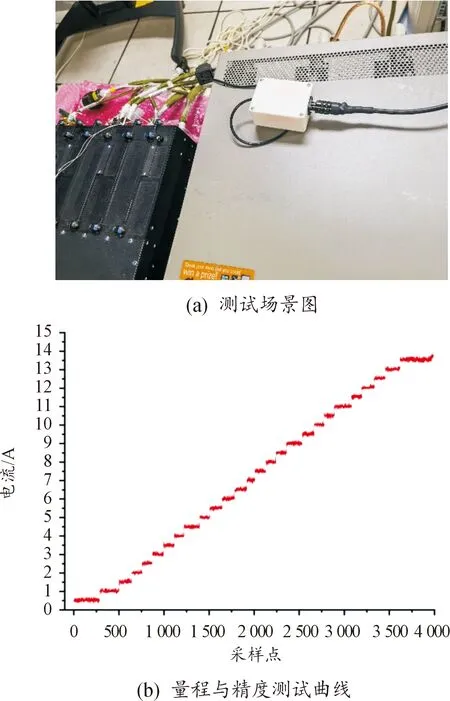
图15 电流测试Fig.15 Current test
5.5 大数据模型训练与数据预测
RF算法的要求较为简单,不会有很高的泛化误差,并通过降低偏差来不断提高最终分类器的精度。模型训练首先生成多个训练集,并对每个训练集构造决策树。分裂节点时,在特征中随机抽取一部分特征并在其中找到最优解应用于节点再进行分裂。RF的方法由于有了集成的思想,实际上对样本和特征都进行了采样,所以可避免过拟合带来的负面影响。
通过模拟不同的异常监测环境并进行大量的数据采集,在传感器网络将多个传感量采集并存储后,输入到建立好的模型进行数据的预处理与模型训练。本模型旨在根据输入数据的值判断节点所处环境是否异样,为了消除数据分布范围对分类器训练的影响,使用0-1标准化将每个数据的特征缩放到0到1的区间上,也就是用“1”表示环境正常,用“0”表示环境异常。
针对温度、应力与振动这3类监测数据的训练与预测结果如表1和表2所示。表中micro表示所有类别总和的性能,macro时每一个类别的性能加和求平均,weighted是每个类别的性能指标求加权平均。而Precision代表模型判定为正的所有样本中有多少是真正的正样本,Recall表示所有正样本有多少模型被模型判定为正,F1则是对Precision和Recall的权衡结果。
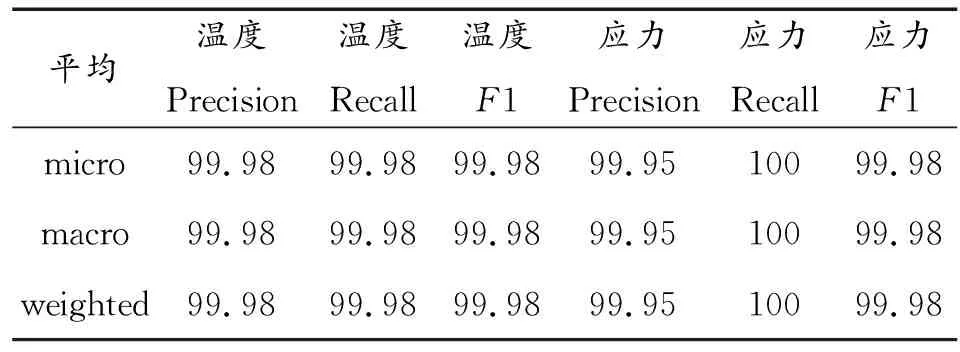
表1 RF分类器的分类性能参数数据(%)Table 1 Classification performance of RF classifier on test sets of temperature and stress data
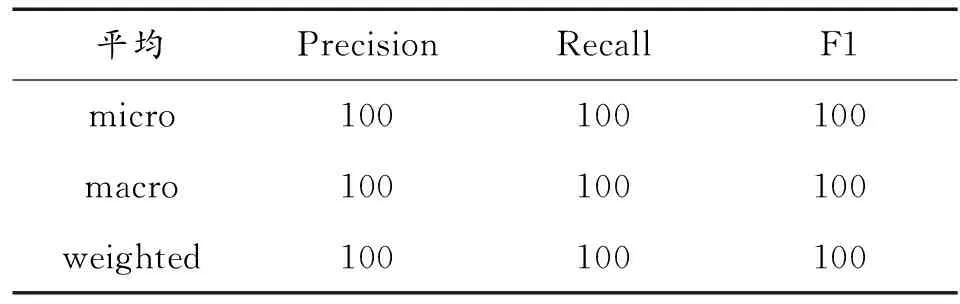
表2 RF分类器在振动数据的测试集上的 分类性能参数数据(%)Table 2 Classification performance of RF classifier on test sets of vibration data
结果显示RF算法在3类数据上的分类性能都非常好,且对数据的预测准确度基本达到全对的结果,在本系统应用于航天器地面测试环境参量监测时可以发挥极佳的数据预测能力。
6 结论
本文提出的针对航天器地面测试环境的关键参量监测的多源阵列传感器网络系统,实现了在不同模式下对监测数据的侧重采集与分析:1) 可以同步、实时监测地面测试环境的温湿度、应力、振动、电流等重要参数;2) 采集速率快、同步性强、融合度高,整套系统采用与航天器系统完全隔离的电源供应和数据传输方式,避免了对航天器产生的干扰;3)通过建立基于随机森林集成算法的大数据预测模型,对传感器网络采集到的数据进行环境异常预测。该研究克服了一般地面测试环境监测系统的参量少、难以覆盖整个测试过程的技术缺陷,将大数据模型训练与异常预测技术加入到传感器网络中,扩大了系统在地面测试中的应用前景。
猜你喜欢
今日农业(2022年15期)2022-09-20
国际太空(2022年7期)2022-08-16
国际太空(2022年2期)2022-03-15
航天制造技术(2022年1期)2022-03-07
中学生数理化·高一版(2021年12期)2021-09-05
智族GQ(2019年9期)2019-10-28
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
汽车观察(2015年10期)2016-04-06