基于模型更新的子结构拟静力混合试验方法
2023-09-02 07:07孟丽岩刘家秀
黑龙江科技大学学报 2023年4期
孟丽岩, 刘家秀, 王 涛
(黑龙江科技大学 建筑工程学院, 哈尔滨 150022)
0 引 言
结构拟静力试验是目前检验和发展结构抗震设计方法的主要手段[1-2]。随着新材料、新装置、新结构形式的出现,传统的拟静力试验因受实验室设备加载能力的限制,其试验对象通常为结构构件、子结构或整体结构的缩尺模型,试验结果难以再现整体结构抗震性能[3-4]。在现有条件下,如何进行整体结构的拟静力试验成为结构抗震试验技术的新挑战。
文中提出一种基于模型更新的子结构拟静力混合试验方法。首先探讨新型拟静力试验的可行性;其次,对在线及离线参数识别和模型更新策略进行分析;再次,提出一种基于统计的UKF模型更新方法;最后,进行二层钢框架结构拟静力混合试验数值模拟验证。
1 试验方法原理
基于模型更新的子结构拟静力混合试验方法的基本思想是,通过整体结构拟静力分析获得物理子结构的加载命令;基于物理子结构加载测得的恢复力,在线识别其本构模型参数,并更新整体结构模型。该方法结合了子结构物理试验和整体结构拟静力分析,可以检验整体结构抗震性能。方法原理如图1所示。

图1 基于模型更新的子结构拟静力混合试验方法原理Fig.1 Schematic of substructure quasi-static hybrid test method based on model updating
该试验方法包括三个模块:整体结构有限元分析模块、物理子结构试验模块和本构参数识别模块。根据试验条件确定物理子结构,通过作动器实现边界条件。采用OpenSees有限元软件进行整体结构拟静力分析,采用Matlab软件进行参数识别,采用基于TCP/IP协议的Socket通讯技术实现OpenSees有限元软件和MATLAB软件之间的数据通讯[5]。
在整体结构有限元分析模块中,根据事先选定的加载制度进行整体结构拟静力分析,得到结构反应,将物理子结构边界自由度上的位移发送给物理子结构试验模块。在物理子结构试验模块中,通过作动器实现物理子结构边界自由度上的目标位移加载,测得物理子结构恢复力,将试验测得的物理子结构位移和恢复力发送给本构参数识别模块。在本构参数识别模块中,基于物理子结构位移、恢复力测量值和假定的物理子结构数值模型,采用参数识别方法在线识别物理子结构本构参数,并将参数识别值在线更新整体结构有限元模型,之后进行下一步的整体结构拟静力加载分析,如此往复进行至试验结束[6-7]。具体的实施步骤为:
步骤1在有限元软件建立整体结构数值模型,确定模型参数更新数值子结构和物理子结构。
步骤2在加载设备上安装子结构及其相关部分作为物理子结构,在物理子结构上布置位移传感器,并将位移传感器连接至力学测试系统控制器的外界输入通道。



步骤8重复步骤(3)~(8),直至试验加载结束[8]。
2 试验模拟程序实现方法
基于模型更新的子结构拟静力混合试验数值模拟中的整体结构有限元分析模块、本构参数识别模块及物理子结构试验模块是在OpenSees和Matlab两个不同的软件分析平台上完成,因此,需要解决它们之间数据的交互问题,即实现MATLAB和OpenSees间的数据通讯。文中采用基于TCP/IP协议Socket通讯技术的间接法,通过调动Matlab和OpenSees的内部函数得以实现。
通过CS(Client-Server)技术、利用Tcl语言中已有的Socket相关命令,将OpenSees改造为计算服务器。客户端为一段简单的Tcl命令,此小段命令可以集成到其他任何复杂的平台中例如集成到Matlab中[9]。主要包括以下4个主要文件:服务器端文件server.tcl、getTotalResisting.tcl、model.tcl和客户端文件。集成和调用方法及步骤,如图2所示。
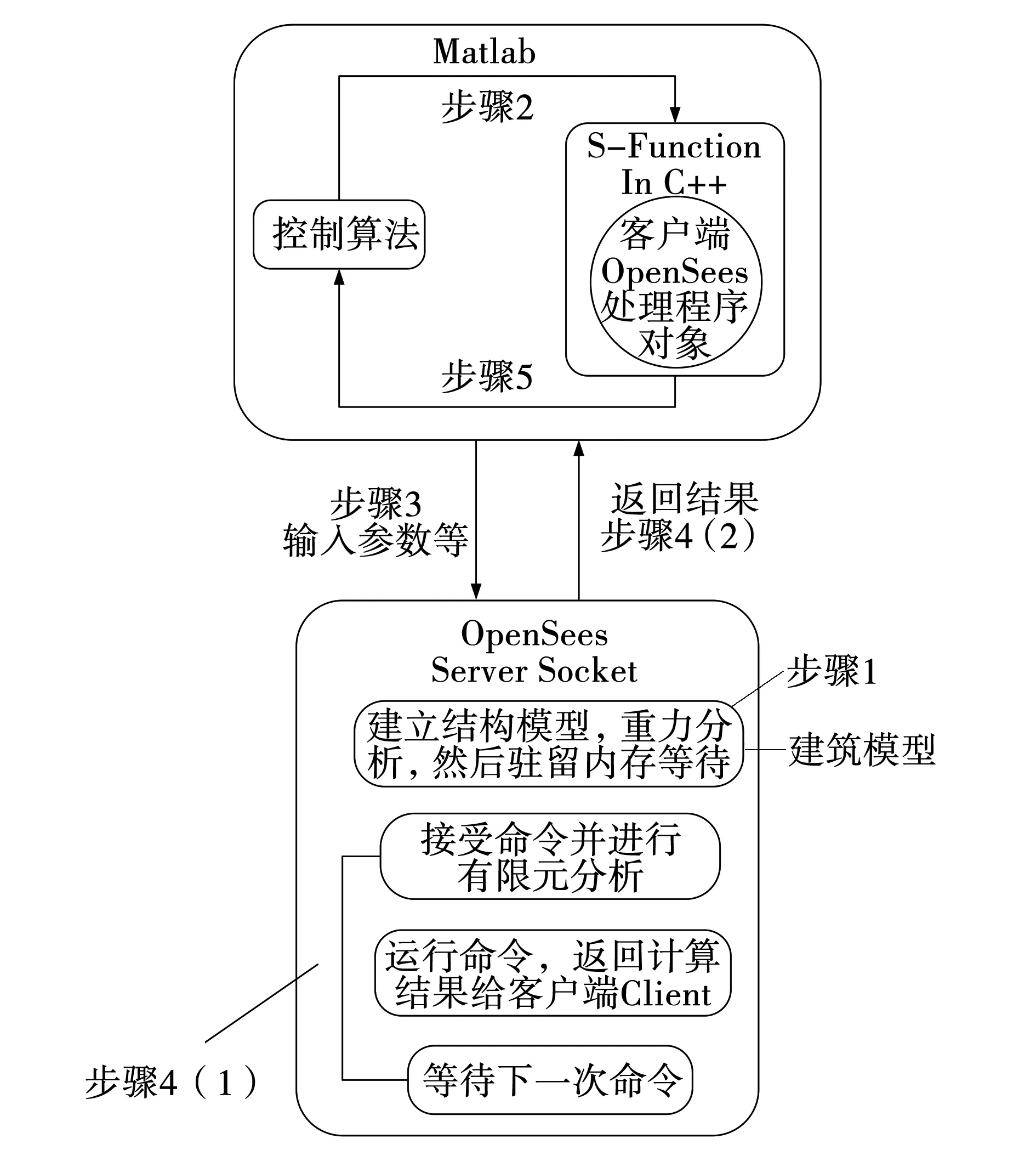
图2 Matlab与Opensees数据传输流程Fig.2 Matlab and Opensees data transfer flowchart
3 模型更新策略
3.1 更新策略
模型更新试验从本质上包含参数识别和参数更新两个方面,在参数识别递推过程中,如果参数是由当前步及之前步的数据识别得到即为在线参数识别,如果参数是在试验结束后通过所有步数据识别得到即为离线参数识别。在试验过程中对每一步都实时更新为在线参数更新,在试验前统一进行更新为离线参数更新。为了对比不同参数识别与参数更新的组合策略对模型更新试验的影响,找到一种合适的参数识别与更新策略并将其应用到所提出的基于模型更新的子结构拟静力混合试验中,根据参数识别与参数更新方式的不同进行组合得到不同的参数识别与更新策略。不同识别与更新策略的组合见表1。策略I为参数在线识别与在线更新、策略II为参数离线识别与离线更新、策略III为参数在线识别与离线更新。

表1 参数识别与更新策略
3.2 数值验证
针对2层平面钢框架进行拟静力试验数值仿真,计算模型如图3所示。

图3 钢框架计算模型Fig.3 Computation model of steel frame
跨度为6.0 m,2层层高均为3.6 m,梁、柱截面均为热轧H型钢(HW300×300×10×15),底层柱与基础为刚接。梁、柱构件采用基于柔度的非线性梁柱单元,每个单元取3个Gauss-Lobatto积分点,截面为纤维截面。在对截面进行纤维单元定义时,为保证试验精度且快速完成计算,分别沿局部坐标系的两个方向对截面进行划分,沿长度方向划分20个子区域,沿宽度方向划分2个子区域。钢材纤维的本构模型选择单轴Giuffré-Menegotto-Pinto(Steel02)模型,模型参数为钢材的屈服强度fy、弹性模量E和硬化系数b。模型参数的真实值和初始值取值,见表2[10]。表中,未列的材料本构模型参数在建模时采用OpenSees的推荐值。

表2 钢材的本构模型参数
将底层框架柱的一半作为物理子结构,物理子结构的截面形式、单元选择、截面划分等与整体结构数值模型中的框架柱相同。物理子结构采用OpenSees进行模拟,材料本构模型参数采用参数真实值。将模型参数采用真实值的全结构拟静力试验数值仿真即采用真实值的OpenSees数值分析所得到的结果作为参考解来与在线模型更新拟静力试验数值仿真所得到的结果进行对比。全结构拟静力试验数值仿真和全结构在线模型更新拟静力试验数值仿真均在钢框架顶点采用由位移控制的低周往复加载方法进行水平位移加载,其加载制度如图4所示。往复位移加载幅值分别为层间位移角0.01、0.02、0.03、0.04,每级位移往复加载两圈。

图4 加载制度Fig.4 Loading protocol
为模拟真实的物理试验过程,采用均值为零的随机数作为物理子结构的观测噪声,UKF算法中UT变换的采样点参数为α=0.5,β=2和κ=0。初始状态协方差矩阵为P0=q2(xt-x0)(xt-x0)T,xt和x0分别为本构模型参数的真实值和初始值,参数q为调节初始状态协方差矩阵大小的自由参数,q取0.02。观测噪声协方差矩阵R=0.4,协方差矩阵P和R的单位与cm、kN和s相一致[11-12]。
3.3 结果分析
三种识别更新策略对模型参数钢材屈服强度fy、弹性模量E和硬化系数b的识别结果,见表3。由表3可以看出,策略II中参数离线识别的识别效果要优于策略Ⅰ、III中的参数在线识别效果。钢材屈服强度fy、弹性模量E和硬化系数b的识别相对误差分别降低78.9%、77.8%和78.8%。

表3 三种更新策略参数识别结果
三种识别更新策略的滞回曲线与参考值对比,如图5所示。由图5可以看出,策略Ⅱ的滞回曲线与参考值吻合的最好,其次是策略Ⅲ。由于策略Ⅰ需要在线更新材料本构模型参数,参数收敛过程前期的参数波动较大导致其滞回曲线最初的几个滞回环和参考值相差较大,而策略Ⅲ本质上相当于策略Ⅰ的发展,仅通过调整参数更新方式就使得试验结果有了较大改观,由此可见,参数更新方式的选择对试验结果有着很大影响,在今后的模型更新试验中不仅需要选择参数识别方式,同时也要选择参数更新方式。通过比较策略Ⅱ和策略Ⅲ的结果发现选用参数离线识别所得到的材料本构模型参数由于受历史加载路径影响小、结构非线性影响小、因此更稳定,使用这样的参数识别值进行参数更新所得到的结果更加精确。

图5 滞回曲线对比Fig.5 Comparison of hysteresis curves
三种识别更新策略的恢复力时程曲线对比,如图6所示。结果同样支持上述结论,其中策略Ⅰ的恢复力时程曲线与参考值恢复力时程曲线间的均方根误差RMSE为15.686%;策略Ⅱ的恢复力时程曲线与参考值恢复力时程曲线间的均方根误差RMSE为1.39%,二者基本完全吻合;而策略Ⅲ的恢复力时程曲线与参考值恢复力时程曲线间的均方根误差RMSE为6.73%,介于策略I与策略II之间。

图6 恢复力曲线对比Fig.6 Comparison of of restoring force curves
4 基于统计的UKF模型更新方法
4.1 方法原理
在模型更新试验中使用UKF进行参数识别时,不能保证每一次的识别结果都很理想,常出现参数不收敛,识别所得到的结果与真实值偏差过大,参数收敛速度慢,参数识别过程中前期波动较大等问题。
为了解决以上问题,从算法的本质出发提出一种基于统计的UKF模型更新方法。该方法并没有对UKF算法本身修改,而是通过改变UKF的使用方法提高参数识别结果的精度及试验结果的可靠性。基于统计的UKF模型更新方法是将算法多次运行结果进行统计得到参数的统计值,利用统计值更新参数初始猜测值,最后对整体结构再进行一次分析得到最终的试验结果。基于统计的UKF模型更新方法思想可以表示为
(1)
式中:n——统计次数;
Ssam——基于单次样本的参数识别值;
Ssta——经过n次统计参数识别值。
4.2 数值验证
以图3所示的钢框架为例展示使用基于统计的UKF模型更新方法后参数的识别结果及拟静力试验结果。调整初始状态协方差矩阵P0的自由参数q为0.069,其他如加载制度、计算模型及本构模型参数真实值等均不变。
由于钢材弹性模量E和硬化系数b的参数变化趋势与屈服强度fy的变化趋势相似,因此,以屈服强度fy为例说明参数识别值的变化过程。fy的参数识别结果,如图7所示。经过50次运行并将每一次结果进行统计,即将50次的识别结果进行平均后同真实值相比,在经历过短暂的初始值向真实值波动收敛的过程后,最终二者基本吻合。从图中单次样本值为50次的运行结果可以看到,如果取其中某一次样本作为最终识别结果,会导致识别结果同真实值之间存在较大的误差。
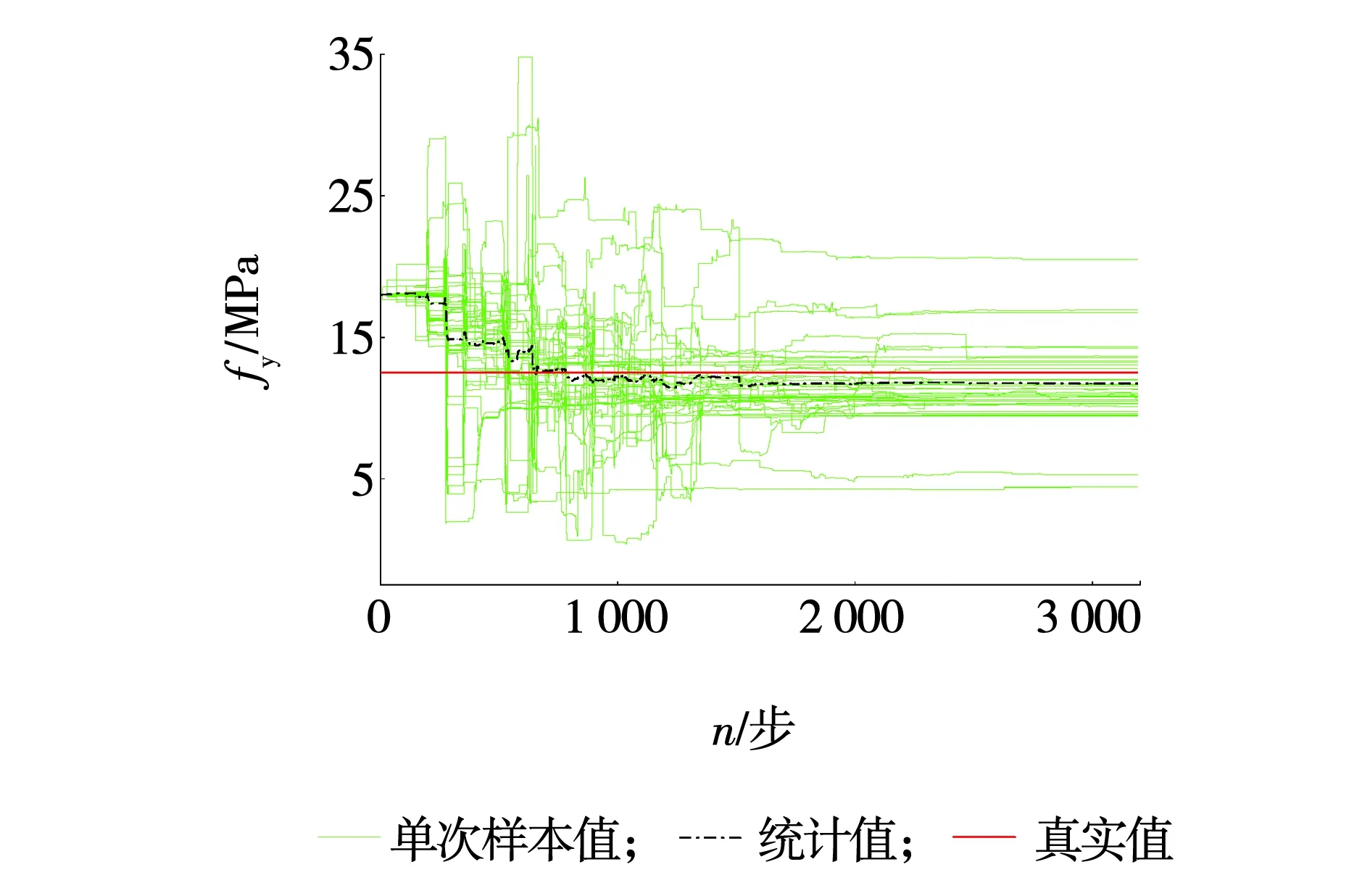
图7 参数fy统计值(q=0.069)Fig.7 Statistical value of parameter fy with q=0.069
钢材屈服强度fy、弹性模量E和硬化系数b的最终统计值识别结果,见表4。由表4可以看出,基于统计的模型更新方法参数识别结果同参数真实值之间的误差较单次样本的误差有了较大的提高。同时也可以发现相较于其他两个模型参数,钢材硬化系数b的识别效果比较一般。这是由于识别效果和真实值与初始猜测值之间的初始误差有关。钢材屈服强度fy、弹性模量E和硬化系数b的真实值与初始猜测值之间的初始误差分别为44%、21%和200%,硬化系数b的初始误差同另外两个参数相比要高出许多,因此,参数识别结果相较于初始误差而言已非常接近真实值。这样设置初始猜测值的原因是钢材屈服强度fy和弹性模量E主要控制材料弹性阶段的本构关系,人们对其认识的较为深刻,并且本身数值较大更容易设置到一个同参数真实值比较相近的初始猜测值。而对于控制材料弹塑性阶段的本构模型参数钢材硬化系数b的先验认识比较少并且其本身的数值较小,在设置初始猜测值时容易引入较大的误差。

表4 最终模型参数识别统计值结果(q=0.069)
基于统计的UKF模型更新方法的各个模型参数识别结果同参数真实值之间的相对误差RE变化过程如图8所示。可以看出,各个识别参数的相对误差RE随运行步数的增加而大幅度下降。基于不同运行次数的参数fy统计值变化过程如图9所示。从图9可以发现,随着统计次数的增加最终的统计值逐渐逼近参数的真实值,说明随着统计次数的增加最终的参数识别结果将会无限趋近于真实值。

图8 参数识别值相对误差Fig.8 Relative errors of parameter identification values

图9 不同统计次数参数fy识别值Fig.9 Identification results of parameter fy under different statistical times
将运行50次参数识别结果进行统计,然后将参数统计值作为最终识别值更新策略Ⅱ型拟静力试验算例中的参数初始值,所得到的恢复力时程曲线与参考值的恢复力时程曲线对比,如图10所示。采用参数统计值的策略Ⅱ型拟静力试验的恢复力时程曲线与参考值恢复力时程曲线之间的均方根误差RMSE为5.79%。

图10 采用统计值的策略Ⅱ型拟静力试验恢复力时程曲线Fig.10 Restoring force curves of type Ⅱ pseudo-static test based on statistical strategy
采用参数统计值的策略Ⅱ型拟静力试验非线性分析所得到的滞回曲线与参考值的滞回曲线对比,如图11所示。从图11可以看出,二者吻合较好,除滞回曲线边缘处稍有差异外,其余部分几乎完全吻合。

图11 采用统计值的策略Ⅱ型拟静力试验滞回曲线Fig.11 Hysteretic curves of type Ⅱ pseudo-static test using statistical strategy
由图10、11可见,采用基于统计的UKF模型更新方法所得到的参数最终统计值和参数真实值之间吻合较好,利用参数最终统计值离线更新参数初始猜测值所得到的试验结果精度更高,可靠性更好,避免了使用UKF进行参数识别结果随机性较大对试验结果的不利影响。
5 结 论
为解决传统拟静力试验无法获得整体结构抗震性能的问题,提出了基于模型更新的子结构拟静力混合试验方法,以2层钢框架为例,探讨了新型拟静力试验方法的有效性。
(1)将子结构概念与模型更新技术引入拟静力试验,通过对整体结构拟静力分析获得物理子结构的准确加载命令,考虑了试验对象与结构其它部分之间“耦合作用”的影响。
(2)对在线及离线参数识别和模型更新策略进行分析,找到最优模型更新方式为离线识别离线更新。
(3)提出基于统计的UKF模型更新方法,通过对算法多次运行得到的参数识别结果进行统计能够降低参数识别结果的随机性,参数识别结果的精度随统计次数的增加而提高,从而提高拟静力试验精度。
猜你喜欢
防爆电机(2022年1期)2022-02-16
科技信息·学术版(2021年18期)2021-10-25
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年4期)2020-12-25
灾害学(2018年2期)2018-04-12
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
小型内燃机与车辆技术(2015年4期)2015-10-22
体育科学研究(2015年5期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
地下水(2013年1期)2013-12-14