基于柔性转向架的轨道车辆悬挂参数优化
2023-10-25 10:35朱怀志
湖北工业大学学报 2023年5期
朱怀志, 徐 巍
(湖北工业大学机械工程学院, 湖北 武汉 430068)
转向架作为连接轮对和车体的重要部件,其悬挂参数的数值对车辆运行性能有着重要的影响。故对轨道车辆悬挂参数进行优化,获得合适的参数组合来提升车辆动力学性能在设计过程中是至关重要的[1]。轨道车辆在设计过程中也越来越轻量化,车辆结构刚度降低,此外随着运行条件的日益严苛,研究轨道车辆关键结构因非线性变形对车辆系统振动所带来的影响也越为重要[2]。故必要在多体动力学仿真计算中引入刚柔耦合动力学。宋子洋、傅茂海[3]建立了钢轨打磨车的柔性体模型,研究了钢轨打磨车在作业工况时的曲线通过性能,并对提高曲线通过性能提出了建议。Shieh N C[4]以轻轨车辆的转向架为研究对象,通过多目标优化算法对转向架的悬挂弹簧刚度和阻尼参数进行优化设计,提升了轻轨车辆的垂向平稳性指标。Ashtiani I H[5]以轨道列车的三大件式转向架斜楔的几何结构为参数变量,分别在空载和满载的工况下对车体垂向加速度进行优化。肖乾等[6]用多体动力学软件UM建立了某地铁列车头车的动力学模型,将车体考虑为柔性体,利用Isight软件对转向架的车辆横向、垂向平稳性指标进行优化。薛廉政[7]建立考虑柔性车体的动车组某节车厢的动力学模型,利用Isight软件建立悬挂参数和横向、垂向平稳性指标代理模型,以悬挂参数为设计变量对车辆运行横向、垂向平稳性指标进行优化。东方世平[8]建立了CRH2拖车的悬挂参数与临界速度、脱轨系数和磨耗数之间关系的代理模型,采用NSGA-Ⅱ优化算法为目标函数进行优化。
目前对于车辆悬挂参数优化的研究大多数都将车辆关键零部件视为刚性体,由此得到的仿真结果并不符合车辆真实运行情况。轨道车辆悬挂参数优化的目标一般为单目标,不能使车辆动力学性能达到最优结果。为解决这些不足,本文以最高运行速度为65 km/h的某型道工程车辆为研究对象,对转向架进行了柔性化处理,建立包含柔性转向架的车辆刚柔耦合动力学模型。通过对其进行动力学仿真并与刚性模型对比直线运行和曲线通过方面的性能。以轨道车辆一系、二系悬挂参数为设计变量,轨道车辆的横向、垂向平稳性指标,脱轨系数,轮轨横向力为优化目标,设计最优拉丁超方法试验,采用RBF神经网络模型对试验数据进行拟合,并建立多目标优化模型,通过NSGA-Ⅱ算法寻找最优Pareto解,实现轨道车辆悬挂参数的优化。
1 刚柔耦合动力学模型的建立
1.1 转向架有限元模型建立
根据转向架的结构参数使用Solidworks建立刚性模型,利用HperMesh软件进行四面体网格划分并赋予结构属性。最后用有限元分析软件ANSYS选取转向架三维模型的主自由度节点,生成缩减自由度后的柔性体文件。网格划分后转向架有限元模型生成3475000个节点、2612500个单元。转向架有限元模型如图1所示。

图1 转向架有限元模型
1.2 柔性模型模态求解
机械结构的振动特性包括结构的固有频率和振型,可以反应机械结构振动的强度和稳定性,是结构承受动态载荷设计中的重要参数。采用模态分析法可以确定机械部件的振动特性。
系统线性结构自由振动方程为:
(1)
当结构不受外力作用时,其自身振动产生的振动模态为自由振动模态,其自由振动方程为:
(2)
系统运动的简谐运动解为:
u=Asin(ωt+φ)
(3)
将u=-Aω2sin(ωt+φ)代入(2)式可以得到:
([K]-ω2[M]){u}=0
(4)
当{u}=0时,即各节点的位移为0时,与实际情况不符,故
det{[K]-ω2[M]}=0
(5)
其中K∈Rn×n,M∈Rn×n分别为刚度矩阵和质量矩阵,式(5)可以求得固有频率{ω12,ω22,…,ωn2},将结构带入式(4),可以得到与之相对应的主振型{ui},i=1,2,…,n。
用ANSYS对有限元模型进行模态和子结构分析,因计算模态为自由模态,故转向架模型有6个自由度。求解之后的前6阶的模态为0,故选取7阶到第12阶作为转向架的模态,其主要振型如表1所示。

表1 转向架7~12阶模态频率和振型
1.3 刚柔耦合动力学模型
在Simpack中将除转向架外的全部部件设为刚体,只考虑转向架的弹性变形。将ANSYS生成的包含模型外形信息的.cdb文件与包含子结构模态信息的.rst文件与.sub文件通过FEMBS柔性模块生成FBI柔性文件。FBI柔性文件使每个柔性体都被视为独立的子系统。根据表2所示的轨道工程车结构及悬挂参数将转向架和车体通过铰接和与悬挂参数相对应的力元进行连接,建立包含柔性转向架的刚柔耦合动力学模型(图2)。
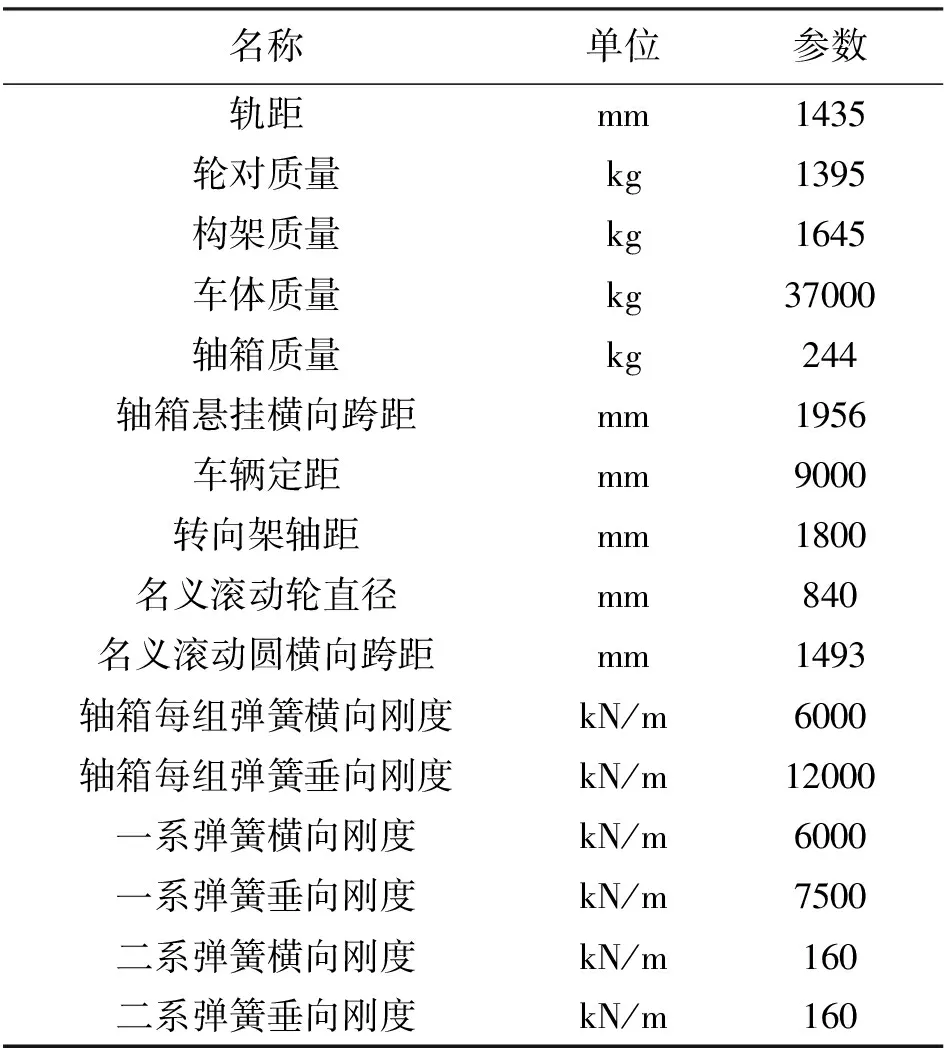
表2 轨道工程车结构参数
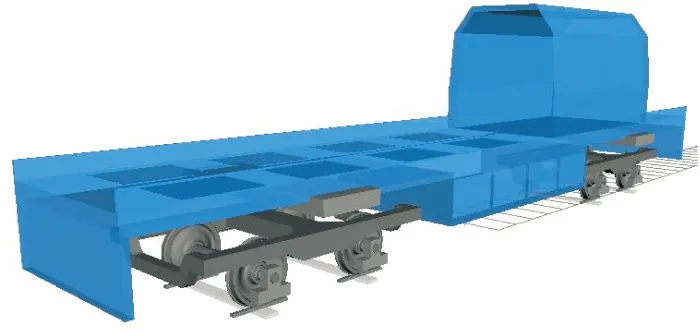
图2 车辆刚柔耦合模型
由牛顿第二定律可以得到轨道工程车的动力学方程为:
(6)
式中:w为轮对;g为转向架;x为位移矩阵;M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;F为载荷矩阵。
2 转向架柔性对动力学性能影响
2.1 直线运行稳定性
将一段直线线路设置为5 km,在距离路线开头50~100 m区间段施加美国五级轨道不平顺谱横向和垂向不平顺激励。通过逐步增加车辆速度,测试车辆通过试验线路时,观察前方第一对轮的横向振动曲线。当该曲线不再呈现明显的收敛趋势时,记录此时车辆的速度。这个速度被视为车辆的非线性临界速度仿真计算值。
通过仿真结果可以看到,当车辆运行速度达到88 km/h,轮对的横移量已不再有收敛趋势,如图3b所示,由此可以判断车辆不在处于稳定状态。故通过刚柔耦合模型得到的非线性临界速度的仿真值为87 km/h。
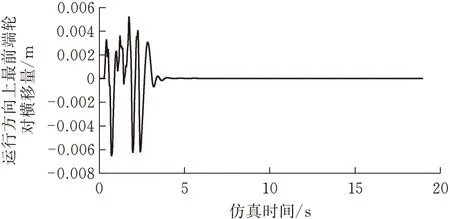
(a)87 km/h
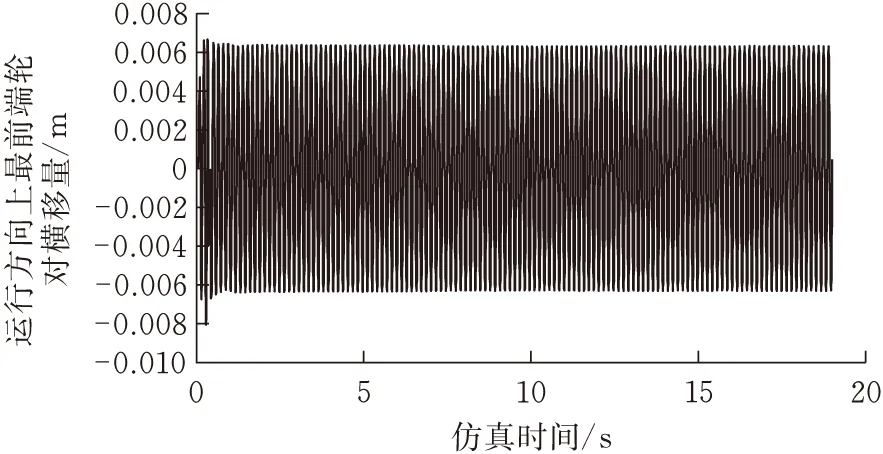
(b) 88 km/h
按照相同方法对刚性仿真模型进行仿真,得到刚性仿真模型的临界速度为96 km/h。两种模型得到的轨道车辆临界速度均大于车辆最高运行速度65 km/h,且刚柔耦合模型的临界速度对比刚性模型有所降低,降幅为10.3%。
2.2 车辆曲线通过性能
研究车辆在曲线路况下的曲线通过性能,可以更好地了解车辆在运行过程中的动态特性和性能表现。将轨道激励设置为美国五级轨道不平顺谱,将车辆通过曲线路线时的运行速度设置为最高运行速度65 km/h,通过分析车辆动力学模型中的第1位轮对作为研究对象,对比刚柔耦合模型与刚性模型的曲线通过性能。
根据我国《新建客货共线铁路设计暂行规定》相关标准,设置曲线线路的曲线半径长为600 m,超高为80 mm,缓和曲线长度为70 m,圆曲线长度为100 m。
2.2.1脱轨系数确保工程轨道车辆安全运营的关键在于对通过曲线道路时的脱轨安全性进行评价和监测。如图4所示,根据Nadal理论,设轮缘角为δ,建立轮轨接触点处的平衡方程为:
(7)
式中,Fz为作用于车轮上的垂向力;Fy为作用在轮缘上的横向力;Fn为钢轨对轮轨接触点的法向力;Fcy为作用在轮轨上的摩擦力;δ为轮缘角;μ为轮缘与钢轨之间的摩擦系数。
对方程进行求解,可得脱轨系数:
(8)
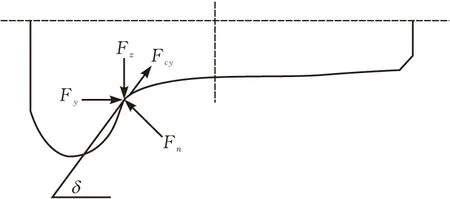
图4 临界状态下轮轨接触点受力
根据公式(8)得知轨道车辆的脱轨系数与轮轨间的摩擦系数和车轮轮缘角度密切相关。同时,在车辆运行时,轮轨间产生的横向力和垂向力也能等效表述车辆的脱轨系数。因此,在进行轨道车辆系统的建模仿真时,主要需确定垂向力Fz和横向力Fy之间的关系。
根据我国的GB5599-85为标准对轨道工程车曲线通过性能进行评定,其规定脱轨系数限度如表3所示。

表3 脱轨系数限定
两种模型在曲线工况时的脱轨系数如图5所示,刚柔耦合仿真模型脱轨系数相比刚性模型有所增加,其最大值为0.624,刚体模型脱轨系数最大值为0.586。两种模型的脱轨系数最大值差值为0.038,增幅为6.4%,差距较为明显。

图5 脱轨系数
2.2.2轮轨横向力如果轮轨间的横向力过大,可能会导致轮轨之间的磨损和破坏,这将会增加线路的维修负担。更严重的情况下可能会发生车辆脱轨,造成安全事故。此外还会进一步加剧线路的横向不平顺,进而影响车辆的运行平稳性[9]。
车辆的轮轨横向力限制是根据车辆轴重制定的。根据相关规范,我们采用车辆轴重乘以0.4的系数来计算轮轨横向力的极限值。该公式可用于计算车辆在曲线行驶时产生的横向力是否在规定范围内,以确保列车行驶的安全性和稳定性。计算公式为:
Q≤0.4(Pst1+Pst2)
(9)
式中,Pst1为左轮静载荷;Pst2为右轮静载荷。
结合本文研究的车辆模型,轮轨横向力最大值不超过轴重的0.4倍,应取值≤51 136 N。
在SIMPACK后处理模块中分别提取刚柔耦合模型和刚性模型下的轨道车辆轮轨横向力瞬时值曲线,如图6所示。
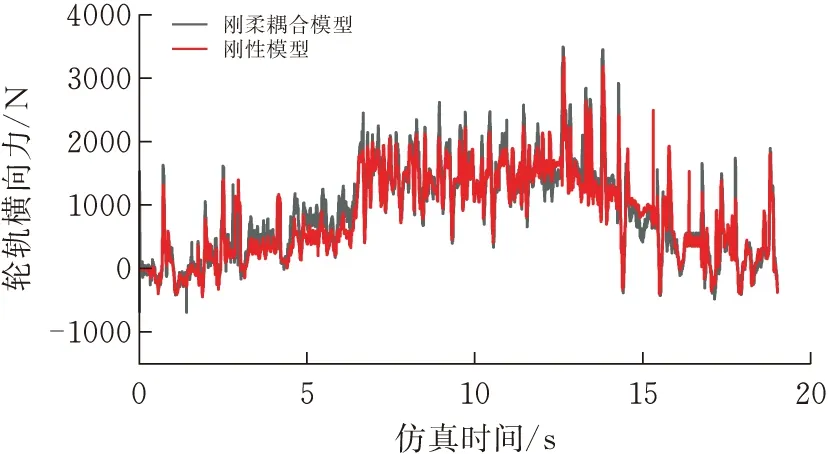
图6 轮轨横向力
根据图6仿真结果可知,刚柔耦合仿真模型轮轨横向力最大值为3495 N,刚性模型的轮轨横向力最大值为3346 N,刚柔耦合模型与刚体模型的轮轨横向力最大值均满足车辆轮轨横向力的极限值。刚柔耦合仿真模型轮轨横向力整体要高于刚性模型,最大值上升1.4.%,故考虑转向架柔性对轮轨横向力最大值有所提升,但影响不大。
2.3 车辆运行平稳性
轨道车辆的运行平稳性对于乘客的舒适性至关重要。过大的振动加速度和频率会导致不良的行驶体验和乘客的不适感。式(10)为GB/T 5599-2019标准规定的计算车辆运行平稳性的公式。平稳性评价等级表如表4所示。
(10)
式中,a为振动加速度,m/s2;f为振动频率,Hz;F(f)为修正系数。
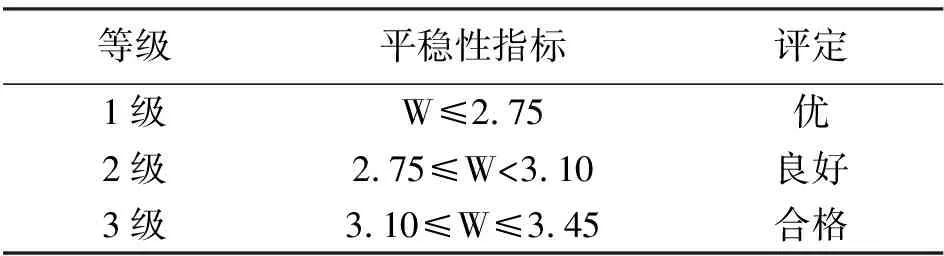
表4 平稳性评价等级
设置线路总长为5 km,设置5m平滑过渡区,并在平滑过渡区后添加美国Ⅴ级轨道谱激扰至距离起点2 km处。根据GB5595-85国标中的平稳性评价指标推荐测试方法,建议仿真时间为前20 s,采样频率为256 Hz。为了准确评估刚柔耦合模型和刚性模型直线通过时的平稳性,在转向架中心正上方车体地板面的一侧设置了一个与其距离为1000 mm的采样点。两种模型在最大运行速度为65 km/h下运行时,记录了采样点横向和垂向加速度时间历程,具体数据见图7和图8。
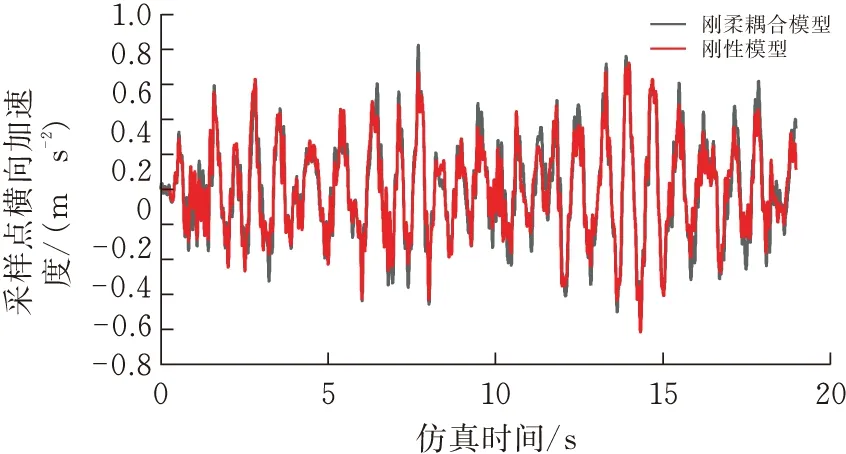
图8 采样点垂向加速度
结果表明,与刚性仿真模型相比,车辆刚柔耦合仿真模型采样点横向、垂向加速度分别由0.704 m/s2、0.719 m/s2上升到0.884 m/s2、0.822 m/s2,上升幅度分别为25%和14.3%,说明转向架弹性因素对车辆振动情况有明显影响。
将采样点加速度信号通过MATLAB软件进行数据处理得到车辆横向、垂向平稳性指标结果如表5所示。

表5 各模型平稳性指标
刚柔耦合模型平稳性指标较刚性模型都有一定程度的增大,横向与垂向平稳性分别降低9.6%和7.2%。两种模型平稳性指标的差异较大,故转向架的弹性变形是造成车辆运行平稳性降低的原因。
3 基于RBF神经网络转向架悬挂参数优化
3.1 RBF神经网络原理
RBF神经网络是一种响应速度快、鲁棒性强、非线性逼近能力强的由对称径向函数线性组合的单向型神经网络。RBF网络由输入层、隐藏层和输出层组成。隐藏层使用径向基函数作为激活函数,输入层将输入数据传递到隐藏层,隐藏层中每个神经元都有一个径向基函数作为激活函数。径向基函数的中心点是随机选择的,通过迭代算法,中心点会不断地调整来优化网络的性能。隐藏层的输入再传递到输出层,输出层根据需要解决的问题来选择合适的激活函数。
其输入与输出之间的关系如式:
(11)
式中,n为样本点个数;ωi为每个云层神经元的权重;x为输入数据向量;φi(x)为径向基函数;
(12)
式中,ci为第i个基函数中心点;σi为第i个基函数的宽度;‖x-ci‖为x与ci的欧几里得距离。
3.2 基于RBF神经网络代理模型搭建
本文选取轨道车辆的轴箱定位节点横向、垂向刚度,一系和二系弹簧的横向、垂向刚度作为设计变量,轨道车辆横向平稳性指标W/y、垂向平稳性指标W/z,脱轨系数Y,轮轴横向力Fy为优化目标函数建立多目标优化模型。其中悬挂参数设计变量的上下限均为原始数值的10%。设计拉丁超立方试验,进行100次抽样,得到6×100的试验设计矩阵。悬挂参数原始值及上下限如表6所示,部分抽样值与响应值如表7所示。使用RBF神经网络模型对得到的实验数据进行近似拟合得到代理模型。

表6 悬挂参数原始值及上下限 kN/m
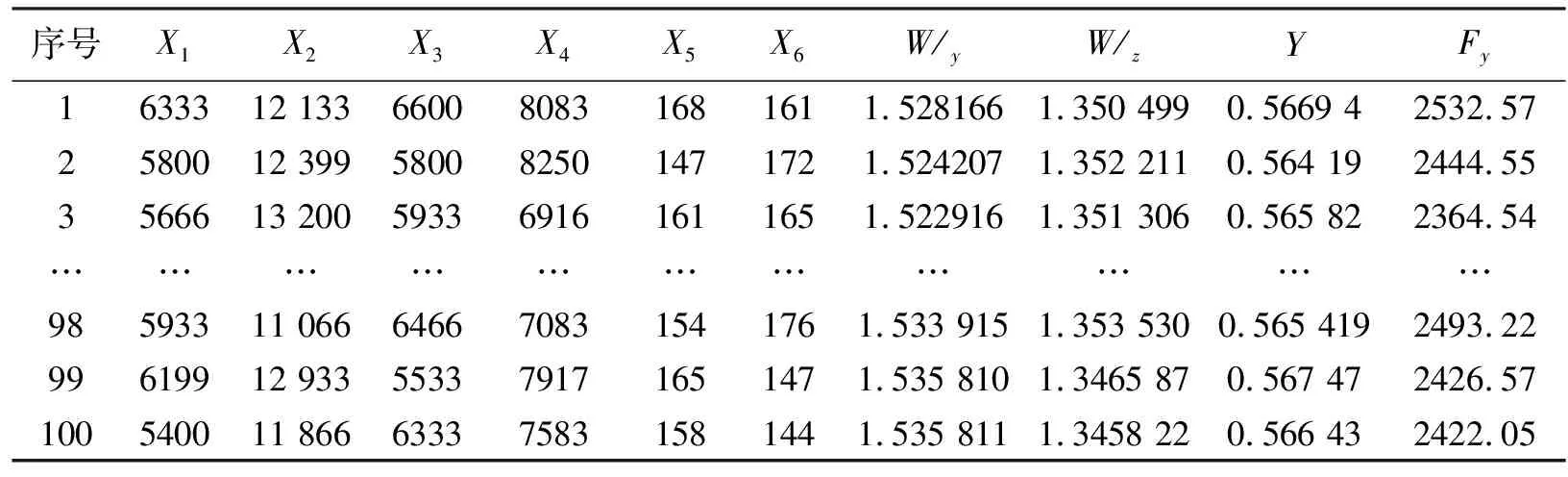
表7 拉丁超立方抽样数据
3.3 代理模型精度检验
为了能够精准预测轨道车辆动力学性能,需要对建立代理模型进行检验。RBF神经网络模型拟合出的预测值与实际仿真值越接近拟合直线,证明RBF神经网络模型模型质量越高。拟合优度图如图9所示。从拟合结果可以看出,在拟合直线上以及拟合直线两侧,四个优化目标样本点均向拟合直线直线靠拢,表明RBF神经网络模型的拟合精准度较高。
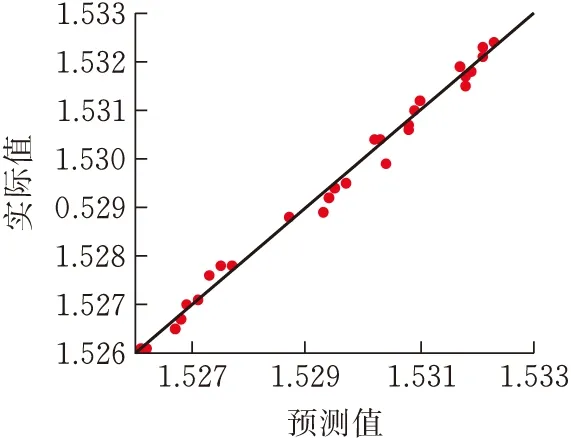
(a)稳定性横向指标
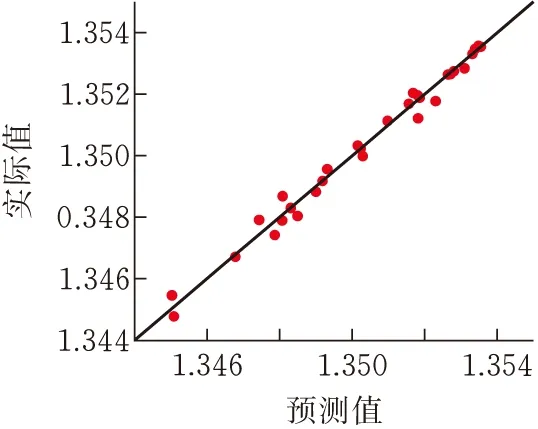
(b)稳定性垂向指标
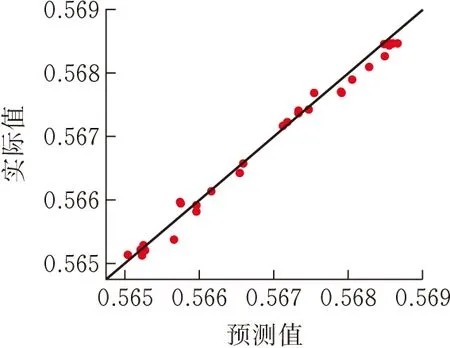
(c) 脱轨系数
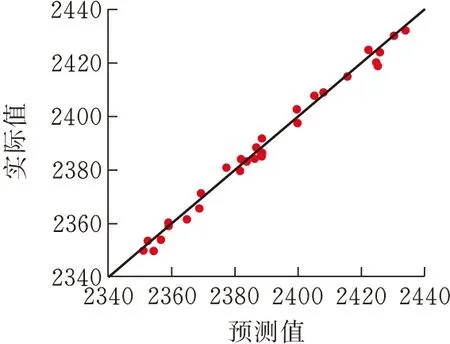
(d)轮轴横向力
样本决定系数R2可检验响应面的拟合精度,R2取值范围为[0,1],其数值越趋近于1,说明响应面拟合的相对误差越小,精度越高。
决定系数R2的定义为:
(13)
式中:SSE为拟合后残差平方和;SST为整体回归平方和。
两者的计算方法如下:
(14)

经过计算,3个模型的R2分别为0.9847、0.9841、0.9884和0.9876,说明4个拟合函数的相对误差较小,模型的准确度较高。
4 基于NSGA-Ⅱ的多目标优化计算
4.1 NSGA-Ⅱ原理
NSGA-Ⅱ算法基于遗传算法,改进选择操作。它采用了快速非支配排序方法对种群进行排序,并通过拥挤度计算和精英保留策略对合适的个体进行了选择,可降低算法计算复杂程度,被广泛应用于解决多目标优化问题,从而得到Pareto前沿解集[9],从而避免陷入局部最优解。NSGA-Ⅱ算法流程图如图10所示,具体步骤为:
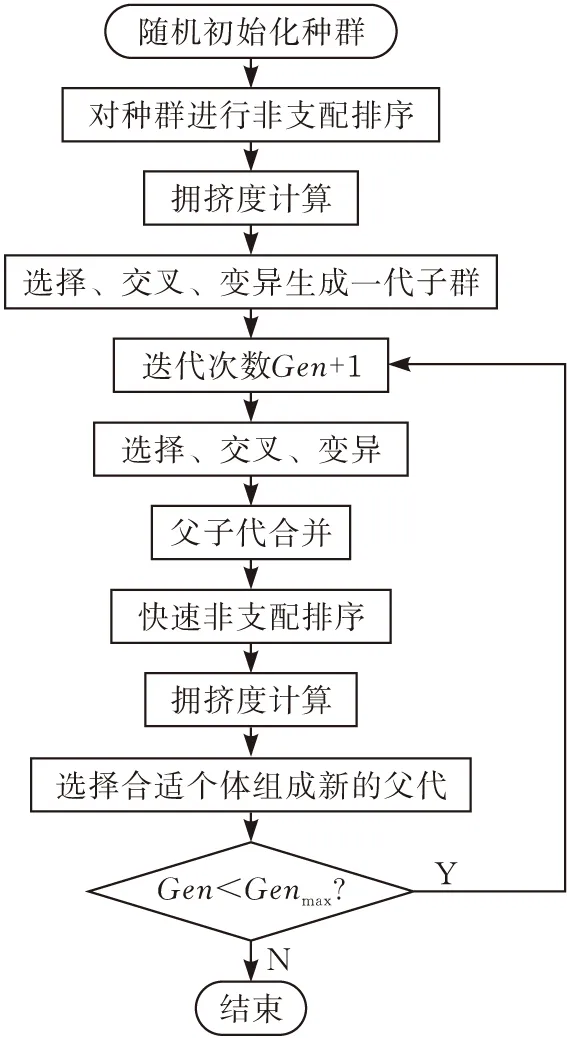
图10 NSGA-Ⅱ算法流程
1)随机生成初始化父代种群P0,种群规模为N,将父代种群作非支配排序后,通过遗传算子获得第1代子代种群Q0,子代种群规模为N。
2)在第2代初始阶段,将初始化父代种群P0与子代种群Q0融合组成一个新种群R0,其可以表示为P0∪Q0=R0,将新种群R0中的所有个体进行非支配排序,得到非支配前端S1、S2和S3等。
3)计算每个非支配层个体的拥挤度,并将其排列,根据排序结果,保留最优的N只个体作为新的父代种群PN+1,算法迭代次数Gen=Gen+1。
4)对最佳的父代种群PN+1进行交叉和变异操作。
5)对经过遗传操作的种群进行检验,并在迭代代数Gen达到所设定的最大值Genmax时终止运算,若未达到则循环执行步骤2)和步骤3),直至获得Pareto最优解。
4.2 优化数学模型建立
本文研究的优化问题目标函数为车辆的横向平稳性指标、垂向平稳性指标、脱轨系数和轮轨横向力。根据我国国标GB5599-19中的相关规定,横向、垂向平稳性指标应不超过2.5;脱轨系数不应超过0.8;轮轨横向力等不应超过轴重的0.4倍。在约束条件中,目标函数值应尽可能最小化。
为了找出设计变量参数之间的最佳参数组合,采用NSGA-Ⅱ算法优化数学模型。
以原车悬挂参数做为设计变量,得到的优化设计数学模型如下:
min(W/y,W/z,D(x))T
式中:W/y为车辆运行横向平稳性评价指标;W/z为垂向平稳性评价指标;D(x)为脱轨系数;Fy(x)为轮轨横向力;Pst1,Pst2为左右轮静载荷。
4.3 目标函数Pareto解
种群规模N=100,交叉概率Pc=70%,变异概率Pm=20%,最大迭代次数为200,根据真实试验产生初始种群,差分进化产生子代,并通过快速非支配排序和拥挤计算选择合适个体组成新父代,最终得到Pareto前沿解(蓝点)与最优解(绿点)如图11所示。

(a)横向平稳性指标
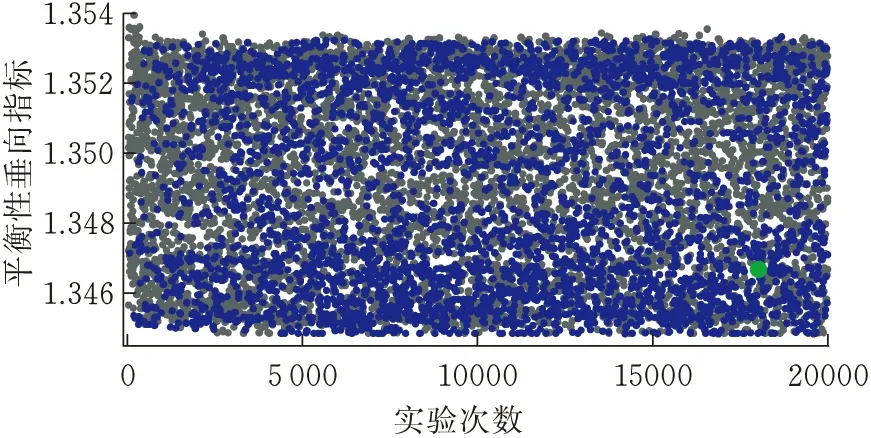
(b)垂向平稳性指标
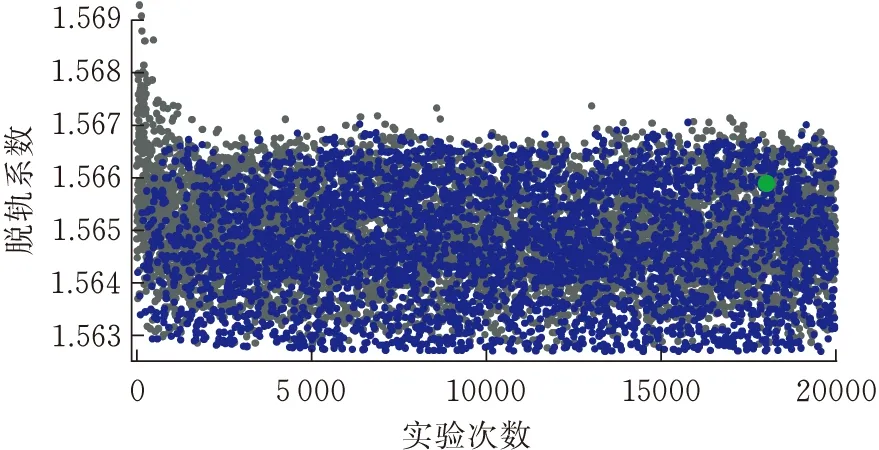
(c)脱轨系数
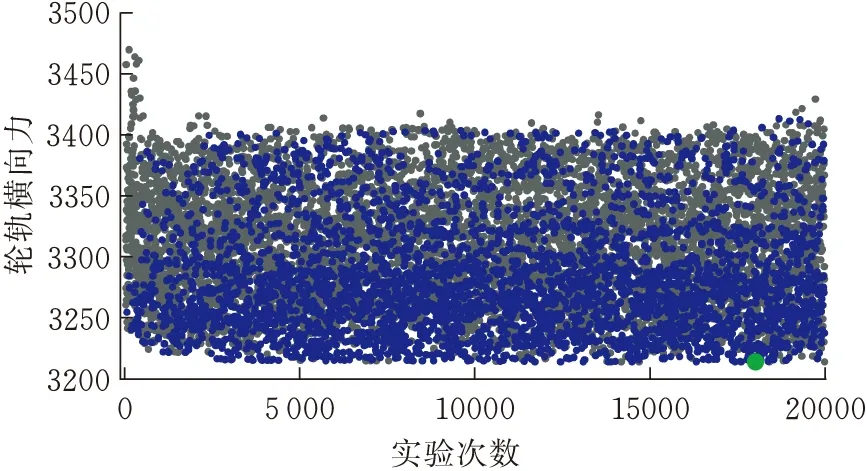
(d)轮轨横向力
目标函数的最优解为第18029组解,根据得到的轨道车辆悬挂参数组合结果列于表8中。
4.4 误差分析
由于代理模型存在一定误差,我们将计算得到
的悬挂参数最优解重新导入动力学模型中进行仿真计算,得到优化后目标函数的实际值。我们将优化后目标函数实际值与原始悬挂参数动力学模型的仿真结果进行对比分析得到目标函数的优化率;通过优化后目标函数实际值与仿真值对比得到误差率。
其中:
优化率
误差率
式中:θ表示原始车辆动力学性能响应;φ表示优化目标仿真值;δ表示优化目标实际值。将车辆刚柔耦合仿真模型优化计算结果的优化率、误差率,分别列于表9。
4.5 优化结果
为确定优化后转向架悬挂参数优化效果,将优化后悬挂变量参数带入原始模型进行动力学性能仿真,与原始模型进行对比,得到优化后横向、垂向加速度和临界速度的优化率。
由表10可知,悬挂参数优化后采样点的振动情况相比原始悬挂参数模型均有所下降,其中横向振动加速度由0.884 m/s2下降到0.763 m/s2,下降幅度达到13.7%;垂向加速度由0.822 m/s2下降到0.726 m/s2,临界速度从88 km/h提升到99 km/h,提升13.8%,优化效果明显。
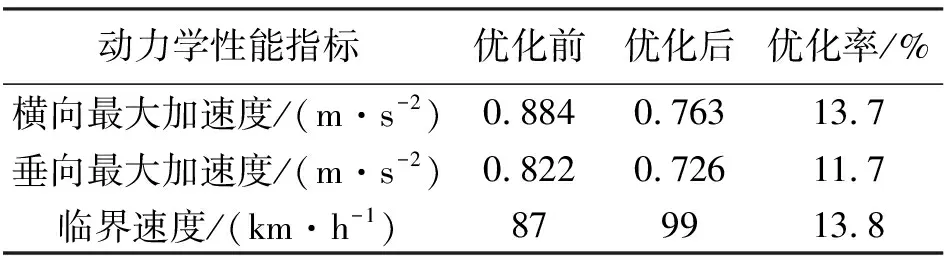
表10 动力学性能指标优化率
5 结束语
本文基于轨道工程车刚柔耦合动力学模型,研究了转向架的弹性因素对车辆的动力学性能的影响。利用车辆悬挂参数和车辆动力学性能指标相关性建立RBF神经网络模型,通过NSGA-Ⅱ算法得到优化目标函数的Pareto解,结论如下。
1)考虑转向架柔性后,轨道车辆的直线运行稳定性、曲线通过性和车辆运行平稳性指标均有所降低。转向架的弹性变形对车辆动力学性能有较大影响。
2)以轨道车辆悬挂参数与横向平稳性指、垂向平稳性指标、脱轨系数、轮轨横向力作为目标函数所建立的RBF神经网络模型具有较高的拟合效果。
3)通过寻优算法得到的目标函数解为:X1=5775,X2=11419,X3=60421,X4=7834,X5=152,X6=158。优化后轨道工程车的横向、垂向平稳性指标分别提升14.6%和18.5%,脱轨系数降低8.9%,轮轨横向力降低7.4%,横向、垂向振动最大加速度分别降低13.7%和11.7,临界速度上升13.8%,轨道工程车动力学性能指标优化效果良好。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
哈尔滨铁道科技(2020年4期)2020-07-22
铁道通信信号(2020年10期)2020-02-07
工程与建设(2019年5期)2020-01-19
制造技术与机床(2019年12期)2020-01-06
西南交通大学学报(2018年5期)2018-11-08
厦门理工学院学报(2016年1期)2016-12-01
铁道通信信号(2016年6期)2016-06-01
铁道运营技术(2015年3期)2015-12-23
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25