面向城市轨道交通列车控制系统的车车通信技术探讨
2024-01-02 11:42龚泰源赵红礼蒋海林李宗平
都市快轨交通 2023年6期
朱 力,唐 涛,龚泰源,梁 豪,赵红礼,蒋海林,李宗平
(1.北京交通大学轨道交通控制与安全国家重点实验室,北京 100044;2.交控科技股份有限公司,北京 100070)
0 引言
随着经济的发展和城市化进程的推进,轨道交通已成为现代都市不可或缺的公共交通方式。其中,基于通信的列车运行控制系统(communication-based train control,CBTC)在城市轨道交通领域得到广泛应用。CBTC 系统中常使用无线局域网(wireless local area network,WLAN)技术实现列车与地面的通信,使用802.11 标准在2.4 GHz 频段传输数据。然而,随着全自动运行和智慧地铁的兴起,WLAN 技术面临着速度低、覆盖范围有限、链路设计复杂、无线干扰频发和资源调度低效等问题,无法满足安全性和服务质量的要求。此外,CBTC 的系统架构也备受关注,设备数量繁多、结构繁杂,增加了系统复杂度和维护成本。同时,列车间缺乏直接通信链路,依赖轨旁设备传输核心数据,导致额外的系统延迟和潜在故障风险。
相比于WLAN 技术,长期演进(long term evolution,LTE)系统具备更高的数据传输速率和更低的系统延迟。国际铁路联盟早在2010 年之前就指出,LTE 网络可以成为未来铁路无线通信的媒介。其中,设备到设备(device-to-device,D2D)通信技术是一种直接通信技术,可以让设备之间直接通信,建立和通信资源调度由基站集中控制。这为城市轨道交通技术的发展提供了车车通信的可能性。因此,研究人员提出将车车(train-to-train,T2T)通信融入CBTC 系统中,以进一步提高列车的安全性。早在2007 年,Garcia 等研究了列车避障系统,实现了T2T 通信,大大降低了列车相撞的风险[1]。文献[2]对D2D 技术在城市轨道交通无线通信系统中的应用进行了分析,并提出了一种基于D2D 的列车运行控制系统,旨在减少地面设备实现列车间通信,缩短系统反应时间和减少设备接口数量。基于法国里尔1 号线的CBTC 系统模型,文献[3]提出了一种新型CBTC 系统,实现列车间直接通信。文献[4]将T2T 通信引入高速铁路和城市轨道交通的下一代通信方案中。
在我国地铁领域,基于车车通信的列控系统已有相关研究。例如,交控科技提出的基于车车通信的列车控制系统(vehicle-to-vehicle communication based train control system,VBTC)通过通信资源的按需分配和列车运行的协同控制,实现了列车自主运行控制[5],上海富欣智控与青岛四方车辆研究所共同研发的基于车车通信的列车自主运行系统(train autonomous circumambulate system,TACS)已在青岛地铁6 号线成功上线调试[6]。以车车通信为核心的列控系统突破了传统CBTC 系统仅以地面设备为中心的列车操纵方法,调整了系统架构并加强了系统功能,推动了地铁全自动运行技术向基于车车通信的自主运行方向的发展。
基于车车通信的列车运行控制技术不仅提供了安全可靠的通信链路,满足了CBTC 系统对安全性和可靠性的要求,同时提供了更高效、多样化和经济的技术方案。因此,本文深入探讨了基于车车通信技术的列车运行控制系统。首先介绍了系统架构和关键技术,然后综述了当前主流的基于逻辑点对点和物理点对点的车车通信技术,最后结合城市轨道交通车车通信的典型运行场景进行了传输距离的计算与分析,并基于列车运行安全和通信质量给出了车车通信模式选择的建议。希望本文的研究可为城市轨道交通列车运行控制系统中的车车通信系统设计和技术应用提供参考和理论依据。
1 基于车车通信的列车运行控制系统基本原理
基于车车通信的列车运行控制系统(简称“列控系统”)是一种先进的列车运行系统,以具备车车通信能力的列车为核心,并通过列车控制系统与车载网络控制系统、牵引系统和制动系统等高度融合,实现列车主动进路、自主防护、自主运行等技术功能。相较于传统CBTC 系统,该系统不仅具有更高的安全性、可靠性和运营效率,而且建设和运营成本更低。基于车车通信的列车运行控制系统的推广,实现了列车控制从集中控制到分布式控制、从列车自动运行到自主运行技术的转变,是未来列控系统发展的重要方向。
基于车车通信的列控系统以列车自主运行计算为中枢,选用了扁平化的系统框架,在保障传统CBTC运行安全性的条件下,将轨旁联锁设备(computer interlocking,CI)和区域控制设备(zone controller,ZC)的职责下沉至列车设备上,并通过车车通信实现列车主动进路和自主防护等功能。该系统框架化简了轨旁设备设置,优化了各子系统间接口设计,缩减了系统复杂度和维护成本,同时提高了系统的实时性和可靠性,有力地降低了建设和运营维护的投入。如图1所示,基于车车通信的列控系统架构主要分为4 个部分:列车自动监控系统(automatic train supervision,ATS)中心、地面对象控制器(object controller,OC)、车载控制器(on-board controller,OBC)以及数据通信系统(data communication system,DCS)。
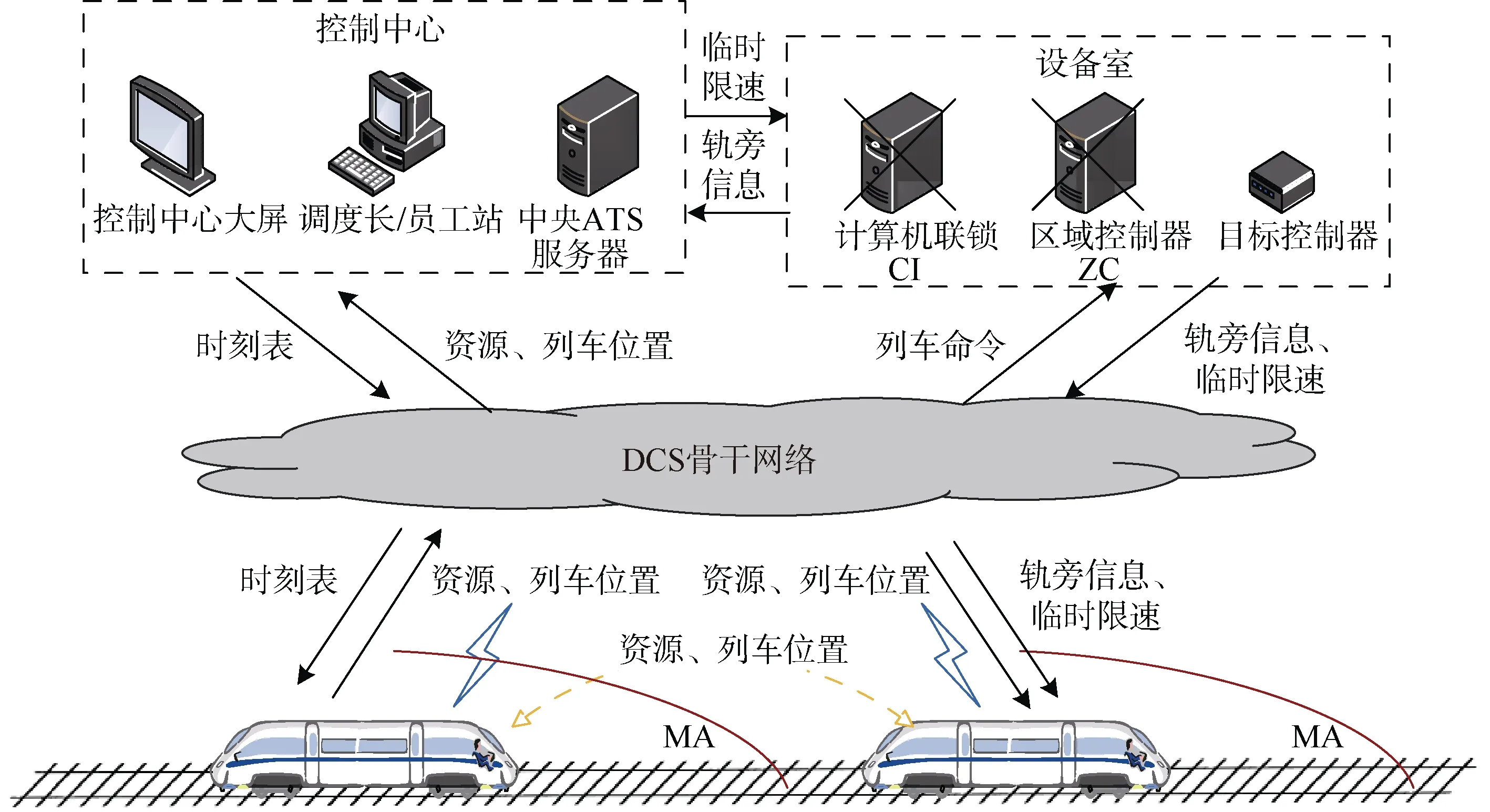
图1 基于车车通信的列车运行控制系统架构Figure 1 Architecture of train operation control system based on train-to-train communication
基于车车通信的列控系统具体的控制流程包括:列车从中央ATS获取预先编排好的时刻表运行图或实时人工进路;OC 及时记录列车信息和道岔进路等资源占用情况,并向列车反馈执行列车控制命令;当列车在正线行驶时,OBC 直接向邻车通信以获取位置,获得邻车区段资源占用和释放信息,向邻车申请资源占用,同时向OC 报告登记位置和查询道岔区段等实体资源的占用情况;根据自主计算的进路,列车通过车载控制单元、牵引控制单元和制动控制单元计算列车运行曲线,并进行精准控制;OC 监测和控制实体资源状态,同时接收来自控制中心下达的临时操作命令[7]。
基于车车通信技术的列控系统颠覆了传统区域控制器集中式的列车运行控制方式,通过车车通信技术直接进行信息传输实现列车运行控制,并在传统CBTC系统基础上重新分配系统功能,强调列车依靠自身感知手段来实现列车安全和高效的运行控制。借助列车间的直接通信,当前列车能够获取前车的实时状态信息,包括位置、速度和加速度等。通过对前车行驶曲线的预测,可以计算出两车之间不会发生位移重合的安全防护速度。在保证列车前后方安全距离的基础上,实现两列相邻的列车以允许的最大速度和较小间隔运行,这一技术创新为列车运行的安全性和效率提供了重要保障。利用车车通信技术,该列控系统正线追踪间隔最小可达到80 s,相比CBTC系统可缩短11%;折返间隔最小可达到85 s,相比CBTC 系统可降低29%,这大幅提升了运营效率[8]。
2 面向列车运行控制系统的车车通信技术
2.1 基于逻辑点对点传输的
车车通信技术
基于逻辑点对点传输的车车通信技术主要是指在系统中,一列车只需要知道另一列车的逻辑IP,就可以通过基站和核心网转发实现的车车通信技术。图2 是基于逻辑点对点传输的示意图,前车将位置、速度等信息上传至轨旁基站,基站通过骨干网络转发的方式,转发至后车所在基站位置。随后基站通过与后车通信的方式告知前车位置、速度。
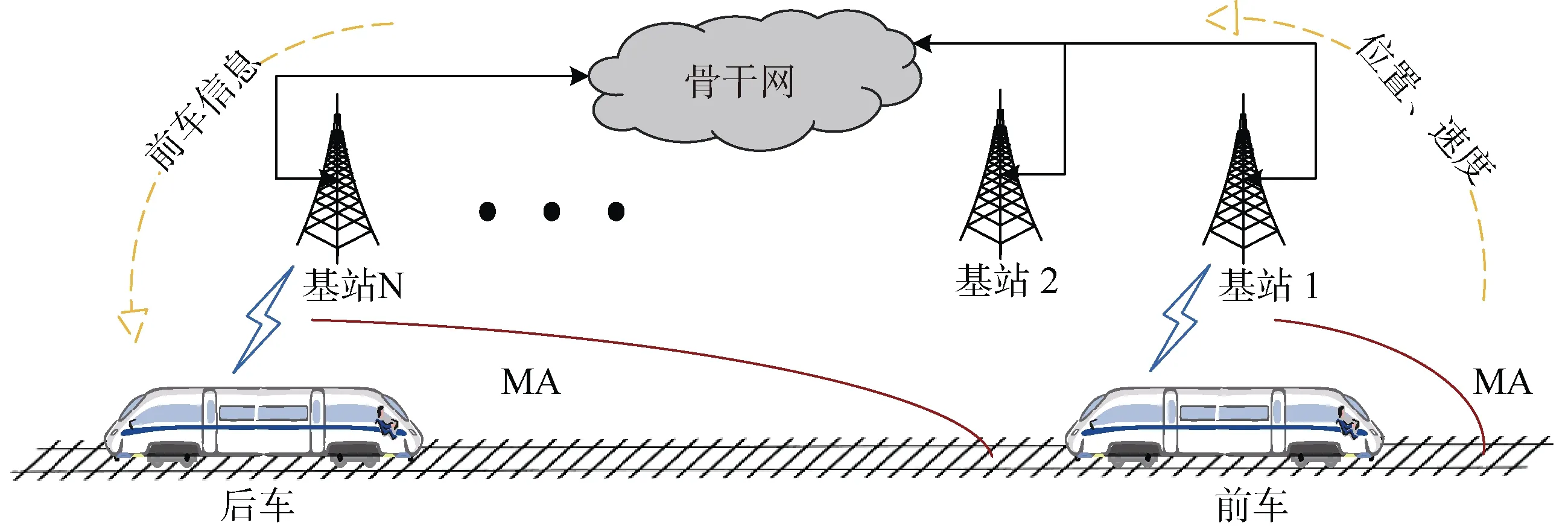
图2 基于逻辑点对点传输的车车通信示意Figure 2 Schematic illustration of train-to-train communication based on logical point-to-point transmission
由于目前轨道交通数据通信系统的车辆都有逻辑IP,因此现有的数据通信系统都支持基于逻辑点对点传输的车车通信系统。具体的通信技术包含以下3 种。
2.1.1 WLAN 技术
无线局域网(WLAN)是一种无线计算机网络,其基本构成为站点、基本服务单元(basic service set,BSS)、分配系统(distribution system,DS)、接入点(access point,AP)、扩展服务单元(extended service set,ESS)和关口(portal)。WLAN 已经经历了从802.11 的2Mbps带宽到802.11ax 的多用户MIMO 和9.6Gbps 通道带宽等多个版本的技术发展,使其具备了强大的通信能力。随着新技术的应用,地铁控制系统也越来越多地采用数据通信,并常常采用WLAN 构建地面和列车之间的无线链路。此外,一些服务应用于列车上,如乘客信息服务系统(passenger information system,PIS),也开始使用WLAN 技术,主要用于车厢监控、车载电视等服务。
通过WLAN,列车与地面设备相连,列车将信息传输至地面设备后,地面设备转发该信息至目标车辆所在区域的地面设备,随后再经WLAN 传输数据至目标列车,形成基于逻辑点对点的车车通信。
2.1.2 LTE 技术
LTE 是一种无线数据通信标准,旨在提供更高的数据传输速率、更低的延迟和更好的用户体验。该技术采用正交频分复用(orthogonal frequency division multiplexing,OFDM)和多输入多输出(multiple-input multiple-output,MIMO)等关键技术,显著提高了频谱效率和数据传输速率。《城市轨道交通车地综合通信系统(LTE-M)规范》是一个基于时分长期演进(TD-LTE)技术的通信规范[9],其主要设计目标是满足城市轨道交通的综合业务需求。相较于公用的LTE 系统,LTE-M有很多优势,如较小的传输延迟、较少的专用频段干扰、多层次的优先级调度配置,以及认证与密钥协商协议(authentication and key agreement,AKA)、安全防护机制和自动频率调整等,这些优势有助于保证城市轨道交通的安全和效率。
LTE-M 技术被广泛应用于城市轨道交通车地通信领域,相比传统的WLAN 车地无线通信技术,它具有移动接入性强、传输速率高、稳定性和抗干扰能力强等优点。在国内,武汉地铁6 号线于2016 年12 月28 日开通运营,成为首条采用LTE 承载CBTC 业务的城市轨道交通线路。南京宁高城际于2017 年12 月30 日开通运营,是国内首条速度目标值为120 km/h,LTE-M 综合承载CBTC、PIS、车载CCTV、TCMS 业务的线路。
2.1.3 5G 技术
第五代移动通信技术(5th generation mobile networks或5th generation wireless systems,简称5G)是最新的移动通信技术。它的性能目标是高速率数据传输、低延迟、省电、降低成本、提高系统容量和大规模设备连接。5G 的无线接入技术是NR(new radio),它支持更高的带宽、更高的速度和更低的延迟。大规模天线技术可以提高网络容量、覆盖范围和信号质量。5G 将支持更多的设备连接,同时提高网络效率和性能。此外,网络功能虚拟化和软件定义网络也将带来更高的灵活性和可编程性,从而加速网络创新。
目前,轨道交通正在逐步采用5G 技术实现车辆之间的点对点通信。例如,2019 年,深圳地铁已经使用5G 技术实现了车载数据的车地传输,通过增加小型智能5G 终端设备在列车和车站、停车场、车辆段等地,实现车辆之间数据的及时传输。2020 年,南京地铁2 号线在马群车辆段建设了5G 实验基站,用于承载地铁车辆综合业务。5G 传输技术将大大增强数据传输的时效性,例如,对于每天信号系统的车载日志,实现了秒级下载。
2.2 基于物理点对点传输的车车通信技术
基于物理点对点传输的车车通信技术主要是指车与车之间不经过任何基站转发的点对点传输,前车不经过地面基站而直接通过车—车点对点通信的方式向后车传输关键信息。图3 是基于物理点对点传输示意。

图3 基于物理点对点传输的车车通信示意Figure 3 Schematic illustration of train-to-train communication based on physical point-to-point transmission
目前支持实现物理点对点车车通信的技术主要指的是蜂窝网的设备到设备通信(device-to-device,D2D)技术以及车联网的车车通信(vehicle-to-vehicle,V2V)技术,具体包括以下3 种。
2.2.1 LTE 系统的D2D 技术
D2D 技术是LTE R12 版本中推出的一种技术,它允许在蜂窝网络基站的控制下,用户设备直接使用小区内的传统蜂窝用户频谱资源进行通信[10]。与传统的设备直连技术(如ZigBee)和蓝牙相比,D2D 用户终端能够借用部分蜂窝网络的存储空间、频谱和硬件资源,这使得D2D 通信在可靠性和性能上都得到了显著的提升。铁路移动通信领域尤其关注D2D 通信技术的无中心化特点,基于这一特点,可以进一步提高列控系统的资源管理效率,减少额外的信令交互导致的时延开销。
近年来,D2D 通信在列车通信中的应用越来越受到关注,被称为T2T(train-to-train)通信。列车控制系统通过使用车对车的通信系统,能够减少对地面设备子系统的依赖,同时将部分地面设备和功能集成到列车本身中。这种车车通信方式能够提高列车控制反应能力,满足列车智能驾驶等功能的时延需求[11]。相比传统的车—地—车通信方式,车车通信方式减少了通信的中间过程,因此是下一代列车控制系统的关键技术之一。
2.2.2 5G NR 系统的D2D 技术
作为关键候选技术,D2D 在面向5G 网络的应用中受到广泛关注,其具有提高系统性能、优化用户体验、扩展蜂窝通信应用等潜在优势。在5G 的D2D 场景中,网络仅需配备一个全向天线基站,从而降低系统架构的复杂度。该网络采用OFDM 技术,将频谱资源分割为一系列正交子载波,以此减少用户间的互相干扰。在此网络中,用户分为两种类型:传统蜂窝用户和D2D 用户。传统蜂窝用户通过基站通信,而D2D用户之间可以直接通信,也可以与基站通信,能够在两种通信模式之间自由切换。
车车通信中基于5G 的T2T 通信备受关注,因为它能够降低车辆之间的通信延迟,提高传输速率,特别是当车辆距离较近时,无须通过基站或轨旁单元的转发。此外,还可通过列车之间的直接通信获得相邻列车的行车信息。这种通信方式可以增加后车获取前车位置信息的通信渠道,增强列车的主动防护能力,同时还能有效提高运营效率,保障列车的安全运营[12]。
2.2.3 面向车联网应用的V2V 技术
车联网通信技术标准主要分为两类:以美国为主导的西方国家采用的专用短程通信技术(dedicated short range communication,DSRC)标准和中国提出的蜂窝车联网技术(cellular vehicle to everything,C-V2X)标准。DSRC 主要涉及射频识别(radio frequency identification,RFID)、超宽带(ultra wide band,UWB)、无线保真(wireless-fidelity,WIFI)等通信技术,而C-V2X则以4G-LTE、5G 等蜂窝移动通信技术为基础。尽管这两类通信技术是专用于车联网场景,但如何将其应用于轨道交通相关场景成为车联网技术发展的重点[13]。
DSRC 系统主要由车载单元(on-board unit,OBU)和路边单元(roadside unit,RSU)构成,信息在OBU 和RSU 之间实现双向传输,交通信息通过RSU 传送至车联网系统平台。目前,DSRC 技术的最典型应用是在我国各大高速出入口、无人收费停车场等场景的电子不停车收费系统(electronic toll collection,ETC)。
C-V2X 技术标准于2015 年由3GPP 立项启动,由中国主导完成。C-V2X 包括两种技术标准:基于4G移动蜂窝网的LTE-V2X 和基于5G 的NR-V2X。它适用于车速最高可达500 km/h、最大信息传输速率为500 Mbps、传输时延低于10 ms、传输距离可达1 000 m以上的车联网系统。C-V2X 主要依赖基站部署,并通过终端与基站之间的Uu 接口和终端与终端之间的PC5接口提供车联网通信服务,实现大带宽、大覆盖、低时延和高可靠性。
3 面向列控系统的车车通信传输距离分析
在列控系统中,车车通信距离对列车运行控制的安全至关重要。车车通信具体选择基于物理点对点的车车通信或是逻辑点对点的车车通信方式取决于车与车之间的通信距离。因此,本节从距离出发,分析车车通信的距离极限。
3.1 基于逻辑点对点的车车通信传输距离分析
逻辑点对点车车通信传输的距离理论上可以是无限的,车车通信经骨干网络传输。但车与基站的通信距离受限,因此本小节对车与基站之间的通信距离极限进行建模计算。本文以经典的信道传播模型为例,计算在不同传输媒介下,列车与基站之间的通信距离极限。
3.1.1 基于自由空间传输的车地传输距离计算
由于车辆运行环境复杂,传统的自由空间损耗模型难以良好地反映列车信号损耗情况,因此本文采用经典的COST231-Hata 传播模型作为车车通信的传播模型,计算车车通信的最大传输距离。
COST231-Hata 模型是一种广泛使用的室外移动通信信号传播模型,适用于频率在800 MHz 到2 GHz之间的城市或郊区环境中的大范围信号传播。该模型可用于铁路环境下的无线电波传播损耗预测[14],在该模型中,传播损耗建模为:
式中,fc为频率。由于目前全国各地城市轨道交通的专用频点分配都在2 GHz 以下,其中1.8 GHz 是当前北京市的专用频点,1.4 GHz 是专用频点的一个重要可选项,因此本文重点考虑1.4 GHz 和1.8 GHz 两种频率。ht和hr分别为发射、接收天线的高度,m;d为车—地直线距离,km;Cm为地物模型矫正因子,对于大城市取3 dB,小城市、郊区、农村等环境取0 dB;α(hr)是有效天线修正因子,可表示为
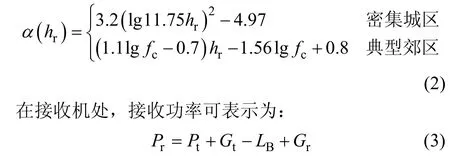
式中,Pt为发射机的发射功率,dB,Gt和Gr分别为发射和接收天线增益,dBi;LB为传输损耗,dB。
考虑在典型郊区中考察车地传输距离,由于车地通信属于上行受限,因此本文以车向地面发送信息为考察样点。设Pt=23 dBm,Gt=7.5 dBi,Gr=15 dBi,车载发射及接收天线各有5.5 dB 的功分、馈线等综合损耗,车载天线高4.8 m,基站天线高30 m,基站接收机最大灵敏度为-120 dBm,并预留10 dBm 余量。可得出接收功率与车车距离关系如图4 所示。
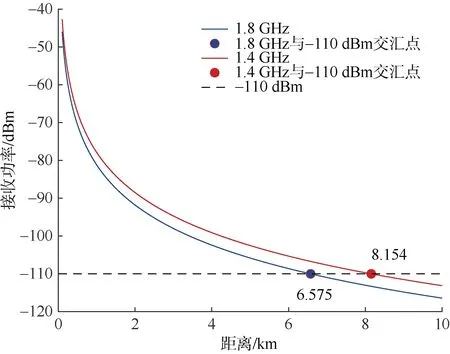
图4 逻辑点对点传输下车车通信距离与接收功率关系Figure 4 Correlation between communication distance for disembarking from the vehicle and received power in logical point-to-point transmission
根据曲线与-110 dBm 交汇点可知,在郊区时,1.8 GHz 下车地通信距离在6.575 km 时达到-110 dBm考察点,1.4 GHz 下车地通信距离在8.154 km 时达到-110 dBm 考察点。
3.1.2 基于漏泄同轴电缆传播的车地传输距离计算
在隧道中,车地通信同样可以采用漏泄同轴电缆传输。漏缆处于单模辐射状态,其使用频带指的是高阶模处于非辐射状态时的频率范围,而截止频率则是为了避免高阶模产生而设定的最大频率[15],计算公式如下所示:
式中,c 为光速,m/s;εr是绝缘层相对介电常数;d为内导体的等效直径,m;D为外导体的等效直径,m。隧道覆盖常用的漏缆型号有13/8 漏缆及5/4 漏缆,其理论截止频率约为2.8 GHz 和3.6 GHz。因此,1.8 GHz频段的信号可以在这两种漏缆里传输。根据文献[16],漏缆的损耗可表示为:
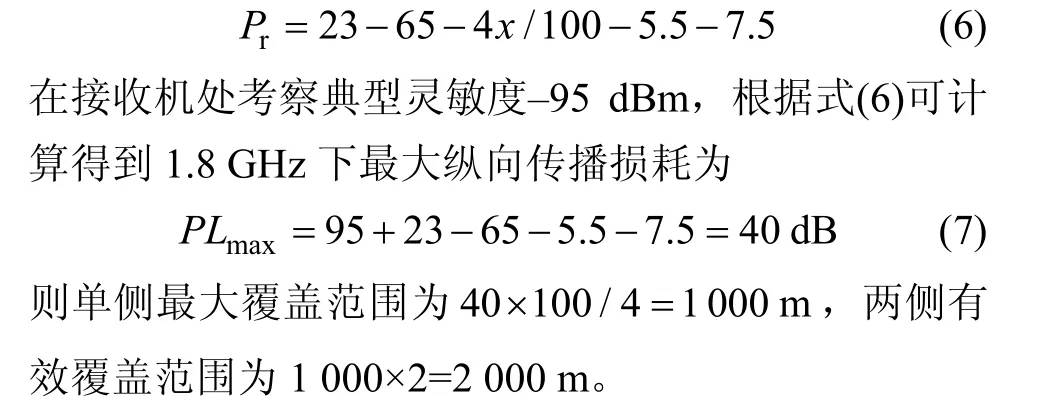
式中,PLt为漏缆的传输损耗,PLc为漏缆的耦合损耗。在1.8 GHz 下,漏缆的传输损耗为4 dB/100 m,耦合损耗为65 dB(距离1.5 m 时)。考虑列车的发射功率为23 dBm,车上功分损耗为5.5 dB,地面漏缆合路器损耗为7.5 dB,设单侧覆盖距离为x,单位m,在接收机处接收功率为
3.1.3 基于波导管传播的车地传输距离计算
波导管与漏缆类似,是一种电磁波传输媒介,用于地铁隧道信号覆盖[17]。在隧道内覆盖时,波导管的布设方式与漏缆相同。设耦合损耗为65 dB(距离40 cm时),传输损耗为2.2 dB/100 m。考虑列车的发射功率为23 dBm,车上功分损耗为5.5 dB,地面漏缆合路器损耗为7.5 dB,当接收机的灵敏度为-95 dBm 时,在满足接收机灵敏度要求前提下,允许最大纵向传输损耗为
则单侧最大覆盖范围为40 × 1 00/2.2 = 1818.2 m ,两侧有效覆盖范围为1 818.2×2=3 636.4 m。
3.2 基于物理点对点传输的车车通信传输距离分析
车车直接通信时,列车之间距离将直接影响通信质量。列车间距不仅影响通信质量,也关乎列车运行安全。因此本小节对车车物理点对点直接通信的通信距离进行分析。
3.2.1 非隧道区域
当完全没有障碍物时,在LOS 情况下,路径损耗为自由空间损耗,计算公式如式(9)所示
式中,f为频率,MHz;d为距离,m。为了获取更好的通信质量,第一菲涅尔区内应尽量避免设置障碍物。如图5 所示,由于车车直接通信时,在第一菲涅尔区内的障碍通常是地面,因此地面带来的多径反射将导致信号衰减。
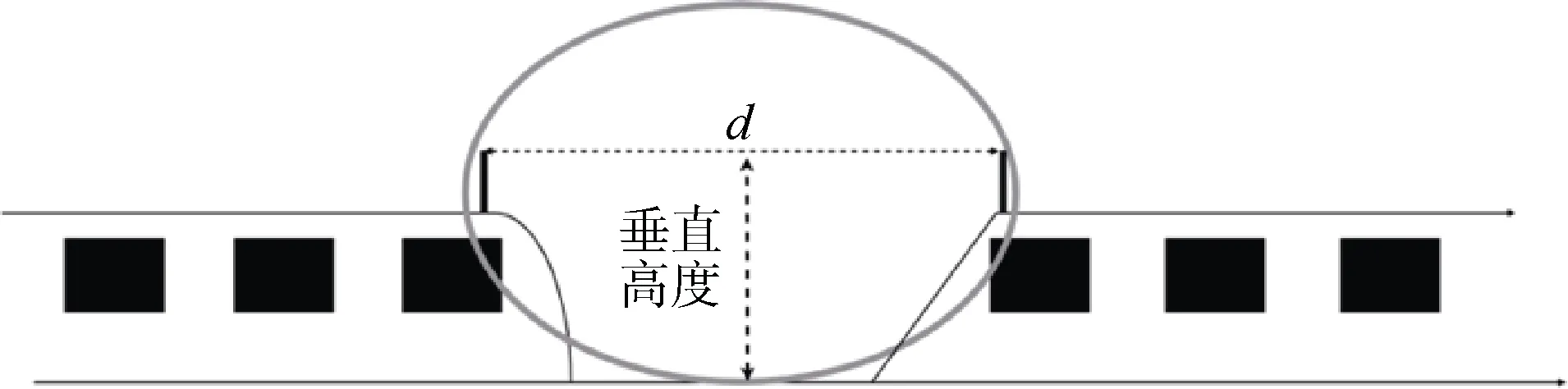
图5 列车车顶天线与第一菲涅尔区示意Figure 5 Schematic illustration of train roof antenna and first Fresnel zone菲涅尔椭球的横截面半径由式(10)给出
式中,d1和d2分别为从横截面到发射器和接收器的纵向距离。当d=d1+d2且d1=d2时,为自由空间条件下最大传播距离,。列车通信天线通常被安装于距离地面4.8 m 的地方,因此可以通过式(10)计算得到。当列车采用1.8 GHz 通信时,在553.3 m 内都可以直接使用式(10)模型进行自由空间损耗的估计,在调车场、郊区等列车间可实现LOS 的情况下,均可以使用式(10)模型对信号衰减进行粗略估计。
车车直接通信环境较为复杂,简单的自由空间损耗模型难以反映实际情况。本文进一步采用经典的COST231-Hata 传播模型作为车车通信的传播模型,计算车车通信的最大传输距离。根据式(2)和(3),设Pt=23 dBm,Gt=9.5 dBi,Gr=9.5 dBi,车载发射及接收天线各有5.5 dB 的功分、馈线等综合损耗,车载天线高度为4.8 m,接收机灵敏度为-105 dBm 并预留10 dBm 余量,可得出接收功率与车车距离关系图(见图6)。
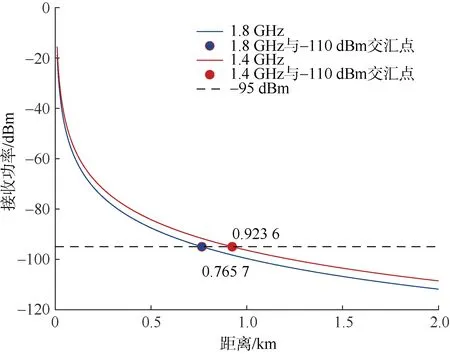
图6 物理点对点传输下车车通信距离与接收功率关系Figure 6 Correlation between communication distance and received power in physical point-to-point transmission
以典型接收灵敏度-95 dBm 为考察样点,1.8 GHz下,车车通信距离约为765.7 m;1.4 GHz 下,车车通信距离约为923.6 m。
3.2.2 隧道区域
列车在隧道中的通信同样关键。在隧道中,传播模型应使用修正后的模型。文献[18]提出了分段传播模型,可依据式(11)得到近、远场的分界点
式中,h为隧道高度,m;w为隧道宽度,m;λ为电磁波波长,m。以温福铁路宁德段圆拱形隧道为例,起高9 m,宽13.4 m,拱形截面可近似认为与矩形截面相同。对于1.4 GHz,电磁波边界dNF=837 m;对于1.8 GHz,电磁波边界dNF=1 077 m,即当车车距离小于dNF时为近场,大于dNF时则为远场。
其中,在近场时,根据文献[19]矫正的传播模型为
在远场时,由于隧道自身特性,传播模型近似于波导模型,可通过矫正后的传播模型来近似表示。有矫正后的直通长隧道传播模型为
因此可根据近、远场划分不同模型。根据式(3)考察接收机处信号情况,设Pt=23 dBm,Gt=9.5 dBi,Gr= 9.5 dBi。在近场时,车车间距与接收功率关系如图7 所示;在远场时,车车间距与接收功率的关系如图8 所示。
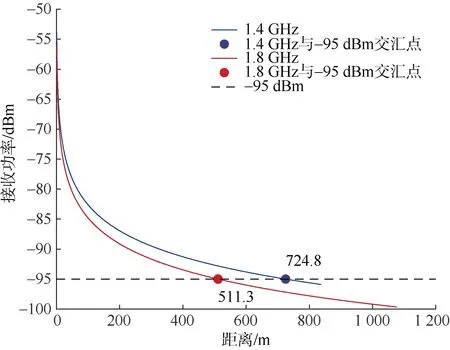
图7 隧道内近场时车车之间距离与接收功率关系Figure 7 Correlation between the distance between trains and received power in the near field in the tunnel
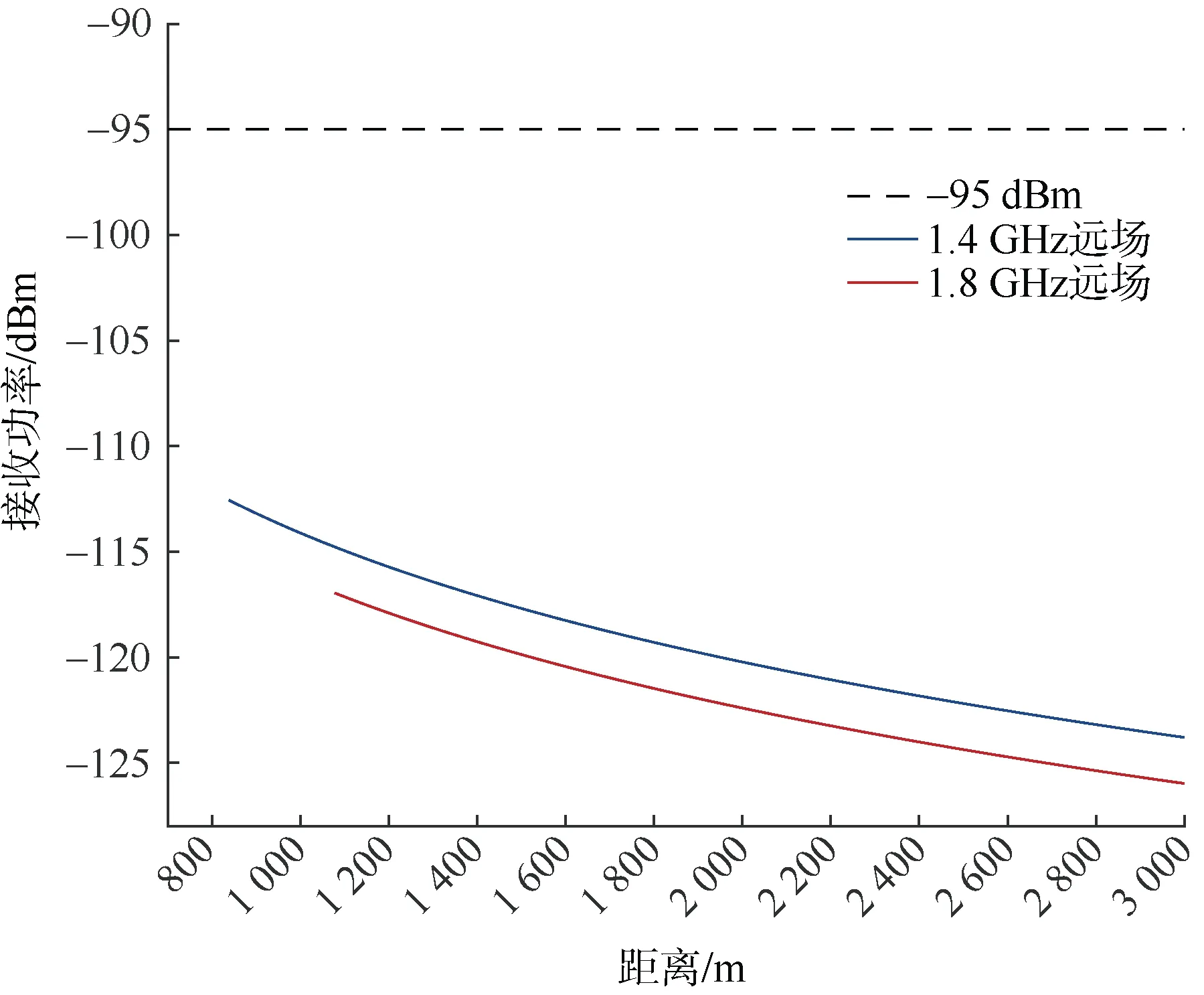
图8 隧道内远场时车车之间距离与接收功率关系Figure 8 Correlation between the distance between vehicles and the received power in the far field in the tunnel
因此,可根据车辆所处位置(位于近场或远场),通过相应模型计算数值参考接收功率衰减变化情况。考察典型接收功率为-95 dBm,根据图7 和图8 可知其属于近场区域。1.4 GHz 下的通信距离为724.8 m,1.8 GHz下的车车通信距离为511.3 m。
3.3 车车通信传输距离总结
以当前轨道交通1.4 GHz 与1.8 GHz 频点为例,计算了车车通信的传输距离极限。计算结果表明:当采用基于逻辑点对点的车车通信传输时,由于车与车之间的通信可以经过地面骨干网络传输,车车通信距离理论上可以是无限的,前提是车与基站的距离小于最大传输极限。本文研究表明,在自由空间中使用30 m 高的天线传输时,1.8 GHz 下车地通信距离可达6.575 km,1.4 GHz 下车地通信距离可达8.154 km;在采用漏缆传输时,双侧覆盖范围可达2 000 m,波导传输双侧覆盖范围可达3 636.4 m。
当采用基于物理点对点的车车通信传输时,在自由空间的非隧道区域内,由于接收机灵敏度要求,物理点对点车车通信距离不能支持大于 765.7 m(1.8 GHz 下)及923.6 m(1.4 GHz 下)的传输。在隧道区域中,物理点对点车车通信距离不能支持大于724.8 m(1.4 GHz 下)和511.3 m(1.8 GHz 下)的传输。列车自主运行时,当车车运行间距超过基于物理点对点的车车通信距离,基于物理点对点的车车通信将不足以支撑可靠的车车通信。
列车自主运行需要根据列车运行的间距选择满足传输距离的车车通信传输模式。
4 结语
将车车通信技术引入下一代列车运行控制系统中,不仅可以有效提升列车运行的安全性和效率,还能够推动智慧轨道交通的进一步发展。本文面向列车运行控制系统深入探讨了车车通信技术。首先,介绍基于车车通信的列车运行控制系统的基本原理;其次,调研当前主流的基于逻辑点对点和物理点对点的车车通信技术;最后,结合城市轨道交通车车通信典型运行场景,进行传输距离计算与分析,并在充分考虑列车运行安全和通信质量的基础上给出车车通信模式选择的建议。本研究期望为未来城市轨道交通中车车通信系统的设计和应用提供有益参考和理论支持。
猜你喜欢
控制与信息技术(2021年2期)2021-07-23
今日农业(2021年6期)2021-06-09
铁道通信信号(2020年1期)2020-09-21
电子制作(2018年19期)2018-11-14
电信科学(2016年11期)2016-11-23
爆笑show(2016年3期)2016-06-17
铁道通信信号(2016年8期)2016-06-01
儿童绘本(2016年6期)2016-05-14
中国学术期刊文摘(2016年2期)2016-02-13
中国铁道科学(2015年6期)2015-06-21