
碰摩引起的双转子系统弯扭耦合振动数值仿真
2022-11-28 13:44李文扩李舜酩王艳丰滕光蓉
航空发动机 2022年5期
李文扩,李舜酩,王艳丰,滕光蓉
(1.南京航空航天大学能源与动力学院,南京 210016;2.中国航发四川燃气涡轮研究院,四川绵阳 621010)
0 引言
转/静子碰摩故障是旋转机械中常见的故障,往往引发系统的弯扭耦合振动[1-2]。同时,双转子系统由于其双频激励的特点使得其内外转子的振动相互耦合,其振动特性更为复杂。对双转子系统引起的弯扭耦合振动进行研究,能够为发动机设计和故障诊断提供依据。
国内外学者对此进行了大量研究。胡鸾庆等[3]研究了单点碰摩,将碰摩严重程度划分为4个阶段;Yang等[4]等发现碰摩时双转子系统会出现双转子基频和倍频的和差组合频率;姚红良等[5]建立了多跨转子系统局部碰摩的动力学模型,发现了非线性现象;Torkhani等[6]研究了轻、中和重度的局部碰摩,建立适用于实际旋转机械的模型能够再现试验台的性能;Paolo等[7]对比分析了有无碰摩的2种情况,发现碰摩增强,弯振幅值减小,扭振幅值增大;张韬等[8]建立了多自由度转子的碰摩模型,提出以扭转振动作为碰摩故障诊断的依据;Xu等[9]发现碰摩时转子振动复杂,存在内外转子组合频率;Asgharifard等[10]发现随着扭转刚度的增大,扭转角幅度变化加快,当扭转刚度达到一定程度后,扭转角幅度变化反而变慢。调整轴承参数[11],转子的峰值位移可以减少足够大的量,以减少碰摩的发生率。流体力增大了振动幅值,降低了振动频率,使系统稳定[12]。阻尼、离心力[13]、负载不平衡量、油膜轴承力[14]也会对碰摩产生影响。
以上研究大多针对相对简单的单转子结构,并未考虑双转子结构,且大多针对单点碰摩或局部碰摩一种碰摩类型进行分析,没有进行对比分析,也没有考虑到转速控制时延对系统振动的影响。对系统振动响应的分析,大多考虑弯曲振动和扭转振动,而考虑弯扭耦合振动的研究较少。
本文针对共腔结构的双转子航空发动机,建立了双转子系统动力学模型,进行了数值仿真,研究了参数变化、碰摩类型和转速控制时延等对双转子系统弯扭耦合振动响应的影响。
1 双转子集中质量模型
本文研究对象为共腔结构的航空发动机的双转子系统(如图1所示),采用集中质量法建立数学模型。外转子系统包括2个轴颈质量m1、m8,6个刚性转盘质量m2~m7和无质量弹性转轴。内转子系统包括2个轴颈质量m9、m10,1个刚性转盘质量m11和无质量弹性转轴。系统中的4个支承都采用轴承加弹性支承的结构,可简化为弹簧阻尼结构,刚度为k1、k2、k3、k4,阻尼为c1、c2、c3、c4。

图1 航空发动机双转子系统
从图中可见,支承3将外转子与共腔结构连接在一起,支承4将内转子与共腔结构连接在一起,内外转子之间存在耦合现象。外转子轴段l1~l7的弯曲刚度为k5~k11,弯曲阻尼为c5~c11;内转子轴段l8、l9的弯曲刚度分别为k12、k13,弯曲阻尼分别为c12、c13。外转子轴质量m1~m2、m2~m3、m3~m4、m4~m5、m5~m6、m6~m7之间扭转刚度分别为kt1~kt6,扭转阻尼分别为ct1~ct6;内转子轴质量m9~m11之间扭转刚度为kt7,扭转阻尼为ct7。各刚性转盘存在偏心距ei(i=2~7、11),在外转子转盘m3处发生碰摩故障。
内外转子轴颈质量考虑弯曲振动,广义坐标为(xi,yi)(i=1、8、9、10),转盘质量考虑弯曲振动和扭转振动,坐标为(xi,yi,αi)(i=2~7、11)。其中:xi、yi为位移坐标;αi为扭转坐标。故本文的双转子系统共29个自由度。
2 双转子数学建模
根据上述的集中质量模型,利用力学理论,结合碰摩力、不平衡力、轴承等支承刚度、阻尼,得到航空发动机双转子系统的动力学微分方程共29个。
其中,x方向上弯曲自由度的方程11个

y方向上弯曲自由度的方程11个

扭转自由度的方程7个
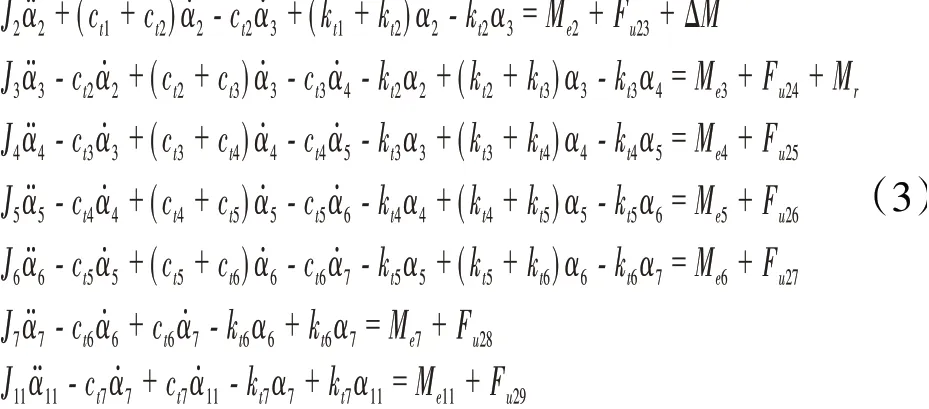

式中:Ji=miRi2/2(i=2~7,11),为盘对形心的转动惯量;Ri为转盘半径;φi=ω1t+αi+ψi(i=2~7),为外转子轴上转盘质心的相位角;φ11=ω2t+α11+ψ11,为内转子轴上转盘质心的相位角;ω1为外转子的转速;ω2为内转子的转速;ψi(i=2~7,11)为初相位;Frx、Fry为碰摩力在x、y方向上的分力;Mr为碰摩力矩。
3 碰摩力模型
3.1 单点碰摩
单点碰摩是指在旋转过程中,转子的相对振动量超过转静子之间的最小间隙,使得转静子发生点接触的现象。其碰摩力模型[15]如图2所示,有x方向上的碰摩分力Frx和y方向上的碰摩分力Fry。
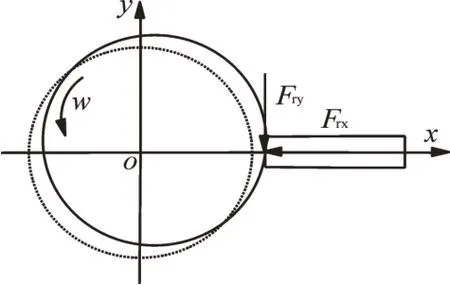
图2 单点碰摩
具体表达式为

式中:r=x3,r为转盘与机匣的相对位移,当r≤δ时,未发生碰摩,当r>δ时,发生碰摩;x3为转盘3沿x方向的位移;δ为碰摩间隙;kr为碰摩刚度;f为摩擦系数。
3.2 局部碰摩
局部碰摩是指在旋转过程中,转子的相对振动量超过转静子之间的最小间隙,使得转静子上多点、某个或几个区域相接触的现象。其碰摩力模型[16]如图3所示。图中,Fn为转盘与机匣间的法向力,Fτ为切向力,在xoy坐标系中,可分别表示为沿x方向上的分力Frx和沿y方向上的分力Fry。

图3 局部碰摩
具体表达式为

摩擦力对转盘的摩擦力矩Mr为

4 转速控制时延模型
当双转子系统以稳定的转速运行时,若受到外来因素的干扰,转速会发生改变,此时系统会附加1个控制力矩ΔM来抑制转速的变化;但实际上,这个控制力矩会存在一定的时间延迟,引起双转子系统的弯扭耦合振动。本文进行数值仿真时假设控制力矩施加于转盘2所在位置,力矩M和转速ω之间的关系[17]为

转速变化量为Δω,力矩变为

则系统附加的控制力矩ΔM为

略去高阶小量Δω2后,得到

式中:U为控制系数;t′为延迟时间,即系统附加控制力矩ΔM是由t-t′时刻的φ̇所得到,所以控制力矩存在时间延迟。
5 参数取值
本文中使用的如转子轴质量、弯曲刚度、扭转刚度、弯曲阻尼、扭转阻尼、转盘半径、摩擦系数、控制系数等计算参数见表1。

表1 计算参数
6 仿真分析
本文采用4阶龙格库塔法求解上述微分方程组,通过改变各转盘偏心距、碰摩刚度来分析参数变化对系统振动响应的影响;通过单点碰摩和局部碰摩的对比来分析碰摩类型对系统振动响应的影响;通过无转速控制时延和不同时延周期的对比,重点分析转速控制时延对系统振动响应的影响。频谱图中包含3种特征频率:(1)外转子的基频f1和内转子的基频f2;(2)由于碰摩作用而引起的外转子基频f1的倍频分频和内转子基频f2的倍频分频;(3)内外转子基频和倍频分频之间耦合的组合频率。
6.1 转盘偏心距对系统振动特性的影响
参照试验台测值,取碰摩刚度kr=5×106N/m、碰摩间隙δ=1.20×10-4m、外转子转速ω1=800 rad/s、内外转子转速比为1.25,依次分析各转盘偏心距分别为e=3.0×10-5、3.4×10-5m时双转子系统在转盘3处的振动响应,仿真结果如图4、5所示。

图4 e=3.0×10-5 m时系统的振动响应
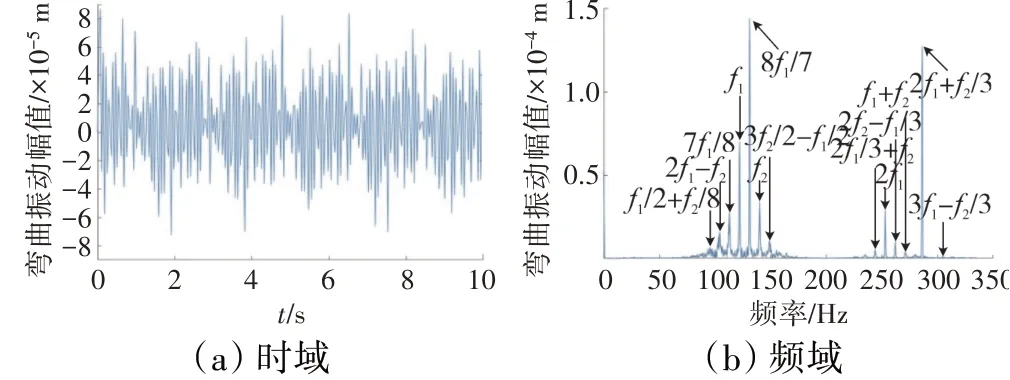
图5 e=3.4×10-5 m时系统的振动响应
从时域图的对比来看,系统的振动幅值随着偏心距的增大而增大。从频域图的对比来看,特征频率的幅值也随着偏心距的增大而增大,且偏心距较大时存在连续的频率区域,特征频率丰富,其主要特征频率成分基本一致,以组合频率为主,倍频分频成分较少。偏心距的增大,加剧了由碰摩引起的弯扭耦合振动。
6.2 碰摩刚度对系统振动特性的影响
参照试验台测值,取转子各转盘的e=3×10-5m,ω1=800 rad/s,内外转子转速比为1.25,δ=1.2×10-4m,依次分析kr=6×106、9×106N/m时双转子系统在转盘3处的振动响应,仿真结果如图6、7所示。

图6 kr=6×106 N/m时系统的振动响应

图7 kr=9×106 N/m时系统的振动响应
从时频图的对比来看,双转子系统的振动幅值随着碰摩刚度的增大而增大。从频域图的对比来看,碰摩刚度较小时,特征频率以外转子的分频和组合频率为主,内转子的倍频成分较少;碰摩刚度较大时,特征频率以组合频率为主,外转子分频成分有所减少,内转子倍频成分依旧较少。碰摩刚度的增大,加剧了由碰摩引起的弯扭耦合振动。
6.3 不同碰摩类型对系统振动特性的影响
参照试验台测值,取各转盘e=3×10-5m、kr=7×106N/m、δ=1.10×10-4m、ω1=645 rad/s,内外转子转速比为1.25,分别分析在单点碰摩和局部碰摩下双转子系统在转盘3处的振动响应,仿真结果如图8、9所示。
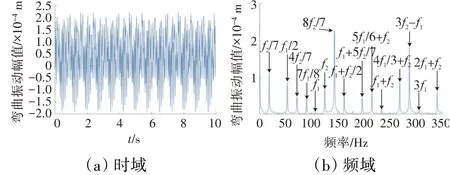
图8 单点碰摩时系统的振动响应

图9 局部碰摩时系统的振动响应
从时域图的对比来看,二者的振幅相差并不大。从频域图的对比来看,局部碰摩的振幅要比单点碰摩的稍大,且特征频率要比单点碰摩的丰富,还存在一些微弱的连续频率成分。2种碰摩类型的特征频率都有较多的内转子倍频分频成分和组合频率成分,但外转子的倍频分频成分较少。局部碰摩的弯扭耦合振动要比单点碰摩的剧烈。
6.4 转速控制时延对系统振动特性的影响
参照试验台测值,取各转盘e=3×10-5m、kr=7×106N/m、δ=1.20×10-4m、ω1=800 rad/s、内外转子转速比为1.25、转速控制时延在0~15个周期左右,分别分析不存在转速控制时延、延迟5个周期和延迟15个周期时双转子系统在转盘7处的振动响应,仿真结果如图10~12所示。同时,对不存在转速控制时延和存在转速控制时延的轴心轨迹做了对比分析,如图13所示。
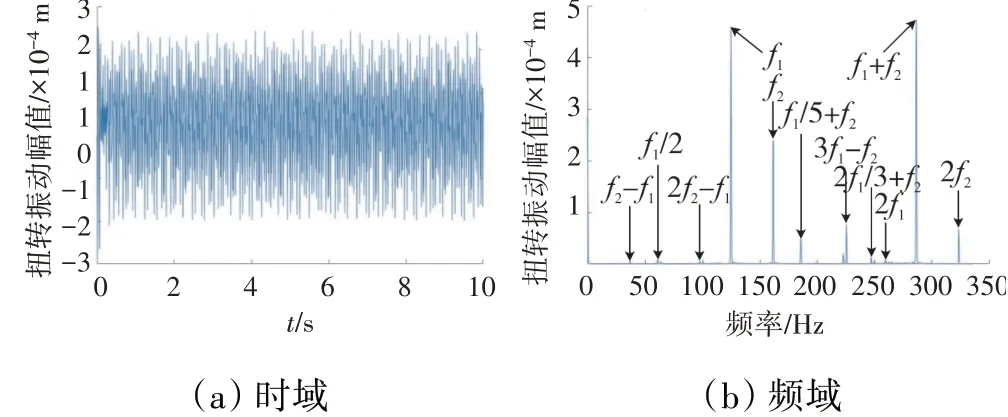
图10 不延迟时系统的振动响应

图11 延迟5个周期时系统的振动响应
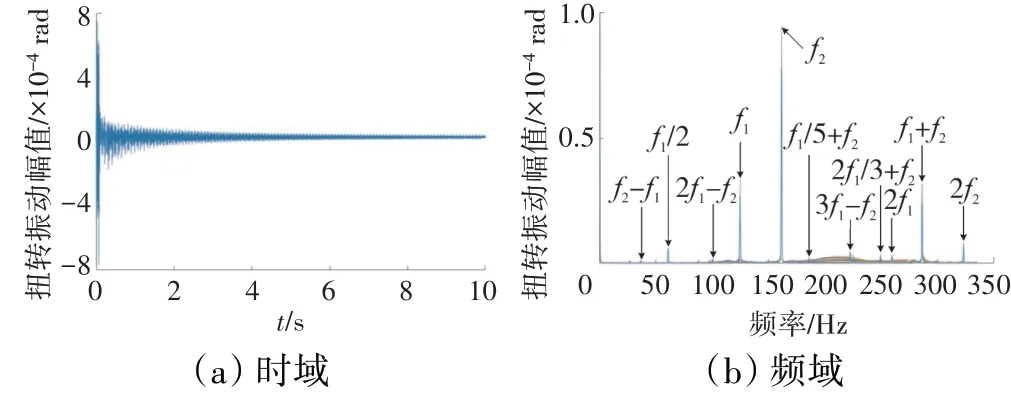
图12 延迟15个周期时系统的振动响应

图13 不存在转速控制时延与延迟5个周期时轴心轨迹
与上述所有图不同的是,此时选取的是扭转振动的时频域图,发现扭转振动频谱中同样存在与弯曲振动相似的基频、倍频分频和组合频率,这是因为弯扭耦合作用下,弯曲振动的特征能够传递到扭转振动中。从时域图的对比来看,存在转速控制时延时,初始振动不稳定,振动幅值比不存在转速控制时延时的大,然后逐渐减小,而且延迟15个周期时的初始振动幅值比延迟5个周期时的大。另外,当不存在转速控制时延时,振幅不存在衰减,且振幅明显高于存在时延的稳定状态,这是因为转速控制力矩对航空发动机的双转子系统提供了负阻尼。
从频域图的对比来看,特征频率的成分差别不大,振动幅值有所波动,存在转速控制时延时,出现了一些微弱的连续的频率成分,而且延迟的周期越大,这些微弱的连续的频率成分越多越明显。从轴心轨迹图的对比来看,转速控制时延为5个周期时的轴心轨迹比不存在转速控制时延时的更加分散,也更加杂乱,可见转子扭转振动的不稳定也影响到了转子的弯曲振动。
7 结论
(1)航空发动机双转子系统弯扭耦合振动的振动响应要比单转子系统的复杂,其频域图中存在单转子中没有出现的组合频率。
(2)弯曲振动的基频、倍频分频和组合频率等特征频率会在碰摩双转子系统的弯扭耦合作用下传递到扭转振动中,使得扭转振动中也包含与弯曲振动相似的频率成分。
(3)参数变化会对系统的弯扭耦合振动造成很大影响,碰摩刚度、偏心距的增大都会加剧碰摩引起的弯扭耦合振动。局部碰摩的特征频率成分比单点碰摩的丰富,弯扭耦合振动更加剧烈。
(4)转速控制时延会使系统的振动不稳定,使初始幅值变大,轴心轨迹变乱,且延迟15个周期时比延迟5个周期时,系统更加不稳定,初始幅值增大了接近3倍,但特征频率成分的影响不大。
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24
科技创新与应用(2020年4期)2020-02-25
山东冶金(2019年5期)2019-11-16
光学仪器(2019年3期)2019-02-21
制造技术与机床(2018年12期)2018-12-23
雷达学报(2018年1期)2018-04-04
湖北农业科学(2017年12期)2017-07-15
山东工业技术(2016年15期)2016-12-01
信息记录材料(2016年4期)2016-03-11
大庆师范学院学报(2015年3期)2015-12-24
