螺线空间阵性能研究
2023-09-20 06:50李志超胡东森裴雨晴庞业珍刘进
应用声学 2023年5期
李志超 胡东森 裴雨晴 庞业珍 刘进
(中国船舶科学研究中心 无锡 214028)
0 引言
为了准确评估水下装备的声隐身性能,世界各国十分重视水下目标的辐射噪声测试与定位技术,水下测试声阵经历了由单水听器、多水听器线阵再到三维体积阵的发展过程。在辐射噪声测试的早期阶段,常采用单水听器进行测量[1],该方法原理简单、布放便捷,但无法在低信噪比条件下工作,且不具备噪声源定位的能力;二战以后,美、苏等军事强国开始使用多水听器线列阵进行测试,大幅提高了辐射噪声的分析能力,苏联曾使用水平测试阵,美国的QSAM 双阵列测试系统、PSI 测试系统,以及意大利WAAS船载水下噪声测试系统皆是垂直阵;20世纪70年代以来,不断发展的声隐身技术使线阵越来越难以满足测试要求,美、法等发达国家便着手体积阵测试系统的研究,美国曾研制出由1000多个水听器组成的AMFILL透明圆柱阵测试系统。相比于线阵和面阵,圆柱阵的空间对称性好、机械结构简单,且在水平方向上无探测盲区,因此被广泛应用于各类声呐系统中[2],但圆柱阵在水平方向上的指向性函数为贝塞尔函数[3],使用常规波束形成时旁瓣较高,抗干扰能力不足,应用加权类算法又会降低波束形成的稳健性,美国于AUTEC 水声试验场使用双锥阵(Twisted Bi-Cone array,TBCA)[4-5]替代原圆柱阵,现今在东南阿拉斯加试验场(SEAFAC)和大西洋水下测试及评估中心(AUTEC)均使用双锥体积阵。
具有空间稀疏特性的阵列,可利用阵元的非等间隔排列有效抑制空间混叠效应,呈现出较低的旁瓣[6],以提高对声源的定位分析能力。本文参考了美国TBCA 的阵列构造形式,提出了一种螺线空间阵型,螺线结构的阵元空间分布更不规则、稀疏性更强,能够进一步发挥空间稀疏阵列的低旁瓣优势。
1 螺线空间阵模型
1.1 阵元坐标参数
对于如图1 所示的一条高度为H、半径为R、阵元数为M、阵元在垂直方向上等间隔分布的单条螺线阵,各层之间的阵元间距为

图1 螺线阵示意图Fig.1 Schematic diagram of spiral array
各阵元在z轴方向上的坐标可表示为
式(2)中,m表示第m层(共M层),1 表示第一条螺线阵,zm,1的范围在-H/2~H/2之间。
设单条螺线阵在水平方向上共存在K个圆周(每个圆周为2π),则每个阵元所在平面的圆周半径为
每个阵元所在的圆周角度为
则单条螺线阵各阵元的x坐标和y坐标可表示为
将单条螺线阵在圆周方向上进行旋转,得到由N条单螺线阵组成的螺线空间阵,即螺线空间阵共M层N列,如图1(c)所示。
螺线空间阵的每一层上,N个等间隔分布的阵元将周向2π均匀分割为
式(7)中,n表示第n列(根)产生的单螺线阵。
将第1 列(根)单螺线阵的各阵元x坐标和y坐标,围绕轴心,以角度βn进行等间隔逆时针旋转[7],便得到了各列(根)阵元的x坐标和y坐标:
其中,rm,n=rm,1为第m层、n列阵元所在圆周的半径,αm,n=αm,1+βn为第m层、n列阵元的圆周角度。
由于每层阵元的z坐标相同,因此螺线空间阵的z坐标为
1.2 指向性函数
设声波的入射方向与x轴的夹角为θ、与xOy平面的夹角为φ,在柱坐标系下可用单位矢量表示为
螺线空间阵各阵元的位置可表示为
以原点作为参考点,声波到达不同阵元和到达参考点的声程差为
各阵元与参考点的相位差为
式(16)中,k0为波数。
为使阵列的主波束对准观测方向(θ0,φ0),需要对相位进行补偿,即
当θ0=0,φ0=0 时,螺线空间阵的指向性函数为
2 螺线空间阵性能仿真
美国AUTCE 试验场的TBCA 高度7.8 m,半径1.3 m,由12 根线阵组成,每条线阵由40 个间隔为0.2 m 的阵元组成[8],阵元尺度分布图如图2(b)所示。本文的阵列仿真参数以TBCA 为基准,得到同尺度、同层数、同列数的螺线阵和圆柱阵:螺线阵高度H=7.8 m,半径R=1.3 m,层数M=40,列数N=12,圆周数K=2,如图2(a)所示;圆柱阵高度7.8 m,半径1.3 m,由12根垂直阵组成,每根垂直阵由40个阵元等间隔排列,如图2(c)所示。
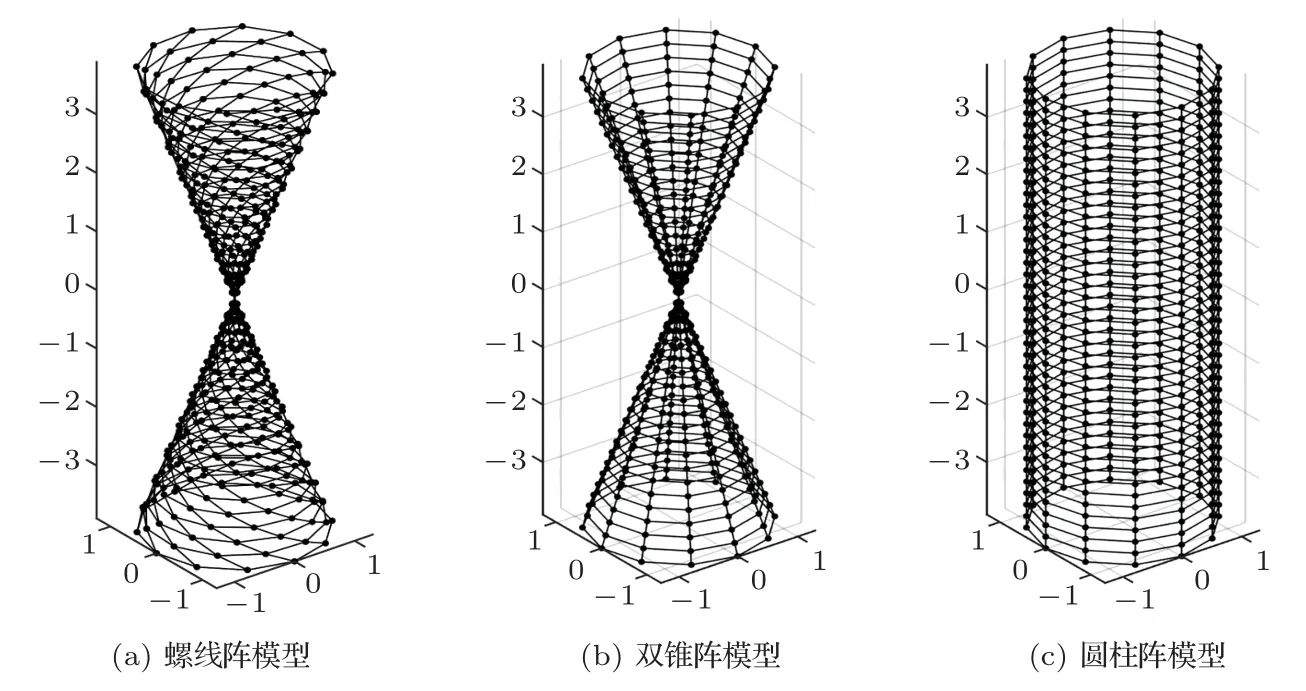
图2 同尺度、同层数、同列数空间阵模型Fig.2 Space array model of the same scale,same layer and same column
2.1 指向性
在2000 Hz、4000 Hz、8000 Hz频率处,3种阵列的空间指向性图如图3~图5所示。
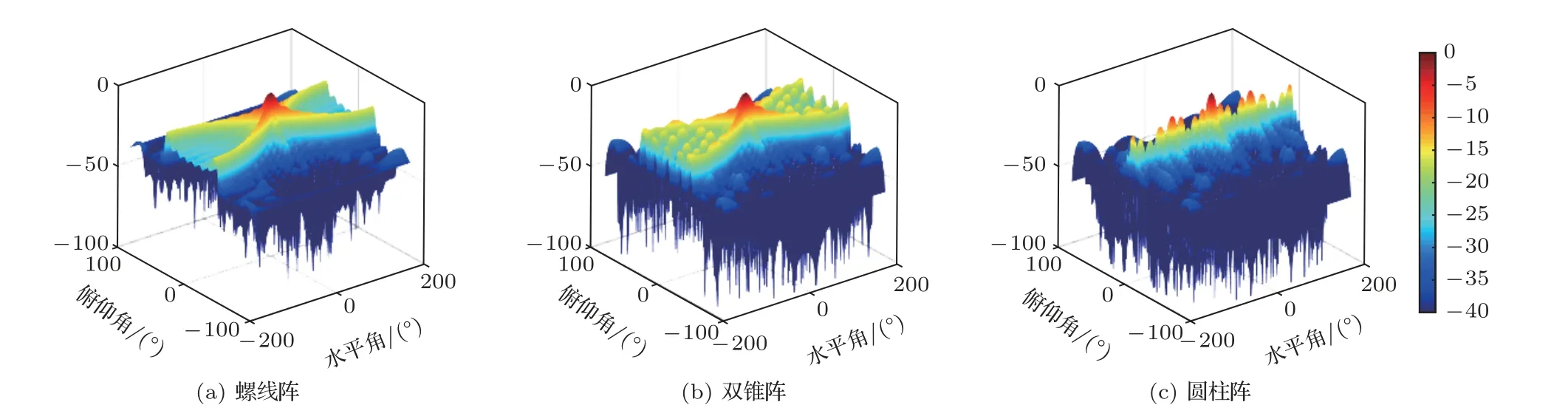
图3 体积阵空间指向性图(2000 Hz)Fig.3 Spatial directivity diagram of volume array (2000 Hz)
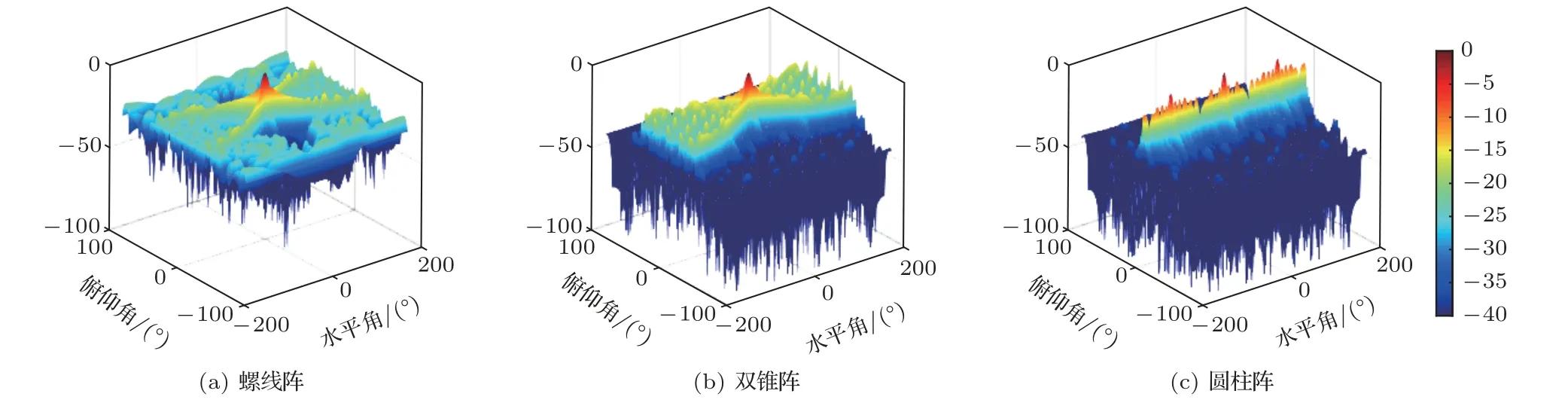
图4 体积阵空间指向性图(4000 Hz)Fig.4 Spatial directivity diagram of volume array (4000 Hz)
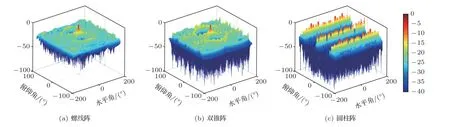
图5 体积阵空间指向性图(8000 Hz)Fig.5 Spatial directivity diagram of volume array (8000 Hz)
3 种体积阵在水平方向上的指向性对比如图6所示。
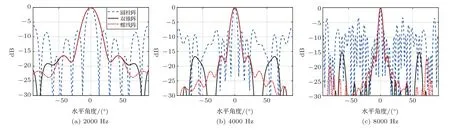
图6 体积阵水平指向性图Fig.6 Horizontal directivity diagram of volume array
不同频率下,3 种体积阵的最大旁瓣高度与主瓣高度比的分贝值(旁瓣级)频率响应曲线如图7所示。
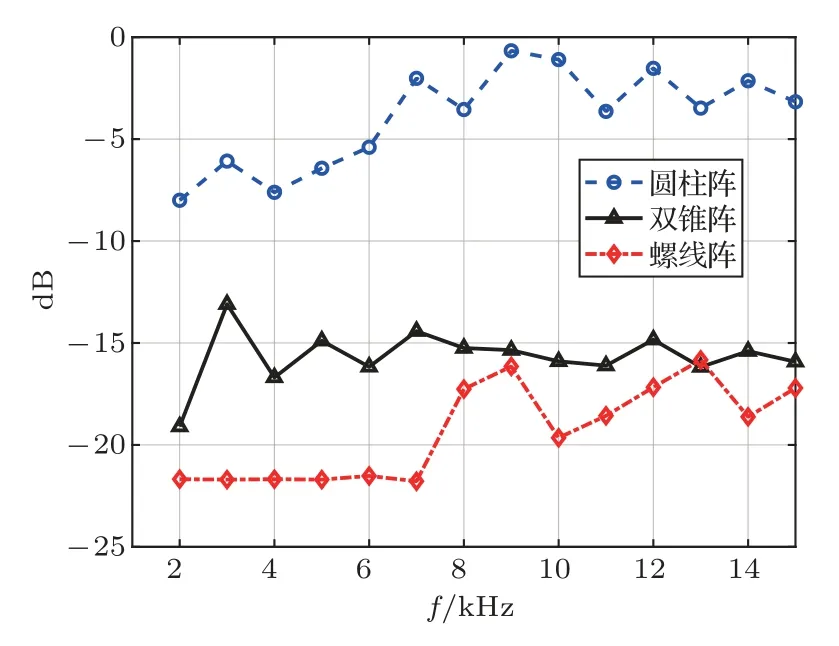
图7 3 种体积阵旁瓣级频响曲线Fig.7 Sidelobe frequency response curves of three volume arrays
在水平方向上,螺线阵拥有最低、最平坦的旁瓣,抗空间定向干扰能力最强;圆柱阵主瓣最窄,相比双锥阵、螺线阵的角分辨力最高,即定向精度最高,但其旁瓣远高于螺线阵和双锥阵;双锥阵的主瓣宽度与螺线阵相同,但其旁瓣高于螺线阵。由于3种体积阵的垂直结构相似,都为等间隔线阵构型,因此垂直指向性基本相同。
2.2 方位估计能力
设水平-25°和40°方向有两束平面波射向阵列,在无背景噪声干扰下,不同频率处阵列的常规波束形成方位估计结果如图8所示。
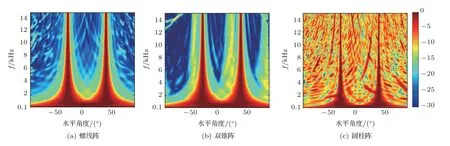
图8 体积阵水平方位估计结果Fig.8 Horizontal azimuth estimation results of volume array
在4000 Hz、6000 Hz、8000 Hz、10000 Hz、12000 Hz 和14000 Hz 频率下的方位估计水平切片图如图9所示。
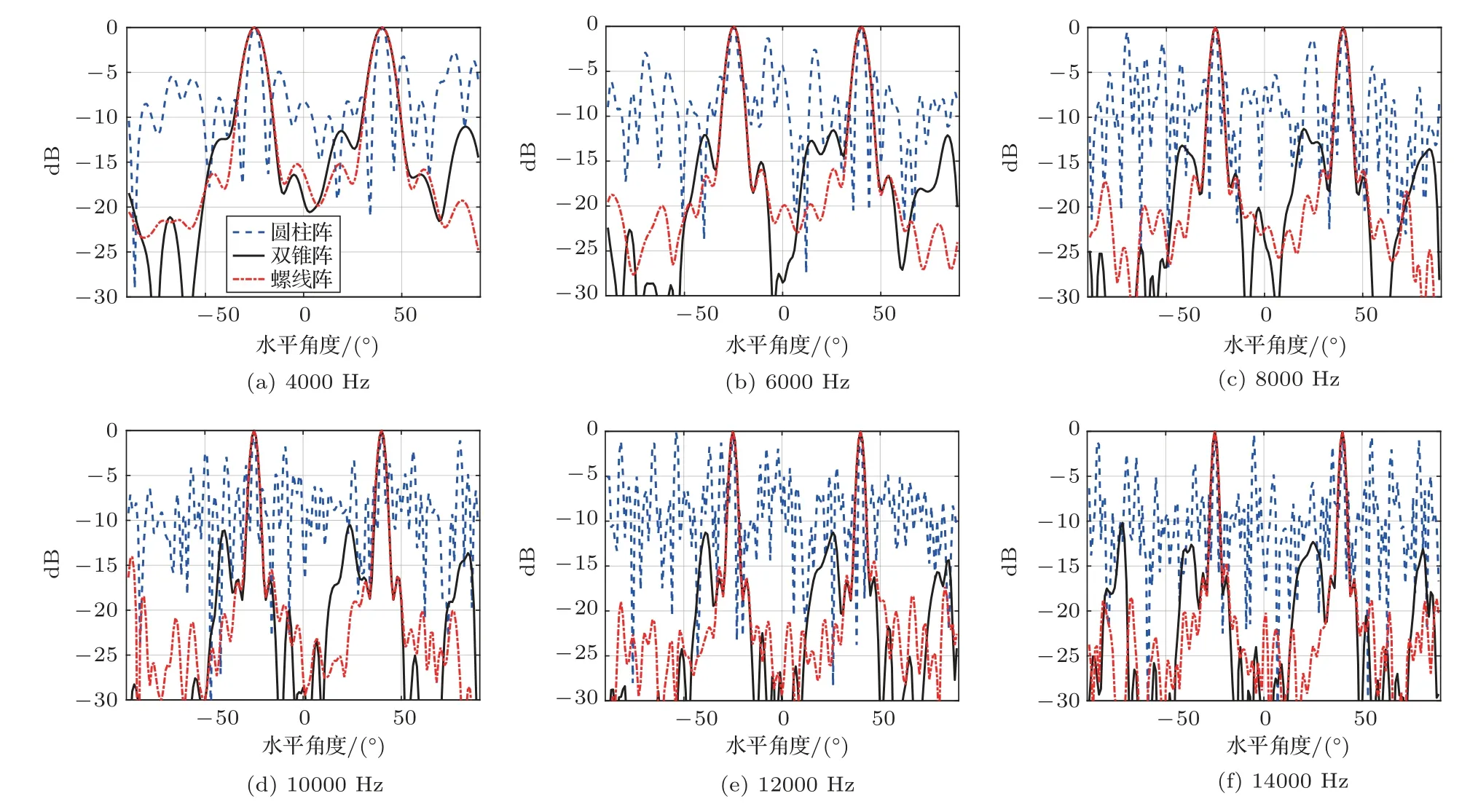
图9 不同频率下的水平方位估计结果Fig.9 Azimuth estimation results at different frequencies
对于两个角度相近的目标,若方位估计谱中二者间的凹陷深度大于3 dB,则视为能够成功分辨两个目标,将阵列在水平方向上能够分辨出的两个等强度目标的最小夹角称为水平角度分辨力。在不同输入信噪比(Signal-to-noise ratio,SNR)的各向均匀同性噪声干扰下,3 种体积阵的最高伪峰高度和水平角度分辨力分别如图10和图11所示。
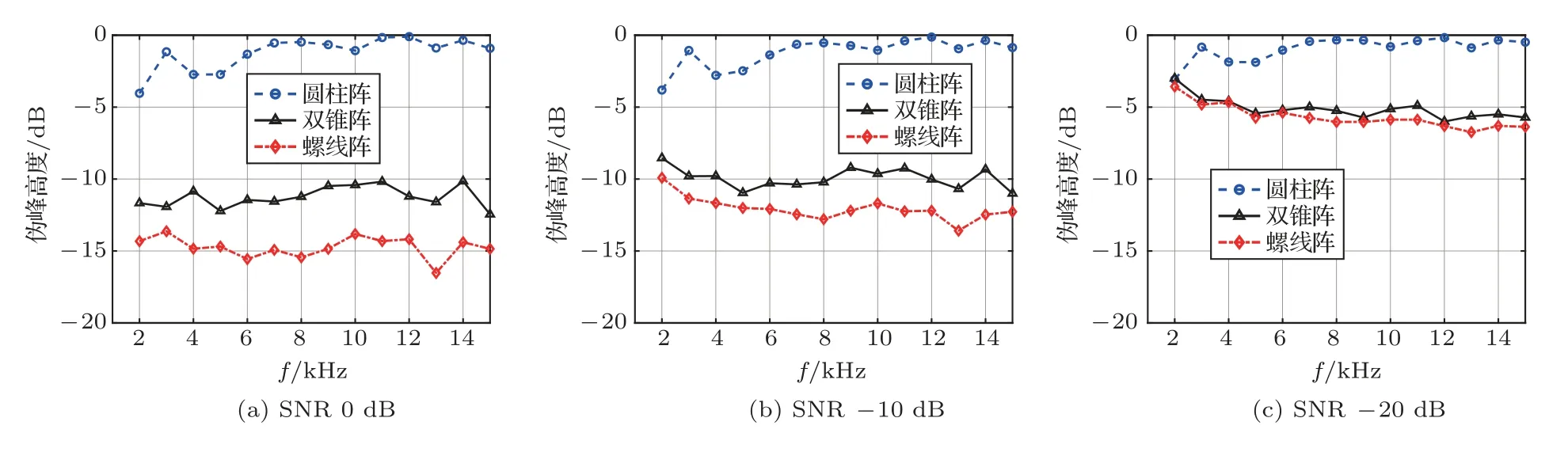
图10 不同信噪比下最高伪峰高度的频响曲线Fig.10 Frequency response curve of the highest false peak height under different signal-to-noise ratios

图11 不同信噪比下水平角度分辨力的频响曲线Fig.11 Frequency response curve of horizontal angle resolution under different signal-to-noise ratios
随着信噪比的降低,伪峰会逐渐淹没在噪声的背景高度中。对于双锥阵和螺线阵而言,二者的伪峰本就较低,因此噪声的背景高度基本等同于最高伪峰高度,呈现出伪峰高度频响曲线随信噪比的降低而升高的趋势;对于圆柱阵而言,其最高伪峰高度本就很高,噪声背景高度仍无法将其淹没,因此其伪峰高度频响曲线基本不随信噪比变化。
图10 表明:双锥阵、螺线阵的伪峰高度显著低于圆柱阵,例如在SNR=0 dB 的情况下,双锥阵与螺线阵的最高伪峰高度分别约在-10 dB和-15 dB,而圆柱阵平均在-2 dB。图11 表明:螺线阵与双锥阵的角度分辨力相近,圆柱阵相对这两种阵型具有最高的角度分辨力,在14000 Hz 高频下也具有较好的方位估计效果。
2.3 空间阵增益
阵增益为阵列获得的信噪比增益,其表达式为
设阵列各阵元的加权向量为w,将阵列主波束对准观测方向,则式(20)化为
式(21)中,ρn为J ×J(J为阵元个数)的噪声协方差矩阵,大小与噪声的空间相关性有关。
对于各向均匀同性噪声而言,阵增益的表达式为[9]
式(22)中,[lij]J×J为J ×J的阵元间距矩阵。
可见,阵增益与阵元个数J、波长λ、阵元间距矩阵[l]有关。当频率f较高,即λ·[lij]J×J较小时,
此时,各阵元间的噪声互不相关,各向均匀同性噪声场下的阵增益与高斯白噪声下的阵增益等价,为
在各向均匀同性噪声场下,3 种体积阵的阵增益随频率的变化如图12所示。
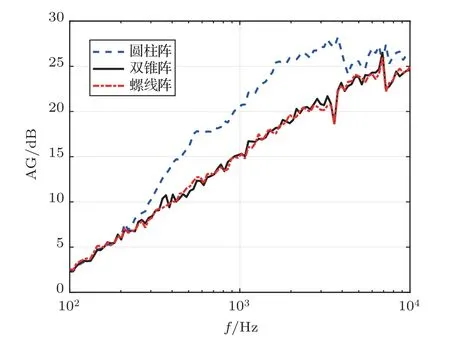
图12 体积阵阵增益的频响曲线Fig.12 Frequency response curve of array gain of a volume array
各向均匀同性噪声场下,阵增益与指向性指数等价。在300 Hz 以下频段,3 种体积阵的阵间距都远小于波长,各阵元接收到的噪声相关性均较强,仅空间跨度较大的边缘位置处水听器为有效阵元,因此三者的阵增益基本相同;在300~4000 Hz 频段,由于圆柱阵在水平方向上每层的线度(平均阵间距)更大、各阵元接收到的噪声空间相关性更弱,即有效阵元数更多,螺线阵在水平尺度上有所收缩,水平孔径小于圆柱阵,因此圆柱阵增益高于螺线阵和双锥阵;在4000 Hz 以上频段,阵列各阵元接收到的噪声可视为相互独立,3 种阵体积阵的空间阵增益都趋近于10 lgJ。
3 结论
螺线空间阵具有更强的空间稀疏特性,在指向性主瓣宽度与双锥阵相同的情况下旁瓣更低、更平坦,抗定向干扰能力更强。对目标进行方位估计时,螺线阵的伪峰高度最低,定位效果优于双锥阵和圆柱阵。由于螺线空间阵在水平尺度上有所收缩,水平线度小于圆柱阵,因此在中高频段空间阵增益低于圆柱阵。但螺线阵的结构最复杂、阵元坐标表达式最不直观,在实际应用中可能会出现姿态修正困难、对布放偏差敏感的问题。
猜你喜欢
舰船科学技术(2023年11期)2023-07-22
实验室研究与探索(2022年5期)2022-09-01
东北大学学报(自然科学版)(2020年6期)2020-06-16
新高考·高二数学(2019年1期)2019-06-28
新高考·高一数学(2019年1期)2019-04-15
新世纪智能(数学备考)(2019年1期)2019-04-10
人大建设(2018年11期)2019-01-31
测控技术(2018年1期)2018-11-25
化工装备技术(2017年4期)2017-09-01
新课程研究(2016年21期)2016-02-28