考虑局部块体预埋槽道的盾构隧道BIM设计程序开发
2023-10-17 12:18齐成龙
结构工程师 2023年4期
齐成龙
(中国铁路设计集团有限公司,天津 300308)
0 引言
截至2020 年年底,我国投入运营的铁路隧道共16 798座,总长约19 630 km,其中,高速铁路隧道超过5 500 km,我国已成为世界上运营铁路隧道数量最多、里程最长、服役环境最复杂的国家。
接触网作为动力供给线,是电气化铁路安全良好运营的生命线,以往多采用后植螺栓的方法安装,该方法存在材质易腐蚀、人工机械打孔易造成管片不可逆损伤、施工效率低下、环境污染严重等缺陷:21 世纪初引入中国的预埋槽道技术很好地解决了上述问题,地铁项目一般采用全环预埋的方式设置槽道,但是对于铁路盾构隧道而言,由于结构尺寸大,全环预埋会造成巨大的工程浪费,因此一般采用局部块体预埋的方式[1-2]。
竣工状态的管片环空间位姿受盾构机油缸行程、现场地质状况、盾尾钢壳构造尺寸等众多因素的影响,因此,在传统的施工图设计阶段一般不提供管片环位姿数据。但是在BIM设计阶段需要精确的管片环定位信息,以满足三维展示、空间干涉分析、向运维交付等需求,在此背景下,需要在BIM 设计阶段增加准确判定各环相对位置关系、确定预埋槽道环布置方式的过程,实现一定程度上的正向设计。
目前,许多学者在以管片排版为核心的盾构隧道BIM 设计方面开展了研究,并积累了丰富的工程应用成果[3-4]。赵云辉等[5]结合北京地铁昌平线盾构区间建模需求,研发了基于Revit 平台的盾构区间管片排版系统,通过输入地铁线路平纵曲线参数,设置管片参数,实现了盾构区间管片在Revit 平台下的快速排版建模。程雨秋等[6]采用Bentley MicroStation 基础平台方案,开发出一套可适用于不同隧道半径、衬砌厚度、分块模式、拼装方式、螺栓形式、环纵缝接头等的盾构隧道管片BIM 设计系统。该系统具备一键参数化建模、生成cell 文件,并实现一键放置大量管片等功能,在深圳地铁十六号线等项目中成功应用。李永明等[7]基于达索软件平台,通过盾构管片参数换算,建立楔形盾构隧道管片环参数化标准模型库,设计函数运算关系并编辑EKL 脚本,以局部坐标系转换的方式实现具备错缝拼装、剔除封顶块向下以及筛选与曲线距离最小试算点功能的隧道曲线参数化拟合,实现盾构隧道自动排版。
以上研究成果通过多层次开发手段,基于Revit,Bentley,Dassault等主流BIM 平台,发挥BIM软件的参数化设计功能,实现了一定程度上的盾构管片三维空间排布设计。但这些研究成果普遍存在自动化程度不足的缺陷,且不适用于局部块体预埋槽道盾构隧道。本文对局部块体预埋槽道的管片环空间位姿最优化筛选算法进行了研究,并基于Dassault/CAA 架构开发盾构隧道BIM 设计程序,通过输入铁路空间线位和管片布置参数表格,实现了盾构隧道在Dassault 平台下的参数化、自动化快速BIM设计。
1 考虑局部块体预埋槽道的盾构管片空间排布算法研究
1.1 常规通用管片环最优化位姿筛选原理
1.1.1 管片空间相对旋转
管片环是楔形几何体,假设在其初始端面、前进端面各有一个坐标系。对于管片i的初始端面坐标系Αbi而言,其X轴指向封顶块K,Z轴垂直初始端平面向内;对于管片i的前进端面坐标系Αfi而言,其X轴指向封顶块K,Z轴垂直于初始端平面向外。两坐标系Y轴均根据右手定则确定。
管片i与管片i+1 作为相邻结构,在没有发生相对旋转的情况下,其位置关系如图1 所示,由于相邻管片环端面必须密贴,管片i的前进端面坐标系Αfi与管片i+1 的初始端面坐标系Αbi+1重合。在管片i已经完成现场拼装的前提下,管片i+1 通过绕其初始端面坐标系Αbi+1的Z轴旋转,实现与管片i之间的相对位置关系变化。

图1 相邻管片环未发生相对旋转时的端面坐标系示意图Fig.1 Diagram of end face axis systems for segments without relative rotation
1.1.2 从可用旋转序列中筛选最终相对转角
盾构隧道的理论设计轴线为光滑曲线,而实际施工中盾构隧道轴线为各通用管片环轴线组成的连续折线,盾构管片空间排布的原则即是在各管片环的可用相对旋转角度序列内选择最优值,使得隧道理论设计轴线与成型隧道折线线型最接近。根据《盾构法隧道施工及验收规范》(GB 50446—2017)9.3条对拼装质量的控制要求,管片轴线平面位置和轴线高程允许偏差均为±70 mm。
如图1 所示,当管片i完成现场拼装以后,管片i+1 根据可用的相对旋转角度序列{α1,α2,α3,α4,α5,…},绕其初始端面坐标系Αbi+1的Z轴旋转,得到与每个相对转角对应的前进端面坐标系Αfi+1,继而生成与相对旋转角度序列数目相同的前进端面坐标系原点作为试算点。
如图2 所示,管片i+1 初始端面坐标系Αbi+1的原点与所有试算点构成一个圆锥形,在所有试算点中选择一个与隧道理论中心线最接近的,其夹角就是管片环i+1 相对于管片环i的旋转角度。

图2 初始端面坐标系、隧道理论中心线与试算点几何关系简图Fig.2 Geometrical relationship among initial end axis system,theoretical centerline and trial points
1.2 考虑预埋槽道布置要求的管片环位姿筛选
1.2.1 管片环可用相对旋转角度的约束
理论上讲,在没有任何约束的情况下,0~360°范围内的任何一个角度都可以作为相邻管片环的相对旋转角度,但是相邻管片环之间以及管片环自身需要满足四个层级的约束条件[8-9]:①纵向螺栓孔对齐;②管片错缝拼接;③封顶块在下方布置区域的限制;④预埋槽道环对管片布置的限制。据此确定管片环的可用相对旋转角度序列。
1.2.2 管片环的相对及绝对旋转位置
为了清晰表达当前管片环对前一环的相对旋转位置,以及当前环的绝对旋转位置,建立用于表达管片环旋转位置的X′Y′参考坐标系,以及XY绝对坐标系,如图3 所示。可以看出,管片在环向被等间距的纵向螺栓孔分割,相邻纵向螺栓构成的环向“分区”表达了最小的可用相对转角,相邻管片环之间的旋转角度只能是该环向“分区”的整数倍。
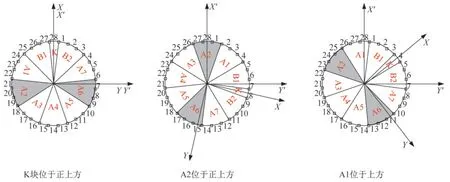
图3 参考坐标系、绝对坐标系、环向分区之间的关系图示Fig.3 Diagram of the relation among reference axis system,absolute axis system and partition on the ring
在X′Y′参考坐标系中,X′指向正上方,各分区相对于X′Y′轴位置固定。XY绝对坐标系随管片环转动,与各块体的相对关系固定。
“当前管片环位于正上方的块体编号”是管片空间排布过程中的一个重要计算参数,只有当某块体位于上方并完全被X′轴平分时,该块体才可以被称为“位于当前管片环正上方”。图3 以K 块分区数目为1、包含28个纵向螺栓的管片环为例,描述了管片环的三种旋转状态。
本示例管片环包含K,A1—A7,B1,B2 共10个块体,其中A2,A6 为预埋槽道块。图示三种情况分别表达K 块位于28、8、4 号分区位置,对于前两种情况来说,位于正上方的块体分别是K,A2,第三种情况由于A1没有被X′轴平分,不存在位于正上方的块体。
1.3 管片环旋转状态存储
在实际工程项目中,对于普通环,总能生成考虑前三项约束条件的非空转角序列。由于在一个管片环当中可用于布置预埋槽道的块体数量较少,以前述示例管片为例,其包含10 个块体,但是只有A2,A6 这2 个块体可以布置预埋槽道,增加第四项约束条件后,对于预埋槽道环,可用转角序列有可能为空。也就是说,当前管片环的下一环,其可用旋转状态数目可能为0 或者多个,当前管片环的前一环,有一个已知的旋转状态,因此,将盾构隧道相邻连续各管片环的旋转状态表达为图4的树形结构。
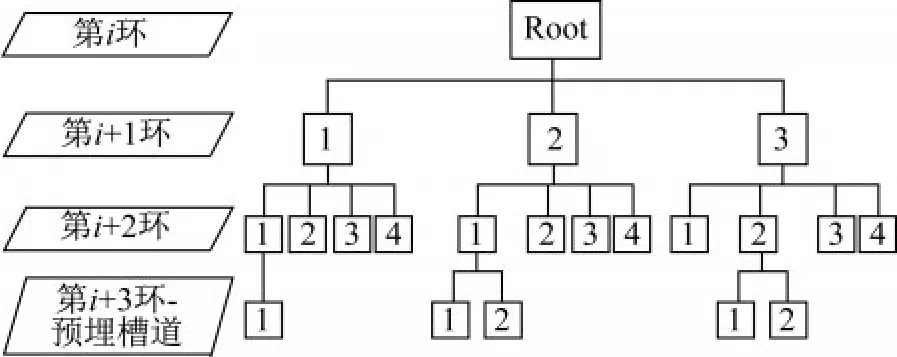
图4 用于表达相邻连续管片环旋转状态的树形数据结构Fig.4 Tree data structure which is used to express rotation status of adjacent continuous segments
将上述树形数据结构与常规通用管片环最优化位姿筛选原理相结合,在Dassault/CAA 架构下,开发盾构隧道BIM设计程序。
2 基于Dassault/CAA 架构的BIM 设计程序开发
2.1 获取既有树形结构的末端节点容器
本函数的作用是从ipRootNode 根节点出发,找到树形结构末端的所有节点并存储到vector
SearchEndNodes()函数从树形结构根节点所在的层级依次向下一级节点递阶搜索,直至找到所需的末端节点,最后将搜索结果加入vector
2.2 从既有树形结构中获取由根节点到末端节点的完整路径
本函数以树形结构中某个末端枝节点为输入数据,获取由根节点到末端节点的完整路径。在tNode 结构体类型当中,pFatherNode 成员变量作为一个指针,指向当前节点的父节点,本函数通过递归的方式,借助结构体内部各成员变量的指针关系实现了上述路径生成功能。
2.3 由根节点逐渐生长出满足末端节点预埋槽道要求的树形结构
前面两个函数的功能是对已有结构树进行数据查找,vector
本函数流程如图5 所示,根据输入参数代表的 K 块分区编号创建根节点,调用SearchEndNodes()函数获取结构树的所有末端节点,存入pTreeVector容器。
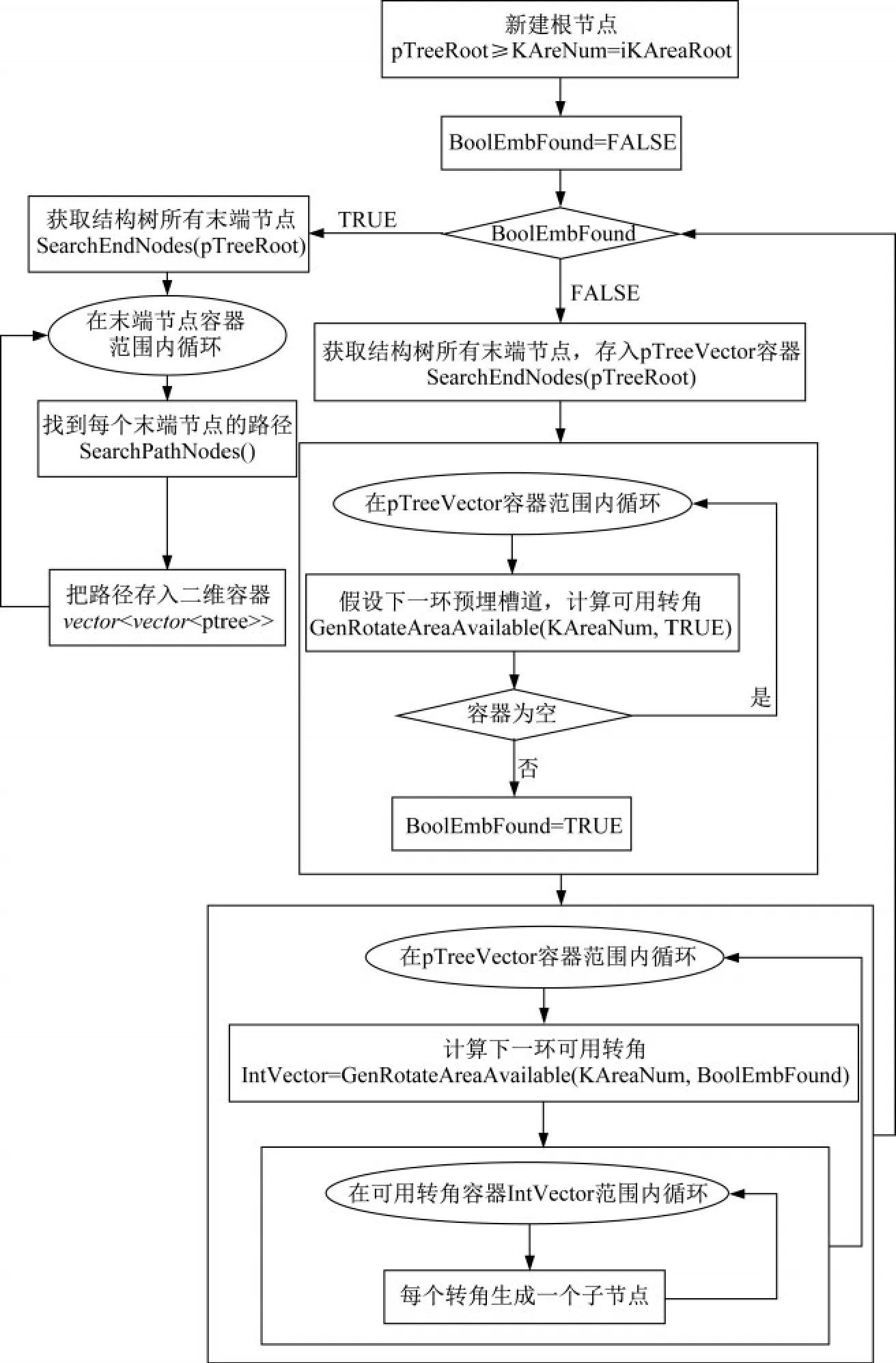
图5 GenRotTreeResultEmbed()函数流程Fig.5 Work flow for “GenRotTreeResultEmbed()” function
对于pTreeVector 中的每一个末端节点,假设下一环预埋槽道,计算其可用转角,如果可用转角序列计算结果不为空,将BoolEmbFound 布尔变量赋值TRUE,这一循环的作用是明确结构树的下一层是否具备预埋槽道的条件。
对于pTreeVector 中的每一个末端节点,根据前面计算的BoolEmbFound 变量值,计算下一环可用转角,对应每一个可用转角计算结果生成一个子节点,该循环的作用是生成下一层所有节点,如果BoolEmbFound=TRUE,生成的下一层节点是预埋槽道环,否则是普通环。
如果生成了代表预埋槽道环的末端节点,程序自动跳出循环,分别使用SearchEndNodes(),SearchPathNodes()函数得到所有代表预埋槽道环的末端节点及其从根节点出发的路径,汇总形成vector
2.4 从实现预埋槽道的所有可能转角组合中筛选最优路径
前述GenRotTreeResultEmbed()函数可以实现从某一个管片环出发,得到满足预埋槽道布置要求的所有可能旋转路径方案。
本函数的作用是从上述所有可能旋转路径方案中筛选最优结果,流程如下:
一维容器vector
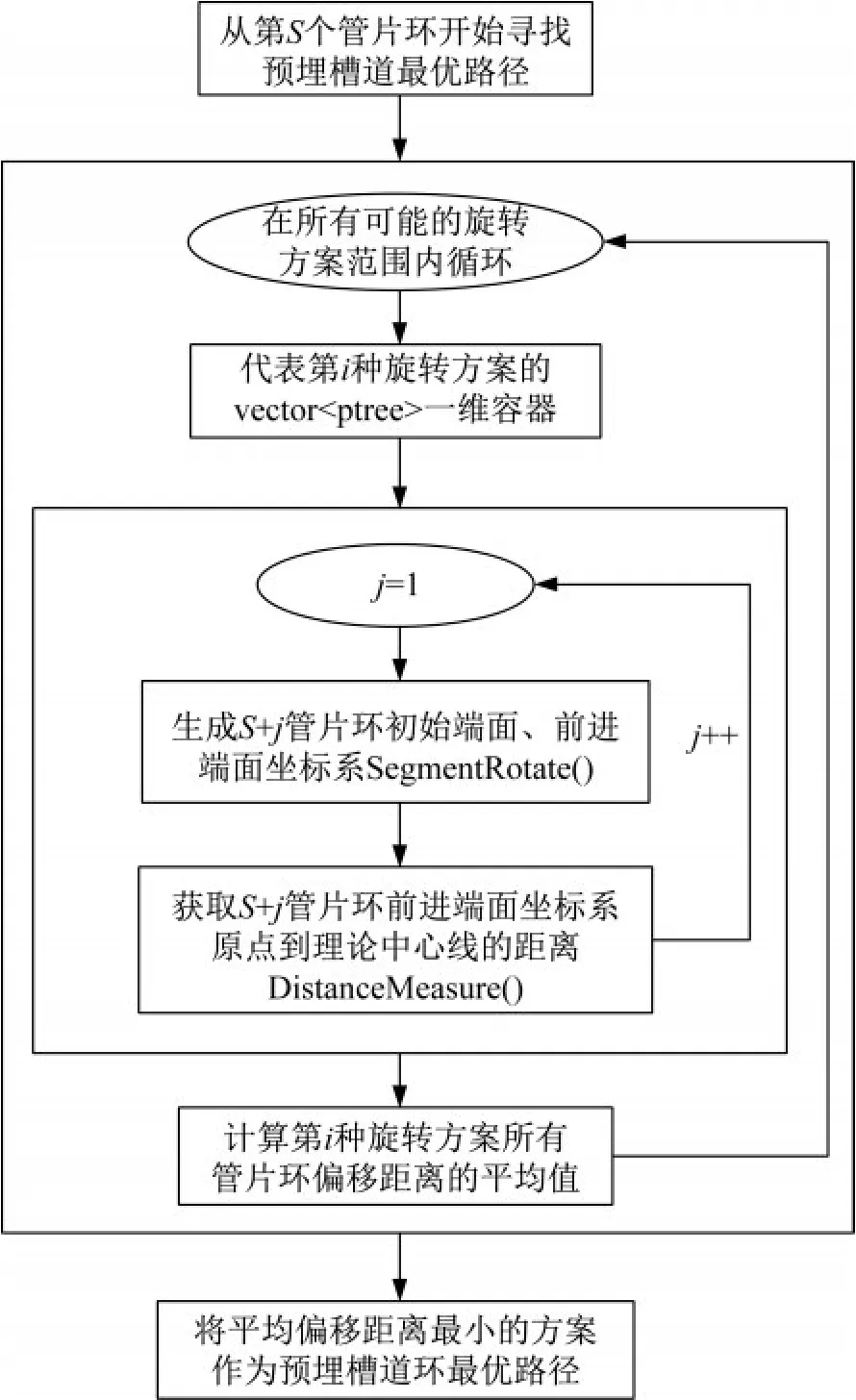
图6 BestPathFilter()函数执行流程Fig.6 Execution process for “BestPathFilter()” function
2.5 调用上述四个函数,完成最优化管片环位姿筛选
由于在实际工程中,接触网基础布置间距可在一定范围内选择,预埋槽道环的布置间距也就并非固定值,可以前后增减若干环。因此,如果遇到下一环无法预埋槽道的情况,向后回退,以第i-1 环数据为输入,调用GenRotTreeResultEmbed()函数,计算出从第i-1 环开始到达预埋槽道环的所有可能管片环相对旋转组合情况,然后,使用BestPathFilter()函数在这些所有可能组合中挑选出最优路径,并生成该路径范围内所有管片环对应的骨架坐标系。对于下一环非预埋槽道以及可用转角序列数目不是0 的预埋槽道情况,在所有可用转角范围内循环,计算前进端面坐标系及其原点到理论中心线的距离,选择距离最小的试算点。对盾构隧道范围内的所有管片环执行上述步骤,最终完成全隧道管片骨架建模,如图7所示。

图7 盾构隧道骨架建模流程Fig.7 Skeleton modelling process of shield tunnel
3 工程应用
3.1 项目背景
广湛高铁湛江湾海底隧道为速度250 km/h的双线盾构隧道,全长8.5 km,位于湛江市区,下穿湛江海湾,最大埋深约31 m,出于精细化设计和信息化建设管理的需求,对本隧道开展BIM设计。
3.2 盾构隧道BIM设计的模型及数据环境
在完成通用楔形管片环参数化BIM 建模,并正式开展BIM 设计之前,需要准备如图8 所示的建模环境。

图8 程序交互界面及嵌入零件设计模块中的操作按钮Fig.8 UI of the program and operation button embedded inside part design module
该建模环境呈树形结构,其中,总装配节点是根节点,各管片环BIM 设计成果存储在总装配节点下。总装配节点下的骨架节点由两部分组成:输入数据几何图形集、输出数据几何图形集,前者包含平面左线、隧道理论中心线、断链表、输入数据表,后者用于存储各管片环定位骨架坐标系。
如图8 所示,湛江湾海底隧道盾构管片包含10 个块体,且沿环向均匀分布有28 个纵向螺栓,这些螺栓将管片环划分成28 个环向区域,它们是管片环相对转动的基本角度单元。表1 描述了每一个块体覆盖的第一个和最后一个环向分区编号,当前块体预埋槽道,则“是否预埋”列数值为1。
3.3 盾构隧道管片定位骨架批量建模
如图8 所示,本文介绍的BIM 设计程序嵌入Dassault 平台零件设计模块,用户点击操作按钮,即跳转至用户交互界面。
用户在交互界面手动选择存储输入数据和输出数据的几何图形集;根据设计需要在”Axis Start”控件个性化选择初始管片环定位骨架或者点击“FromStartPoint”控件从理论中心线起点开始生成管片骨架;在”Segment Number”控件个性化输入管片数量或者点击“Whole Scope”控件实现在理论中心线范围内全覆盖管片环。
程序运行结束,自动在输出数据几何图形集创建两个几何图形子集“OrdinaryAxisGS”“SlotEmbeddedAxisGS”,分别存储普通管片环以及预埋槽道环的定位骨架。
除了骨架模型,本程序还生成了表2 所示的数据结果,该表格的每一行对应一个管片环,存储了各管片环的编号、里程、与理论中心线之间的距离、正上方块体编号、K 块所在分区编号、是否预埋槽道等信息。其中,“相对转角”列表示当前管片环相对前一环的旋转分区数目。
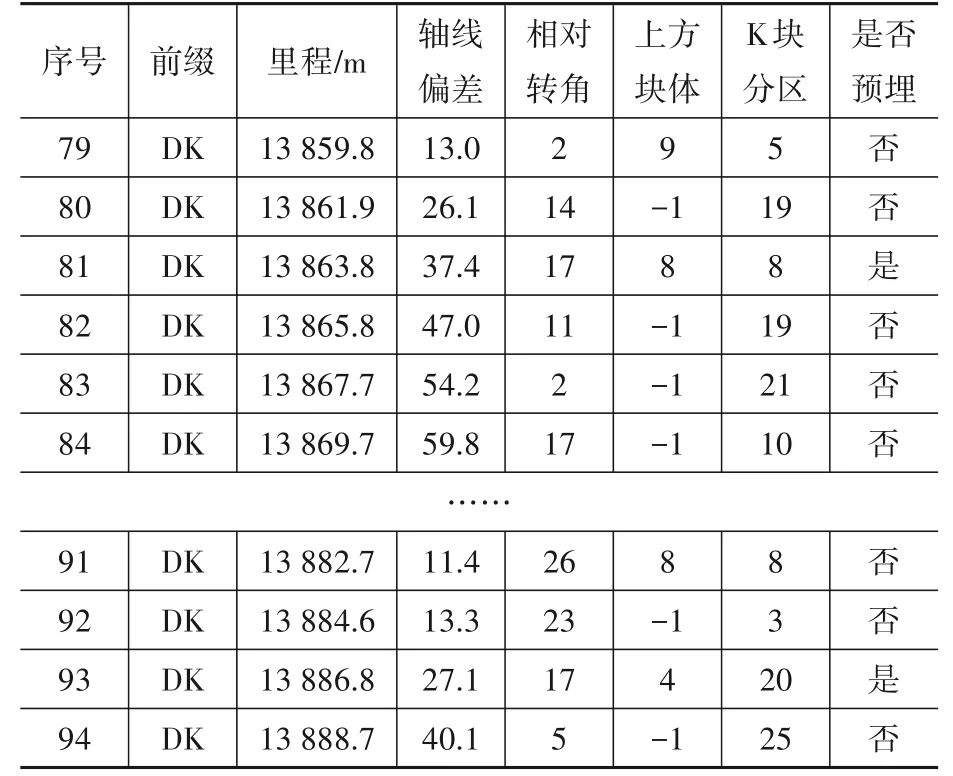
表2 输出数据结果表格样式Table 2 Output data table
3.4 盾构管片BIM模型批量实例化
如图9所示,使用达索Assembly Pattern 功能,在”Component”控件分别选择程序生成的用于存储普通管片环及预埋槽道环定位骨架的几何图形集,在”Specification”控件选择普通管片环以及预埋槽道管片环BIM模板。
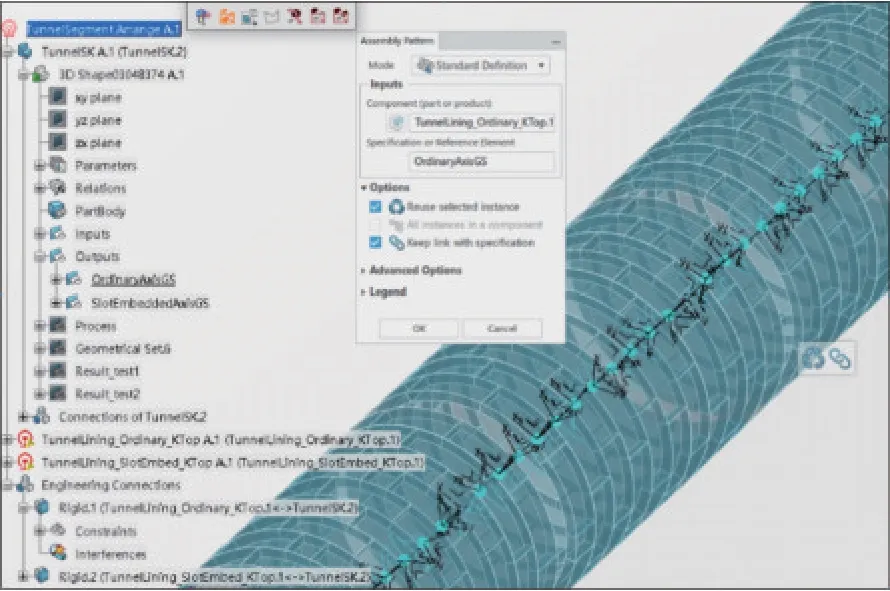
图9 使用达索Assembly Pattern功能完成管片批量BIM建模Fig.9 Instantiate segments using “Assembly Pattern”function of Dassault
实例化结束后,得到如图10 所示的BIM 设计成果,预埋槽道块用紫色标识。可以看出,各管片环错缝拼接,预埋槽道环按预定间距沿纵向布置,预埋槽道块位于正上方,满足接触网等“四电”设施的基础预埋要求。

图10 区间盾构隧道BIM设计模型及其细部结构Fig.10 BIM model of interval shield tunnel and its detail structure
按上述流程开展湛江湾海底隧道BIM 设计,“骨架建模+管片实例化”全过程仅需26 分钟,与传统方法相比,大幅度提高了效率和精度。
4 结论
本文针对盾构管片三维空间BIM设计普遍存在的自动化程度低、不适用于局部块体预埋槽道等缺陷,介绍一种基于Dassault/CAA 架构开发的BIM设计程序。本文获得的主要结论如下:
(1)采用树形数据结构能有效存储考虑预埋槽道布置需求的管片环相对旋转状态,为实现最优化位姿筛选创造了条件。
(2)将管片空间排布算法与基于Dassault 平台的CAA 架构融合,从代表所有可能转角状态组合的树形数据结构中筛选最优路径,可以完成全隧道管片骨架的最优化建模。
(3)使用本文介绍的开发成果进行广湛高铁湛江湾海底隧道BIM 设计,经过通用管片环模型准备、数据表格准备、骨架建模、模型批量实例化四个步骤,圆满完成考虑预埋槽道布置要求的BIM 设计。与传统方法相比,大幅度提高了效率和精度。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
水运工程(2020年11期)2020-11-27
门窗(2019年6期)2019-12-17
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
重庆建筑(2018年4期)2018-03-23
工程建设与设计(2016年4期)2016-02-27
上海金属(2015年3期)2015-11-29
中国科技信息(2015年21期)2015-11-07
水道港口(2015年1期)2015-02-06