战斗机-无人机编组协同系统需求捕获与验证
2023-02-10 12:29史文卿王海峰陈海昕
系统工程与电子技术 2023年1期
史文卿, 王海峰, 陈海昕
(1. 清华大学航天航空学院, 北京 100089;2. 中国航空工业集团公司成都飞机设计研究所, 四川 成都 610041)
0 引 言
近年来,战斗机的感知、规划、决策、行动及综合管理能力越来越高,其体系定位正在由战术活动“端点”向作战行动“节点”演进。而无人机承担持久、枯燥、危险任务的能力越来越强,其战场角色正在由“支援”向“主战”演进。在无人装备主战化、主战装备智能化、智能装备协同化的大趋势下,将战斗机和无人机作战力量协同运用[1],创新作战样式,实现优势互补、互促增效,已成为必然需求。
将多架战斗机和无人机编配形成特定战术编组,通过联合规划、信息共享、共同认知、人机交互、任务综合、资源统筹、行动协调等来实施共同的作战任务,称为战斗机-无人机编组协同(fighter-drone teaming, FDT),是一种能力涌现性强、效能收益高的协同运用形态[2]。FDT作为有人-无人编组协同(manned-unmanned teaming,MUM-T)[3]理念的重要体现,已成为各国空中作战能力建设的热点[4],被列入一系列发展规划[5-6]以加紧研发。
与传统对象不同,编组协同面临人员、信息、物理、智能的综合一体化,航空装备工程总体首先要解决此类跨装备复杂系统[7]的需求捕获与验证问题[8]。战斗机协同无人机实施高动态、博弈性的空中作战,其工程研发要从聚焦单型单架飞机扩展到横跨多型多架飞机,技术实现需协调有人装备和无人装备的特征性差异,系统运行需满足地空之间、飞机之间、人机之间的动态、高效交互[9]。工程总体必须结合编组协同作战运用和技术实现进行概念性分析,定义任务活动、要素构成、角色权责、功能逻辑、时空运动及度量指标,并在早期完成合理性验证,从而有效指导后续的系统设计和实现。
目前,FDT系统需求捕获与验证方法都没有先例和经验可循,亟需正向探索和实践。新兴的基于模型的系统工程(model-based systems engineering, MBSE)[10]为此提供了新的工作范式。然而,实践中采用现有的一些通用MBSE方法来应对编组协同系统,建模环节多,耦合程度高,流程交织繁杂,多专业联合工作难度大,需求捕获与验证效率难以满足工程总体的实际需要。为此,本文在一般的MBSE方法基础上,提出了适用于FDT系统需求捕获与验证的策略、流程和具体方法,并以典型“二带二”对地FDT为例,进行了应用检验。
1 FDT
1.1 系统特征
FDT作为一种内聚式能力生成模式,致力于发挥系统涌现性来获得战斗机和无人机单独运作所不具备的作战效能。例如,洛·马公司的Lummus[11]研究了F-22战斗机与无人机协同遂行对敌防空压制任务,认为通过“后位战斗机实施支援干扰并指挥前位无人机感知威胁和投射武器”的协同方式,相比独立使用二者,可使发现和消除敌方防空威胁的用时大幅缩短。
基于此,各国新研或改进的战斗机、无人机日益强调统筹实现协同能力,并加快技术验证。2015年,美国提出无人“忠诚僚机”概念[12],使用AV-8B战斗机与UTAP-22无人机开展了空中编队、战术控制试飞[13]。2018年,法国、德国和西班牙在未来空战系统[14]合作研发中提出“离机载具”式协同概念,随后利用现有无人机进行了动态规划、编队重构等飞行验证。2019年,俄罗斯苏-57战斗机和“猎手-B”无人机实施了双机编队试飞[15]。澳大利亚在波音公司的支持下发展空中力量编组协同系统[16],在2021年实现了协同专用无人机MQ-28A的首飞。通过这些对象不同但目标相近的研发探索和飞行验证,FDT系统的组成、运用和技术实现正在加速成型。
FDT系统包含有人战斗机、无人机系统两类作战力量,涉及人员、装备和运用方式,在作战指挥下,由体系支撑,利用任务资源和保障条件,在战场环境中与作战对象遂行高动态博弈对抗任务,是人员-信息-物理-智能一体化的跨装备复杂系统,如图1所示。

图1 FDT系统Fig.1 FDT system
编组协同系统存在多元多变的要素关系和多域系统行为,以适应空中作战的动态性和博弈性。根据编配方式和角色权责设定,战斗机与无人机之间可以是直属操控、主从指挥或伙伴协商式的地位关系,可以实现行动配合、功能协作或元素互用级的交互深度。协同行为由地面和空中的多个异构物理实体参与,通过多种通联方式交换信息,在差异化的人类智能和人工智能的认知驱动下,按照战术运用规则和系统运行机制展开行动,存在多层的感知-判断-决策-行动(observe-orient-decide-act, OODA)循环。
编组协同系统必须实现时空运动、功能逻辑和人员操作流程的协调互洽,以达成不同战术目的下的飞行协同、任务协同和人机协同。例如,战斗机-无人机对地编组协同,根据任务需要,在多机协同突防时,以一架领机为中心来编成、保持及变换队形,降低被发现的概率[17];在攻击时,可由无人机探测照射目标,由战斗机隐蔽发射打击武器,降低飞行员的暴露风险;在无人机自主交战时,战斗机上的飞行员要对无人机的行为进行监管和授权,以防止误击误伤。
1.2 系统需求捕获与验证
对多元一体、关系多变而又必须协调互洽的FDT系统进行需求捕获与验证,是航空装备工程总体面临的新挑战。
在“V”字形系统工程流程中,系统需求捕获与验证是“左上角”阶段的重要内容[18](见图2)。其向前承接作战概念研究,通过对系统进行概念性分析,定义系统要做什么、要达到的程度和所处的条件[19],并在工程早期进行合理性验证。概念性分析完成后,将系统需求连同捕获和验证依据向后续研发主体移交,从而牵引和指导系统设计、软硬件开发实现,以及进行系统集成和系统验证。
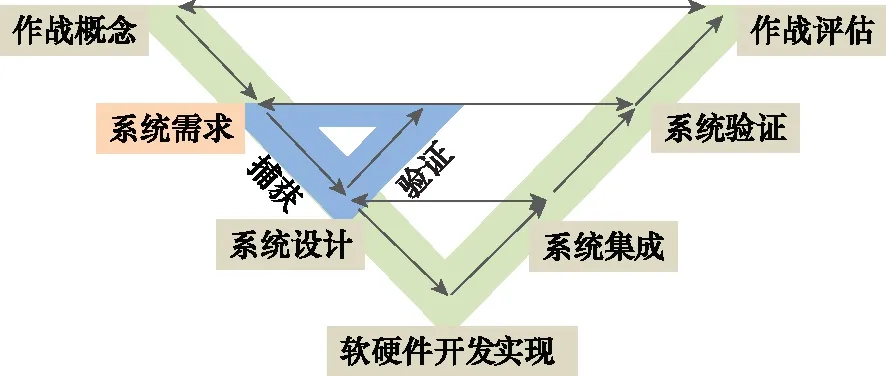
图2 系统需求捕获与验证Fig.2 System requirements elicitation and verification
采用传统的文本式、图表式分析方式进行需求捕获与验证,难以应对编组协同系统的复杂性。一方面,对系统进行需求捕获时,要从协同系统内部和界面的、静态和动态的等多个视角,对要素关系、系统行为进行综合分析和表达。另一方面,在对所捕获的需求进行验证时,要对协同任务过程中物理和信息的、时空和逻辑的、人员和装备的等多域需求进行动态关联检查。同时,目前对编组协同系统需求处于能力概念研究和具体仿真实验两端,缺乏适用于工程早期颗粒度需要的有效手段。如付昭旺等[20]面向空战提出了协同模式及能力需求,而Frey和Schulte[21]基于仿真座舱,对直升机-无人机编组协同系统中的辅助智能系统的需求进行了细节性实验研究。
因此,多视角综合分析捕获、多域关联动态验证,能够在工程早期实施的编组协同系统需求捕获和验证,必须转向MBSE。
2 基于模型的系统需求捕获与验证
2.1 一般方法
MBSE利用规范化、形式化、图形化的建模语言开展系统分析,为复杂系统需求捕获与验证提供了新的工作范式。编组协同的时空运动、功能逻辑和操作流程可使用主流系统建模语言SysML[22]的结构图、行为图等进行多视角综合分析和表达。构建贯通一致的系统模型并联合运行,能够实现物理、信息、逻辑的多域关联,对协调性和互洽性进行动态检查。
然而在国内的研发实践中,使用IBM公司Hoffmann提出的Harmony SE方法[23]和达索系统公司的MagicGrid方法[24]进行尝试,发现这些通用方法不足以高效捕获和验证编组协同系统需求。这其中的主要原因为:一是力图构建一种模型实现全部分析和验证,建模环节多,耦合程度高,特别是在多专业联合工作时难以清晰分解和并行建模,调整少量需求就要投入大量的协调精力;二是缺乏应对异构多系统、人机混合对象的具体分析步骤、建模内容、模型粒度和语义规范指导;三是单独运用SysML建模来分析和运行,并不能解决编组协同系统的时空运动与功能逻辑、操作流程的协调互洽问题。
国外针对编组协同系统积极探索适用的模型化方法。Michelson和Domercant[25]采用MBSE方法进行了编组协同功能分解,研究提出了系统自主性需求。2019年,美国空军支持通用电气公司,启动了编组协同使能架构项目[26],研究用于协同系统的建模流程、方法和工具,正是应对将MBSE应用于协同系统研发所面临的挑战。
基于此,有必要立足编组协同系统复杂性的特点和国内工程研发实际,探索基于模型的系统需求捕获与验证策略、流程及具体方法。
2.2 适用于编组协同系统的策略和流程
针对一般方法的不足,可根据编组协同系统特征,整体纳入跨装备协同要素,采取降低耦合、分层分解、建立约束规范、加入时空建模等方式,形成适用的需求捕获与验证策略。
(1) 将分析建模和验证建模分开。对复杂系统的分析过程变动性强,各专业研发人员频繁研讨迭代,需求分析模型要易于表述,便于快速修订。而验证过程的严谨性强,需求验证模型符合严格的编译语法,实现模型在环运行,通常只针对问题做少量更改。
(2) 划设可分拆的模型层次,支持多专业联合构建。编组协同涉及多要素、多领域,需要多专业研发人员共同参与、联合构建,工程级的建模要求有序的分段、分层、分步及并行构建,以利于分工实施和总体综合。
(3) 制定必要的原则、规程和语义规范来指导建模。根据编组协同特点,要对人机关系、角色配置和作业流程等进行规范,并约定有效表达协同行为的SysML用法及含义,降低建模的随意性,便于模型的理解、复用和整合。
(4) 交错式分解系统活动,由操作和交互行为来映射系统需求。从任务场景出发,按要素层次自顶向下,交错采用活动图和顺序图建模分析,分解出各要素自身要完成的操作、要素之间要进行的交互,进而分别将其映射为系统的操作性需求、交互性需求。
(5) 同步考量系统逻辑行为和时空关系。通过加入时空建模,在分析阶段,对应系统的操作和交互行为,推演分析时空关系,形成度量指标;在验证阶段,转化构建系统逻辑状态模型和时空运动模型,通过模型在环联合运行完成验证。
根据上述策略,形成基于模型的编组协同系统需求捕获与验证流程(见图3)。

图3 基于模型的FDT系统需求捕获与验证流程Fig.3 Model-based FDT system requirements elicitation and verification process
(1) 任务场景构建。承接作战概念,建立编组协同任务类型、任务流程和片段场景,划设内外部要素结构,创建各片段场景的要素实例。
(2) 系统行为分析。对编组协同人机关系、角色配置和作业流程进行约定,制定系统行为建模语义规范,分层分解系统活动、操作和交互,建立系统行为模型,进而推演时空关系,形成度量指标。
(3) 需求映射定义。基于系统的操作和交互行为及所关联的度量指标,映射定义系统需求,采取流程活动和功能聚类相结合的方式,形成系统需求清单,建立需求捕获映射矩阵。
(4) 模型在环验证。转化建立系统逻辑状态模型和时空运动模型,通过模型在环联合运行完成需求验证,建立需求验证映射矩阵。
为检验上述策略和流程并形成具体方法,以下对典型的“二带二”(由两架有人战斗机和一套一站双机的无人机系统所组成)对地作战编组协同系统进行需求捕获与验证。
3 任务场景构建
3.1 协同任务
首先,承接作战概念确定任务类型,根据目标战场实例化分为多个任务流程。随后对各任务流程沿时间轴进行分解,按照协同内容和特征,以高覆盖性和低重复性为目标,归并为一系列片段场景。进而分析确定其内外部参与要素、基本过程、前置条件、后置条件。
以“二带二”对地协同为例,确定协同广域封控等3类任务,实例化为时敏侦搜打击等6个典型任务流程,分解归并形成“召唤会合”“指控交接”“协同定位”等一系列片段场景,采用SysML用例图表达协同任务类型、任务流程和片段场景,以及实例化和分解关系,如图4所示。
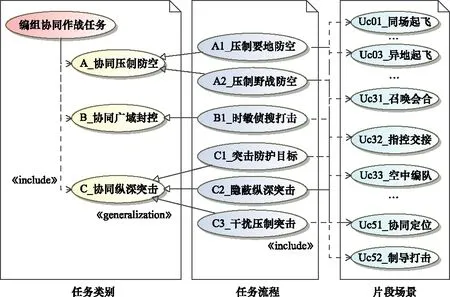
图4 FDT系统的任务类型、任务流程和片段场景Fig.4 Mission type, task process, and scenario of FDT system
3.2 协同要素
首先,归并所有片段场景的内外部参与要素,进行层次化组织,建立全局要素类别,采用SysML语言的块定义图建模。由于编组协同系统的复杂性,很难针对要素类别一次做到有效的涵盖和划分,通常要结合系统行为分析进行多轮迭代。
对于“二带二”编组协同系统:外部要素涉及上级指挥、体系支援、保障条件、友邻兵力、作战对象等;在内部要素中,作战人员和机载武器只需分解到一级,而作为研发对象的战斗机装备、无人机装备、作战管理域要进行两级划分,以满足系统行为分析和需求映射定义的粒度需要,如图5所示。
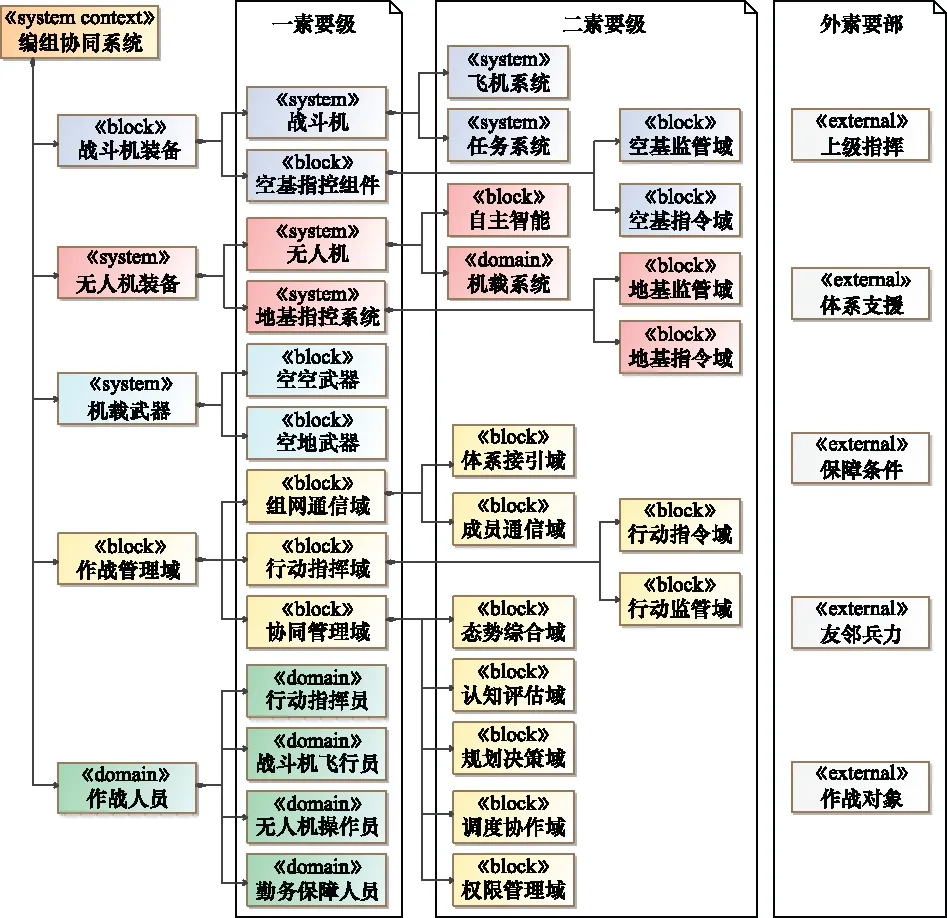
图5 FDT系统全局要素类别Fig.5 Global element classes of FDT system
其次,针对各片段场景剪裁全局要素类别,采用SysML的内部块图建立相应的要素实例及具体数量,将其作为系统操作和交互的行为实体,并通过端口和接口实现交联。
例如,对“二带二”对地编组协同的“召唤会合”片段场景,建立实例化的2架战斗机、2名飞行员、2架无人机、2名操作员、1名行动指挥员,以及1套地基指控系统、1套空基指控组件、1个通信组网域、1个行动指挥域、1个协同管理域,并进一步建立相应的二级实例,相应的端口和接口交联随系统行为分析逐步确立完善,如图6所示。
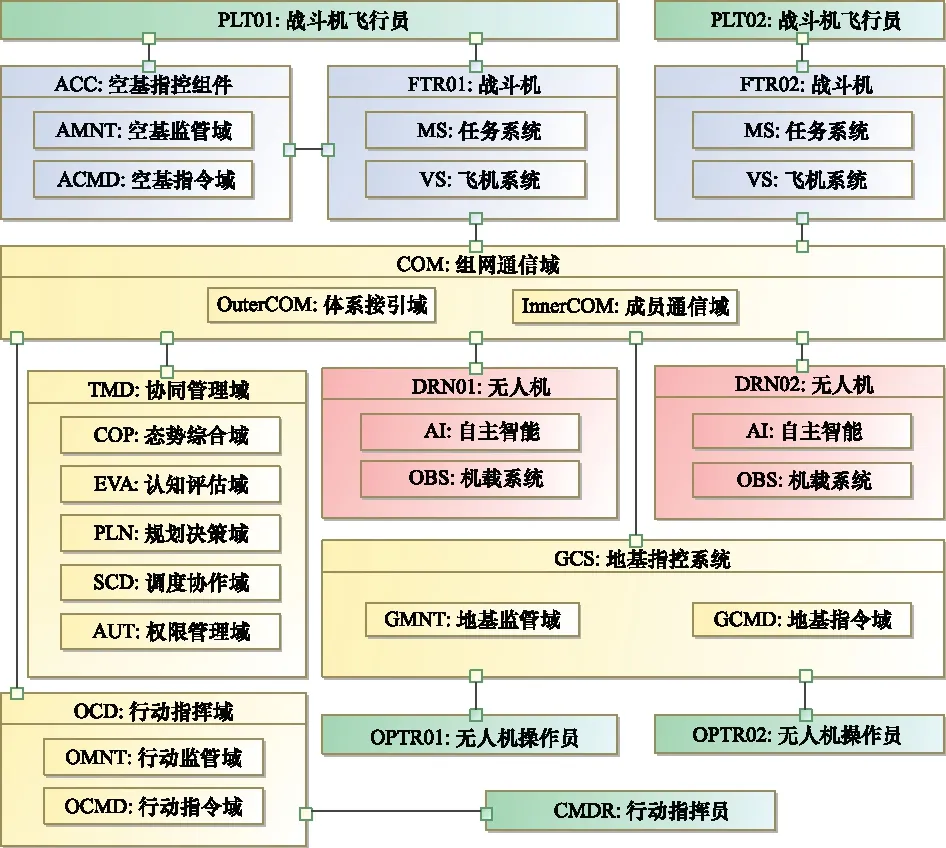
图6 “召唤会合”片段场景的要素实例Fig.6 Element instances in “on-call rendezvous” scenario
4 系统行为分析
4.1 协同原则和规程
建模分析编组协同系统的行为需要约定规范化的人机关系、角色配置和作业规程。
人机关系是FDT系统的重要组成方面,与系统智能化程度相互决定[27]。如前所述,在不同任务类型、流程、场景的不同环节中,人类指挥员、操作员、飞行员和人工智能辅助/智能自主系统之间,会呈现出多样化的人机关系。面向需求捕获,可将编组协同系统行为,按照“人在环内、人在环上、人在环外”划分为3类[28],依Sheridan[29]提出的特征等级对人机关系进一步具体地细化考虑和设计,如表1所示。
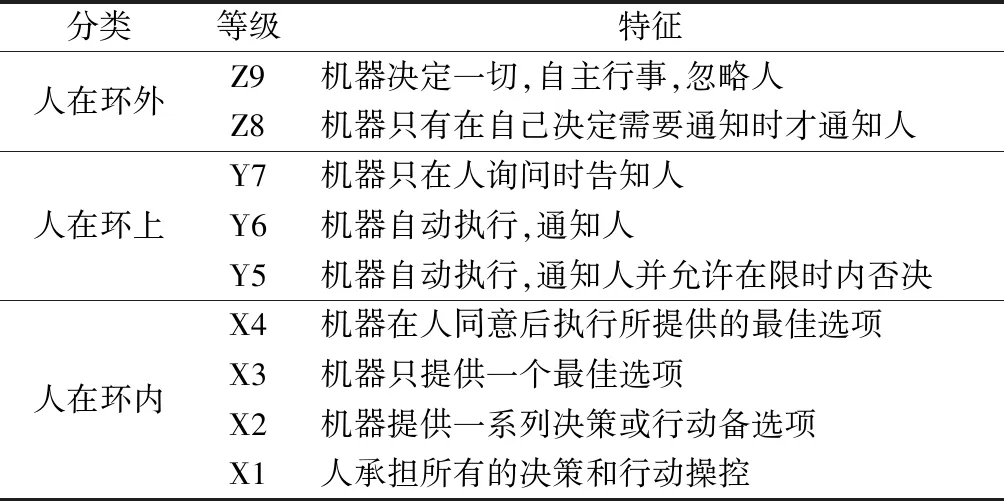
表1 FDT系统中的人机关系
角色配置以系统在战场中生存并完成任务为目标,设定编组层、单机层的感知、判断、规划、决策、执行、监督等角色及相应的权责,以便在建模分析时赋予各片段场景要素实例。例如,在“二带二”对地协同的“指控交接”片段场景中,无人机操作员和战斗机飞行员要先后承担对无人机的监督角色,并在必要时交接权责。
作业规程用来规范系统活动、信息流、指令流、事件响应、操作和交互顺序等,是系统完成特定作业时规范化的逻辑过程。编组协同主要涉及计划-准备-执行-评价式[30]的管控规程、OODA式[31]的对抗规程、搜索-识别-跟踪-瞄准-攻击-评价式[32]的杀伤规程等,是分解系统活动、操作和交互时的重要依据。
4.2 行为建模语义规范
基础的SysML语言并不足以支撑和约束编组协同系统行为模型的构建,需要对活动图、顺序图、状态图中SysML元素的用法、命名、含义、用词、用色等进行规范,并建立统一的术语词典,从而在语义层面规范化地表述系统活动、操作、交互和逻辑状态。
例如,顺序图中采用SysML的“Message 标线”来表达生命线所代表的要素实例自身要完成的操作,而采用“Event Message 标线”来表达要素实例之间要进行的交互,同时采用带前缀式的命名并规范动词、名词的使用,从而便于由模型的操作和交互行为来映射系统的需求,如表2所示。
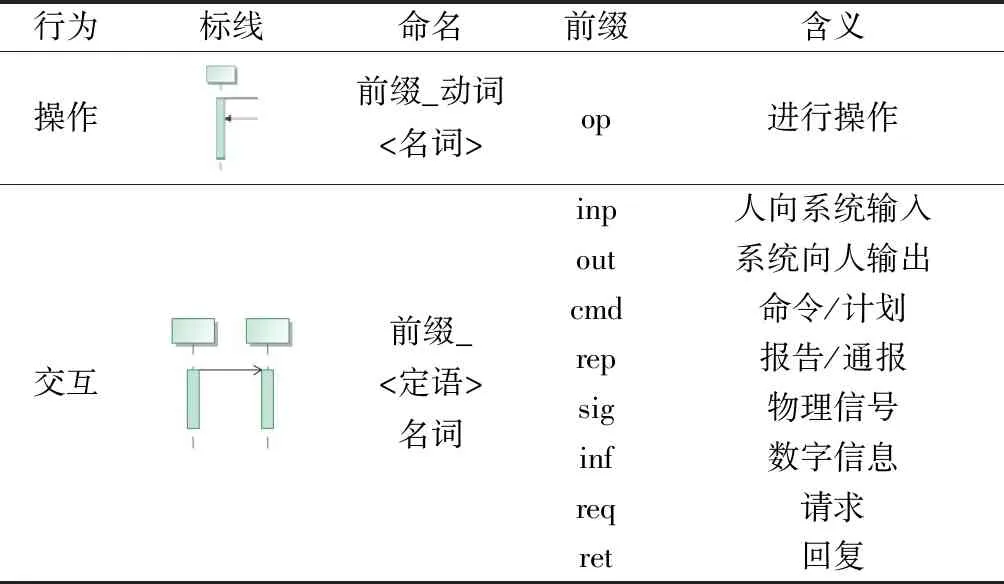
表2 顺序图中的操作和交互语义规范
4.3 活动、操作和交互分解
对系统在各片段场景中的活动、操作和交互进行分解是捕获系统需求的关键步骤。编组协同系统,要对应要素结构层次,按照协同原则、规程和建模语义规范,采取交错构建活动图和顺序图的方式,完成两级分解。
首先,以一级要素和外部要素为对象,用活动图将任务流程分解为多个一级活动,进而用顺序图将各一级活动分解为一级要素和外部要素的一系列操作和交互;然后,以二级要素为对象对顺序图进行分段,用活动图表达为多个二级活动,进而用顺序图将各二级活动分解为二级要素的一系列操作和交互。例如,分解“二带二”对地协同“空中编队”片段场景,得到“编队规划、编成队形、编队航行、编队解散”几个一级活动并建立相应的一级顺序图;其中“编成队形”顺序图划分为“发起编队、成队机动、机间防撞”几个二级活动,并建立相应的二级顺序图;进一步分解“发起编队”得到“战斗机飞行员、飞机系统、任务系统及无人机自主智能、机载系统的一系列操作和交互”,如图7所示。
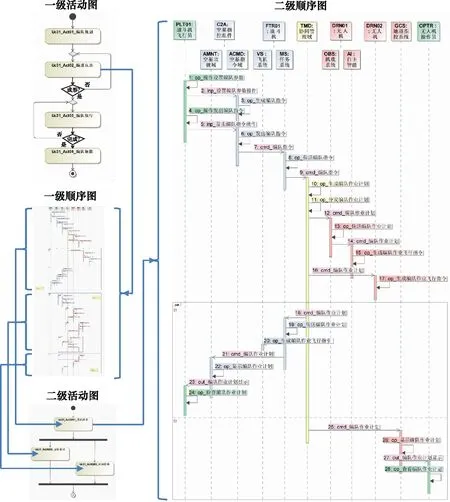
图7 “空中编队”片段场景的系统操作和交互分解Fig.7 System operations and decomposition of interactions for “formation flight” scenario
4.4 时空关系推演分析
基于编组协同系统逻辑行为和时空关系协调互洽的要求,需构建时空关系模型,结合系统活动、操作和交互的分解进行推演分析,闭环系统的物理和逻辑运行过程。
推演时,建立战斗机和无人机时空特征的准动态计算模型,对航行和机动过程进行设计,对通信、传感器、武器的指向、包络等进行关键点计算,就时间、位置、速度、可见性、覆盖性等进行分析,建立起时空关系与系统操作和交互之间的关联,形成相应的度量指标。
例如,对“二带二”对地编组“协同定位”片段场景进行推演分析,为实现在敌地面雷达形成对战斗机的火控跟踪前完成协同定位,确保无人机后续的武器发射,可形成战斗机和无人机编成队形、队形保持、信号接收、定位处理等操作相对应的间距、高差、方位角、协同定位收敛时长等度量指标,如表3和图8所示。

表3 “协同定位”片段场景时空度量指标(部分)
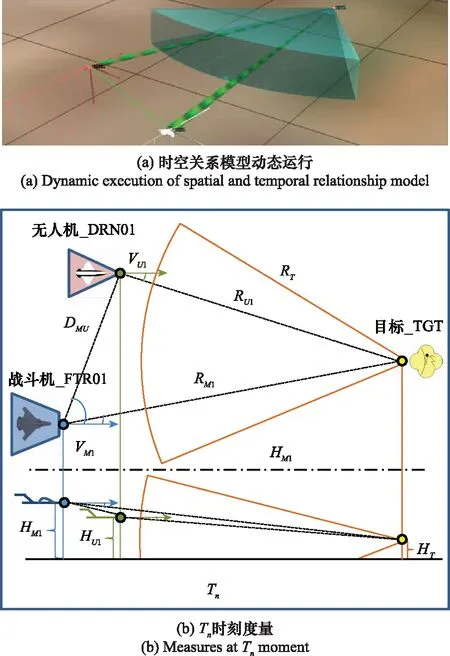
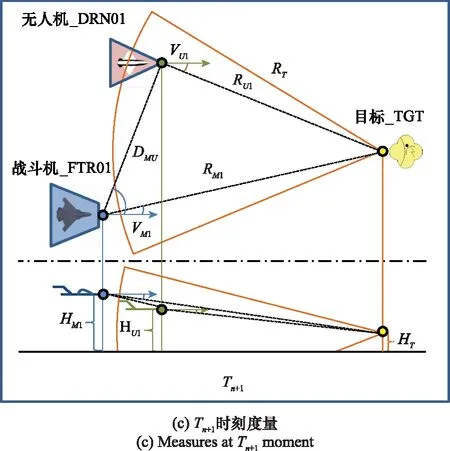
图8 “协同定位”片段场景的时空关系推演分析Fig.8 Deductive analysis of spatial and temporal relationship for “cooperative target locating” segment scenario
5 需求映射定义
需求映射定义从系统行为模型得到条目化的初始系统需求,进而采取将流程活动与要素类别相结合的方式,完成需求归并和定义。
首先,基于系统行为模型,按一级、二级“叶子”要素类别,将每个操作行为映射为一个操作性需求,将每个交互行为映射为两个(发起和接受各一个)交互性需求,并关联度量指标,得到条目化的初始需求。
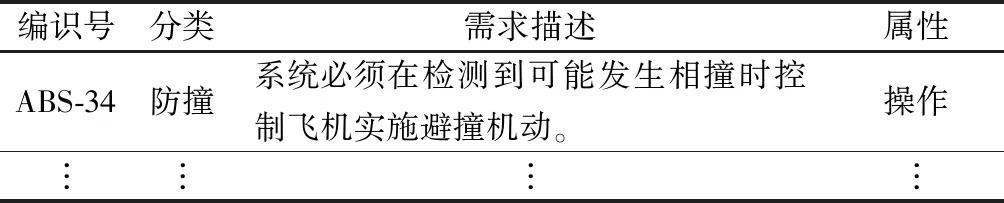
进而以协同任务的流程活动为纵坐标,以要素类别为横坐标,对所有初始需求按照对象、内容进行梳理归并,形成需求聚类和条目分解,从而定义形成系统需求,如图9所示。同时,建立“需求条目-片段场景-系统行为-度量指标”的追溯关系,形成系统需求捕获映射矩阵。
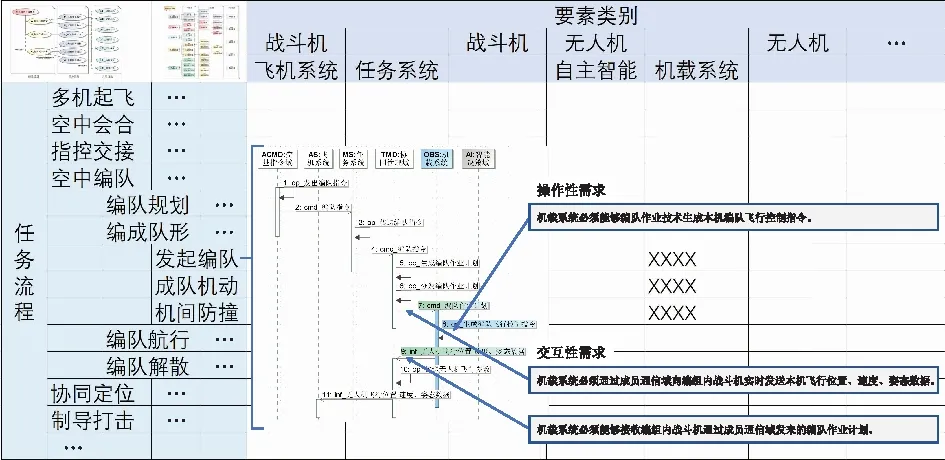
图9 由行为模型映射系统需求Fig.9 Mapping from behavior model to system requirements
通过对“二带二”对地编组协同的分析,按起飞、会合、指控交接、空中编队、协同定位、制导打击等片段场景及相应的一级、二级活动,得到战斗机飞行员、无人机操作员等一类要素及无人机机载系统、自主智能等二类要素的分类需求清单。例如,其中对无人机机载系统明确了一系列编队、防撞类的交互和操作需求,如表4所示。
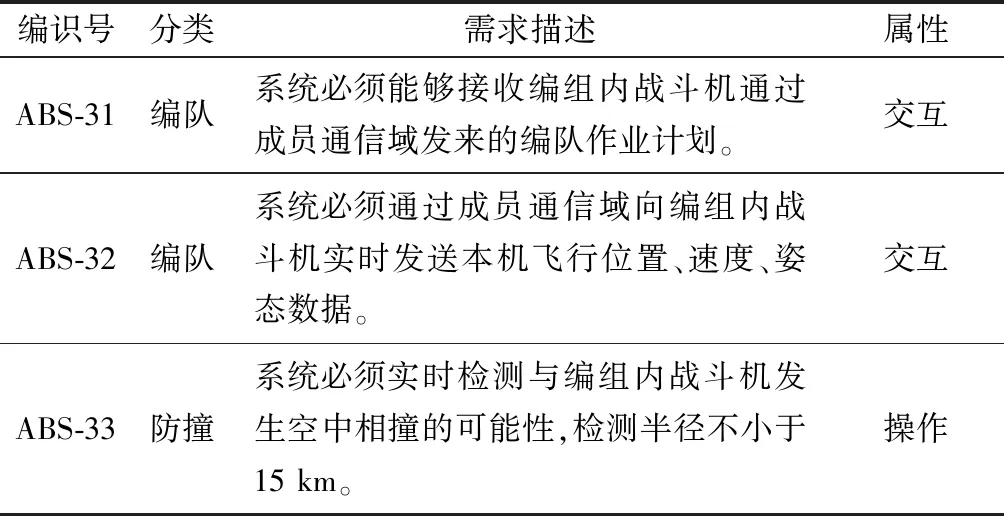
表4 无人机机载系统需求清单(部分)
续表4
6 模型在环验证
6.1 逻辑状态模型
基于系统的操作和交互行为,生成相应的端口和接口,用可运行状态图的方式转化建立系统逻辑状态模型。系统行为的正确性和协调性问题可通过模型运行被识别。由于已经在需求映射时按要素类别进行了归并,在验证建模时并不需要对不同场景下的逻辑状态模型进行合并,有效降低了验证建模和维护的复杂度。例如,“二带二”对地编组协同“指控权交接”场景中权限管理域的可运行逻辑状态模型如图10所示。
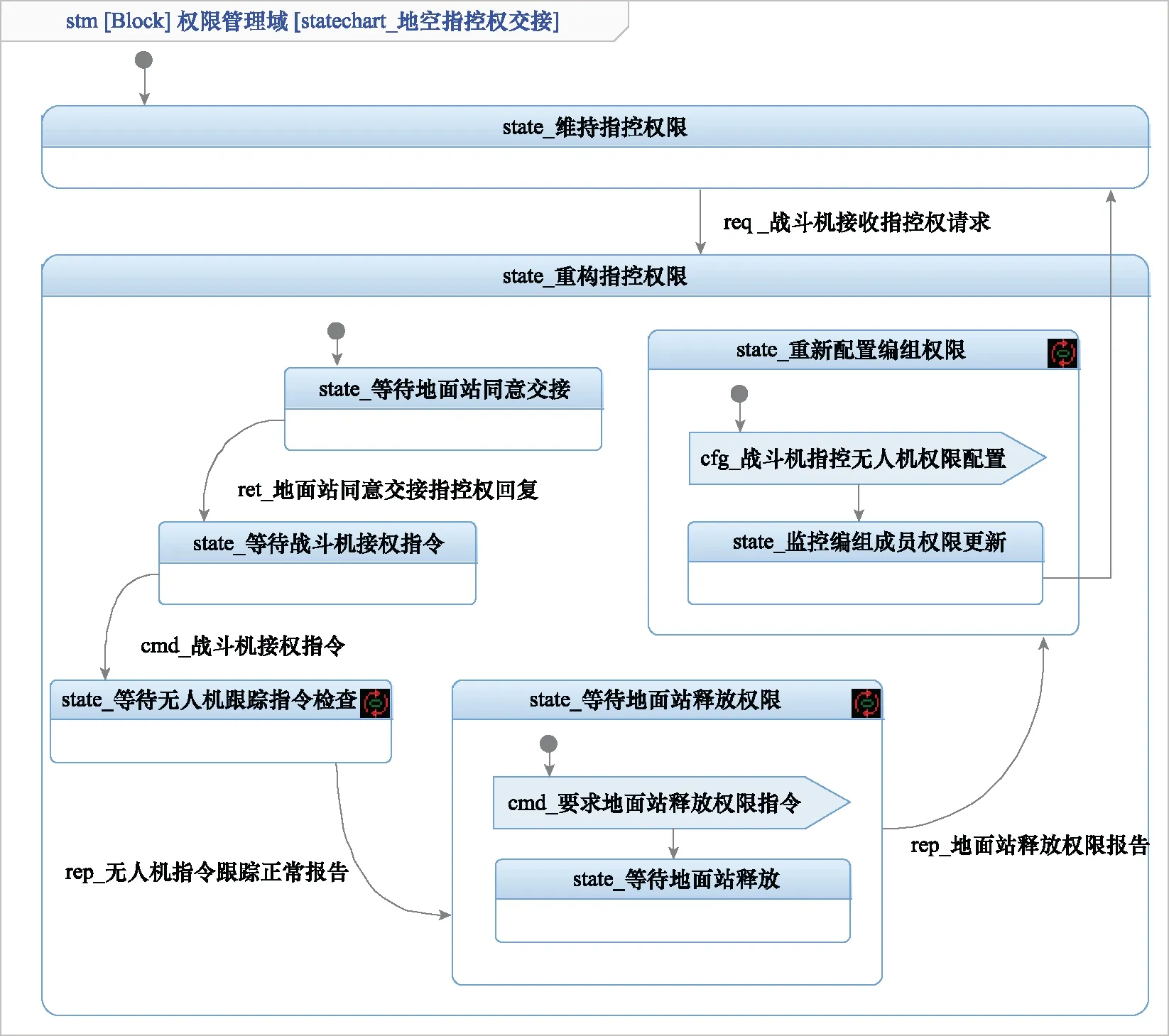
图10 “指控交接”场景权限管理域的逻辑状态模型Fig.10 Logic state model of the authority management domain in “control-authority transfer” scenario
6.2 时空运动模型
将时空关系推演分析时的准动态计算模型转化为动态仿真模型,建立系统时空运动模型,并实现与系统逻辑状态模型的双向信息交换和运行驱动。系统需求的合理性问题、系统逻辑行为和时空关系的互恰性问题、度量指标的有效性问题等可通过模型联合运行被识别,如图11所示。
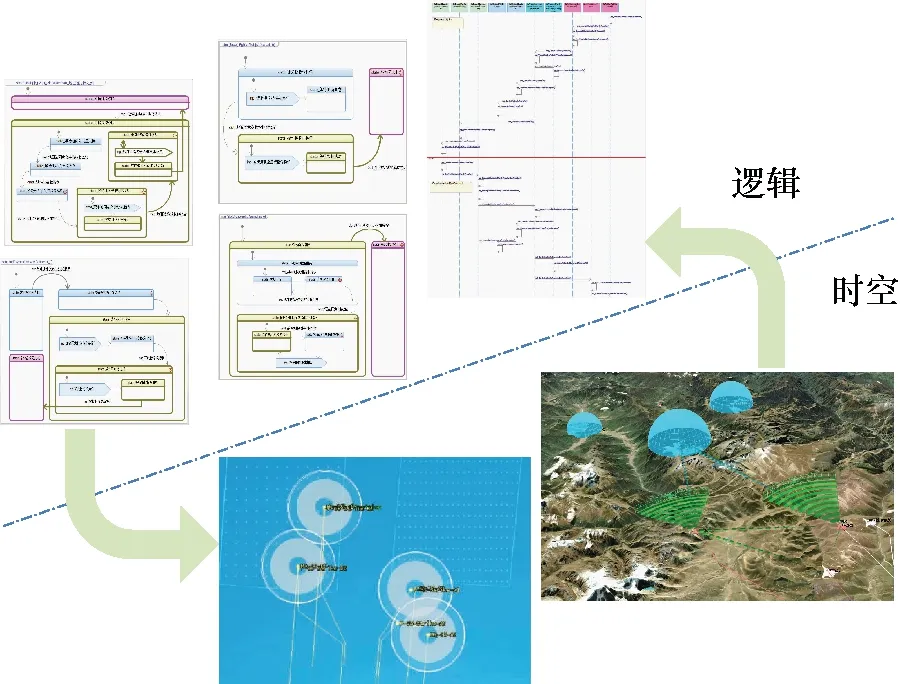
图11 逻辑状态模型与时空运动模型联合运行Fig.11 Joint operation of logic state model and spatial-temporal motion model
6.3 联合运行验证
根据各片段场景的一级活动、二级活动构建测试例,联合运行系统逻辑状态模型和时空运动模型,对照系统需求清单逐条验证系统需求,形成“需求条目-测试例-逻辑状态-时空运动”的系统需求验证跟踪矩阵,如图12所示。

图12 系统需求验证跟踪矩阵(部分)Fig.12 System requirements verification tracking matrix (in part)
通过对系统需求的合理性、完备性、一致性进行检查,对发现的问题可通过需求捕获映射矩阵进行追溯,对需求定义、度量指标或系统行为等做出修订。特别是对态势变化、通信中断、突发故障等“雨天”过程,模型在环验证需要对编组协同系统的动态需求进行有效验证。
7 应用效果
应用上述策略、流程和方法开展基于模型的“二带二”对地FDT系统需求捕获与验证,多个专业联合工作3个月,高效完成了6个任务流程共11个任务场景的系统行为分析、需求映射定义和模型在环验证。对战斗机、飞行员等4类一级要素和无人机机载系统等17类二级要素,共定义形成246条操作性需求、558条交互性需求,并为其中83条需求关联了时空度量指标。
捕获与验证结果经过汇总,向后续研发主体进行了移交,包括:按要素结构组织的系统需求清单、需求捕获映射矩阵、需求验证跟踪矩阵;按任务场景组织的系统行为模型、时空关系推演模型、逻辑状态模型、时空运动模型。这些模型化的系统需求及相应的捕获与验证依据,能够为后续的编组协同系统设计和实现提供清晰、有效的开发目标和设计指导。
8 结 论
本文面向FDT系统需求捕获与验证,提出了基于模型的策略、流程及具体方法,并以“二带二”对地编组协同为例验证了方法的有效性。研究表明:
(1) 采取“整体纳入跨装备协同要素,将分析建模和验证建模分开,划设可分拆的模型层次,制定必要的协同原则、规程和建模语义规范,同步考量逻辑行为与时空的关系”的策略,能够有效应对编组协同系统多元一体、关系多变而又必须协调互洽的复杂性特征,适于工程总体开展系统需求捕获与验证;
(2) 按照“任务场景构建、系统行为分析、需求映射定义、模型在环验证”的流程,建模难度和工作量符合国内研发实际,可多专业并行开展,能够在几个月的时间内高效完成编组协同系统数十类要素、近千条需求的捕获和验证;
(3) 通过构建协同任务类别、任务流程和片段场景,划设内外部要素结构,规范人机关系、角色配置和作业规程,基于适用的建模语义规范分层分解系统活动、操作和交互行为,推演时空度量指标,映射定义系统需求,能够实现对编组协同系统需求的正向捕获;
(4) 通过构建系统逻辑状态模型和时空运动模型,对应各片段场景完成模型在环联合运行,能够对编组协同系统需求的合理性、逻辑行为与时空关系的互恰性、度量指标的有效性实现早期验证,从而为后续研发确立清晰、有效的开发目标和设计指导。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
军事文摘(2021年17期)2021-09-24
控制与信息技术(2021年2期)2021-07-23
小学生学习指导(低年级)(2020年11期)2020-12-14
铁道通信信号(2020年5期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
科技风(2019年27期)2019-10-20
作文大王·低年级(2018年10期)2018-12-06
百科探秘·航空航天(2016年12期)2017-01-15
百科探秘·航空航天(2016年5期)2016-11-07