
转向减振器对车辆摆振系统动力学影响分析
2023-02-09 01:21卢剑伟
机械设计与制造 2023年1期
胡 辰,卢剑伟
(1.扬州工业职业技术学院交通工程学院,江苏扬州 225000;2.合肥工业大学机械与汽车工程学院,安徽合肥 230009)
1 引言
前轮发生摆振会影响车辆的操纵稳定性,严重时甚至会危及车辆行车安全。近年来国内外学者们针对摆振的影响因素及产生机理展开了很多研究,如文献[1−2]对车轮和地面接触的迟滞现象对车辆摆振的影响做了研究;文献[3]通过建立分段干摩擦模型,对干摩擦这一因素对车辆摆振的影响情况做了分析。文献[4]从转向系与前悬架耦合的角度,对车辆动力学特性进行了研究;本团队也围绕转向系传动机构以及操纵机构运动副间隙等非线性因素对摆振的影响做了研究[5−6],这些研究为这里考虑转向减震器对摆振系统的影响提供了理论基础。同时这些研究对于车辆在设计初期通过结构参数优化将摆振控制在可控范围提供了思路。但是对于在役车辆,由于磨损、维修装配误差等因素,车辆的摆振情况随着车辆在役时间的增加日益凸显。这类车辆摆振情况产生因素多且情况各异,很难通过上述结构参数重新调整来得到改善。有文献表明,对于这种类型车辆,加装转向减振器是较为有效的方法[7−9],但是转向减振器对摆振的影响还缺少理论论证,加装转向减振器后的车轮的摆角运动响应特性也未有相关的研究分析。
这里建立了含有转向减振器的摆振系统动力学模型,并结合发生摆振的两种常见类型:自激型摆振以及强迫型摆振,分析了不同车速下车轮摆角响应特性及其随车速的分岔特性。
2 考虑转向减振器的摆振模型建立
通常转向减振器分别固定安装在转向横拉杆和车架之间,车架端可以认为是固定端。由此建立含有转向减振器,并包括右前轮转角θ1、左前轮转角θ2及前桥侧摆角ϕ的三个自由度的模型,如图1所示。
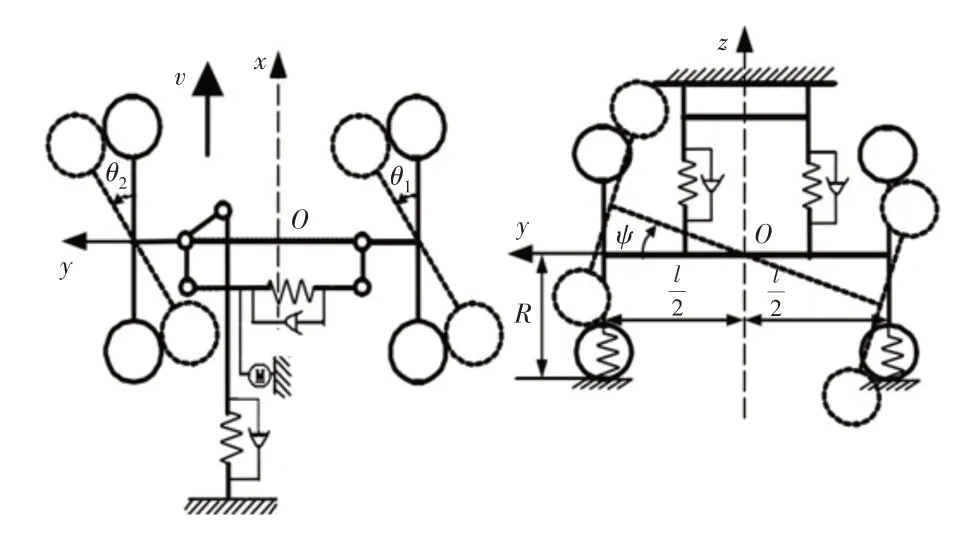
图1 考虑转向减振器的摆振模型Fig.1 Diagram of Shimmy Model with Steering Damper
由于本模型重点研究转向减振器对车辆摆振的动力学影响,模型中忽略了运动副间隙、干摩擦以及车轮滑移率、弹性变形等因素对系统的影响。
2.1 轮胎模型
轮胎的模型构建对于后续运算有较大的影响,参考相关文献,运用魔术公示来描述:

式中:T1、T2—左右轮胎的侧偏力;α1,α2—左右车轮的侧偏角,其他参数都是常数,由实验可以拟合得到。
参照相关文献[8]运用一阶近似张线原理,构建关于α1,α2的车轮滚动方程如下:
式中:σ—轮胎松弛长度;v—车辆行驶速度。
2.2 考虑转向减振器的自激振动模型
这里主要分析转向减振器的阻尼这一参数对车辆摆振响应的影响。为便于计算,将转向减振器阻尼做一个换算,换算为绕车轮主销的阻尼cJ并展开后续分析。
根据魔术公示建立的车轮模型,结合考虑转向减振器的车辆摆振模型,可建立车辆摆振动力学方程,由式(3)~式(5)描述:

式中:I1、I2—车轮绕主销以及绕自身轴线的转动惯量;k1、c1—横拉杆的刚度和阻尼(换算到主销);k2、c2—直拉杆刚度和阻尼(换算到主销);;R—轮胎的滚动半径;L—轮距;f—滚动阻力系数;l—主销延长线与路面交汇处至车轮中心面的长度;γ—主销后倾角;β—轮胎拖距;b—主销到车轮中心面的距离;a—轮胎印迹半长度;

式中:I3—前桥绕自身纵轴线的侧摆惯量;k3—悬架当量角刚度(换算到前桥侧摆中心);k4、k5—轮胎的侧向刚度和垂直刚度;c3—换算到前桥侧摆中心悬架当量角阻尼;c4—车轮绕主销的当量阻尼;
2.3 考虑转向减振器的强迫振动模型
由于车轮自激振动和强迫振动的机理是不同的,其运动形式和规律也有着很大的差异,因此有必要对强迫振动下的摆振情况做分析。这里以车轮动不平衡这一因素作为强迫振动的外部激励,并假定右前轮车轮质心偏移产生了周期性的偏心激励。构建的车轮不平衡示意图,如图2所示。

图2 车轮质心偏移产生的动不平衡Fig.2 Schematic Diagram of Dynamic Unbalance on the Wheel
参考相关文献,车轮偏心引起的离心力作用在车轮上,由此产生的周期性的回正力矩是影响车辆摆振的最重要的因素。
由此可建立装有转向减振器的右轮动不平衡激励下的摆振系统动力学微分方程,可由如式(6)以及前文式(4)~式(5)来描述:
式中:Td—动不平衡激励下形成的周期性回正力矩,可由下式描述:

式中:m0—偏心质量;e—偏心距;ω—车轮转动圆频率;b—主销到车轮中心面的距离;ϕ—偏心力的初始相位角。
3 对自激型摆振的影响分析
由于左右车轮存在转向梯形的约束,其摆振情况有着内在相关性,因此这里后续仿真仅针对右轮做分析。本文用于运算的车辆参数参考文献[10],自激振动计算中设定左前轮遇到外部扰动,车轮绕主销产生0.01rad的初始角速度。应用MATLAB 软件,通过仿真分析获得车辆在自激振动状况下,转向减振器在(0~8)N·m·s/rad 之间的右轮摆角随车速的关系,如图3 所示。从不同的转向减振器阻尼的车辆在相同车速下摆振的幅值比较可以知道,随着转向减振器阻尼的增加摆振幅值有所减小,适当的阻尼参数可以将车轮摆振的幅值控制到安全范围内。
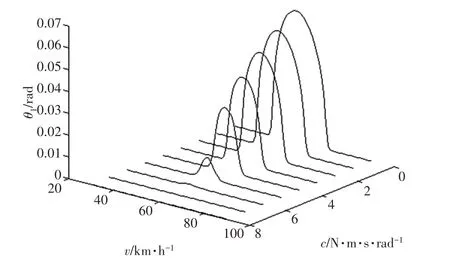
图3 不同阻尼条件下的右轮摆振Fig.3 Characteristics of Right Wheel with Different Damping
为进一步研究转向减振器对自激型车辆摆振的影响,下面分别对转向减振器加装前后右轮摆角响应情况做分析。仿真分析车辆行驶速度为55km/h时,无减振器的右轮摆角响应,如图4所示。加装有减振器的右轮摆角响应,如图5所示。其中,(a)为时间历程、(b)为功率谱、(c)为庞加莱截面、(d)为相图。
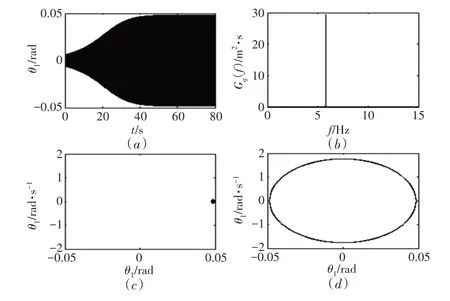
图4 无转向减振器的响应情况(v=55km/h)Fig.4 Characteristics of Left Wheel with Different Damping(v=55km/h)
从图4、图5可看出,自激振动状况下转向减振器的引入并未改变车轮摆振的运动特性,转向减振器对于摆振的影响主要体现在左右车轮摆振的幅值上,转向减振器的阻尼越大,摆振的抑制效果越明显。
4 对强迫型摆振的影响分析
仿真车辆车轮的质量m0为30kg,假定偏心初始相位角ϕ=0。为全面分析转向减振器对不同激励强度的强迫振动的影响,这里分别以较小激励(偏心距e为0.4mm)和较大激励(偏心距e为4mm)为例,应用MATLAB进行数值求解,分析转向减振器对车轮摆角的动力学响应的影响。从上文的分析可知,左右轮的影响有一定关联性,这里主要对右轮进行分析。通过对比未装转向减振器的分叉特性和装有减振器的分叉特性,如图6、图7所示。可知安装转向减振器后车轮的摆角有较大程度的减小。

图6 无转向减振器的车轮摆角分岔图(e=0.4mm)Fig.6 Bifurcation Characteristics without Steering Damper(e=0.4mm)
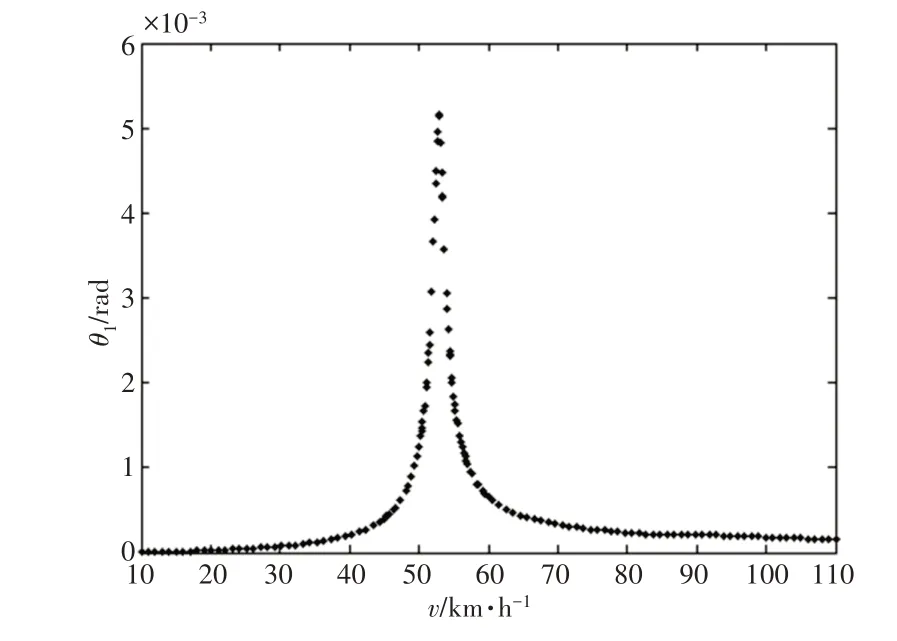
图7 装有转向减振器的车轮摆角分岔图(e=0.4mm)Fig.7 Bifurcation Characteristics with Steering Damper(e=0.4mm)
另一方面从车轮摆角分叉图6 可知,即使在外部激励较小(车轮偏心0.4mm)的情况下,车轮运动已经不是单周期激励,但是图7所示的分叉特性显示是周期激励。这说明对于强迫振动而言,减振器的引入可能影响了摆振的运动特性。为更好地考察转向减振器对车轮摆振响应的影响,仿真计算车速为55km/h下车轮摆振的时间历程(a)、功率谱(b)、庞加莱截面(c)和相图(d),得到无转向减振器的右轮响应特性和安装后的右轮响应特性,如图8、图9所示。
从无转向减振器的右轮摆角响应图8可以看出,不同于无外界激励时的单周期运动状态,偏心距为0.4mm的动不平衡外部激励下,在车辆速度达到55km/h 时车轮运动状态为拟周期状态。而引入转向减振器的右轮摆角响应图9可以看出此时为单周期运动。综合分叉图和车轮摆振响应分析可知,减振器的引入不仅可以降低摆振的幅值,在某些情况下摆振运动形态也变得简单了。
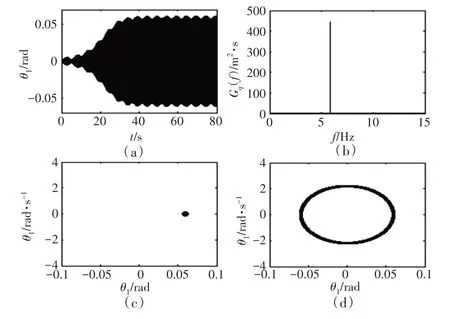
图8 无转向减振器的响应情况(e=0.4mm)Fig.8 Dynamic Response without Steering Damper(e=0.4mm)

图9 安装减振器的响应情况(e=0.4mm)Fig.9 Dynamic Response with Steering Damper(e=0.4mm)
为了更全面地考察转向减振器引入对强迫摆振的影响,下面对外部激励较大(偏心距为4mm)的情况进行分析,如图10所示。

图10 无转向减振器的车轮摆角分岔图(e=4mm)Fig.10 Bifurcation Characteristics without Steering Damper(e=4mm)
无减振器的车轮摆角分岔图,如图10所示。装有减振器的车轮摆角分岔图,如图11所示。对比两图可以看出,即使外部激励较大摆振情况比较恶劣的情况下,通过合理地选取减振器阻尼也能很好地抑制车辆的摆振情况。

图11 装有转向减振器的车轮摆角分岔图(e=4mm)Fig.11 Bifurcation Characteristics with Steering Damper(e=4mm)
同样的仿真计算车速为55km/h下车轮摆振的时间历程(a)、功率谱(b)、庞加莱截面(c)和相图(d),得到无转向减振器的右轮运动特性和装有转向减振器的右轮运动特性,如图12、图13所示。

图12 无转向减振器的响应情况(e=4mm)Fig.12 Dynamic Response without Steering Damper(e=4mm)

图13 有转向减振器的响应情况(e=4mm)Fig.13 Dynamic Response with Steering Damper(e=4mm)
从图12可看出,当车轮动不平衡激励比较大时,在一定车速下,系统自身产生的振动与外部激励振动共同作用而产生拍振,使得车辆摆振幅度呈现周期性变化。但从图13可以知,在安装转向减振器后,右轮振动形态又呈现出单周期状态。由此可见,在外部激励较大,车轮运动状态较为恶劣的情况下,转向减振器的引入也可以较好地改善车轮的运动状态。
5 结论
(1)转向减振器的阻尼对外部扰动产生的自激振动以及对由外部激励产生的强迫振动均有较为显著的影响,相同车速下随着减振器阻尼的增加,车轮摆动幅度会有所减弱。
(2)无转向减振器的车辆在车轮动不平衡激励下,车辆会出现拟周期和拍振等较为复杂的运动状态。适当阻尼的转向减振器会改变这种运动状态,呈现较为简单的单周期运动形式。
(3)对于在役车辆而言,加装转向减振器可以作为车辆摆振的控制的有效方式,但是应当根据摆振情况选取合适的减振器阻尼。
猜你喜欢
军民两用技术与产品(2021年1期)2021-07-28
汽车工程(2021年5期)2021-06-09
铁道通信信号(2020年6期)2020-09-21
港口装卸(2020年3期)2020-06-30
汽车实用技术(2019年16期)2019-09-11
快乐语文(2018年7期)2018-05-25
汽车维护与修理(2015年10期)2015-12-12
小说月刊(2015年9期)2015-04-23
人生十六七(2015年5期)2015-02-28
汽车科技(2014年6期)2014-03-11
