不确定条件下炼油厂氢气网络系统的柔性设计与优化
2023-12-16 08:18陈莹,秦康,吴昊
石油炼制与化工 2023年12期
陈 莹,秦 康,吴 昊
(中石化石油化工科学研究院有限公司,北京 100083)
氢气网络系统是炼化企业中重要的原料供应系统。近年来,在环保要求日趋严格、油品质量不断升级的背景下,油品加氢工艺和氢气网络系统在企业中的地位愈加重要[1-2]。随着氢气需求量的逐年递增,炼化企业的用氢成本不断攀升,已成为仅次于原油的第二大原料成本要素[3-4]。然而,炼化企业面临制氢成本高昂(10 000~20 000 元/t)、制氢装置能耗大(天然气制氢平均综合能耗约为1 000 kgOE/t,煤制氢平均综合能耗高达5 600 kgOE/t,1 kgOE=41.8 MJ)、制氢过程碳排放量大(天然气制氢平均CO2排放量约为10 t/t,煤制氢平均CO2排放量约为20 t/t)等问题。因此,通过全厂氢气系统优化以提高氢气利用效率、降低制氢负荷是炼化企业节能降碳、挖潜增效的重要途径。
柔性是指系统对于不确定性的耐受能力,即在偏离设计条件的情况下,系统能否通过调节控制变量来满足产品质量、产量、利润等关键指标。炼油厂氢气网络系统的运行受原油性质、油气产品市场需求、氢公用工程价格、操作条件等多种因素变化的影响[5-6]。因此,在对氢气网络系统优化设计时,需要全面考虑各种不确定因素。氢气网络系统中存在的不确定因素可以分为两大类:一是与外部市场变化相关的不确定性因素,包括成本端波动的电能价格(简称电价)和氢公用工程价格,以及利润端变化的产品价格;二是与操作过程相关的不确定性因素,通常是指波动的氢源供氢量和氢阱需氢量,如原油性质变化导致加氢装置氢气需求量的变化,汽油芳烃含量限制导致重整装置副产氢气量的下降等。
氢源、氢阱之间氢气供需量的不平衡可能会造成严重的后果,如油气产品质量不合格,加氢装置低负荷运行,装置因氢气供应问题而紧急停车等[7]。因此,需要从“经济最优”和“操作稳定”两方面对炼油厂氢气网络系统进行集成设计与操作优化,综合考虑各种不确定性因素的影响,建立与实际氢气网络运行状况一致度更高的氢气网络系统模型。基于此,本研究提出一种融合柔性约束的两阶段随机规划建模框架,以处理氢气网络系统中存在的多种不确定因素;利用两阶段随机规划优化经济期望,并通过柔性分析保证操作过程的鲁棒性,旨在建立一个严格的数学规划模型,用于描述不确定条件下炼油厂氢气网络系统的集成设计与操作优化。
1 问题描述
炼油厂的氢气网络系统由6个重要单元组成,分别是氢源、氢阱、氢公用工程、提纯单元、压缩单元和燃料气系统[8],每个单元均可表示为数学集合形式,如氢源集合I(i=1,2,…,|I|)、氢阱集合J(j=1,2,…,|J|)、氢公用工程集合H(h=1,2,…,|H|)、提纯单元集合M(m=1,2,…,|M|)、压缩单元集合C(c=1,2,…,|C|)、燃料气系统集合F(f=1,2,…,|F|),其中|I|,|J|,|H|,|M|,|C|,|F|分别为相应6个单元集合中的元素数量。此外,氢气网络系统集成设计时需综合考虑各种不确定因素的影响,其中能源(电、氢公用工程、燃料气)价格波动由基于市场历史数据预测得到的不同价格情景S(s=1,2,…,|S|)来表示;操作参数波动由不确定集合的顶点V(v=1,2,…,|V|)来描述。炼油厂氢气网络系统中的氢源和氢阱,通过压缩单元和提纯单元连接成网络超结构,如图1所示。氢气网络系统的超结构是指氢气网络中过程单元所有可行的连接方式和所有潜在的流程结构。
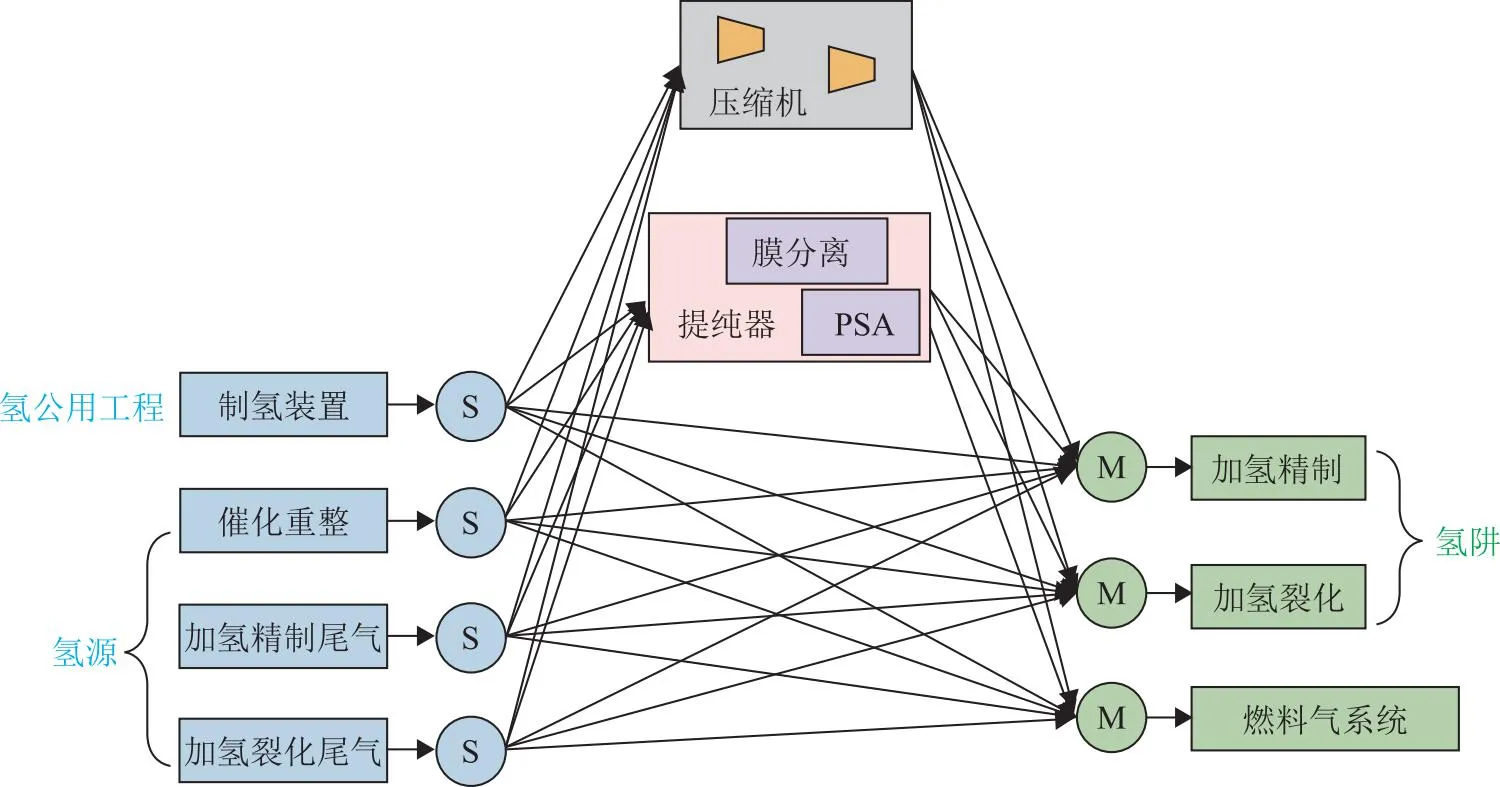
图1 氢气网络的超结构示意
2 融合柔性约束的两阶段随机规划建模方法
针对氢气网络系统中存在的多种不确定性,提出以融合柔性约束的两阶段随机规划建模框架来处理;在利用两阶段随机规划优化经济期望的同时,通过柔性分析保证操作过程的鲁棒性。
不确定条件下氢气网络的设计问题可以描述为两阶段随机规划问题。其中,第一阶段的决策变量为设计变量,决定氢气网络的拓扑结构,包括管道的连接、压缩机和提纯装置的设置以及各过程单元设计负荷的确定等;第二阶段的决策变量为操作变量,即每种情景下氢气网络的最佳操作条件,包含氢气流股的流量、纯度、压力等状态变量。随机规划问题中,第一阶段的决策与网络拓扑结构的配置相关,构成了氢气网络的投资成本;第二阶段的决策与氢气网络在多情景下的实际运行状况相关,决定了氢气网络的操作成本。
基于对市场历史数据的统计与分析,分别用3个离散的价格情景(低、中、高价格)来描述氢公用工程价格、电价和燃料气价格的波动,并为每个情景设定相应的概率。因此,该两阶段随机规划问题共有27种组合的价格情景。

包含柔性约束的优化设计问题可表示为两阶段非线性无限规划的数学形式,如式(1)所示。

s.t. ∀θ∈T{∃z[fn(d,z,θ)≤0,∀n∈N]}
(1)
式(1)的含义是通过调整设计变量d,在整个不确定参数空间T内,最小化最优成本函数R*(d,θ)的期望值。约束条件为柔性分析问题中的可行性约束,N表示所有过程可行性约束编号的集合。
通过对目标函数进行离散化近似,将可行性约束等价表述为max-min-max约束形式[9]。如果所有临界点都位于不确定参数构成的超矩形区域的顶点上,则对于任意θ∈T,操作的可行性可以通过超矩形所有顶点上设计的可行性来保证[10]。因此,可以将超矩形全部顶点的柔性约束作为设计可行性的判别条件以替代max-min-max约束,从而进一步将其转化为式(2)所示优化问题。
s.t.f(d,zs,θs)≤0,∀s∈S
f′(d,zv,θv)≤0,∀v∈V
(2)
式中:S(s=1,2,…,|S|)表示可能出现的情景的集合;φs表示每个情景出现的概率;V(v=1,2,…,|V|)表示超矩形顶点的集合。求解上述优化问题的主要难点在于,随着不确定参数数量的增多,需要考虑的超矩形的顶点数目呈指数型增长[11]。对于包含大量不确定操作参数的大规模优化问题,逐一计算2|V|个顶点的直接求解策略显然是不可行的[12]。由此,本研究提出了一种改进的迭代优化算法来求解这类问题,其具体步骤如下:
(1)选择一个包含有限个临界点θc的初始集合,其为全部顶点集合V的一个子集,仅将这部分选定的顶点上的可行性约束添加至模型中。
(2)求解含有柔性约束的随机规划问题,得到一个可行的设计d。
(3)固定设计变量,通过柔性评价判断该设计在整个不确定参数空间内的可行性:
(3)

柔性评价采用紧约束策略,直接求解max-min-max三层优化问题,规避逐个分析顶点导致的组合爆炸问题。
(4)若可行性函数χ(d)≤0,则模型通过柔性评价,表示该设计对于任意的θ∈T,都存在可行的操作,当前设计可行,算法终止;若可行性函数χ(d)>0,则将柔性评价问题中获得的新临界点添加到当前顶点集合中,返回步骤(2),再次求解,来获得新的设计。
由于超矩形顶点数量有限,该算法可以在有限步迭代内完成收敛。如果步骤(1)所选的顶点初始集合能够很好地预测模型的极端情况,则该算法仅需要一次迭代即可完成收敛。
3 氢气网络模型的建立
基于图1给出的氢气网络超结构,建立氢气网络设计的混合整数非线性规划(MINLP)模型。模型中涉及的所有集合索引、参数、变量等详见符号说明。
3.1 混合器和分离器的物料衡算
分别对氢公用工程、氢源、氢阱、燃料气系统、提纯装置和压缩机的进口混合器和出口分离器进行物料衡算。以氢公用工程为例,其物料衡算约束如式(4)所示。各操作单元的物料守恒约束会受到不同情景的影响。

∀h∈H,s∈S
(4)
式中:F表示流股定量,m3/h;Fh,m,s为第s种情景下由氢公用工程h流向提纯装置m的流量;Fh,s为第s种情景下氢公用工程h能够提供的氢气流量。
3.2 混合器的氢气衡算
对氢阱、提纯装置、燃料气系统和压缩机的氢气衡算与不同操作情景有关。流入氢阱的氢气纯度必须高于各氢阱的氢气纯度要求。在氢气平衡约束中,由于出现了流量与氢气纯度相乘的形式,因此产生了大量的双线性项。以氢阱为例,其氢气平衡约束如式(5)所示。


∀j∈J,s∈S
(5)
式中:Fh,j,s为第s种情景下由氢公用工程h流向氢阱j的流量;y表示氢气纯度,%;yh为氢公用工程h的氢气纯度; 上标P、R分别表示提纯装置的产品氢和尾氢。
3.3 提纯装置模型
提纯装置[如膜分离装置、变压吸附分离(PSA)装置]可以看作是由一个氢阱(进料流股)和两个氢源(出口产品氢和尾氢流股)组成。为简化模型,提纯装置的进出口压力、氢气回收率σm以及提纯装置的产品氢纯度可以被认为是恒定的[13]。值得注意的是,由于尾氢的流量和纯度是变量,导致在这些约束中也存在着双线性项。提纯装置m的数学模型如式(6)~式(10)所示。
(6)
(7)
(8)
(9)
Fm,s≤Fm,maxxm,∀m∈M,s∈S
(10)
3.4 压缩机模型
压缩机消耗大量的电能来提高氢气流股的压力,从而满足各个氢阱所设定的压力要求。压缩机的入口可以被看作是氢阱,其出口又可以被看作是氢源。新建压缩机的流量、氢气纯度、入口和出口设计压力都是需要进行决策和优化的变量。压缩机的质量平衡约束、压力限制约束、最大设计负荷约束和功率消耗约束如式(11)~式(14)所示。由于新建压缩机入口和出口的设计压力是优化变量,式(14)约束中包含了难以求解的线性分式项和多项式项,导致问题出现非凸性。Jagannath等[14]提出的启发式策略可以为新建压缩机分配出入口设计压力,通过启发式策略去除了这些非凸项之后,模型中的非线性形式仅限于双线性项。
(11)
(12)
Fc,s≤Fc,maxxc,∀c∈C,s∈S
(13)

∀c∈C,s∈S
(14)

3.5 压力约束与逻辑约束
仅当流股来源单元的压力大于或等于目的单元的压力时,气体流股才会从来源单元流向目的单元。引入二元变量xp,q来构造压力约束,其取值为1或0分别表示在单元p和单元q之间有或无管道连接。压力约束由式(17)和式(18)表示。O表示过程单元之间所有可能存在的连接的集合。
xp,q=0⟺Fp,q=0,∀(p,q)∈O
(15)
xp,q=1⟺Fp,q>0,∀(p,q)∈O
(16)
(17)
(18)
式中,上标U表示流量、压力、氢气纯度的上界。
此外,还应考虑一些逻辑约束来禁止某些单元模块之间的连接,如式(19)~式(21)所示。例如,由于来自化肥厂(FER)的氢气中含有较多的CO,易造成蜡油加氢和加氢裂化催化剂失活,所以来自化肥厂的氢气不允许输送到这些装置。同时,为了避免不合理的能量消耗,应避免将同一提纯装置产生的产品氢和尾氢在后续处理中进行混合。
xFER,c+xc,unit≤1
(19)
xFER,c+xc,c′+xc′,unit≤2
(20)
xPSAP,unit+xPSAR,unit≤1
(21)
上述过程约束是不同价格情景下随机规划问题的约束条件。此外,当考虑氢源氢气供给量和氢阱氢气需求量的波动时,还应向模型中添加柔性约束,以确保在操作层不确定参数的整个波动变化范围内操作的鲁棒性。
3.6 目标函数
氢气网络的集成设计与操作优化模型将氢气网络的年度总成本(Total Annualized Cost,TAC)作为目标函数,如式(22)所示,包括多情景操作方案下年度操作成本和年度投资建造成本,综合权衡了操作费用和投资费用。在操作成本中考虑了氢公用工程的年度消耗成本(CH2)、压缩机的年度电耗成本(Cpower)和燃料气的年度收益(Cfuel),如式(23)~式(26)所示。操作成本是第二阶段优化变量,其受到外部市场价格波动变化的影响。投资成本则是由压缩机年度投资成本(Ccomp)、提纯装置年度投资成本(Cpurifier)和管道的年度铺设成本(Cpipe)构成,按式(27)~式(30)进行计算。投资成本只涉及第一阶段的设计变量,不依赖于多情景的操作方案。
min TAC=CH2+Cpower-Cfuel+
A(Ccomp+Cpurifier+Cpipe)
(22)
(23)
(24)
∀c∈C,s∈S
(25)

HVCH4(1-yfuel,s)]Prob(s)
(26)
(27)
(28)
(29)
(30)
式中:TAC为年度总成本,美元;eh,s为不同情景下的氢公用工程价格,美元/m3;epowers为不同情景下的电价,美元/(kW·h);efuels为不同情景下的燃料气价格,美元/m3;Prob(s)为每种情景发生的概率;HV为标准燃烧热,J/m3;A为年化折算因子;r为年利率,%;λ为投资成本回收年限;C为成本,美元;t为年度操作时间,按8 000 h计;α为过程单元投资成本的固定关系数;β为过程单元投资成本的可变成本系数;二元变量x取值1或0表示某过程单元或管道是否存在;L为管道长度,m;u为管道中的气体流速,m/s。
4 求解策略
针对构建的MINLP形式氢气网络模型中因大量双线性项的存在产生的非凸性、存在多个局部最优解、难以收敛至全局最优的问题,本研究提出了基于多参数分解技术的全局优化算法。该算法将多参数分解技术严格地嵌套于混合整数线性规划(MILP)-非线性规划(NLP)双层迭代全局优化框架之中,在可控的问题规模和较少迭代次数内即可收敛至满足精度要求的全局最优解,具备求解大规模工程问题的应用潜力。
在氢气网络模型的全局优化策略中,首先,利用启发式方法为新建压缩机分配出入口压力,以消除压缩机模型中存在的线性分式项和多项式项,使氢气网络模型中存在的非线性仅限于双线性项;然后,利用基于多参数分解技术的凸松弛来构建原问题的下界问题;最后,提出在上界问题和下界问题之间迭代求解的严格的全局优化算法,迭代计算直至上下界收敛至设定的容差标准。
4.1 基于多参数分解技术的凸松弛
氢气网络模型中存在着大量流量(F)乘以氢气纯度(y)的双线性项F×y,用以描述氢气守恒约束中多个含氢流股的混合,在这里利用多参数分解技术(MDT)对双线性项进行处理。双线性项wFy=F×y可以用一系列混合整数线性约束进行替代,从而将原MINLP问题重构为一个MILP近似问题[15],式(31)~式(49)给出了原问题的下界问题最终的MILP形式。
(31)
(32)

∀k∈{0,…,9},l∈{p,…,P}
(33)
(34)
(35)
(36)
(37)
(38)
FL×Δy≤Δw≤FU×Δy
(39)
Δw≤(F-FL)×10p+FL×Δy
(40)
Δw≥(F-FU)×10p+FU×Δy
(41)
wFy≥FLy+yLF-FLyL
(42)
wFy≥FUy+yUF-FUyU
(43)
wFy≤FLy+yUF-FLyU
(44)
wFy≤FUy+yLF-FUyL
(45)
FL≤F≤FU
(46)
0≤Δy≤10q
(47)
zk,l∈{0,1},∀k∈{0,…,9},l∈{q,…,Q}
(48)
(49)

4.2 全局优化算法
提出了基于多参数分解技术的两层MILP-NLP全局优化算法,其主要思想是在多参数分解技术产生的下界问题和固定二元变量的原MINLP问题退化而来的NLP上界问题之间进行迭代。问题的上界和下界在每轮迭代中不断更新,直至上下界间隙收敛至设定的容差范围内。该全局优化算法的流程如图2所示,图中OLB和 OUB分别为问题的总体下界和总体上界,在迭代过程中更新;LB和 UB分别为每步迭代中求解的子问题的下界和上界。
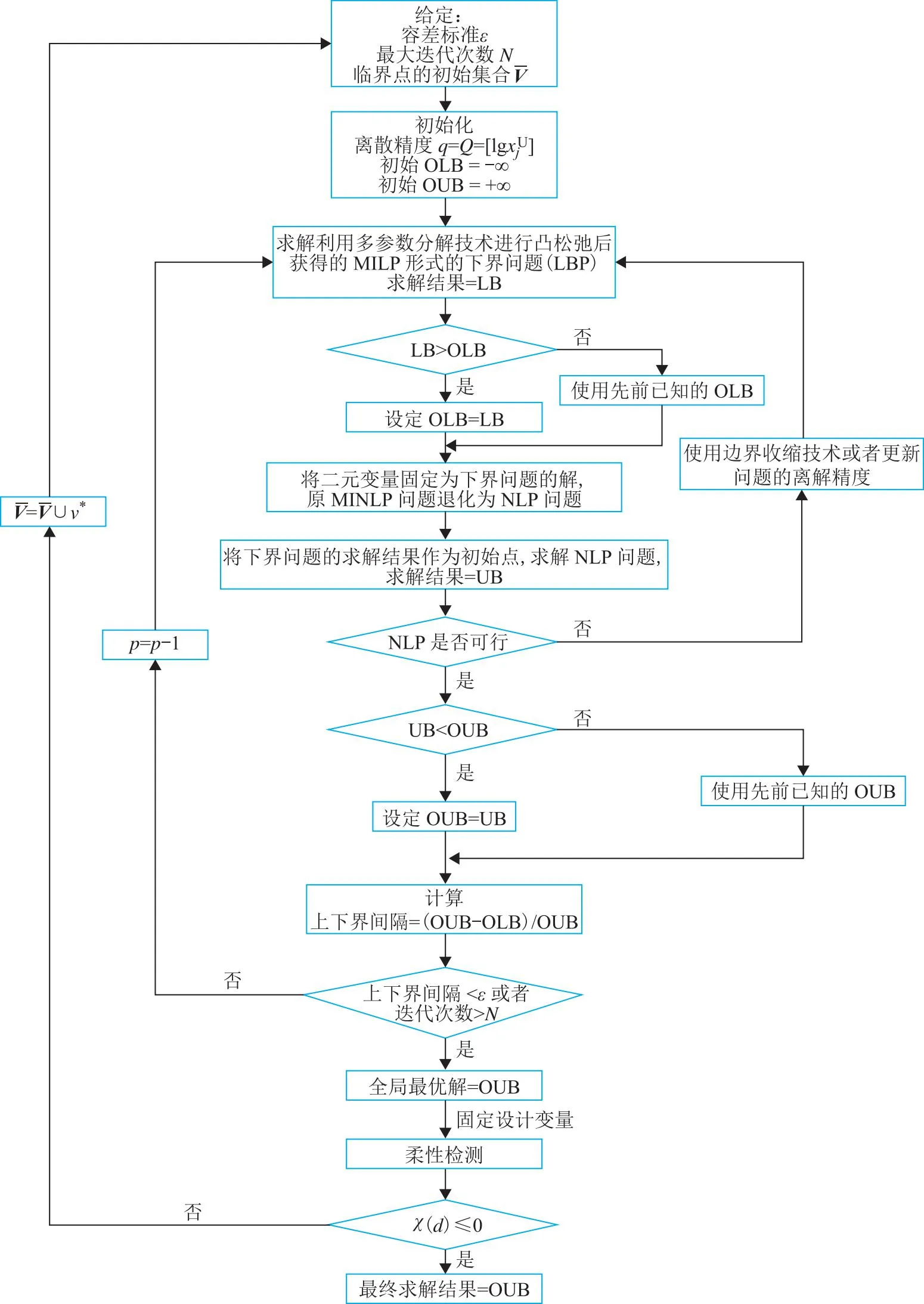
图2 基于多参数分解技术的全局优化算法流程
5 氢气网络工业案例
5.1 工业案例描述
在某炼油厂中,存在6个用氢单元,分别为催化裂化柴油加氢装置(CDHT)、直馏柴油加氢装置(SDHT)、柴油加氢装置(DHT)、喷气燃料加氢装置(KHT)、蜡油加氢装置(WHT)和加氢裂化装置(HC)。该炼油厂的氢源包括连续催化重整装置(CCR)、半再生催化重整装置(SCR)和6个用氢装置排放的含氢驰放气。外部的氢公用工程包含两个制氢厂(HP1和HP2)和一个副产氢气的化肥厂(FER)。受到外部市场不确定性的影响,氢气价格、电价和燃料气价格分别用3个离散的价格情景进行描述(低价格、中等价格和高价格),考虑价格波动的氢气网络随机规划模型共有27种组合的价格情景。而且,受原油品质、催化剂活性和炼油厂生产计划等因素的影响,在实际操作中,氢源氢气的供给量和氢阱氢气的需求量在标称值附近存在±10%的波动。
5.2 与传统优化模型的对比
VSS=TACdet-TACsto
(50)
(51)
式中:TACsto为通过两阶段随机规划计算得到的年度总成本,美元;TACdet为先将第一阶段设计变量固定为确定性优化模型的最优解,再求解相同随机规划问题所得到的年度总成本,美元。这意味着由确定性模型计算得到的氢气网络的拓扑结构需要同样置于变化的环境中进行评价。表1为3种优化模型的模型规模和求解结果,表2为3种优化模型的年度总成本、投资成本和操作成本对比。
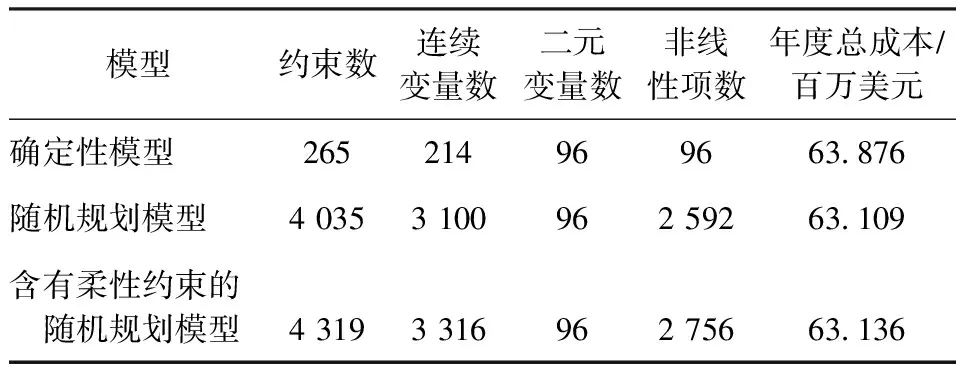
表1 3种优化模型的模型规模及求解结果
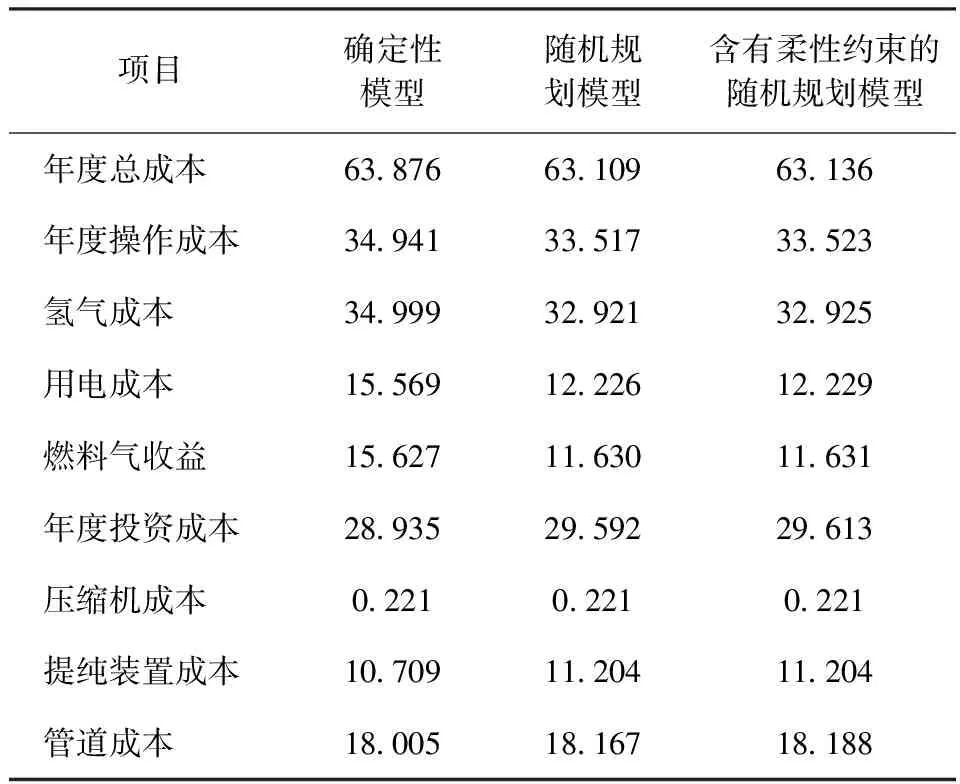
表2 3种优化模型的年度总成本、投资成本和操作成本对比 百万美元

由3种优化模型计算得到氢气系统最优网络设计以及随机规划模型得到的多情景操作方案如图3~图5所示。其中,图3为分别由确定性优化模型和随机规划模型计算得到的最优氢气网络设计。在该设计中,采取了部分措施以降低氢气网络的操作运行成本,如尽可能利用炼油厂内部催化重整装置副产重整氢,充分利用化肥厂高压廉价氢气,对加氢装置排放尾氢进行回收利用等,从而最大程度减少外部氢公用工程用量。CDHT装置和WHT装置排放的尾氢氢气纯度相对较高,经PSA装置提纯后进行回收利用;而其他加氢装置的低纯度驰放气则直接排入燃料气系统。图中的CP1,CP2,CP3表示3台压缩机。

图3 最优氢气网络设计结果
相较于确定性模型,随机规划模型可明显节省总成本,原因在于由随机规划模型得到的设计结果新增3条管线以提高过程操作的柔性,可以实施多情景柔性操作策略。两种模型设计结果的拓扑结构差异如图3(b)中虚线框所示。随机规划模型不仅给出了氢气网络拓扑结构的最优设计方案,也提供了不同价格情景下的最优生产策略,使其具有更高的柔性来应对外部市场的变化,灵活地调整操作策略从而获得最大经济效益。
以两种典型的价格情景为例,来说明随机规划模型的多情景柔性操作策略的优势,见图4。图中黑色虚线所示管线表示在该价格情景下的实际操作中某些管道中无气体流量。
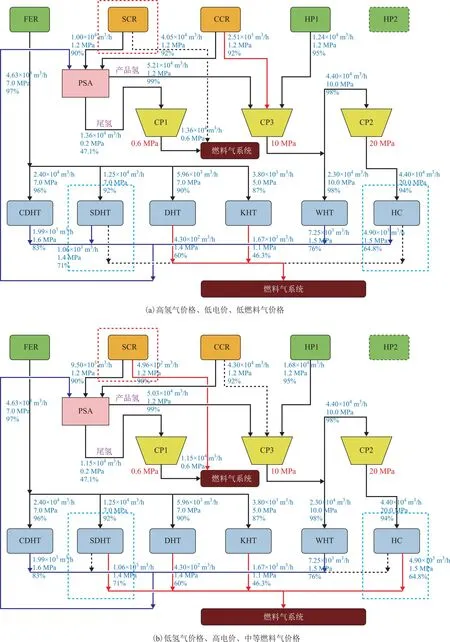
图4 不同价格情景下氢气网络的操作方案
由图4(a)可知,在氢气价格高、电价和燃料气价格低的外部市场环境下,充分进行氢气的回收利用成为了降低操作成本的关键举措。更多的加氢装置(CDHT,WHT,SDHT,HC)的含氢弛放尾气将进行循环回用,而不是直接燃烧。催化重整装置副产的氢气同样需要进一步提纯后输送至下游氢阱。在电价较低的情景下,使用压缩机是相对经济的,因而可以尽可能多地回收利用氢气纯度相对较高的加氢装置弛放气;相反,在氢气价格低、电价高的价格情景下,对氢气纯度较低的驰放气进行大量回收利用显然是不经济的,因为这会导致压缩机功率消耗大量增加。
由图4(b)可知,最经济的操作策略是将来源于SDHT和HC装置的中等纯度的含氢尾气直接排入燃料气系统,并从市场购买低价氢气作为补充。由此可知,新建管线和扩大某些装置的容量能够使这种灵活的生产操作方案得以实施,从而及时响应市场变化,获得更高的经济收益。
由包含柔性约束的随机规划模型计算得到的最优氢气网络设计如图5所示。除了外部市场价格的变化,含有柔性约束的随机规划模型还考虑了氢源氢气供给量和氢阱氢气需求量的波动。
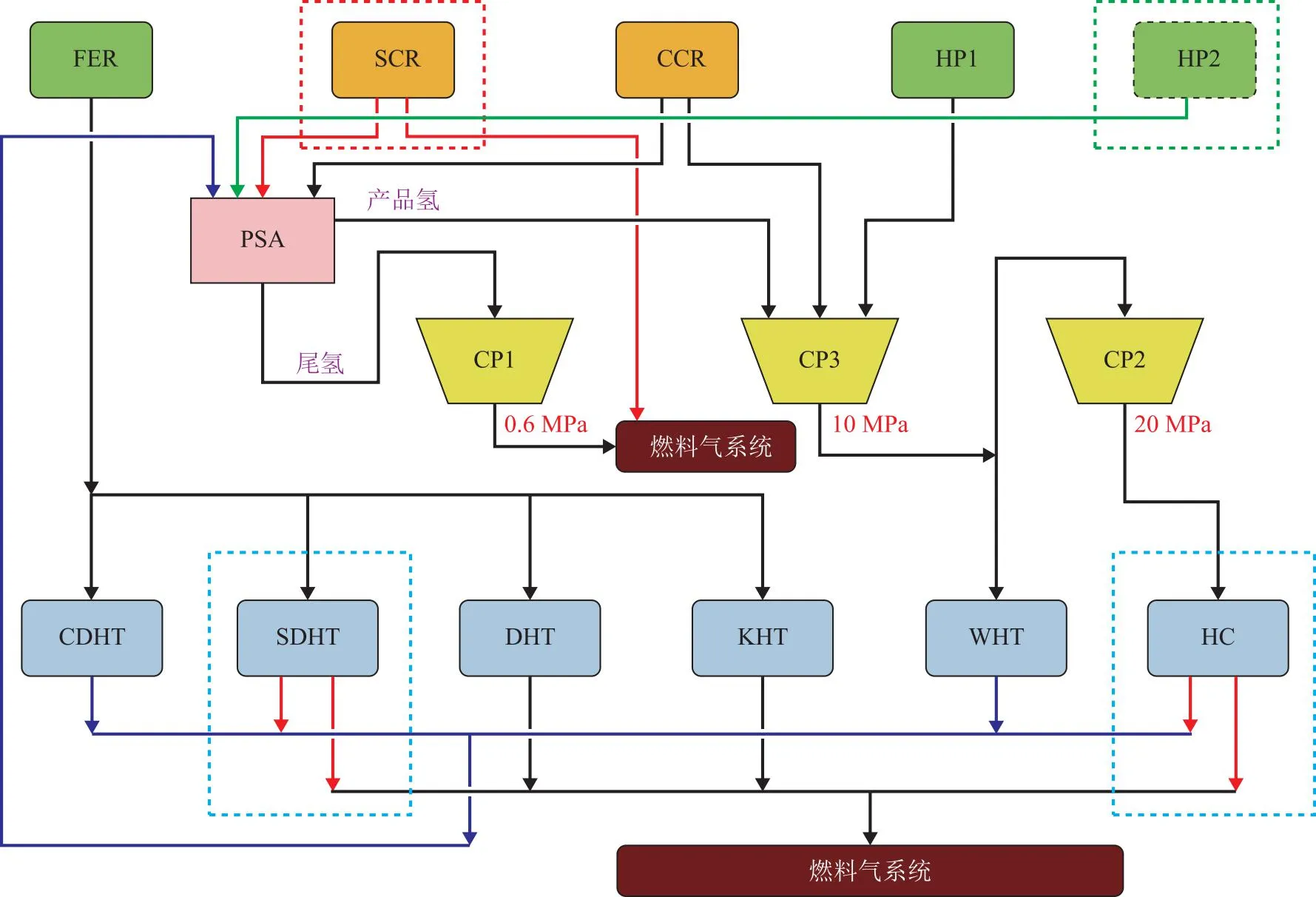
图5 包含柔性约束的随机规划模型计算得到的最优氢气网络设计
由图5可知,在含有柔性约束的随机规划模型得到的设计结果中,新增了一条从制氢厂2(HP2)连接至PSA装置的管道(图中绿色实线),以保证在极端操作条件下氢气供应的稳定性和油气产品的质量。相较于随机规划模型,虽然该模型在总成本上略有上升,但却可以保证操作过程的鲁棒性。因此,包含柔性约束的随机规划模型不仅表现出较高的经济效益,而且可以在极端操作点下确保操作的可行性,以防因氢源/氢阱的氢气供/需量波动而产生严重后果。
5.3 全局优化算法的计算性能分析
本研究提出的建模方法与优化算法均利用GAMS 24.9.2实现编程,所有运算均由一台CPU型号为Intel Core i7-7700、内存为16.0 GB 的台式计算机完成。全局优化算法具体操作如下:利用多参数分解技术对原MINLP问题进行凸松弛后获得的MILP问题是原MINLP问题的一个下界问题;固定二元变量后得到的NLP问题是原MINLP问题的一个上界问题。利用全局优化算法在MILP下界问题和NLP上界问题之间进行迭代求解,迭代计算直至上下界收敛至设定的容差标准,即可获得原MINLP问题的一个全局最优解。由多参数分解技术凸松弛后获得的MILP下界问题由求解器CPLEX 12.7进行求解,然后利用MILP问题的求解结果初始化模型的变量值,再使用求解器IPOPT 3.12来求解固定二元变量后得到的NLP问题,进行算法的迭代。
利用含有柔性约束的随机规划模型来验证上述算法的计算效果。表3为全局优化算法的迭代过程、收敛情况以及计算结果。

表3 全局优化算法迭代过程及收敛情况
由表3可以看出:在第一次迭代后,上下界之间的相对间隙就收敛到7%以内;在3次迭代完成后,上下界的相对间隙收敛到0.01%,达到算法终止的容差要求,说明该算法在较少的迭代次数和合理的运算时间内就可以完成算法的收敛。
同时,使用求解器DICOPT[17],BARON[18],ANTIGONE 1.1[19]直接求解原MINLP问题,并与本研究的全局优化算法进行比较。DICOPT是基于等式松弛策略外部逼近算法的拓展,可求解非凸 MINLP问题,但其只能保证对凸问题收敛到全局最优解;BARON和ANTIGONE 1.1包含严格的MINLP问题全局优化算法,可保证非凸问题的全局收敛性。其中,BARON是一款性能强大的MINLP求解器,执行确定性分支定界类型的全局优化算法。
表4为本研究所提出的全局优化算法与MINLP商用求解器的计算性能对比结果。由表4可知:对于该问题,DICOPT求解器陷入了局部不可行,ANTIGONE求解器在100 000 s的限制求解时间内无法找到可行解;BARON求解器表现出较好的计算性能,在设定的运算时间内,找到了一个可行的整数解,但相对间隙为7.21%,间隙仍然较大且难以继续收敛;本研究提出的全局优化算法在解的质量、相对间隙、求解时间等方面都明显优于上述MINLP商用求解器,说明其对包含大量双线性项的大规模氢气网络问题具有优异的计算性能。

表4 MINLP商用求解器与本研究提出的全局优化算法计算结果比较
6 结 论
(1)针对炼油厂大规模氢气网络设计中存在的外部市场变化和操作参数波动等多种不确定因素,提出了融合柔性约束的随机规划建模框架。在该建模框架中,利用两阶段随机规划处理变化的氢气价格、电价和燃料气价格等外部市场不确定因素,利用柔性约束以更加鲁棒的方式处理操作层面的不确定因素。因此,该融合柔性约束的随机规划模型是集成了两种不确定性优化理论的建模方法,在过程经济性与操作鲁棒性间实现了最优的权衡,最优化经济期望的同时确保了操作过程的鲁棒性。
(2)针对所构建氢气网络模型中存在大量双线性项的问题,提出了基于多参数分解技术的全局优化算法,在可控的问题规模和较少的迭代次数内即可获得高质量的全局优化解。与传统确定性模型和标准随机规划模型相比,柔性约束与随机规划融合模型的设计结果可以在复杂氢气网络间进行氢气资源的灵活回收和梯级匹配,在对氢气网络挖潜增效的同时,确保了生产操作的平稳性和安全性。
(3)对于求解含大量双线性项的氢气网络模型问题,本研究提出的全局优化算法在解的质量、相对间隙、求解时间等方面都明显优于DICOPT,ANTIGONE,BARON等MINLP商用求解器,说明该全局优化算法对包含大量双线性项的过程网络问题具有优异的计算性能。因此可推断,该全局优化算法具有拓展应用于其他含有大量双线性项的问题求解的潜力,如水网络、换热网络等过程网络的优化设计和油品调合等。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
金桥(2018年4期)2018-09-26
电源技术(2015年7期)2015-08-22
医学研究杂志(2015年12期)2015-06-10
中国卫生(2014年5期)2014-11-10
压缩机技术(2014年3期)2014-02-28