
SWISS整流器的自适应反步控制
2023-03-16 11:10王吉涛贾云飞王怡斐葛孟娜
哈尔滨理工大学学报 2023年5期
王吉涛 贾云飞 王怡斐 葛孟娜
摘 要:针对PI控制SWISS整流器的动态抗扰动性能较弱的问题,以SWISS整流器等效电路的状态方程为基础,结合自适应反步控制的基本原理,设计SWISS整流器以直流侧负载为系统不确定性参数的自适应反步控制器,并对其稳定性进行证明。仿真对比分析结果表明,相较于传统双闭环PI控制,自适应反步控制的SIWSS整流器具有更优越的稳态输出特性和抗负载突变扰动等动态响应性能,并通过基于RT_BOX的半实物实验平台进一步验证了仿真结果的正确性和自适应反步控制策略的有效性。
关键词:SWISS整流器;自适应反步控制;PI控制;稳态特性
DOI:10.15938/j.jhust.2023.05.003
中图分类号: TM461
文献标志码: A
文章编号: 1007-2683(2023)05-0019-08
Adaptive Backstepping Control of SWISS Rectifier
WANG Jitao, JIA Yunfei, WANG Yifei, GE Mengna
(School of Electrical and electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:Aiming at the weak dynamic anti disturbance performance of PI controlled Swiss rectifier, based on the state equation of the equivalent circuit of SWISS rectifier and combined with the basic principle of adaptive backstepping control, an adaptive backstepping controller of SWISS rectifier with load as the system uncertain parameter is designed, and its stability is proved. The simulation results show that compared with the traditional double closed-loop PI control, the adaptive backstepping control SWISS rectifier has better steady-state output characteristics and dynamic response performance against sudden load disturbance. The hardware in the loop experimental platform of box further verifies the correctness of the simulation results and the effectiveness of the adaptive backstepping control strategy.
Keywords:SWISS rectifier; adaptive backstepping control; PI control; steady characteristics
收稿日期: 2022-05-19
基金项目: 黑龙江省科技厅留学归国人员基金(LC05C05).
作者简介:
贾云飞(1997—),男,硕士研究生;
王怡斐(1997—),女,硕士研究生.
通信作者:
王吉涛(1971—),男,工程师,E-mail:131817353532@163.com.
0 引 言
SWISS整流器作为一种新型的三相降压型功率因数校正电路,具有输出电压宽范围内可调、开关损耗低和效率高,同时其谐波电流注入网络可以大大减小网侧输入电流的畸变率等优点,在电动汽车大功率快充领域具有非常广阔的应用前景[1-2]。文[3-5]在六开关降压型功率因数校正电路拓扑及其控制方法的基础上,改进提出了SWISS整流器最初的拓扑结构及其双闭环PI控制策略,但是传统的PI控制是对系统近似线性化处理后加以控制[6],逐渐无法满足工程实际应用中更高的控制性能需求。为了满足各种工况下的性能要求,涌现了许多针对SWISS整流器的控制策略,包括单周期控制[7],预测控制[8],滑模控制[9],以及模糊PI控制[10]等。
SWISS整流器是一種根据输出直流信号的反馈进行控制的非线性系统,并且在实际工程情况中,输出侧所接负载随时可能发生变化,具有不确定性。反步控制[11]是一种适用于严格反馈系统的非线性控制设计方法,自适应控制[12]可以减小不确定参数对系统稳定性造成的负面影响,将这两种控制策略结合的自适应反步控制[13],可以实现对SWISS整流器的非线性和负载不确定性的针对性控制,因此本文将该非线性控制策略应用于SWISS整流器以提高系统的整体性能。
1 整流器的等效电路模型
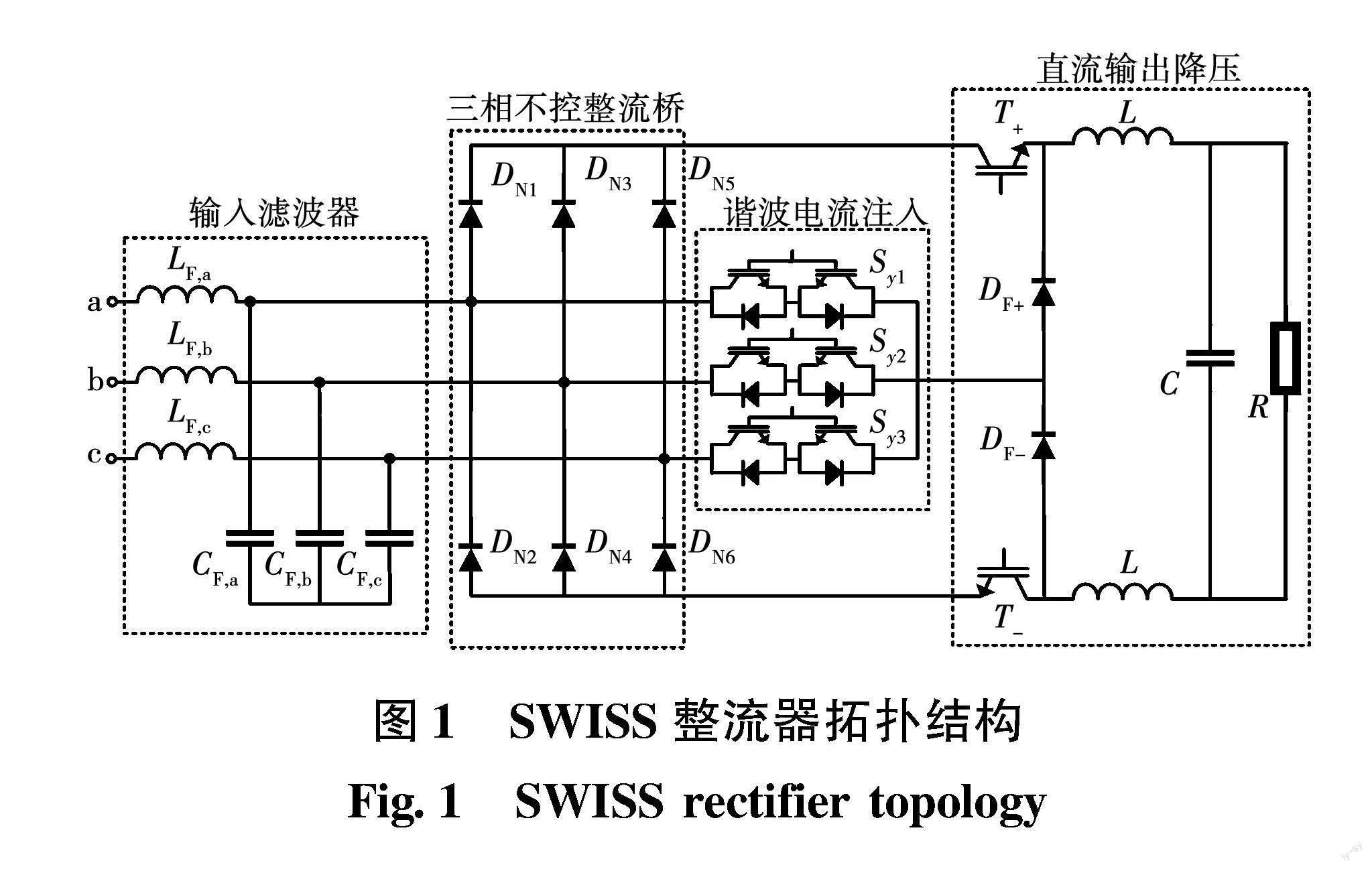
传统的SWISS整流器电路拓扑结构如图1所示,理想的三相交流电源经过LC滤波器后再接三相不可控整流桥,根据其整流功能特性可知,三相交流电流的波形在电源的一个正(或负)半周的导通相位角为120°,其中有60°的死区,电流波形严重畸变。为了使三相电流波形与电压同相位运行,谐波电流注入电路在电流死区内,导通对应相开关,引入直流侧电流以补偿死区,使得各相电流相位跟随电压,实现功率因数校正。两个DC-DC降压电路上下并联组成输出降压电路部分,其中快速开关管T+和T-与谐波注入电路的开关管以特定的控制逻辑配合工作使SWISS整流器实现PFC(power factor correction,PFC)功能并且输出稳定的直流电压和电感电流[14]。
根据任意时刻三相电压的数值大小关系,可以将一个电源基波周期内的三相输入电压分为6个扇区,每个扇区60°,如图2所示。
在每个扇区内,各相电压大小关系都是固定不变的,在任何时刻都有其中某一相电压处于其他两相电压之间,此时该相电流为零,即处于60°的电流死区。控制谐波注入电路中对应相的开关管导通对此相输入电流死区进行补偿,即任何时刻谐波注入电路中的3个双向开关有且只有一个处于导通状态。以同样的原理分析其余扇区后可以得到一个基波周期内按扇区划分的谐波注入电路各开关管控制逻辑信号如表1所示,其中0代表关闭,1代表导通。
对于输出降压部分的两个快速开关管T+和T-,假设其开关频率足够高且远远大于电源额定频率,对于输出电感L,假设其电感值较大且忽略电流高频纹波,在此假设条件下,就可以將每一个采样周期内的输出直流侧电感电流iL近似认为是一个恒定不变值IDC。在扇区1中,根据两个快速开关管的导通状态,SWISS整流器具有4种不同的工作模态,如图3所示。
采用状态空间平均建模法对四种工作模态进行开关周期平均建模[15-16],最终得到SWISS整流器的状态空间平均数学模型为
2LdiLdt=32MUm-uC
CduCdt=iL-uCR
uo=uC(1)
式中:uC为输出侧电容的平均电压;uo为负载直流电压;iL为输出侧电感的平均电流;M为调制参数;Um为输入侧三相对称交流电压的幅值。
对式(1)的状态空间平均模型进行分析并与基本DC-DC电路类比可得,调制参数M可以类比为基本DC-DC电路的开关管T的占空比,1.5Um可以类比为基本DC-DC电路的输入直流电源E,则可以得到SWISS整流器相对应的理想等效电路模型为如图4所示的基本DC-DC电路。
2 SWISS整流器的自适应反步控制
2.1 自适应反步控制器设计
假设SWISS整流器中的元件均为理想元件,即开关管的导通与关断没有损耗且无管内压降,各储能元件的寄生电阻为零,系统工作在连续工作模式(continuous conduction mode,CCM)。得到SWISS整流器等效DC-DC电路模型的状态方程为
1=-1RCx1+1Cx2
2=-1Lfx1+ELfμ(2)
式中:x1为输出侧电容的平均电压uc,即等效电路模型的输出直流电压uo;x2为输出侧电感的平均电流iL;E为等效输入直流电源;μ为所设计自适应反步控制器的控制律,即等效开关管T的占空比。
在对SWISS整流器的性能进行研究分析时,负载调整率是一项研究其动态性能的重要指标。为了提高SWISS
整流器在负载突变时的各项性能指标,将负载R作为自适应反步控制器中的不确定参数进行处理。
令θ=1/R,则状态方程变为
1=-θCx1+1Cx2
2=-1Lfx1+ELfμ(3)
根据自适应反步控制的基本原理,SWISS整流器的自适应反步控制器设计步骤如下:
第一步,定义输出直流电压误差变量
z1=x1-ud(4)
式中:ud为状态变量x1的期望值,即系统输出电压参考值。对式(4)求导并将式(3)代入得
1=1-d=-θCx1+1Cx2-d(5)
定义输出电感电流误差变量为
z2=x2-α1(6)
式中:α1为中间虚拟控制量,在后续控制器设计中给出其详细公式。为了保证子系统(5)的渐近稳定,选取状态变量x1的Lyapunov函数为
V1=(z1+x1)22(7)
对式(7)求导得
V·1=(z1+x1)(1+1)(8)
将式(4)和式(5)代入式(8)得
V·1(z1+x1)(21-d)=
2(z1+x1)1+d2=
2(z1+x1)-θCx1+1Cz2+1Cα1-d2(9)
设计中间虚拟控制量为
α1=θ^x1+Cd2-c1C(z1+x1)(10)
式中:c1>0为设计参数, θ^为系统不确定参数θ的估计值,定义θ~=θ-θ^为不确定参数的估计误差。
将所设计的中间虚拟控制量代入求导之后的Lyapunov函数中得
V·1=2(z1+x1)-θCx1+1Cz2+1Cα1-d2=
2(z1+x1)x1C(θ^-θ)+1Cz2-c1(z1+x1)=
-2c1(z1+x1)2+2C(z1+x1)(z2-x1θ~)(11)
第二步,对式(6)求导得
2=2-1=-1Lfx1+ELfμ-1(12)
求取中间虚拟控制量的导数,对式(10)求导并将式(3)和式(5)代入其导数结果后整理得
1=θ^·1+Cd2-c1C(1+1)=
θ^·-θCx1+1Cx2+Cd2-c1C2Cx2-2θCx1-d=
2c1-θ^·C(θx1-x2)+Cd2+c1d(13)
将式(13)代入式(12)得
2=2-1=-1Lfx1+ELfμ-1=
-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-
Cd2+c1d(14)
为了保证此系统的稳定性,选取Lyapunov函数
V2=V1+12z22+12γθ~2(15)
对上式求导得
V·2=V·1+z2z+1γθ~θ~·(16)
式中:γ为大于零的任意常数,称为不确定参数的自适应增益。
将式(8)、(11)和(14)代入上式化简整理得
V·2=V·1+z2z+1γθ~θ~·=
-2c1(z1+x1)2+2C(z1+x1)(z2-x1θ~)+(x2-
α1)
-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-Cd2+
c1d+
1γθ~θ~·=
-2c1(z1+x1)2+(x2-
α1)
2C(z1+x1)-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-
Cd2+c1d+θ~1γ(θ-θ^·)-2Cx1(z1+x1)(17)
为了除去V·中的不確定项,即上式中的第二项和第三项,可选取自适应律和控制律为
θ^·=θ-2γCx1(z1+x1)(18)
μ=LfE-c2(x2-α1)-2C(z1+x1)+1Lfx1+
2c1-θ^·C(θx1-x2)+Cd2+c1d(19)
式中c2>0为设计参数。
式(18)所示的自适应律和式(19)所示的控制律即为SWISS整流器的自适应反步控制器。
2.2 稳定性分析
为了证明所设计自适应反步控制器是稳定的,将式(18)和(19)代入式(17)得
V·2=-2c1(z1+x1)2-c2(x2-α1)2(20)
显然,V·2<0为负定的,根据李雅普诺夫第二方法理论,所设计的由式(18)和(19)构成的自适应反步控制器是全局渐进稳定的。
根据SWISS整流器等效电路模型可知,式(19)所设计控制律μ为等效开关管T的占空比,即调制参数M。根据SWISS整流器工作原理可知,调制参数M为SWISS整流器输出降压部分两个快速开关管T+和T-的占空比调制信号。
将SWISS整流器的输出直流电压、电感电流和电压参考值反馈到自适应反步控制器后得到控制律μ=M,比上三相交流相电压幅值Um之后与输入交流电压的最大值和最小值的绝对值相乘,并与载波PWM调制之后就可以得到两个开关管的占空比控制信号。最终可以得到SWISS整流器的自适应反步控制策略框图如图5所示。
3 仿真分析
为了验证所设计的自适应反步控制器的可行性,根据式(18)和式(19),在Simulink中搭建自适应反步控制下的 SWISS整流器仿真模型。主电路仿真参数如表2所示,自适应反步控制器中参数取c1=50000,c2=83000,自适应增益γ=0.02。
取仿真时间为0.25s,设定输出电压参考值为350V,在0.15s时将其变为450V,在0.05s时设置负载缩小一半,即从81Ω突降为40.5Ω,0.1s时突增为原额定阻值81Ω。最终得到基于自适应反步控制的SWISS整流器输入侧A相电压电流、输出直流电压和电感电流波形如图6所示。
根据仿真结果表明,自适应反步控制下的SWISS整流器可以在实现功率因数校正功能的同时输出稳定的直流电压和电流,验证了所设计SWISS整流器的自适应反步控制器的可行性和正确性。
3.1 稳态特性对比分析
为了验证自适应反步控制策略相比于传统双闭环PI控制策略在SWISS整流器稳定工作时所具有的优越性,对两种控制策略下的输出直流电压和电感电流纹波进行对比分析。
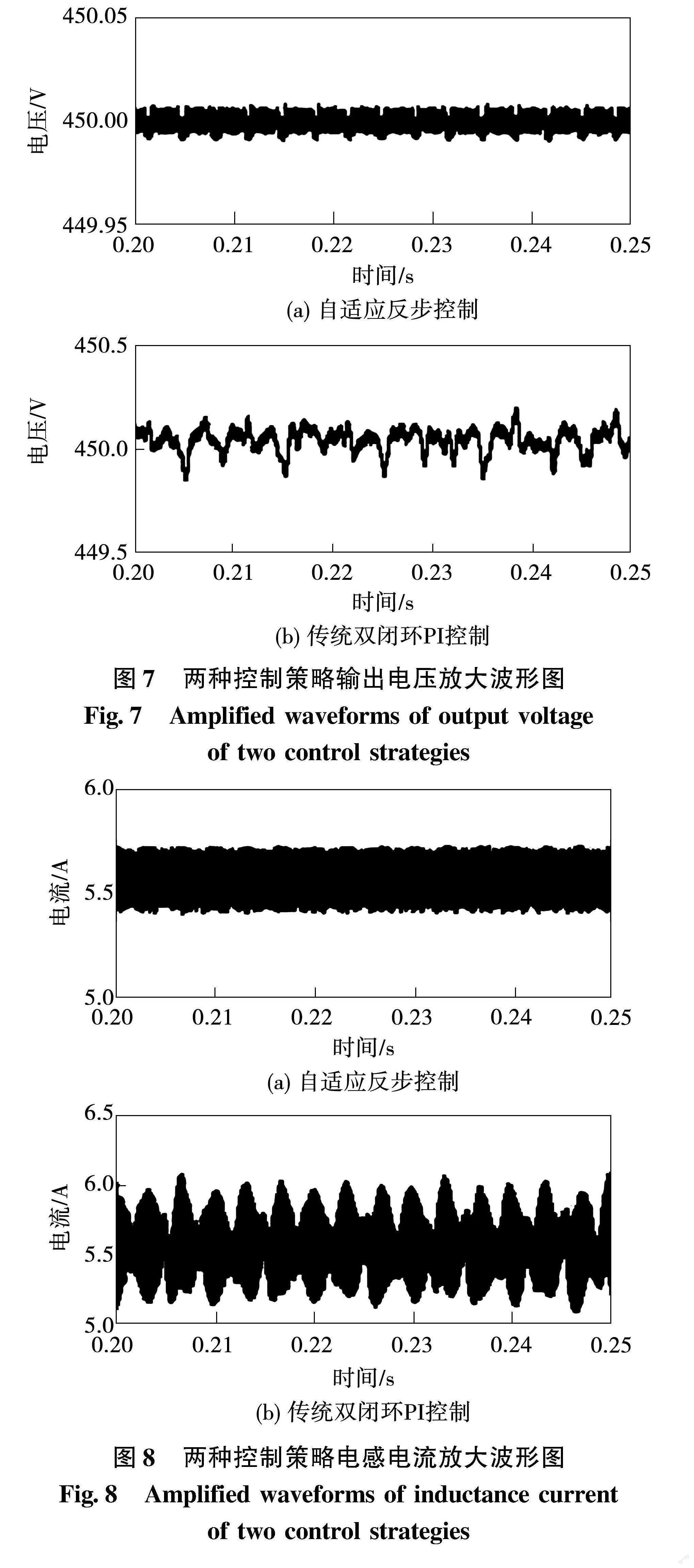
取仿真时间段为0.2~0.25s的波形图局部放大得到两种控制策略下的输出电压和电感电流放大波形如图7和图8所示。
根据仿真波形图可以看出,传统双闭环PI控制策略下的SWISS整流器输出电压和电感电流的纹波幅值较大,计算得到电压和电流纹波因数约为0.044%和8.03%,且输出电压波形呈现振荡状态,有不稳定趋势;自适应反步控制策略的输出电压和电感电流纹波因数分别为0.002%和2.68%,且输出电压波形质量更优,证明了所研究的自适应反步控制策略能够大幅地降低SWISS整流器的输出电压和电感电流纹波幅值,有效地改善输出电压电流波形质量,具有较好的稳态控制性能。
3.2 动态特性对比分析
为了验证所设计SWISS整流器的自适应反步控制器在动态响应性能方面的优越性,对系统启动时的工作响应状态、负载发生突变和输出参考电压变化三种运行工况进行仿真分析,并将仿真结果与同样工况下的传统双闭环PI控制策略结果进行对比分析。
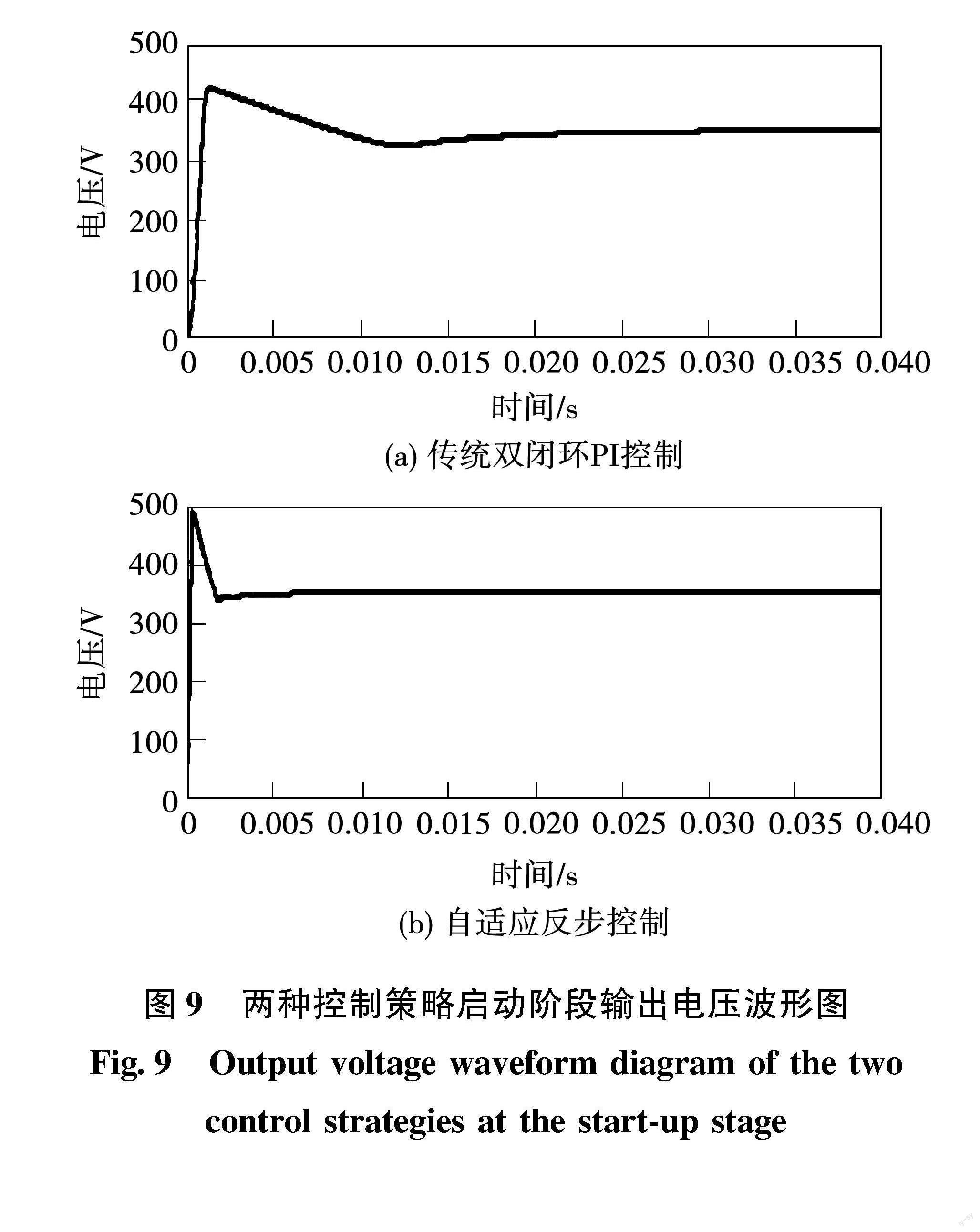
取仿真时间段为0~0.04s的SWISS整流器输出直流电压波形局部放大得到两种控制策略下的启动阶段波形如图9所示。根据仿真波形图可以看出,在SWISS整流器的启动阶段,自适应反步控制策略的输出电压能够很快地收敛并且达到稳定输出值,相较于双闭环PI控制策略调节时间缩短了0.023s,达到稳态的调节时间短并且上升速度快。
设定仿真条件在0.05s时负载电阻突降,从81Ω变为40.5Ω,得到两种控制策略下SWISS整流器受到负载突减扰动时的输出电压波形如图10所示。可以看出,传统双闭环PI控制下的SWISS整流器电压超调量约为2.1V,需要约0.017s的调节时间重新达到稳态,而采用自适应反步控制策略,能够将电压超调量降低到约0.7V,调节时间缩短到0.004s。
设定在0.15s将输出电压参考值从350V突变为450V。图11为两种控制策略下SWISS整流器在参考电压突变时的输出电压局部放大波形图。可以看到自适应反步控制策略下输出电压达到稳定的调整时间约为0.0025s,而传统PI控制下的调整时间约为0.007s;自适应反步控制策略在参考电压突变时的超调量相较于传统PI控制也略微减小。
4 半實物实验验证
为了进一步验证所设计SWISS整流器的自适应反步控制器的可行性和有效性以及仿真分析结果的正确性,在如图12所示的基于RT_BOX的半实物实验平台上对其进行相对应的实验研究。
图13为基于自适应反步控制的SWISS整流器稳态运行时的波形图。其中Uo和IL为输出450V直流电压时的电压和电感电流波形,ua和ia为输入侧A相的交流电压电流波形。从实验结果波形图可以看到,输入侧A相电压和电流基本保持同相位运行,即在单位功率因数运行的同时实现了输出稳定的直流电压和电感电流。
图14为SWISS整流器从启动达到输出350V电压稳态的电压波形图。从图中可以看出,整流器在启动时的冲击电压相较于稳态时的350V电压高出约136V,达到稳态的时间约为5.7ms。
图15为负载阻值从81Ω突减为40.5Ω时的实验测试结果波形图。可以看出当输出电压350V,负载阻值突减为原来的一半时,达到再次稳定的电压超调量约为1V,调节时间约为4ms。
图16为输出直流参考电压从350V突变到450V时,SWISS整流器的输出电压波形图。可以看到,调节过程中的超调量约为20V,达到450V新稳态的调节时间约为2ms。
将实验测试结果与仿真结果在各种工况下的性能指标对比发现,实验结果与仿真结果基本一致,证明了仿真分析的正确性,也进一步验证了所设计的自适应反步控制器的可行性和有效性。
5 结 论
本文针对传统双闭环PI线性控制的抗扰动性能和动态特性较差的问题,以SWISS整流器等效电路模型的状态方程为基础,设计了自适应反步控制器。仿真对比分析和实验测试结果表明,相较于双闭环PI控制,所设计的自适应反步控制器降低了输出电压和电感电流的纹波,缩短了启动响应时间,并且当受到负载突变和参考电压突变扰动时,减小了调节过程中的超调量和达到稳态的调节时间,具有更优的稳态特性和动态响应特性,验证了所设计控制器的正确性和有效性。
参 考 文 献:
[1] 胡合壮. 基于多相耦合电感的SWISS整流器研究[D].长沙: 湖南大学, 2019.
[2] 李湖胜. 用于电动汽车充电的SWISS整流器研究[D]. 长沙: 湖南大学, 2017.
[3] FRIEDLI T, HARTMANN M, KOLAR J W. The Essence of Three-Phase PFC Rectifier Systems-Part II[J]. IEEE Transactions on Power Electronics, 2014, 29(2): 1.
[4] SOEIRO T B, FRIEDLI T, KOLAR J W. Three-phase High Power Factor Mains Interface Concepts for Electric Vehicle Battery Charging Systems[C]. Applied Power Electronics Conference and Exposition (APEC), IEEE, 2012: 2603.
[5] SOEIRO T B, FRIEDLI T, KOLAR J W. Swiss Rectifier-A Novel Three-phase Buck-type PFC Topology for Electric Vehicle Battery Charging[C]. Applied Power Electronics Conference and Exposition (APEC), IEEE, 2012: 2617.
[6] 贾强, 王栋, 亓迎川, 等. SWISS整流器的改进型双环控制系统设计[J]. 空军预警学院学报, 2018, 32(2): 142.
JIA Qiang, WANG Dong, QI Yingchuan, et al. Design of Improved Double Loop Control System for Swiss Rectifier[J]. Journal of Air Force Early Warning Academy, 2018, 32(2): 142.
[7] 张强. 降压型三相功率因数校正电路与鲁棒控制策略的研究[D]. 福州: 福州大学, 2016.
[8] 李森铎. 基于预测控制的SWISS整流器研究[D]. 黑龙江: 哈尔滨理工大学, 2020.
[9] 李瑞松. SWISS整流器的非奇异终端滑模控制策略研究[D]. 哈尔滨: 哈尔滨理工大学, 2021.
[10]JIA Q, QI Y, XIONG X, et al. Research and Implementation of SWISS Rectifier Based on Fuzzy PI Control[C]// International Conference on Mechanical, Control and Computer Engineering (ICMCCE), IEEE, 2018: 31.
[11]宋金秋, 段彬, 付程, 等. 电网不平衡工况下高频链矩阵变换器非线性反步控制策略[J].中国电机工程学报, 2022, 685(2): 761.
SONG Jinqiu, DUAN Bin, FU Cheng, et al. Nonlinear Backstepping Control Strategy of High Frequency Link Matrix Converter under Unbalanced Power grid Conditions[J]. Chinese Journal of Electrical Engineering, 2022, 685(2): 761.
[12]颜景斌, 杨晨, 常龙龙, 等. 虚拟同步发电机惯量阻尼协同自适应控制策略[J].哈尔滨理工大学学报,2019,24(6):58.
YAN Jingbin, YANG Chen, CHANG Longlong, et al. Cooperative Adaptive Control Strategy for Inertia Damping of Virtual Synchronous Generator[J]. Journal of Harbin University of Science and Technology, 2019, 24(6): 58.
[13]刘乐, 蔺明浩, 李晓刚, 等. 基于模糊干扰观测器的电液伺服位置系统自适应反步控制[J]. 电机与控制学报, 2019, 182(12): 143.
LIU Le, LIN Minghao, LI Xiaogang, et al. Adaptive Backstepping Control of Electro-hydraulic Servo Position System Based on Fuzzy Disturbance Observer[J].Journal of Electrical Machinery and Control, 2019, 182(12): 143.
[14]颜景斌, 沈云森, 刘思, 等. SWISS整流器多目标优化[J]. 哈尔滨理工大学学报, 2021, 26(1):86.
YAN Jingbin, SHEN Yunsen, LIU Si, et al. Multi Objective Optimization of Swiss Rectifier[J]. Journal of Harbin University of Science and Technology, 2021, 26(1): 86.
[15]P Cortés, VANCU M F, KOLAR J W. Swiss Rectifier Output Voltage Control with Inner Loop Power Flow Programming (PFP)[C]// Control & Modeling for Power Electronics, IEEE, 2013: 1.
[16]周国华, 冷敏瑞, 李媛, 等.开关变换器及其控制环路的建模综述[J]. 中国电机工程学报, 2020, 40(1): 183.
ZHOU Guohua, LENG Minrui, LI Yuan, et al. Overview of Modeling of Switching Converter and Its Control Loop[J]. Chinese Journal of Electrical Engineering, 2020, 40(1): 183.
(編辑:温泽宇)
