水面舰船坞修项目进度风险仿真
2022-12-03 10:18宋庭新
湖北工业大学学报 2022年4期
卢 引,宋庭新
(湖北工业大学机械工程学院,湖北 武汉 430068)
舰船系统是一个典型的复杂装备系统。在舰船修理过程中,各种不确定性因素导致维修故障不尽相同,进而带来不同的损失程度。如果在舰船维修过程中没有充分认识到风险之间的差异,就可能使维修工作的重点不突出,导致维修效率低下和维修资源的浪费,造成项目进度拖延。为了保持和恢复舰船的战术技术水平,找到一种对舰船修理进度风险进行识别和评估的方法十分重要。
国内外对工程项目进度风险的评估方法主要有网络计划技术、离散事件系统仿真、系统动力学模型等。Bates在考虑工序间逻辑和工序用时不确定的情况下,运用计划评审技术(PERT)对工程项目进行了风险评估研究[1]。Choudhry运用蒙特卡洛对桥梁建设项目进行仿真,将实验结果与实际相比较,验证了仿真模型的可靠性[2]。Alvanchi运用离散事件仿真对装配式结构的施工进度计划建立模型并进行仿真模拟评估,得到最大优化方案[3]。Luu等通过问卷调查法和专家访谈调查得到16个风险因素,以此建立建设项目工期延误的贝叶斯网络模型,并根据现实案例进行仿真,验证了该模型的有效性[4]。柴国荣通过系统动力学的方法从进度的视角构建地铁项目施工风险模型,并对影响进度压力的3个关键变量进行重要性排序[5]。钟登华等采用离散事件系统仿真工程项目进度,从风险和完工概率出发,较好模拟了工程项目进度计划的不确定性[6]。然而,网络计划技术只适用于工序关系明确的工程项目,且对项目进度风险估算比较粗略;离散事件系统仿真主要为具有多种随机因素的工程项目进度控制提供操作层面上的支持,但难以解决复杂工程项目中大量存在的多次返工问题,不能充分体现系统内各因素之间的交互影响;系统动力学通过项目内部结构进行建模仿真寻求系统的较优结构和功能,但难以处理逻辑复杂的工序动态调整问题。舰船这种复杂装备系统,由于工程结构复杂,维修返工次数多,风险因素多,采用上述方法均无法达到良好的评估效果。而多智能体系统适用于复杂开放的分布式系统,且模型中的每个智能体易于扩展,具有自组织能力、学习能力和推理能力。各个智能体通过合作、协调以及通讯共同完成任务[7]。本文依托各个智能体中的状态变迁组件对舰船维修项目建模,使复杂问题变成单一对象,运用各智能体信息传递及灵活性建立了舰船维修项目进度风险模型,通过仿真和灵敏性分析,对风险进行重要性排序,然后验证风险模型的可靠性,为风险监控策略提供了有益参考。
1 水面舰船坞修项目进度分析
1.1 舰船坞修项目分解
科学的维修手段及维修管理是舰船能够维持良好状态性能,并保持战斗力持续生成的前提。舰船修理级别一般分为坞修、小修和中修。其中,坞修为舰船的首次等级修理,主要是对船体结构、动力装置进行局部性拆卸检查修理和其他故障设备进行维护修理[8]。水面舰船坞修项目工程项目主要分为修前准备、工程修理以及试验验收和技术服务等3个阶段。本文通过对3个阶段的细化得到15个工序,从而得到舰船坞修项目分解(图1)。
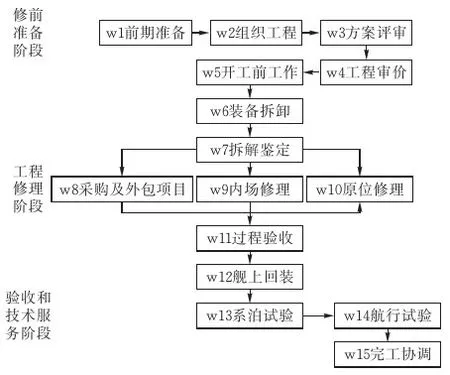
图1 项目工序分解
1.2 水面舰船坞修进度风险识别
在舰船修理过程中,各种不确定性因素导致的维修故障不尽相同,带来的损失严重程度一般也不同。水面舰船坞修项目进度风险管理的前提是有效识别影响项目进度的风险因素。在风险管理理论的3个主要阶段中,风险识别是进行有效风险评估和控制的前提。
风险识别在有效风险管理中起主导作用。本文在项目工序分解的基础上,全方位地识别进度风险,通过对进度风险的风险因素、风险后果和影响损失进行综合过滤与评级,筛选出坞修项目各阶段最主要的20个风险因素(表1)。在此基础上,通过故障模式与影响分析(FMEA)方法建立各维修进程风险识别表。其中,R11~R16,R17~R27,R28~R30分别属于修前准备阶段、工程修理阶段、验收服务阶段识别的风险。笔者选取了部分风险因素进行说明(表1)。
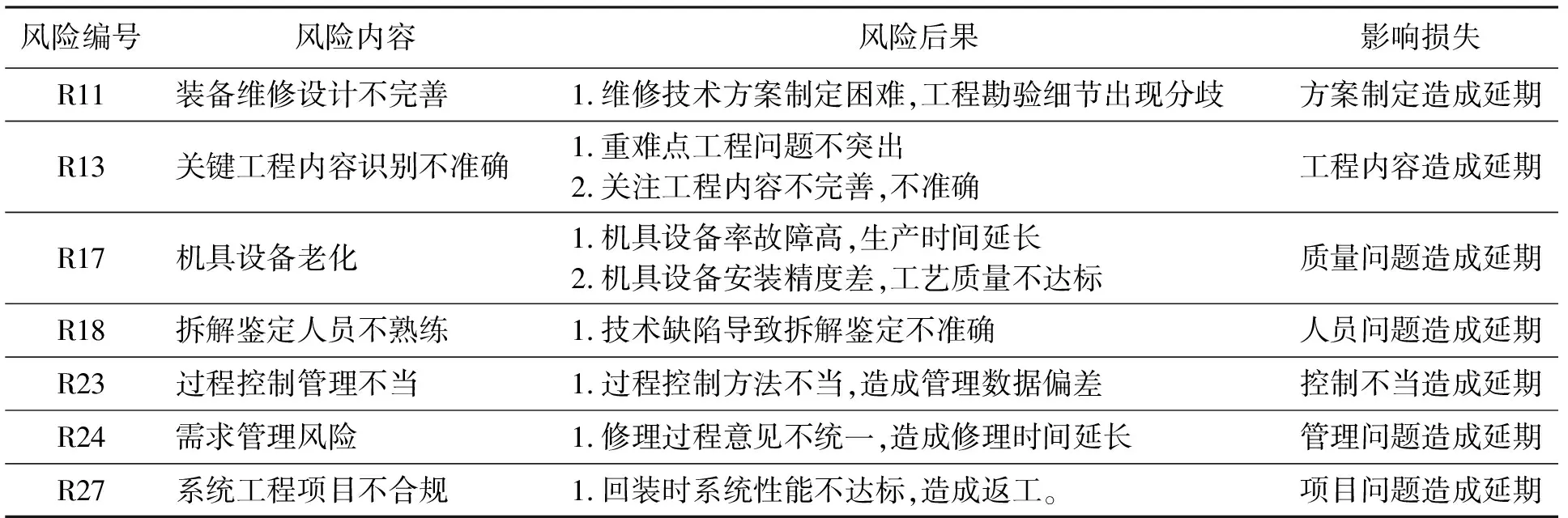
表1 维修进程风险识别表(部分)
2 进度风险评估模型的建立
2.1 建模思路
根据水面舰船坞修项目中串并联的连接方式,将项目中最主要的项目风险与其相对应的工序进行对应,由“风险单元”智能体判断出单个进度风险所对应的威胁隶属度(轻微、一般、较重、严重),并反馈到项目的工序之中。在每个工序风险判断完成后,根据每个工序风险所出现的威胁程度将结果反馈到主工序当中,从而完成整个建模过程。进度风险评估模型建模思路如图2所示。

图2 进度风险评估模型建模思路
水面舰船坞修项目具有范围宽、内容多、周期长、工序关联强等特点,传统的建模方法很难反映各工序之间的关系,从而无法达到良好的评估效果。本文采用Anylogic软件对水面舰船坞修进度风险评估问题进行建模仿真,采用自底向上的建模方法,在对舰船系统中的个体行为和特征展开研究后,按照舰船维修项目特点构建“工序单元”和“风险单元”两个智能体。通过两个智能体之间互相独立又交互的关系,实现系统整体的结构和功能,解决复杂的逻辑问题。
2.2 “工序单元”智能体的建立
舰船维修项目由一个个工序所构成,每个工序之间存在着复杂的逻辑关系。“工序单元”智能体通过端口port进行通讯,各端口是由消息连接起来的,从而保证各“工序单元”智能体间的消息传递。
2.2.1内部参数设置设置工序流程时长参数和计划工期参数。工序流程时长参数指的是舰船坞修项目工序中每一个工序计划的平均流程时长;计划工期参数指的是舰船坞修项目工程计划完成坞修的时间。
2.2.2变量设置设定前置工序个数、前置工序完成度、风险个数、时间流逝速度、开始时间、完成时间变量。
2.2.3状态变迁工序单元模块包含待命、工序进行中、等待信号、完成等状态。设计 “工序单元”智能体的状态图(图3)。
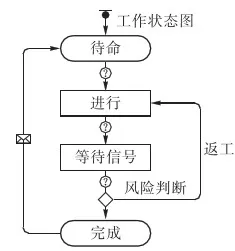
图3 “工序单元”智能体的状态图
图3中,工序单元初始位置在“待命”状态,在前置工序完成度与前置工序个数相等时,工序状态图变迁到“工序进行中”状态,这确保了工序前序的工作全部完成后才能进入下一工序。在剩余时长小于0时,“工序进行中”状态会变迁到“等待信号”状态。工序单元中存在一个“风险判断”分支,用来判断某一维修工序中的进度风险是否发生。当剩余时长>0时,被认为该工序单元中的风险触发,需要进行“返工”,工序状态继续变迁到“工序进行中”状态,等待进一步的“风险判断”,直到工序无风险时才能变迁到“完成”状态。“完成”状态到“待命”状态的消息变迁,其触发的消息为main层中最后一个工序发出的“重置”信号,用于模拟所有工序完成后对所有工序单元的重置操作。
2.3 “风险单元”智能体的建立
每个维修工序单元存在着不同的进度风险,当进度风险发生时,会对工序单元造成不同程度的“返工”。“风险单元”智能体通过端口与“工序单元”智能体相连接,从而实现信息相互传递。风险单元内部需要考虑不同程度的返工时长分布、风险发生的可能性,以及风险隶属度的判断等多重情况,使项目进度更加符合现实。
2.3.1内部参数设置风险因素发生率、风险后果发生率、风险隶属度概率、返工时长数组分布。风险因素和风险后果发生率是指风险发生可能性大小以及风险造成延期的可能性大小;风险隶属度概率是工序发生“轻微威胁”“一般威胁”“较重威胁”和“严重威胁”的概率,分别为P1、P2、P3、P4。
2.3.2变量设置设定反馈时长、不同威胁发生次数、随机因子发生概率、返工时长数组分布。反馈时长指的是不同风险因素造成工序返工所需时长;随机因子发生概率指的是系统随机生成0-1因子发生的概率;返工时长数组分布对应发生不同类型威胁时所造成的返工时长。
2.3.3状态变迁通过“风险单元”各状态的逻辑关系,设计 “风险单元”智能体的状态图(图4)。

图4 “风险单元”智能体的状态图
图4中,“风险单元”智能体初始状态为“进度无风险”,当收到由“工序单元”智能体传递的特定消息时,开始进行风险判断。分支到“进度有风险”状态的条件为随机因子发生的概率小于风险因素发生概率与风险后果发生概率的乘积,当智能体判断出进度有风险时,会对进度风险进行下一步的隶属度判断。风险隶属度分别是“轻微威胁”“一般威胁”“较重威胁”“严重威胁”4种状态,由系统设定随机数0-1的风险因子,从而判定风险的隶属度情况。在风险隶属度判定完成后,系统会记录各种威胁发生的次数,并且对不同威胁造成的时长返工反馈给对应的“工序单元”智能体,从而完成风险判断过程。
3 仿真结果分析
3.1 数据的获取
从项目进度出发,通过对风险特性(即发生概率和影响程度两个维度)的分析,判断风险的重要程度。建立风险隶属度评估标准,将工程实际进度风险控制要点纳入风险隶属度评分体系,通过风险隶属度评判风险发生轻微、一般、较重、严重影响的概率,用隶属度R= {轻微,一般,较重,严重} 作为风险评定集,设定评分标准总分为100分,60分(c)为合格标准,75分(b)为良好标准,90分(a)为优秀标准。评价标准条款包括得分项与扣分项。当发现过程管理不合规或系统检测结果没有达到标准时,对风险评分进行扣分,以更客观地反映工程不同阶段各类风险大小,并采用正态分布法计算隶属度概率。

由此得出各项风险隶属度R={r1,r2,r3,r4}。r1、r2、r3、r4分别为第i项风险对项目造成轻微影响、较轻影响、较重影响、严重影响的概率。
基于表1的风险识别列表,分别对风险发生的可能性以及风险可能造成的后果因素进行定量评估,得到进度风险因素发生率和进度风险后果发生率,用其乘积确定进度风险因素损失率,最终得到初始数据[9](表2)。
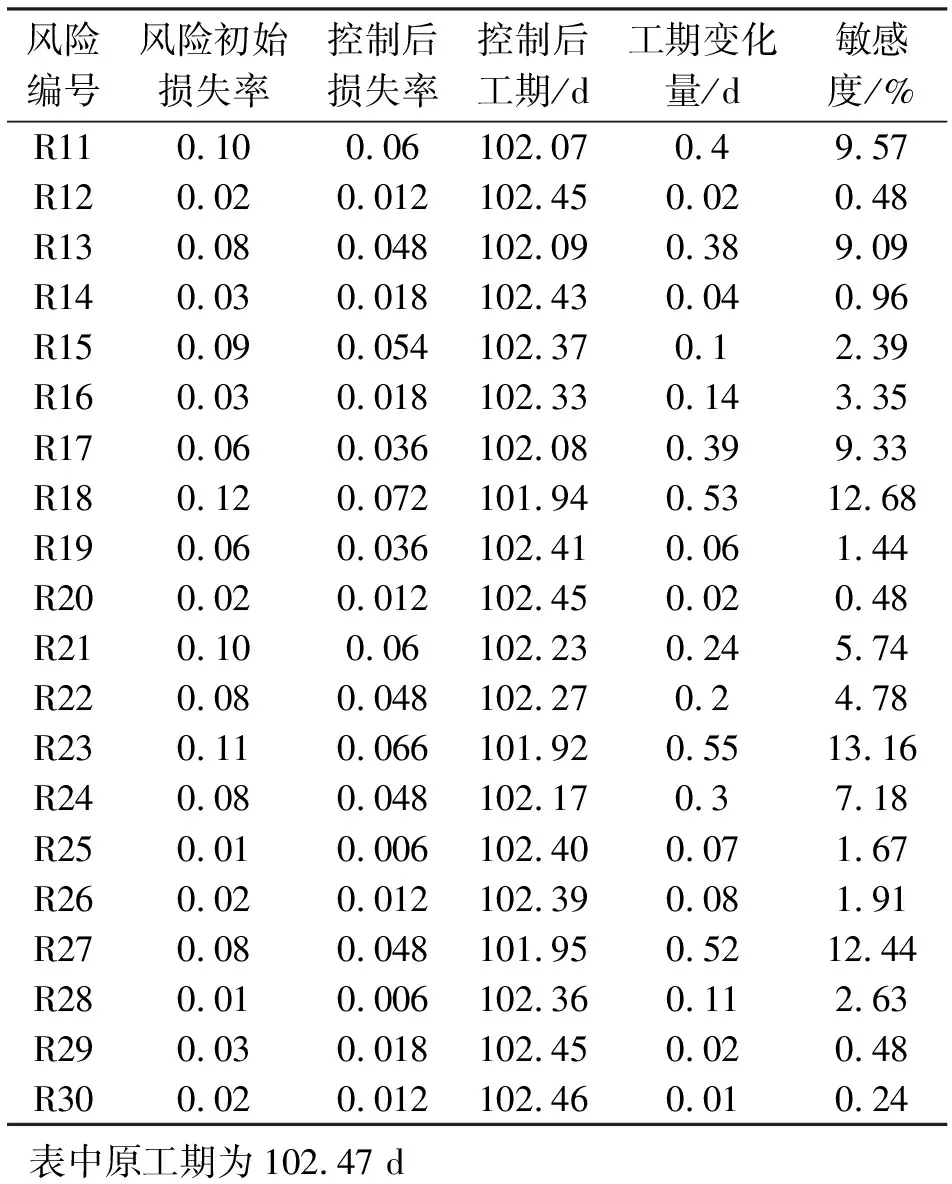
表2 控制前后参数变化
3.2 模型实现
根据水面舰船坞修项目特点,将最主要的风险与工序相对应,使用计算机建立水面舰船坞修进度风险仿真模型。将表2的初始参数输入模型中进行仿真,仿真运行界面如图5所示。图5中已完成的工序用蓝色圆圈表示,正在进行的工序用绿色圆圈表示,未完成的工序由白色圆圈表示。矩形小方块表示风险单元,分别用4种不同颜色表示出现轻微威胁、一般威胁、较重威胁和严重威胁,绿色表示没有发生风险威胁。
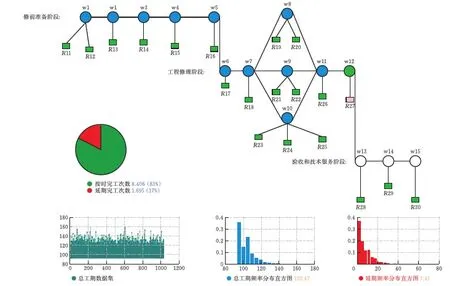
图5 舰船坞修进度仿真界面
3.3 结果分析
3.3.1风险敏感性因素根据获取的数据,对水面舰船坞修进度风险模型进行了10000次仿真,得到未对风险进行控制的总工期均值为102.47 d,延期工期均值为7.41 d,水面舰船坞修项目进度延期概率为17%。通过对各风险进行敏感性因素分析,进而分析各风险因素对维修总工期的影响程度,以便采取不同程度的风险应对方法进行监控。将各项风险因素缺陷率逐一下降40%,控制其他风险指标保持不变,通过仿真计算各项风险因素缺陷率下降40%后,对项目进度的影响以及相对变化量。仿真计算结果如表2所示。其中,敏感度由每个风险所对应的工期变化量与总工期变化量之和的比值计算得出。从表2可以看出,R18、R23、R27风险敏感度最高,缺陷率的下降导致总工期的减少也较高,敏感度均在10%以上。因此,在进行风险控制时,应最先考虑这3个因素。另外R11、R13、R17、R24风险敏感度较高,风险内容主要为人员管理和机具老化等问题,也应该优先考虑对其进行风险控制。
3.3.2风险控制前后仿真结果在充分考虑减少成本的条件下,采用风险控制等手段,按照风险重要性排序对其进行差异化控制,将R18,R23,R27损失率减少50%,将R11,R13,R17,R24损失率减少30%,其余的风险因素损失率减少10%。将控制后的数据输入多智能体模型中仿真10 000次以上后,与控制前的仿真结果进行对比。
从图6可以看出,在没有采取风险监控手段前,总工期频率平均值为102.47 d。控制后,总工期频率平均值为98.94 d,降低了3.53 d,与控制前相比降幅显著。按时完工次数占总次数之比,由控制前的83%提高到91%,按时完工率上升明显。仿真实验有效验证了此风险控制方法和仿真模型的可行性和有效性,对水面舰船坞修进度风险管理具有很好的指导意义。

图6 风险控制前后仿真结果对比
4 结束语
在舰船坞修项目管理中,合理对维修进度风险评估是项目成功的关键。本文在舰船坞修项目分解的基础上,通过故障模式与影响分析(FMEA)方法建立了维修进程风险识别表,共识别出20种影响进度风险的因素。通过对工序与风险之间逻辑关系的研究,运用Anylogic软件建立了舰船坞修进度风险评估模型。仿真结果得出了不同风险因素对项目总工期变化的影响,从而得到了风险因素重要性大小,据此提出一种差异化的风险控制策略。最后通过仿真实验前后对比,验证了模型的可靠性。本文建立的仿真模型具有一定的扩展性和普遍性,对其他相似的工程项目进度风险控制和管理具有一定的参考价值。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
昆钢科技(2022年2期)2022-07-08
舰船科学技术(2022年10期)2022-06-17
昆钢科技(2021年1期)2021-04-13
舰船科学技术(2021年12期)2021-03-29
建材发展导向(2019年10期)2019-08-24
船舶标准化工程师(2019年4期)2019-07-24
兵器知识(2018年4期)2018-04-18
科技视界(2016年24期)2016-10-11
兵器知识(2014年12期)2014-12-10