基于实时数据的变电站智能巡检机器人系统设计
2024-01-04 05:00程培军张卫华
机械与电子 2023年12期
詹 鹏,程培军,黎 翔,张卫华,王 飞
( 1.广州供电局有限公司,广东 广州 510620;2.东方电子股份有限公司,山东 烟台 264010 )
0 引言
变电站巡检主要针对变电站内的设备进行信息采集和周围环境采集,是发现设备安全隐患、确保设备可靠运行的重要方式。目前常用的巡视检修方法有人工巡检和智能化巡检。考虑到变电站厂区面积较大、设备分布范围较广,利用巡视检修机器人可以有效解决人工巡视检修效率低的问题,而且可以提升变电站智能化运行水平,利用实时化数据分析可以及时发现设备缺陷,进行消缺处理。
目前针对变电站巡检机器人的应用,文献[1]提出了基于ACO-SA算法的变电站巡检机器人路径规划;文献[2]分析了前端化目标检测技术在电力巡检中的应用;文献[3]提出了变电站智能巡检机器人巡视路线优化;文献[4]提出了变电站智能巡检机器人控制系统;文献[5]分析了基于图论的变电站巡检机器人全局路径规划;文献[6]分析了基于巡检机器人的变电所全方位管控技术。上述研究内容从多方面拓展了巡检机器人在变电站中的应用,但针对实时数据以及设备巡检平台设计的研究仍然有待提升。
本文针对变电站智能巡检机器人系统进行设计,分析了变电站主要的巡检任务,说明了基于实时数据的巡检机器人应用技术,针对所提系统进行了设计,说明了平台架构和业务流程,并进行了应用分析。
1 变电站智能巡检任务分解
1.1 变电站巡检环境
按照目前我国变电站建设形式,一般分为户内变电站和户外变电站。户内变电站设备一般为成套设备,具有高度的布局紧密性和框架整体性,设备集成度较高;户外变电站一般采用敞开式设备,通常占地面积较大,设备元件集成度不高,相比于户内变电站设备运行检修较为复杂。上述2种变电站的布局,一般都分为一次设备区和二次设备区。一次设备区主要包括主变设备区、高压配电装置区和低压配电装置区,二次设备区主要指二次设备室、蓄电池室、消防控制室和通信设备室等。按照变电站内布置原则,一般均留有设备维护通道和检修通道。这类通道可供人工、巡检机器人等进行设备巡检。某变电站典型设备区域设置的巡视点如图1所示。
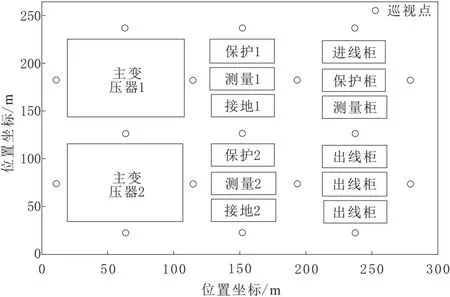
图1 巡视点位
考虑到设备布局和运行检修需求,本文采用变电站地理位置等值模型对运行检修区域进行分解,得到由实际设备布置映射后的运行检修点位。映射关系示意如图2所示。
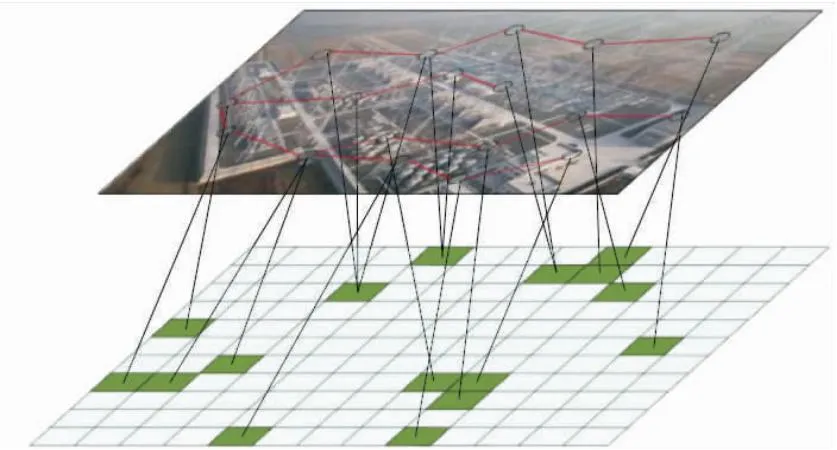
图2 映射关系
1.2 巡检数据需求分析
变电站巡检机器人巡检对象主要包括站内一次设备和二次设备。具体包括变电站内设备开关状态、表计读数、温度分布和设备外观识别。巡检数据需求如表1所示。巡检内容既包括设备外观图像、又包括温度湿度分布等内容,因此需要依靠多元异构数据和实时数据进行识别。而变电巡检机器人对于电力巡检的主要要求就是实时性和鲁棒性。因此,对于电力设备巡检过程出现的异构数据,既要保证实时性又要保证识别的准确性。
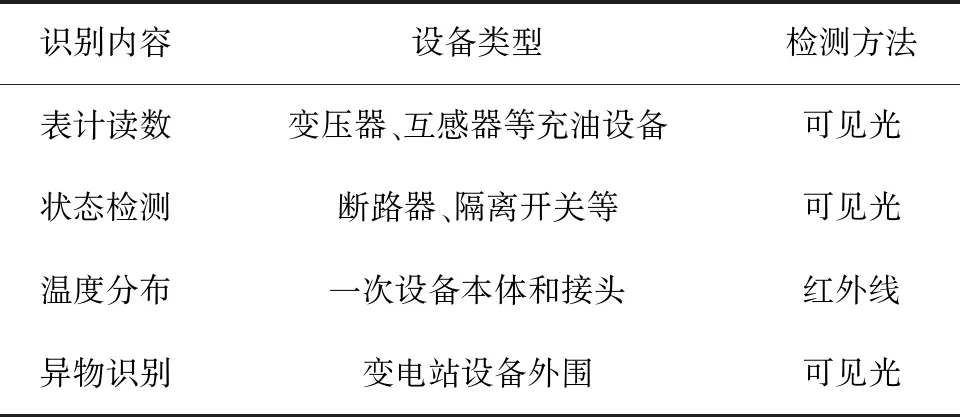
表1 巡检数据需求
目前,针对大多数智能变电站和常规变电站,需要对全网继电保护设备的运行状态、故障数据以及动作信息、告警信息、压板状态和整定值等进行在线核对和信息发布,实现专业巡视,形成全方位一体化的二次设备状态查询。通过对上述内容的监视和自动巡视以及告警,可以实现继电保护设备维修、巡视工作的针对性,从而方便电网运行人员发现设备异常,提高运行检修效率,保障电力系统运行的稳定性。
另外,通过二次设备智能巡视技术还可以实现对某些设备整定值以及软压板状态远程修改的需求,从而实现快速可靠动作。二次设备检修平台,还可以提高继电保护运行状态以及二次设备运行,维护检修的量化指标体系可靠性,提供相应的基础数据和分析方法,将高级应用嵌入到检修平台中,提升系统运行可靠性的可视性。
2 基于实时数据的巡检机器人技术分析
2.1 图像识别
图像识别技术是一次设备和二次压板状态识别的主要方法。图像识别巡检搭载高清可见光相机,拍摄设备图像,利用图像识别技术完成设备运行状态的自主识别与判断[7]。主要识别类型包括表计读数、指示灯状态、机械指示状态和开关位置等。
目前较先进的识别技术包括基于局部特征匹配的数字表自动定位识别技术、基于虚拟线段判定的阀门分合指示识别技术等,能够在识别准确率、数据可靠性等维度提升系统识别质量。
2.2 红外热成像
智能巡检系统设备搭载红外热成像仪,拍摄设备的红外图像,并自主获取设备实时温度[8]。物体辐射的红外线温度强度可用于设备故障定位和查找等功能,结合不同的成像原理,形成热成像数据库,实时分析和处理。
2.3 机器人定位巡检技术
目前,针对变电站内巡检数据动态获取的一体化控制技术主要包括基于位置、基于图像和混合视觉伺服控制模型。基于位置的控制模型是针对巡检机器人运动轨迹与期望笛卡尔坐标之间进行反馈控制的方法。对于视觉图像的方法是根据采集到的图像与期望图像进行对比,经过反馈调整机器人运动轨迹,实现运动目标的完成。混合视觉模型是针对前2种控制方法的综合,既能够根据笛卡尔坐标位置进行机器人运动轨迹的判断,也能够根据图像特征提取实现角度控制,综合判断形成机器人运动轨迹。
其运动系统包括驱动轮和转向轮。当检修机器人以恒定速度在变电站内进行运行检修巡检时,驱动轮由驱动电机进行驱动,驱动轮在地面所受摩擦力与驱动力相互抵消。当检修机器人进行转向时,需要由伺服电机进行角度控制,实现机器人运动转向。
2.4 多维数据实时感知技术
机器人感知是指通过机器人在运维检修中收集环境数据并结合自身数据分析系统对变电站内部设备运行状态和周围运行环境的综合研判过程。机器人感知技术是基于多元异构数据实时分析进行的,能够拓展多种分析及应用。运维检修机器人多维度感知,主要包括机器人视觉、触觉和环境感知模型。利用视觉感知可将目标转化为图像信息,并根据图像信息的亮度和颜色提取关键成分,得到周围环境感知内容,用于判断周围物体状态。多维度感知机器人,对于其他非图像数据也能进行有效判断。可以利用机器人内置超声传感器和视觉传感器进行周围环境因素提取。根据变电站运维检修需求,灵活调整感知光线、远红外线和局部放电感知单元等。
3 基于实时数据的巡检机器人系统设计
3.1 机器人一体化运动控制技术框架
变电站智能巡检机器人设计内容主要包括机械部分、软件部分和硬件部分。根据目前机器人运动学方程进行建模,构建面向巡检数据的实时动态数据一体化控制技术。
本文采用混合视觉伺服模型,对运行检修设备动态数据进行获取,实现一体化运动控制,解决大范围扫描与变电站内主要设备图像采集的难题。本文所提系统主要包括变电站巡检机器人、云端设备和固定相机。运行控制框架如图3所示,分为内环和外环2部分,外环负责变电站内主要设备的图像处理和图像获取,内环控制主要负责运动轨迹更新和定期巡航控制。针对目前变电站主要设备状态信息实时更新的基础,设定巡检机器人与云端设备期望位姿参考值,当巡检机器人位于巡检轨道中,则采用视觉图像伺服控制模式。提取相应设备的图像特征,将平面坐标系下的像素误差作为控制输入,调整运行检修机器人的运动轨迹,并且始终保持运动目标在固定摄影相机跟踪位置下。系统控制模型可采用PID算法,将反馈信息以时间窗口作为动态调整,结合设定像素值实现运动轨迹与检测目标之间成像的清晰程度。
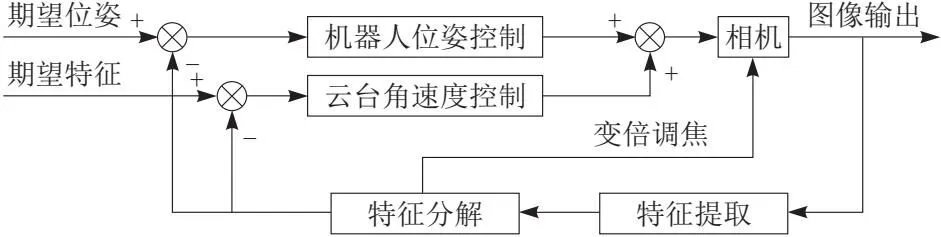
图3 运行控制框架
3.2 平台架构及业务功能
本文所提的变电站运行检修机器人综合平台,基于实时数据库,具体架构如图4所示,包括应用系统、结构方案和机器人运行本体。控制平台由主要调度和检修部门作为上级用户,基于数据总线的信息内网不属于系统底层,应用包括机器人巡检系统、统一接口平台和外部系统。其中统一接口平台与机器人巡检系统采用有线数据通信方式,与外部系统通过拓展接口实现通信,并基于统一接口规范,实现第三方巡检机器人接入应用。对于所提机器人巡检系统,主要包括机器人运动轨迹控制、数据采集上传分析系统等内容。巡检机器人系统内部设置外部服务器、服务器数据库和应用采集服务器,能够实现双向通信,并完成各项巡检任务,将数据上传并进行初步处理。

图4 平台架构
按照本文提出的平台架构,具体实现的业务功能如图5所示。能够以主站应用为核心,关联数据中心,并拓展采集服务和统一接口服务。其中统一接口服务与外部系统相连接,能够拓展相应第三方机器人的应用,实现业务的批量处理和数据的采集分析,达到变电站运行检修一体化的目的。
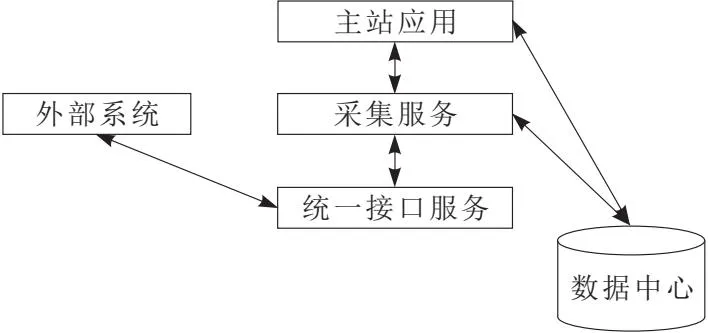
图5 业务功能
数据总线服务针对多客户端支持、通信服务以及数据同步的内容实现相应的功能。权限管理则针对用户与系统之间的授权关系进行设置。具体如图6所示。

图6 总线服务
数据总线服务从D5000平台获取相应的基础数据,实现对数据的分发,通过数据中心对数据进行处理,确保各工作站及数据库信息的同步。在数据的分析和处理过程中,需要对事件进行分类整理,通过与告警信息类别之间的匹配获取运行保护信息,并针对采样信息的异常进行核对和告警,实现故障的分析与处理。
3.3 实时巡检数据分析流程
机器人巡检系统针对实时数据的分析和处理,结合实时数据处理要求对巡检机器人工作流程进行分析,其流程如图7所示。

图7 分析流程
4 应用分析
本文选取5个变电站对所提智能巡检机器人系统进行验证。数据处理系统会统计变电站的缺陷数量并以图像的形式将数据进行展示,更直观地展示变电站的运行情况。设备状态实时请求数据以互联网的形式进行阅览有助于运行检修人员对设备状态的进一步获取。表2给出了各变电站主要测试的具体结果。由表2可知,变电站1的缺陷数量为2,运行评分为95分,变压器负载率为63%;变电站2的缺陷数量为1,运行评分为98分,变压器负载率为68%;变电站3的缺陷数量为3,运行评分为92分,变压器负载率为59%;变电站4的缺陷数量为5,运行评分为90分,变压器负载率为56%;变电站5共有3处缺陷,运行评分为94分,变压器负载率为66%。总体来说,变电站2的运行状况最好。
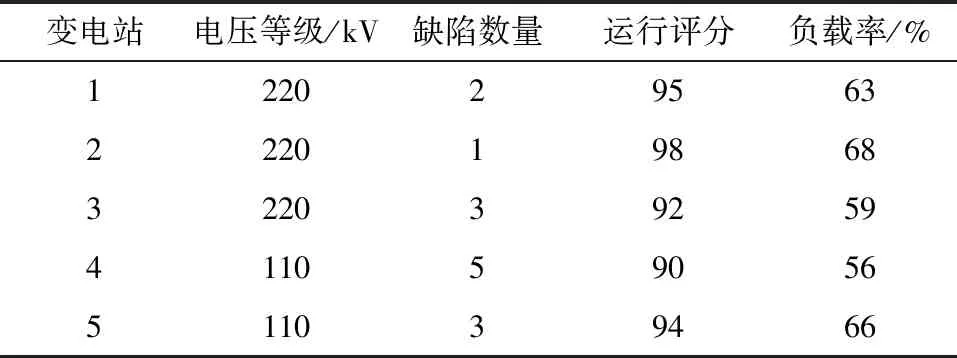
表2 线路间隔二次系统结构
利用本文方法,对变电站1进行路线巡视,得到如图8所示的运动轨迹。其中深色方框表示受阻碍区域,也就是设备放置区域;白色方框表示可运动轨迹区域,黑色实线则给出了本文系统算法确定的运动轨迹。从图8中可以看出,变电站运行检修巡视机器人,能够在含有较多设备的区域实现巡检,并确定主要设备的缺陷数量,实现所设置的功能。
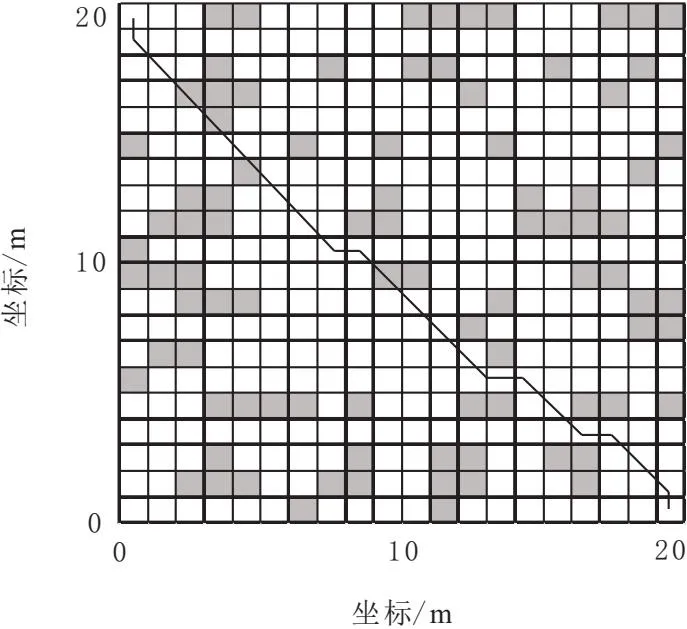
图8 巡检路径
5 结束语
本文针对基于实施数据的变电站智能巡检机器人系统进行了设计,说明了巡检机器人一体化运动控制技术框架和平台架构。针对本文系统进行应用分析,说明针对不同电压级别的变电站,本文系统能够有效检测系统的缺陷数量,从而有效对系统的运行情况进行评价。并且本文所提出的巡检机器人运动控制系统,能够有效避开障碍物,对主要的电气设备进行巡视,提升变电站智能化水平,降低运行维护人员的作业强度,提升作业效率。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
当代工人(2019年24期)2019-01-17
电子制作(2018年8期)2018-06-26
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
电子制作(2017年8期)2017-06-05
电子制作(2016年19期)2016-08-24
现代工业经济和信息化(2016年5期)2016-05-17
设备管理与维修(2016年5期)2016-03-16