时滞反馈下分数阶Rayleigh系统的稳定性分析
2023-01-31 08:15陈聚峰申永军李向红王晓娜
振动与冲击 2023年2期
陈聚峰, 申永军, 张 静, 李向红, 王晓娜
(1. 石家庄铁道大学 省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043; 2. 石家庄铁道大学 数理系,石家庄 050043; 3. 石家庄铁道大学 机械工程学院,石家庄 050043; 4. 石家庄邮电职业技术学院 基础部,石家庄 050021; 5. 河北轨道运输职业技术学院 机电工程系,石家庄 050021)
自1927年荷兰物理学家van der Pol等[1]在描述真空管电路时建立了van der Pol方程后,van der Pol型振子作为一种典型的含有非线性阻尼的自激振动系统,得到了学者们的广泛关注和深入研究[2-5]。Rayleigh振子属于van der Pol型振子,并且具有相似的动力学特性,它与van der Pol振子的区别是:随着电压的增加,van der Pol振子的频率增加,而Rayleigh振子的振幅增加。在不同领域,Rayleigh振子可以用来描述许多自激振荡系统。比如,在土木工程中Rayleigh振子可用于描述安装在非线性阻尼弹性支承上的梁的模态动力学以及梁在风激励下的动力学模型[6-7]。受驱动的Rayleigh振子可以用来描述地震的动力学[8]。通过试验和理论研究表明,Rayleigh振子还可用于驱动柔性机械臂[9-10]。
分数阶微积分是应用数学的一个重要分支,它是将整数阶微积分推广至任意实数阶甚至复数阶的微积分理论[11-13]。现实世界中许多物体运动都可以用分数阶模型来识别和描述,与整数阶模型相比,其优点是:分数阶导数在描述各种过程的记忆和遗传特性方面具有优异的性能。近年来,随着计算机技术的加速发展,分数阶微积分在诸如物理、工程、经济学、生物学、材料科学等各个领域的应用受到了广泛的关注[14-21]。同时,许多不同类型的分数阶van der Pol/Rayleigh振子也越来越受到关注[22-25]。例如:Shen等[26]利用平均法研究了含有分数阶导数的van der Pol 振子发生主共振的动力学特性;Zhang等[27-28]利用Melnikov方法研究了分数阶Rayleigh-Duffing的混沌及同步;Zhang等[29]利用随机平均法研究了在高斯白噪声激励下含有分数阶导数的Duffing-Rayleigh系统的响应;Xiao等[30]研究了状态反馈下一类分数阶van der Pol系统的稳定性和Hopf分岔控制。另外,在控制系统中不可避免地存在时滞现象,一方面,时滞的存在往往会导致系统失稳以及控制性能下降;另一方面,人们可以利用时滞进行控制设计来改善系统的稳定性[31-33]。目前,对于时滞反馈下分数阶Rayleigh系统的稳定性方面的研究还很少。因此,本文以时滞作为分岔参数,讨论一类分数阶Rayleigh系统在时滞速度反馈下的稳定性及分岔问题。
1 时滞反馈下分数阶Rayleigh系统的稳定性分析
考虑在速度时滞反馈控制下,同阶次的分数阶Rayleigh系统
(1)
式中: 0
式中,Γ(y)为Gamma函数,且Γ(y+1)=yΓ(y)。
式(1)有唯一平衡点(x1,x2)=(0,0),相应的线性化系统为
(2)
特征方程为
(3)
利用Tavazoei等的方法,我们可得:
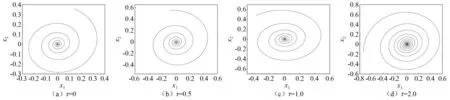
定理1当τ=0时,对每一固定的q,式(1)的平衡点(0,0)是渐近稳定的充要条件为0 (4) 可见,系统参数a的临界值ac不仅与反馈增益k有关,还与分数阶阶次q有关。随着q的减小,k的增大,系统平衡点渐近稳定的参数a的范围会增大。 接下来,将讨论对任意的τ>0,特征方程det[Δ(s)]=0没有纯虚根的条件。 (5) 分离实部和虚部,可得 A1cosωτ+A2sinωτ=δ1 (6) A2cosωτ-A1sinωτ=δ2 (7) 其中, (8) (9) (10) 式(6)和式(7)两边平方相加后,可得 ω4q+b3ω3q+b2ω2q+b1ωq+1=0 (11) 其中, 令ωq=z,则式(11)变为 z4+b3z3+b2z2+b1z+1=0 (12) 记H(z)=z4+b3z3+b2z2+b1z+1,则有 H′(z)=4z3+3b3z2+2b2z+b1 令 4z3+3b3z2+2b2z+b1=0 (13) y3+p1y+q1=0 (14) 由Cardano公式,可得式(14)的根为 引理1[34]若Δ≥0,则式(12)有正根当且仅当z1>0及H(z1)<0;若Δ<0,则式(12)有正根当且仅当至少存在一个z*∈{z1,z2,z3},使z*>0及H(z*)≤0。 令 (15) 因此,可定义 (16) 引理2考虑如下的指数多项式 引理3假定0 (ⅰ) 若下列两个条件之一成立: (a) Δ≥0,z1>0且H(z1)<0; (b) Δ<0,且存在一个z*∈{z1,z2,z3},使z*>0和H(z*)≤0。 则当τ∈[0,τ0)时,式(3)的所有根都具有负实部。 (ⅱ) 若(ⅰ)中两个条件都不满足,则对于任意的τ≥0,式(3)的所有根都具有负实部。 证明当τ=0,由定理1可知,当0 令 s(τ)=α(τ)+iω(τ) (17) 是式(3)满足α(τ0)=0,ω(τ0)=ω0的根。 证明式(3)两边关于τ求导,得 (18) 于是, (19) 因此,当τ=τ0,s=iω0,式(19)变为 (20) 其中, 所以, 因此, 从而结论成立。 由引理1、引理3及引理4,我们可得: 定理2令ω0,z0,τ0及s(τ)是由式(16)和式(17)所定义,假定0 (ⅰ) 若下面两个条件: (a) Δ≥0,z1>0且H(z1)<0; (b) Δ<0,且存在一个z*∈{z1,z2,z3},使z*>0和H(z*)≤0。 都不满足,则对于任意的τ≥0,式(1)的零解是渐近稳定的。 (ⅱ) 若满足(ⅰ)中条件(a)和条件(b)之一,则当τ∈[0,τ0)时,式(1)的零解是渐近稳定的。 本章将选取三组系统参数,分别对分数阶Rayleigh系统进行数值仿真,以验证理论结果的正确性。这里我们采用G-L定义法对其数值解进行模拟。 取时滞τ=0.48<τ0,则式(1)的零解是渐近稳定的,如图1(a)和图1(b)所示;再取时滞τ=0.55>τ0,则式(1)的零解是不稳定的,出现了周期解,如图1(c)和图1(d)所示;最后取时滞τ=0.80>τ2>τ0,则式(1)的零解仍是不稳定的,系统存在周期解,如图1(e)和图1(f)所示。因此,式(1)在τ=τ0处发生Hopf分岔。这与定理2的结论完全相符。 图1 当q=0.9,k=0.6时,式(1)的时间历程图和相图Fig.1 Time histories and phase diagrams of Eq.(1) with q=0.9 and k=0.6 取时滞τ=0.275<τ0,则式(1)的零解是渐近稳定的,如图2(a)和图2(b)所示;再取时滞τ=0.315>τ0,则式(1)的零解是不稳定的,出现了周期解,如图2(c)和图2(d)所示;最后取时滞τ=0.600>τ2>τ0,则式(1)的零解仍是不稳定的,系统存在周期解,如图2(e)和图2(f)所示。因此,式(1)在τ=τ0处发生Hopf分岔。 (ⅲ) 选取q=0.9,k=0.05,则由式(4)可得ac=0.362 9。取a=0.2 图3 当q=0.9,k=0.05时,式(1)的相图Fig.3 Phase diagrams of Eq.(1) with q=0.9 and k=0.05 本文主要对速度时滞反馈下分数阶Rayleigh系统的稳定性和Hopf分岔条件进行分析。以时滞τ作为分岔参数,当τ=0时,分数阶Rayleigh系统具有线性反馈,得到了平衡点渐近稳定的充要条件,它不仅与反馈增益k有关,还与分数阶阶次q有关;当τ>0时,基于特征方程,当系统参数满足定理2中的条件,可以计算出平衡点稳定的时滞参数临界值τ0,当时滞参数小于τ0时,平衡点是稳定的,当时滞参数大于τ0时,平衡点是不稳定的;进而,得到Hopf分岔发生的条件。可见,通过调节时滞的参数值,可以控制分数阶系统的稳定性与分岔。













2 数值模拟



3 结 论
猜你喜欢
数学物理学报(2020年5期)2020-11-26数理化解题研究(2019年22期)2019-08-26自动化学报(2019年6期)2019-07-23物理学报(2019年12期)2019-06-29北方工业大学学报(2019年5期)2019-03-30烟台果树(2019年1期)2019-01-28学校教育研究(2018年4期)2018-10-21传媒评论(2018年7期)2018-09-18IT时代周刊(2015年7期)2015-11-11散文百家(2014年11期)2014-08-21