
智能车辆动态避障轨迹预测与跟踪控制
2022-12-29 06:06赵海鹏孙小松
汽车实用技术 2022年23期
赵海鹏,孙小松,段 敏
智能车辆动态避障轨迹预测与跟踪控制
赵海鹏1,孙小松*2,段 敏2
(1.辽宁理工职业大学 汽车学院,辽宁 锦州 121007;2.辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
为解决智能车辆动态避障路径预测及跟踪问题,文章对动态障碍进行建模并基于三角形面积法引入避障约束,设计代价函数以满足最优预测轨迹输出,同时设计引入侧翻约束的非线性模型预测控制器进行在线最优路径跟踪。通过Matlab进行基于结构化道路下的避障轨迹预测与跟踪控制仿真,仿真试验得出控制车辆在满足避障约束等条件下,可以实现换道超车并到达指定目标点,且加速度变化率(jerk)值小舒适性好。试验结果表明,预测轨迹理想、控制器准确性高且具有一定的鲁棒性。
智能车辆;非线性模型预测控制器;动态避障;轨迹预测;跟踪控制
到目前为止,对于预期应用程序中的避障方法主要包括基于虚拟潜力和导航功能的方法[1]、基于图搜索方法[2]、基于优化的方法[3]。然而,前两种方法在目前的公路应用中无法达到动力安全要求,第三种方法有无法承受计算负担而引起非平滑导航命令的风险。而基于优化的方法在依赖于严格的数学公式的同时对车辆动态安全约束进行系统处理,其既可以生成平滑的轨迹,又可以保证车辆的安全性。因此,优化方法最适合当下的应用。文献[4-5]成功的将模型预测控制(Model Predictive Control, MPC)技术应用于车辆避障研究,但这些研究局限于遵循时刻的交通规则、无动态障碍物进入参考路径的条件下。文献[6]使用非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)技术来避免非结构环境中的静止障碍物。然而,这些研究在问题的制定中将纵向速度始终考虑为恒定的,这样不仅限制了运动性能,而且只能将性能限制在较小的障碍上。
本研究考虑了在结构化环境下对动态障碍物的处理并将动态障碍信息融合到NMPC问题中实现实时避障,同时增加侧翻约束保持车辆的安全性。
1 智能驾驶车辆与动态障碍建模
1.1 汽车运动学模型
为确保基于结构化道路下对车辆运动能力的准确描述,假设路面平坦、车轮与路面保持良好滚动接触,忽略空气阻力、地面侧向摩擦力与悬架结构的影响,应用双自由度运动学模型对预测轨迹进行优化设计,如图1所示。

图1 运动学模型
惯性坐标系下系统动态方程约束为

式中,()为前轮偏转角速度;()为沿轴的加速度;L为车宽;L为轴间距。
为使状态、控制变量始终处于解空间某流形限制内,设置其允许作用区间为

式中,t≥0;max与max为线加速度、前轮转角速度的最大幅值,max取值为1;max为低速场景下车速上限;max为最大前轮转角。
1.2 车辆动力学模型


假设轮胎工作在线性区域,且同轴左右轮胎侧偏角相同,则
定义前后轮侧偏角为


1.3 动态障碍动力学模型
建立动态障碍动力学模型为

式中,obs为行驶速度,obs为航向角。
将车辆模型与障碍模型整合为NMPC控制器系统模型并进行欧拉离散积分得

式中,为二者状态量集合;为控制量。
2 预测轨迹规划
2.1 选择参考点
取目标点同一惯性坐标系下同值不同值的点做为参考轨迹点。为避免车辆避障后出现回头形式的情况发生,将目标点纳入参考轨迹点寻找中。除此之外,取穿过车身模型后轴中心点平行于、轴交于参考轨迹且离目标终点距离最近的点作为真正的起始参考轨迹点。
2.2 碰撞约束条件
由于二维平面中存在的控制主车与obs个矩形障碍物之间的碰撞必源于二者的顶点处。因此,可限制每一时刻下双方顶点皆处于彼此的外部,则可避免碰撞。采用三角形面积法对约束建模,借此描述点=(,)处于某一矩形1~4外部。如图2所示,若与矩形障碍物每相邻两个顶点间的三角形面积和大于矩形障碍物,则处于其外部,反之处于内部,建立外部约束为

将式(10)记为(,1,2,3,4),据此建立第个障碍物每一时刻障碍物顶点V1~V4与车身顶点()~()的避碰约束条件

其中,∈[0,t], t为终止时刻;=1,...,obs。

图2 描述点P在矩形外的三角形面积法
2.3 预测轨迹生成
为得出众多硬约束条件下的最优轨迹输出,以积分与末值型性能指标表征整个时域上指标累计程度、终止时刻车辆运动状态的最小化需求,设计如下代价函数:

(11)

代价函数中,1,2,3,4,5为各性能指标对应的权重系数;t为终止时刻;首项为车辆尽快抵近各航路点而设置;(x,y)为障碍物的几何中心点;k>0决定了车辆远离障碍物的期待程度;三、四项积分指标决定了预测轨迹的平滑程度;末项为最终预测的车辆位置应到达目标点位置而设置,0为车辆当前位置到目标位置的距离,d为车辆最终位置到目标位置的距离。
该最优解问题可通过最优控制策略搜索工具(Optimal Control Decision-searching Tool, OCDT)+积分概率度量(Integral Probability Metric, IPM)的数值优化法求解。
3 路径跟踪控制
3.1 侧翻安全约束
为防止车轮出现脱离地面的情况,对每个车轮所承受的垂直载荷施加始终大于等于1 100 N[9]的约束并对车辆的簧载、非簧载质量进行估算,得出前、后轴静态垂直载荷


假设仅考虑车辆纵向的轴荷转移,进一步对各轮动态下的垂直载荷约束为






其中,权重转移系数λ,x,λ,yr,λ,yf可由式(2)计算推导。
3.2 目标函数设计
令状态量跟踪优化后预测轨迹的线路点,基于NMPC对移动避障跟踪控制器进行设计,目标函数为


式中,为较小正数;,为权重矩阵;前两项表征惩罚车辆预测与参考下的状态误差、控制变化率以降低控制工作量;当控制车辆各轮胎垂向载荷接近约束量时,第三项最小化预测轨迹横向误差与惩罚成本函数的同时避免了不必要的安全约束操作;最后一项表征避碰道路边界,令其约束始终不小于1;,的取值计算源于文献[9]。
使用多重打靶法将NMPC问题转换为神经语言程序学(Neuro-Linguistic Programming, NLP)问题后由MATLAB环境下的CasADI求解、开发。
4 仿真试验
4.1 仿真工况与主要参数
给无人车初始状态(未处于参考轨迹上),使其在一段长为120 m的结构化道路下躲避前方三个不同车速行驶的障碍车辆后以1.5 m/s的车速到达目标点,以试验控制效果。主要控制参数、整车主要参数如表1、表2所示。

表1 主要控制参数

表2 整车主要参数IZ/(kg·m2)
4.2 仿真结果分析
图3为不同时刻的避障效果示意图,可清晰的看到控制车辆状态预测与所有移动障碍状态预测保持最小指定距离,即在满足避障约束等条件下可以实现换道超车并到达指定目标点。

图3(a) 躲避一障碍

图3 (c) 到达目标点

图3 (d) 图例解析
图4—图5反映了车辆跟踪预测规划轨迹过程中横摆角与质心侧偏角度的变化,可以看出,横摆角波动始终控制在30°以内,较为稳定,质心侧偏角最值在15°左右,体现了该控制过程中的横摆稳性。

图4 横摆角

图5 质心侧偏角

图6 纵向车速
图6—图7反映了车辆为应对避障超车做出的纵向速度与加速度的变化。仿真车辆在不同位置接近障碍物区域时车速皆有所降低,其中车速最低降到了1.3 m/s,在找到无障碍物区域时加速,以最优预测轨迹到达目标点。除此之外,为使车辆在加速超过障碍物后以1.1 m/s的速度抵达目标点,纵向加速度在110 m左右出现了大幅度的负增长。这也导致了图8中在100 m前舒适性保持良好的情况后,Jerk值波动较大。

图7 纵向加速度

图8 Jerk变化

图9 前轮转角
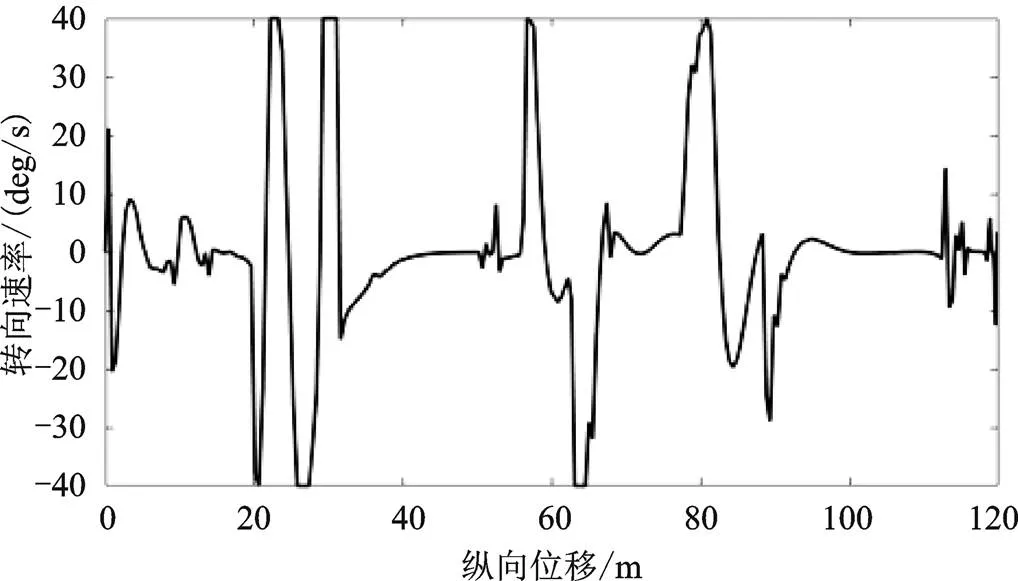
图10 转向速率
图9—图10反映了车辆在跟踪过程中前轮转角与控制量(转向速率)的变化,其中前轮转角的波动始终控制在30º的约束范围内。
5 结论
本文以汽车运动学模型与双自由度模型为路径预测与跟踪模型对控制器进行设计,基于结构化道路下引入动态障碍与侧翻约束的同时通过设计最优预测路径的代价函数与NMPC跟踪控制器。随后通过Matlab仿真试验结果揭示设计的可行性。得出如下结论:
(1)本文所设计的控制器满足车辆在换道超车过程中的约束条件。
(2)基于最优轨迹预测过程中,预测轨迹较为精确,可满足车辆安全到达目标点。
(3)基于侧翻约束下的NMPC跟踪控制器具有较好的稳定性,满足横摆稳定性要求,且在尽可能保证乘客舒适性的前提下完成跟踪任务。
[1] SHIMODA S,KURODA Y,IAGNEMMA K.High-speed Navigation of Unmanned Ground Vehicles on Uneven terrain Using Potential Fields[J].Robotica,2007,25(4): 84-92.
[2] KARAMAN S.Emilio Frazzoli.Sampling-based Motion Planning with Deterministicμ-Calculus Specifications [C].//Proceedings of Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference(6).北京:中国自动化学会,2009:8.
[3] A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles[J].Journal of Robotics & Machine Learning,2017:158-162.
[4] NILSSON J, FALCONE P, MOHAMMAD A, et al. Receding Horizon Maneuver Generation for Auto- mated Highway Driving[J].Control Engineering Practice, 2015:41.
[5] Shared Steering Control Using Safe Envelopes for Obstacle Avoidance and Vehicle Stability[J].Journal of Robotics & Machine Learning,2016:134-151.
[6] Combined Speed and Steering Control in High-Speed Autonomous Ground Vehicles for Obstacle Avoidance Using Model Predictive Control[J].Journal of Trans- portation,2017: 54-65.
[7] Sprung.Unsprung Mass Properties Determination wi- thout Vehicle Disassembly[J].SAE Transactions,1996: 105.
[8] KLOMP M,BRUZELIUS F,NIELSEN J,et al. Advan- ces in Dynamics of Vehicles on Roads and Tracks[M]. Springer:2020.
[9] LIU J C ,JAYAKUMAR P,JEFFREY L,et al. A Non- linear Model Predictive Control Formulation for Obstacle Avoidance in High-speed Autonomous Gro- und Vehicles in Unstructured Environments[J].Vehi- cle System Dynamics,2018,56(6):75-78.
[10] WANG H R,WANG Q D,CHEN W W,et al.Path Tracking Based on Model Predictive Control with Variable Predictive Horizon[J].Transactions of the Institute of Measurement and Control,2021,43(12): 34-39.
[11] LI M Y,ZHOU P,HE X M,et,al.Parallel Parking Path Planning and Tracking Control Based on Adaptive Algorithms[J].International Journal of Automotive Technology,2021,22(4):64-69.
Intelligent Vehicle Dynamic Obstacle Avoidance Trajectory Prediction and Tracking Control
ZHAO Haipeng1, SUN Xiaosong*2, DUAN Min2
( 1.College of Automotive Engineering, Liaoning Vocational University of Technology,Jinzhou 121007, China; 2.College of Automotive Engineering and Transportation Engineering,Liaoning University of Technology, Jinzhou 121001, China )
To solve the problem of intelligent vehicle dynamic obstacle avoidance path prediction and tracking, dynamic obstacles are modeled and obstacle avoidance constraints are introduced based on the triangle area method, cost functions are designed to meet the optimal predicted trajectory output, and a nonlinear model predictive controller (NMPC) that introduces rollover constraints is designed to track the online optimal path.The Matlab performs the obstacle avoidance trajectory prediction and tracking control simulation under the structured road. The simulation test shows that the control vehicle can change lanes and reach the designated target point when meeting the obstacle avoidance constraint, and the jerk value is small and has good comfort. The test results show that the predicted trajectory is ideal, the controller has high accuracy and certain robustness.
Intelligent vehicle; NMPC; Dynamic obstacle avoidance; Trajectory prediction; Tracking control
U461
A
1671-7988(2022)23-39-06
U461
A
1671-7988(2022)23-39-06
10.16638/j.cnki.1671-7988.2022.023.008
赵海鹏(1987—),男,硕士,讲师,研究方向为新能源汽车,E-mail:2990534806@qq.com。
孙小松(1998—),男,硕士研究生,研究方向为车辆系统动力学及控制,E-mail:1443270358@qq.com。
辽宁省教育厅科技大平台项目(JP2017006)。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
小学阅读指南·低年级版(2017年1期)2017-03-13
北京航空航天大学学报(2016年7期)2016-11-16
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21
