基于随机模型预测控制的卫星编队重构
2023-09-20 11:20周旭艳涂海燕
计算机仿真 2023年8期
周旭艳,涂海燕,李 彬
(1. 四川大学电气工程学院,四川 成都 610000;2. 四川大学空天科学与工程学院,四川 成都 610000)
1 引言
多卫星编队飞行是未来许多空间科学任务的一项有利技术,因其具有更高的灵活性、更高的可靠性和更低的成本而备受关注[1]。编队重构是卫星编队系统的关键技术之一,也是其区别于传统单颗卫星的重要特征。根据卫星编队飞行任务的不同需要,通过重构编队几何结构,将卫星从当前编队移动到期望的编队[4]。例如,当某一颗卫星失败或编队需要更新有效载荷时,可以通过编队重构来补充新的卫星。因此,对编队卫星重构控制的研究对于卫星编队飞行的实际应用具有重要意义。
在编队重构过程中,控制系统不仅要保证卫星准确地移动到预定位置,且要满足各种约束条件,如推力约束和避障约束。非线性最优控制[5,6],鲁棒控制[7],滑模控制[8]和凸优化[9]被广泛应用于解决重构问题。文献[10,11]应用最优控制理论和排列组合原理,在深空探测中进行了卫星编队重构研究。文献[12]以燃料消耗量和过渡时间为性能指标,利用凸优化理论设计编队重构轨道过渡策略。在文献[13]中,将状态相关Riccati方程(SDRE)技术应用于编队重构与维护问题的非线性控制器设计中。文献[14]提出了一种基于线性矩阵不等式(LMI)的卫星编队重构动态二次最优(DQO)输出反馈控制器。然而,卫星编队重构过程中存在推力、避障等诸多约束条件,可能导致实际系统的控制性能不佳,上述文献中均未考虑约束条件。
模型预测控制(Model predictive control, MPC)是近年来在航天航空领域广泛应用的一种反馈控制策略,它既能处理线性和非线性目标,又能考虑稳定性、性能优化有约束等不同的要求[2,15-26]。其机理是在考虑系统动力学、目标函数和约束条件的情况下,通过在每个采样时刻反复求解一个在线优化问题,得到最优的控制行为。文献[2]提出了一种具有推力约束的卫星编队重构控制的非线性滚动控制方案。卫星编队飞行的空间环境十分复杂,如太阳风影响、推进器的不确定性、低轨道大气阻力等因素都是不确定的,将这些不确定因素建模为随机噪声。虽然滚动时域方法使MPC具有一定的鲁棒性,但传统的MPC并不是针对系统不确定性而设计的[27]。其鲁棒稳定性的实现要求外部噪声足够小或者状态约束不存在,因此不能满足一般不确定系统控制的要求[16]。
为了系统地解决上述问题,本文提出了一种带状态反馈的随机模型预测控制(SMPC)算法来解决卫星编队重构问题中的扰动和系统不确定性[28]。SMPC利用了噪声的随机特性和统计特性并且能处理多约束类型,通常取惩罚函数的最小期望值,而用到的随机特性通常是噪声的期望和协方差[29]。SMPC一般考虑机会约束(又称概率约束)[30,31],机会约束利用系统不确定性的随机性特征,允许约束在一定程度上被违反,从而达到更好的控制性能。然后利用确定性等价式处理该类随机MPC问题,确定性等价式方法的原理是:一是利用确定性等价式将机会约束转化为确定约束,如当随机噪声的密度分布不可知时,利用切比雪夫不等式将机会约束确定化[32],当随机噪声的密度分布可知时,利用累积概率函数的反函数将机会约束确定化[33];二是将目标函数利用状态的期望和协方差迭代式直接表示为确定形式。因此,随机MPC就转化成了确定MPC问题。
本文在卫星编队重构过程中,考虑了燃油经济性,且考虑了编队卫星随机扰动和各种约束条件的影响,比如推力大小约束和避障约束。与标准的MPC相比,SMPC由于较弱的保守性,消耗燃料更少,且能更快的达到编队重构队形。
2 问题描述
2.1 卫星相对运动动力学
假定主轨道为圆轨道或近圆轨道,用LVLH框架中的一组线性时不变方程描述卫星相对运动动力学[34]

(1)

(2)

(3)



(4)

(5)

(6)


(7)
其中
系统(7)是可控的但是不稳定,将连续系统离散,设置采样时间Ts,那么离散化系统表示如下
x(t+1)=Ax(t)+Bu(t)
(8)
其中
A=eAdTs=
其中,Θ=sin(ω0Ts),Ξ=cos(ω0Ts)。
2.2 约束
在实际工程应用中,卫星的推力是有界的,因此假定卫星的控制输入是连续有限推力,其振幅仅限于:
(9)
设置边界条件约束为每颗卫星在重构过程中的初始和最终状态的数值约束:
x(0)=xinitial
x(T)=xfinal
(10)
其中,xinitial,xfinal分别是卫星的初始和最终状态。


(11)
卫星不能从球体障碍物中穿过,只能从其周围绕过,则任意一颗卫星如果能避开障碍物需要满足如下约束

(12)

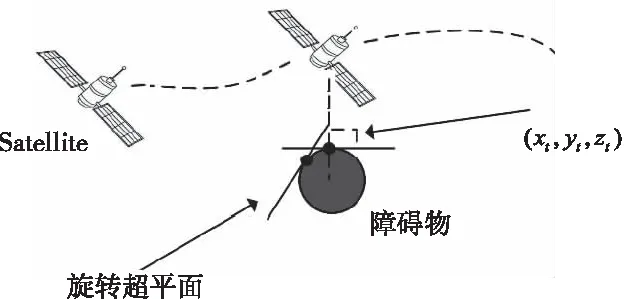
图1 障碍物线性化方法
fc(xt+Δx,yt+Δy,zt+Δz)=fc(xt,yt,zt)+

(13)
其中
可简化上述线性约束为
Adbsxi(t)≤bdbs
(14)

所以,编队飞行中的所有卫星在满足式(14)的约束下都可以实现避障。
2.3 MPC编队重构问题模型
在编队卫星动态重构过程中,必须保证卫星能够满足边界条件约束、控制输入约束和避障约束,并且能克服太空中的随机扰动。为了提高卫星的使用寿命,必须充分考虑到燃料消耗问题。因此,为了提高控制精度,降低编队成本,将卫星实际状态和期望状态之间的误差和能量消耗作为卫星编队重构的性能指标即惩罚函数,则MPC编队重构问题模型如下

-umax≤ui≤umax
Adbsxi(t)≤bdbs
x(0)=xinitial
x(T)=xfinal

3 SMPC 算法
传统的MPC无法满足一般情况下不确定性系统控制的需求。在实际的卫星编队重构系统中,需考虑各种各样的干扰源以及系统不确定性,将编队重构问题表示为一个随机规划问题。则系统(8)可写为如下随机模型
xt+1=Axt+But+Gwt
(15)
定义xt,ut,wt如下:
将上式写为更紧凑的形式则有[37]
Xt+1=Gxxxt+GxuUt+GxwWt
(16)
其中
3.1 状态反馈
令反馈控制律[31]
(17)
则

(18)
其中
在假设的状态反馈下,状态的平均值为

(19)
3.2 目标函数
在SMPC算法中,通常取的是惩罚函数的最小期望值[16]。
(20)


(21)
δUt=K(Gxxδxt+GxwWt)
(22)
可得
δXt=(GxuKGxu+Gxw)δxt+(GxxKGxw+Gxw)Wt
(23)



(24)

(25)
则有

(26)

设置

则目标函数(20)可转化为如下确定性形式

3.3 机会约束
本文考虑机会约束,机会约束允许在一定的置信区间内违反硬约束,从而使约束软化获得更好的控制效果。则控制输入约束(9)可改写成以下联合机会约束的形式[38]

(27)
其中,k=1,2,…,N-1i=1,2,Pr{ψ}代表Ψ的概率,h∈u、umax∈是常向量,表示实数集,ξ∈(0,1)是限制违反约束的概率。利用布尔不等式来确定违反联合机会约束的概率,则有

(28)
则联合机会约束可用以下两个单个机会约束代替

(29)


(30)
显然式(30)、式(31)是非凸的,不方便计算,必须将其转化为凸的形式。文献[31]中描述了一种利用切比雪夫不等式处理机会约束的方法,将其进行了运用,从而将(29)(30)处理为如下形式

(31)

(32)
其中κ∈[0,1]是附加的设计参数,

=E(K(Gxxδxt+Gxwwt)(Gxxδxt+Gxwwt)TKT)
=KMKT
则SMPC编队重构问题模型如下
s.t.:Xt+1=Gxxxt+GxuUt+GxwWt
x(0)=xinitial
x(T)=xfinal
4 仿真结果
采用MATLAB2018b版来进行了仿真,并使用CVX工具箱对控制问题进行了优化,CVX是MATLAB中求解凸优化问题的工具箱。
参考模型由一个圆形轨道上的三颗卫星组成,编队重构任务是编队卫星成员从一字形转换为等腰三角形。将轨道高度设置为850km,则卫星角速度n=0.0255rad/s,控制输入-20≤u≤20,预测时域N=10。权重矩阵Q=diag(103103103102102102),R=2×103I3。障碍物中心坐标为(-30,37,40),半径为10。利用MATLAB进行了800次蒙特卡洛仿真。三颗卫星的初始和期望状态设置见表1。
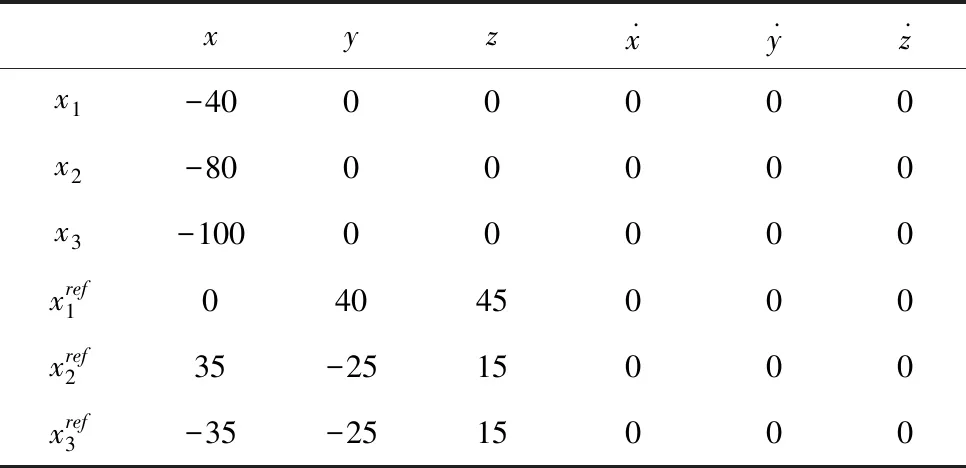
表1 编队卫星成员的初始状态与期望状态
假设障碍物设定为球状,图2和图3分别是考虑避障约束设计下MPC算法和SMPC算法下编队卫星成员的最优三维轨迹,图6和图7是考虑避障约束时编队卫星成员最优轨迹的三维图,结果表明,在式(33)的约束下,所有编队卫星成员都能够避开障碍物。SMPC较MPC弱保守性,需要绕更远的距离躲开障碍物,如图2及图6中的Sat2,这就使得卫星走更远的路程,消耗更多燃料,而SMPC在距离障碍物安全距离范围内尽量轨迹最短。图4和图5分别是不考虑避障约束设计下MPC算法和SMPC算法下编队卫星成员最优二维轨迹,由图可得,编队卫星成员由于没有避障约束撞上障碍物。
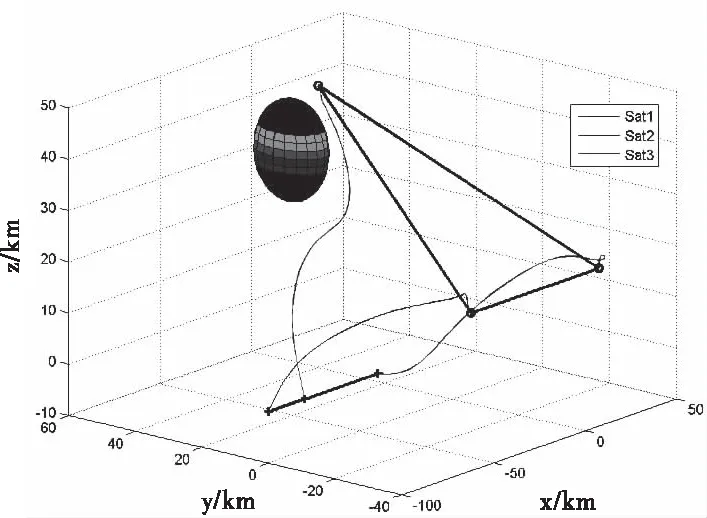
图2 带避障约束的MPC三维最优轨迹
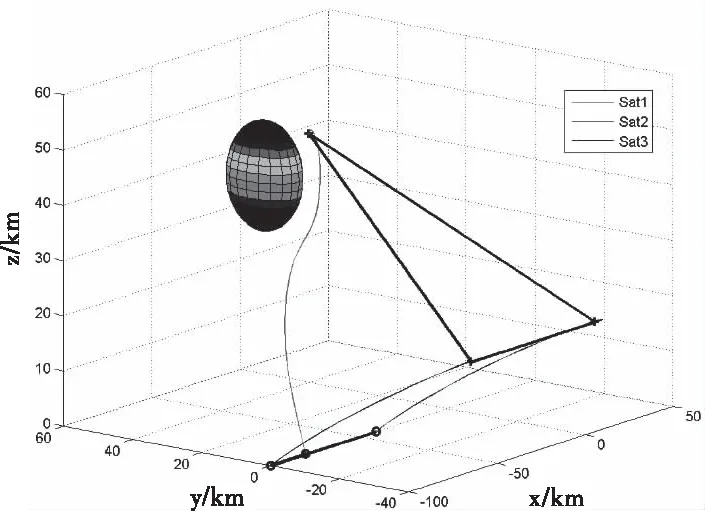
图3 带避障约束的SMPC三维最优轨迹

图4 无避障约束的MPC三维最优轨迹
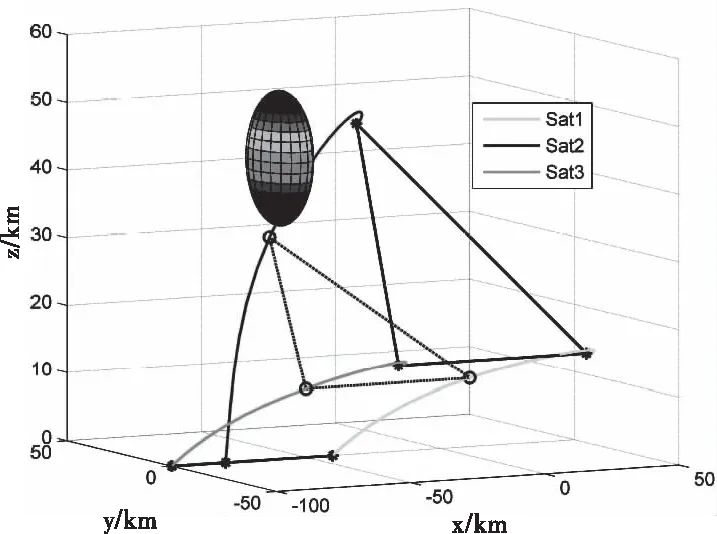
图5 无避障约束的SMPC三维最优轨迹

图6 带避障约束的MPC二维最优轨迹

图7 带避障约束的SMPC三维最优轨迹
图8和图9分别是两种算法下任意两两卫星之间的距离,由图8可得,在MPC算法下,编队卫星成员在40s完成从一字形转换为等腰三角形的编队重构任务;由图9可得,SMPC算法下编队卫星成员在25s时就已完成编队重构任务,结果表明SMPC算法完成编队重构任务的速度比标准MPC快。
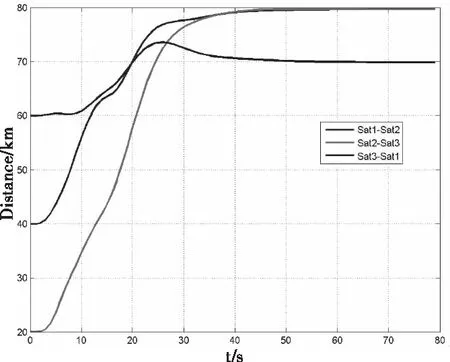
图8 MPC下两两卫星之间距离

图9 SMPC下两两卫星之间距离
图10和图11分别是两种算法下编队卫星成员在(x,y,z)三个方向上控制输入,结果表明SMPC在给定概率下可以违反约束,可以使控制系统得到更好的控制性能,燃油更少且在避障时轨迹更优,而MPC算法则是严格遵守约束。表2是两种算法下编队卫星成员的的燃料消耗结果。

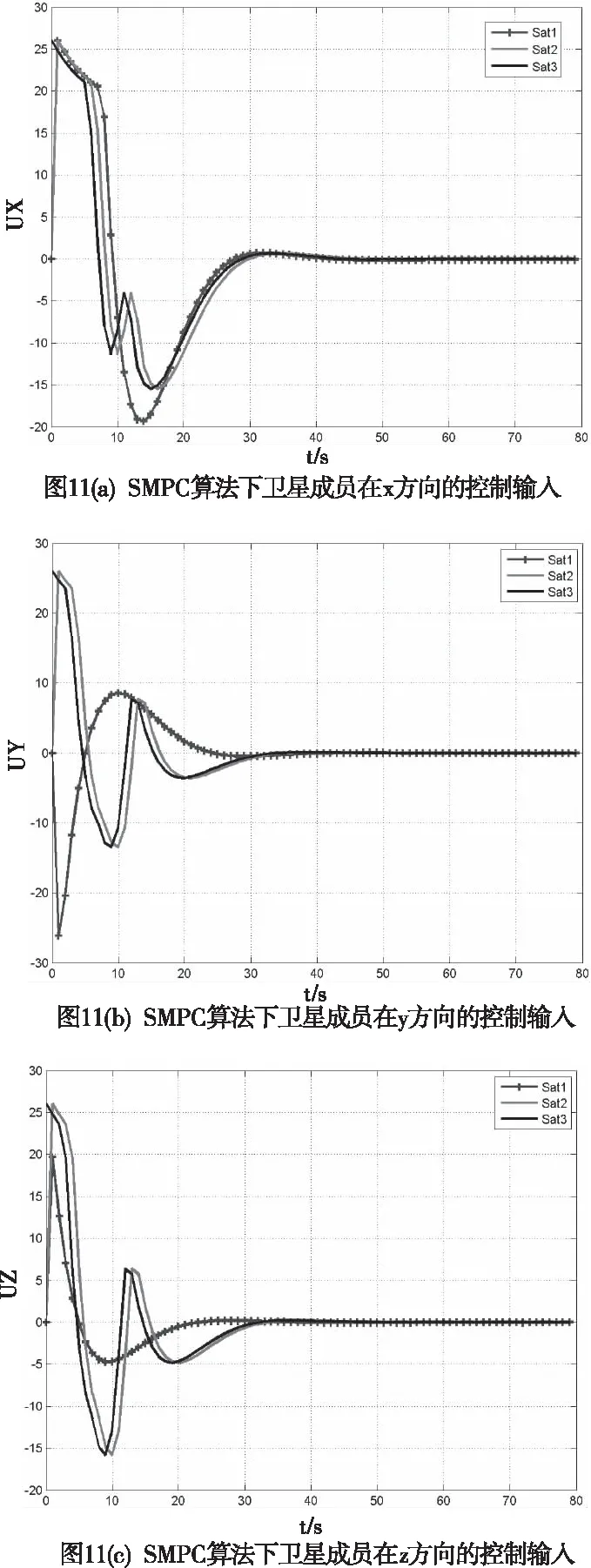
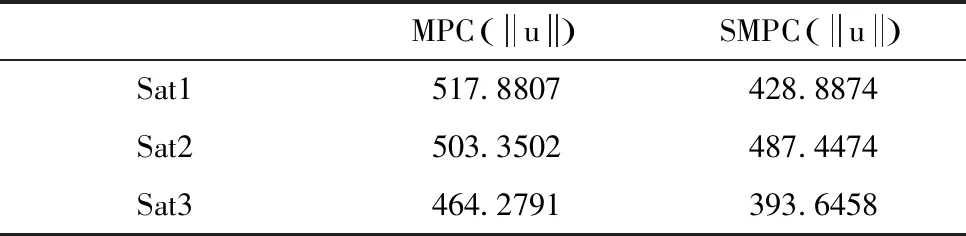
表2 编队卫星成员燃料消耗
5 结论
本文主要研究了存在随机扰动、推力约束、避障约束等情况下的卫星编队重构控制问题,基于具有外部扰动和各种约束条件的Clohessy-Wiltshire方程,提出了一种带有状态反馈的随机模型预测控制器。利用确定性等价式将随机MPC问题转化为确定性MPC问题,并与标准的MPC算法进行了比较。仿真结果表明,SMPC较MPC算法具有更好的控制性能,不仅能处理各种约束,而且具有处理系统不确定性干扰的能力。由于所提出的SMPC算法在设计中考虑了扰动,而基于MPC的方法在设计中不考虑扰动。因此,SMPC较MPC消耗更少的燃料,且SMPC算法能够更快的完成编队重构目标。此外,本文还考虑了障碍物模型的设计,在避障约束下,编队卫星成员都能避开障碍物,这对工程实际具有重要的意义。
猜你喜欢
军事文摘(2023年5期)2023-03-27
加油站服务指南(2021年4期)2021-07-21
数学年刊A辑(中文版)(2020年1期)2020-05-19
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
北京航空航天大学学报(2017年3期)2017-11-23
人生十六七(2015年6期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
城市道桥与防洪(2014年5期)2014-02-27