微重力环境对MHD 角速度传感器性能影响研究*
2024-01-09 07:20张舒楠李醒飞周新力
传感技术学报 2023年11期
张舒楠,李醒飞*,赵 坤,周新力
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300027;2.深海技术科学太湖实验室深海传感技术中心,江苏 无锡 214028;3.天津航海仪器研究所,天津 300131)
磁流体动力学(Magnetohydrodynamics,MHD)角速度传感器具备频带宽、噪声低、精度高、功耗小、体积小等优点,且无机械饱和,对振动加速度不敏感,能够在严苛条件下工作。适合测量航天器受运行环境扰动或自身机械运动产生的1 Hz~1 000 Hz、μrad量级的高频微角振动[1]。MHD 角速度传感器研制过程中,需要考虑在轨环境中重力作用基本消失,传感器敏感元件中磁流体的流动特征可能较地面测试时发生变化,故有必要分析微重力环境对MHD 角速度传感器输出特性的影响。
上世纪80 年代至今,美国ATA 公司提出双层流体环、径向磁场、多层磁场等多种MHD 角速度传感器结构,现研制出一系列不同精度的产品[2],已在美国中继卫星反射镜实验、美国静止轨道卫星Goes-N、日本陆地观测卫星ALOS、美国月球激光通信实验等项目[3]中提供微角振动数据。由于国外技术封锁和产品禁运,国内对MHD 角速度传感器的研制相对起步较晚。兰州空间技术物理研究所的霍红庆、周海佳等[4-5]对磁路、不同重力方向下温度变化对传感器的影响进行仿真,北京遥测技术研究所的张翰等[6]、上海交通大学王坤东教授团队[3,7]研制出原理样机,天津大学李醒飞教授团队研制出带宽2 Hz~1 000 Hz 的工程样机[8],探索气泡、温度等因素的影响[9-10],提出微弱信号处理、多传感器信号融合、低频补偿等方法[11-13],现已完成初步测试并处于产业化阶段,同时不断探索基于磁场调制、多磁流体动力泵等新型传感器结构[14-15]。上述研究为MHD 角速度传感器实现更高精度指标的角振动测量提供改进依据,但未考虑在轨测量时微重力环境对传感器性能的影响。
验证待测目标受微重力影响的方法可分为:①利用仿真软件进行数值分析;②在微重力环境中进行实验,如利用落塔、热气球、抛物线飞机等地面模拟方法,或利用探空火箭、航天器等在轨飞行,可获得10-6~10-3g0之间的微重力环境,持续时间从数秒到数天不等[16]。但受空气阻力等因素影响,美国、日本等国在地面模拟实验与真实空间环境中测得的数据存在偏差[17];在轨实验成本较高,无法广泛使用。故本文采用数值仿真的方式,利用计算流体动力学(Computational Fluid Dynamics,CFD)仿真软件Fluent,针对本课题组研制的径向磁场和轴向磁场两种结构的MHD 角速度传感器,对比其在常重力环境和微重力环境下的输出情况,分析微重力环境对MHD 角速度传感器在轨性能的影响。
1 MHD 角速度传感器原理与建模
MHD 角速度传感器的工作原理如图1 所示。环形流体通道中充满导电流体,其周围存在由永磁体产生的磁场B。环形通道的两电极面用于输出导电流体运动时产生的感应电动势,两绝缘面用于避免电极之间的相互干扰。高磁导率的外壳使传感器内部形成闭合磁路,同时抑制外部磁场的干扰。
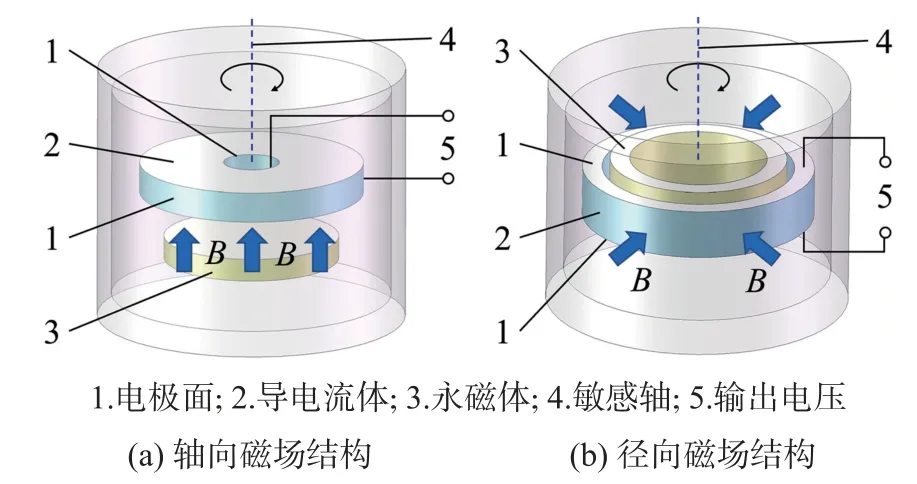
图1 MHD 角速度传感器敏感元件工作原理示意图
测量时,被测载体在MHD 角速度传感器敏感轴方向以角速度ω运动,永磁体随传感器以相同角速度运动。此时导电流体因具有惯性,相对惯性空间静止,故导电流体与永磁体产生的磁场B产生相对运动,进而切割磁感线,在两电极之间产生电动势E。
导电流体的运动状态可用N-S 方程描述为:
式中:u为流体相对速度,P为压力,ρ为密度,υ为运动粘度,ω为待测角速度,r为流体环等效半径,F为流体所受电磁力。
由于流体通道为环形,建立以流体环中心为坐标原点的柱坐标系(r,θ,z),流体相对速度u=(ur,uθ,uz),永磁体产生的磁场B=(Br,Bθ,Bz),电流密度J=(Jr,Jθ,Jz)。传感器运动时,导电流体主要在切向方向流动,切向运动的N-S方程可表示为:
以径向磁场结构为例,由于导电流体的运动为低磁雷诺数流动,可忽略其产生的诱导磁场和诱导电场[18],即Bz,Bθ≪Br,Jθ,Jr≪Jz,只考虑切向运动产生的诱导电流在外部磁场作用下产生的电磁力。由欧姆定律J=σ(E+U×B)得,切向电磁力fθ=Jz·Br-Jr·Bz=σuθ,σ为电导率。则式(4)化简为:
对式(5)进行拉式变换可得:
导电流体在轴向上产生的感应电动势E(s)=,则传感器敏感元件的传递函数为:
由上式可知,传感器输出呈现高通特性,且当频率较低(<2 Hz)时,导电流体会随环形通道一起运动,两者间的相对速度出现偏差,此时的感应电动势不能表征被测载体的真实运动状态。
当MHD 角速度传感器所测角速度幅度在mrad量级时,敏感元件的输出信号十分微弱,甚至小于μV 量级,且测量过程中会引入白噪声、电磁噪声等干扰,故需要利用信号处理电路将信号放大万倍并滤除高频噪声,得到可被利用的模拟信号。MHD 角速度传感器整机传递函数可表示为下式[12],式中ai(i=0,…,6)、bi(i=2,…,4)均为常数。
2 微重力环境
2.1 微重力加速度来源与分类
由于在轨航天器受到微弱地球引力的同时,还受到舱体所处物理环境中其他干扰力的影响,航天器内部处于微重力状态,其有效重力加速度geff可表示为:
式中:g0为地球表面的重力加速度,V为航天器运行速度,r0为地球半径,h为航天器运行轨道距地球表面的距离,f为其他干扰力引起的加速度。
根据航天器所受干扰力的特性,将其产生的加速度分为[20]:①准稳态加速度,频率小于0.01 Hz,幅值小于10-6g0,由地球引力、大气阻力、太阳辐射压、潮汐力等固有作用力引起。我国“神舟”系列飞船在轨测量的准稳态加速度不超过10-7g0。②瞬态加速度,频率在数Hz 到数百Hz,幅值在10-4g0以上,由航天器调整姿态、修正轨道、交会对接时推进器的外力与内部机械部件或乘员运动时的内力等引起,具有随机、瞬间发生等特点。③振动加速度,频率在0.1 Hz~300 Hz 之间,幅值在10-6g0~10-3g0之间,是电机、太阳翼、天线等设备工作时产生的周期性振动。
2.2 流体在微重力环境中的特性
由上文可知,微重力环境中重力水平降低5~6个数量级,物体内部没有相互作用力,流体部分运动特征可能不再遵循常重力环境下的科学规律:
①静压梯度趋于零。流体静力学问题中,如果流体只受到重力作用,则压力梯度与重力平衡,有:
式中:ρ为流体密度,P为流体压强,g为重力加速度。常重力环境下,流体静压在重力方向上分布不均匀。但在微重力环境中,静压梯度随geff的减小而几乎消失,可以在有限范围内提供均匀的内部压力。
②沉降、悬浮等分层现象基本消失。常重力环境中,固体颗粒、不相溶液滴、气泡等物质在流体中受到浮力的影响,根据密度的不同沉降或上浮,其运动速度(即Stokes 速度)可以表示为[21]:
式中:d为物体直径,μ为液体动力粘度。微重力环境中,物体所受浮力减小5 个~6 个数量级,Stokes速度趋于零,不论物体密度如何,均会在流体任意位置悬浮。不同密度的流体之间分层流动消失,各组分混合在一起,没有清晰的分界面。
③浮力对流现象基本消失。常重力环境下,温度梯度和浓度梯度会造成流体密度不均匀,密度高的部分会在浮力作用下沿重力方向流动,产生Rayleigh-Taylor 不稳定性对流。在对流问题中引用Rayleigh数Ra,在复杂流场中还会引入Grashof 数Gr[22]:
式中:υ为运动粘性系数,β为热膨胀系数,κ为热扩散系数,ΔT为该区域内上下表面之间的温差,l为特征长度。微重力环境中,geff趋于零时Ra 和Gr 相应减小,难以激发浮力驱动的对流。温度梯度或浓度梯度改变表面张力而引起的Marangoni 对流、重力跳动引起的对流[21]等地面上不明显的对流突显出来。
微重力环境中,流体在常重力下存在的物质沉浮、浮力对流等浮力引起的流动现象明显减少,流体本身的流动不再受其掩盖或影响,一些微小流动现象能够稳定形成,表面张力、内聚力等次级力作用效果更加明显,流体部分行为特征可能与常重力下存在差异。
3 微重力对传感器影响的仿真分析
3.1 磁场-流场耦合数值仿真方法
计算MHD 角速度传感器中导电流体在磁场中流动产生的电动势时,首先需要计算永磁体在流体环区域形成的磁场分布。在低频电磁场有限元软件ANSYS Maxwell 中导入图1 所示的MHD 角速度传感器结构模型,设置流体通道的内径为ri,外径为ro,高为h,导电流体材料X 与永磁体材料Y 的物理参数如表1 所示,采用非线性B-H 曲线定义传感器外壳材料Z。不添加电流和电压激励源,整体网格大小设置为0.5 mm,对磁场施加气球边界条件。图2为两种结构的流体环区域磁场强度分布云图,轴向磁场结构的平均磁感应强度为0.159 7 T,径向磁场结构的平均磁感应强度为0.266 0 T。
表1 流体材料X 与永磁体材料Y 的物理参数(20 ℃)
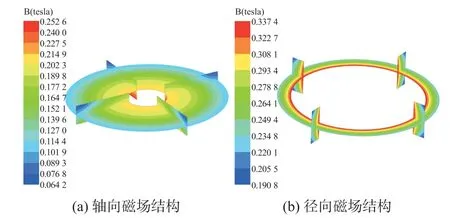
图2 流体环区域磁场强度分布云图
在基于有限体积法的CFD 仿真软件Fluent 中导入流体环区域的磁场分布数据,利用MHD 模块计算外部磁场与导电流体相互作用的结果。此处流体运动状态为不可压缩的非定常流动,故求解器设置为基于压力,压力速度耦合方案选择PISO 格式,并设置重力加速度。将环形流体通道的运动定义为以传感器敏感轴为旋转轴、速度为sin(2π×20×t)°/s 的正弦运动,记录5 个周期内环形流体通道的旋转速度vn(此处以内壁的绝对切向速度为参考)、流体相对切向速度uθ与流体区域的电场强度ez。以径向磁场结构为例,仿真结果如图3 所示,流体相对切向流速呈正弦变化,与流体区域的电场强度成正比,对电场强度进行积分可得到流体流动时切割磁场所产生的电动势。
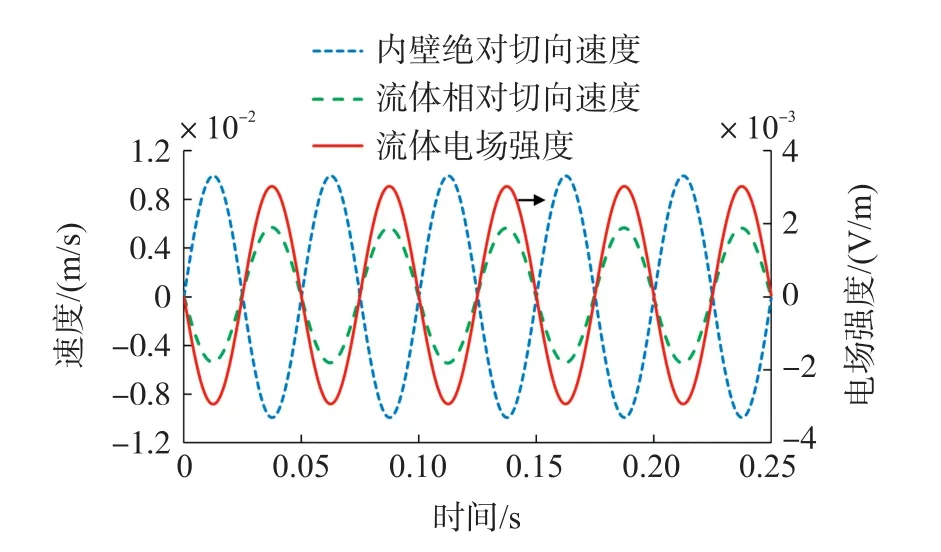
图3 MHD 角速度传感器(径向磁场结构)内壁绝对切向速度、流体相对切向速度、流体电场强度的仿真结果
重力条件不变时,按照上文所述步骤,将流体环角速度设为A×sin(2π×f×t)°/s,分别进行固定幅值A、改变频率f的扫频仿真和固定频率f、改变幅值A的扫幅仿真,仿真参数如表2 所示。对每种频率和幅值下的内壁绝对切向速度、流体环输出电动势、流体环相对切向速度进行仿真,可得到该重力条件下传感器敏感元件的通频带响应和线性响应关系。改变Fluent 中重力加速度设置,重复上述步骤,即可观察微重力环境对传感器敏感元件输出特性的影响。
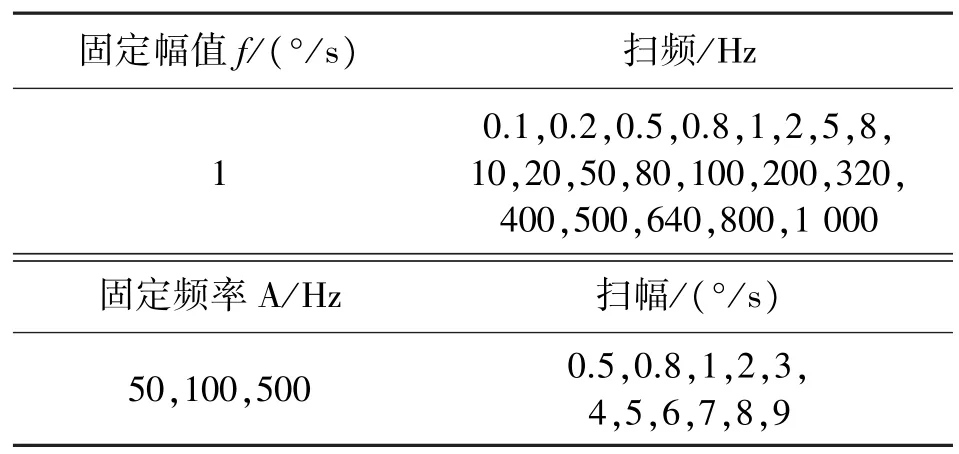
表2 仿真参数
3.2 重力条件设置
常重力环境下,参考本课题组实验室环境的重力条件,将Fluent 仿真中的重力加速度方向设置为与MHD 角速度传感器敏感轴重合,如图4 所示,大小设置为9.801 1 m/s2。
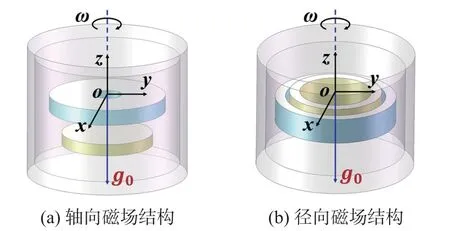
图4 常重力环境下有效重力加速度方向示意图
微重力环境下,航天器运行期间会不断调整飞行姿态,传感器所受有效重力加速度方向无法确定。以流体环中心为原点建立空间直角坐标系o-x-yz,由于传感器两种结构均为关于z轴的旋转体,有效重力加速度方向在各平面的情况均可化为在zoy平面,与传感器敏感轴之间存在任意夹角α。①对于径向磁场结构传感器,结构在zoy平面具有对称性,可只讨论夹角α∈0°~90°,任意取夹角α=0°、30°、60°、90°对该范围进行遍历;②对于轴向磁场结构传感器,流体环区域磁场分布在zoy平面内不具有对称性,需讨论夹角α∈0°~180°,任意取夹角α=0°、30°、60°、90°、135°、180°对该范围进行遍历,并与径向磁场结构对比。以径向磁场结构为例的有效重力加速度方向示意如图5 所示。

图5 微重力环境下径向磁场结构有效重力加速度方向示意图
由2.1 小节可知,瞬态加速度幅值较大,且具有随机性。国际空间站明确了在轨微重力实验期间三类加速度的限值[23],尽可能避免调整姿态与轨道、舱体交会或分离、乘员大幅度活动等明显运动,可根据需求进行隔振处理,减小瞬态加速度与振动加速度对实验的影响。故参考准稳态加速度的幅值,将有效重力加速度大小设为g1=10-6g0=9.8×10-6m/s2,根据其在各坐标轴上的分量,设置Fluent 仿真中的重力条件,以此模拟传感器受到不同方向的微重力作用。
3.3 常重力环境和微重力环境下仿真结果对比
与常重力环境下敏感元件输出特性进行比较时,定义标度系数相对误差eamplitude、相位偏差ephase如下:
式中:Sα为微重力下有效重力加速度方向与传感器敏感轴存在夹角α时敏感元件的标度因数,S0为敏感元件在常重力下的标度因数。按照前文所述仿真步骤,可得各重力条件下两种结构的MHD 角速度传感器敏感元件的频响曲线仿真结果,如图6、图7 所示。
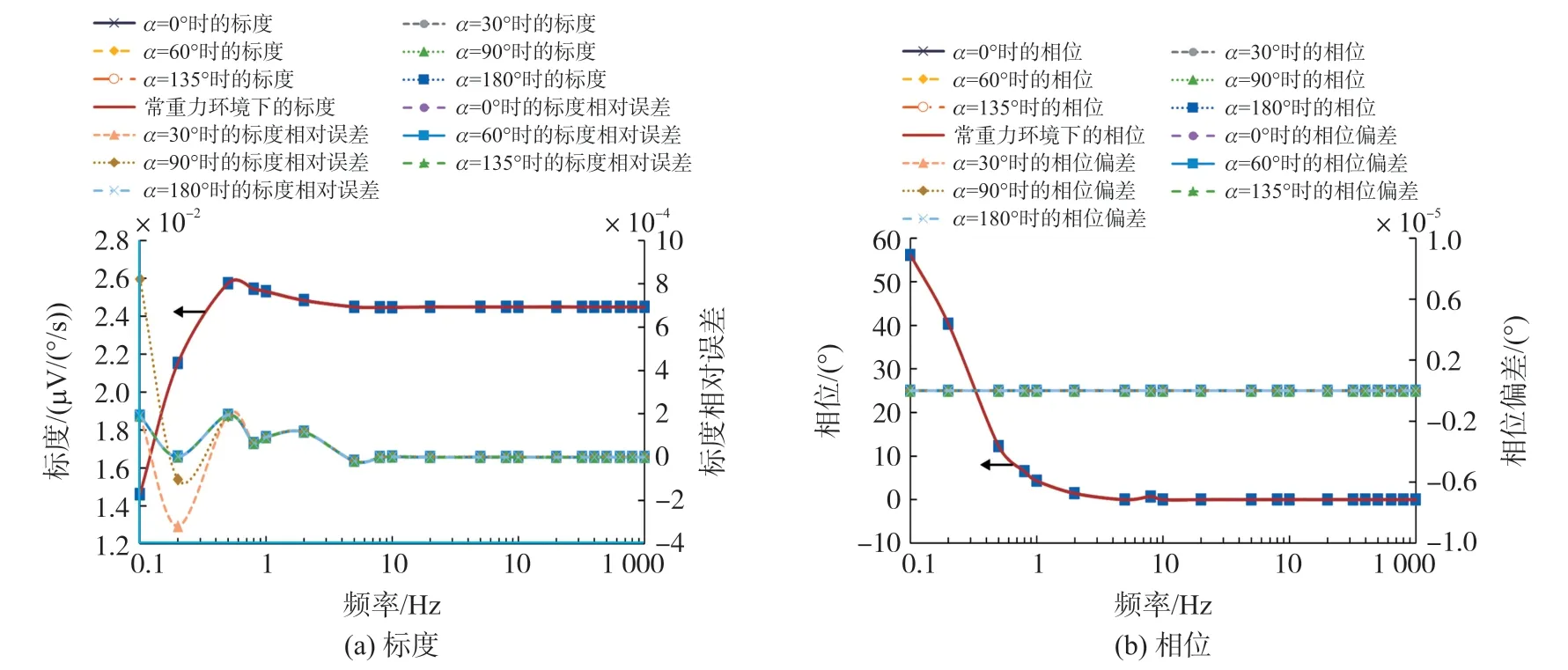
图6 各重力条件下轴向磁场结构敏感元件频响曲线仿真结果
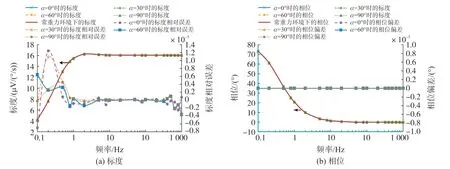
图7 各重力条件下径向磁场结构敏感元件频响曲线仿真结果
可以看出,重力加速度大小设为10-6g0后,随着重力加速度方向的改变,两种不同结构的MHD角速度传感器敏感元件的输出相位基本不发生变化,但标度存在微小偏差,且变化趋势相同,均表现为0.8 Hz~1 000 Hz 内的标度相对误差整体变化比较平稳,0.1 Hz~0.8 Hz 内的标度相对误差波动较大,相差1 个~2 个数量级,如径向磁场结构的敏感元件在0.8 Hz~1 000 Hz 内的标度相对误差绝对值不超过0.000 4%,在夹角α=0°、频率f=0.2 Hz 时达到最大值0.001 2%。对比两种不同结构的MHD 角速度传感器敏感元件仿真结果可得,轴向磁场结构的标度相对误差绝对值在0.000 000 6%~0.08%之间,径向磁场结构的标度相对误差绝对值在0.000 004%~0.001 2%之间,相较于轴向磁场结构,相对误差最大值减小1 个数量级,且误差波动小,输出更加稳定。
存在以上现象的原因可能有以下三点:①导电流体的流动方向除主要的切向流动外,存在径向、轴向的次要流动,即二次流现象。频率低于1 Hz 时二次流强度较大;大于1 Hz 时二次流强度开始急剧衰减,相较1 Hz 以下时衰减2 个数量级[24],故低频段二次流现象影响流体流动的稳定性,切向速度可能存在一定失真,导致数值仿真中低频段的标度相对误差相较于高频段出现较大无规律波动。②随着磁场强度的增大,二次流强度明显减弱,且范围减小,流动更加稳定[24]。径向磁场结构的平均磁感应强度较大,相较于轴向磁场结构,流体流动的稳定性更好。③Fluent 计算结果存在随机误差,导致相同条件下仿真结果有较小偏差,且处理数据时会引入量化误差。
不同结构的航天器在不同运动姿态下所产生的微角振动频率有所不同,如由动量轮转动不平衡引起的角振动在10 Hz~200 Hz,遥感26 号卫星滚动方向在100 Hz 存在角扰动[25],OICETS 卫星在300 Hz~800 Hz 之间存在多个振动峰值[26]。结合航天器结构角扰动频率特点与MHD 角速度传感器2 Hz~1 000 Hz 的工作频率,探究传感器敏感元件在微重力环境中的输出线性度时,选取50 Hz、100 Hz、500 Hz 分别代表低、中、高频角振动,对三个频率下两种不同结构的传感器敏感元件输出线性度进行仿真。仿真结果如图8、图9 所示,在3 个频率下,随着重力加速度方向的改变,两种结构传感器的输出线性度基本不发生变化,线性拟合度均为1,输出电压相对误差绝对值均不超过0.001%。

图8 轴向磁场结构敏感元件输出线性度仿真结果
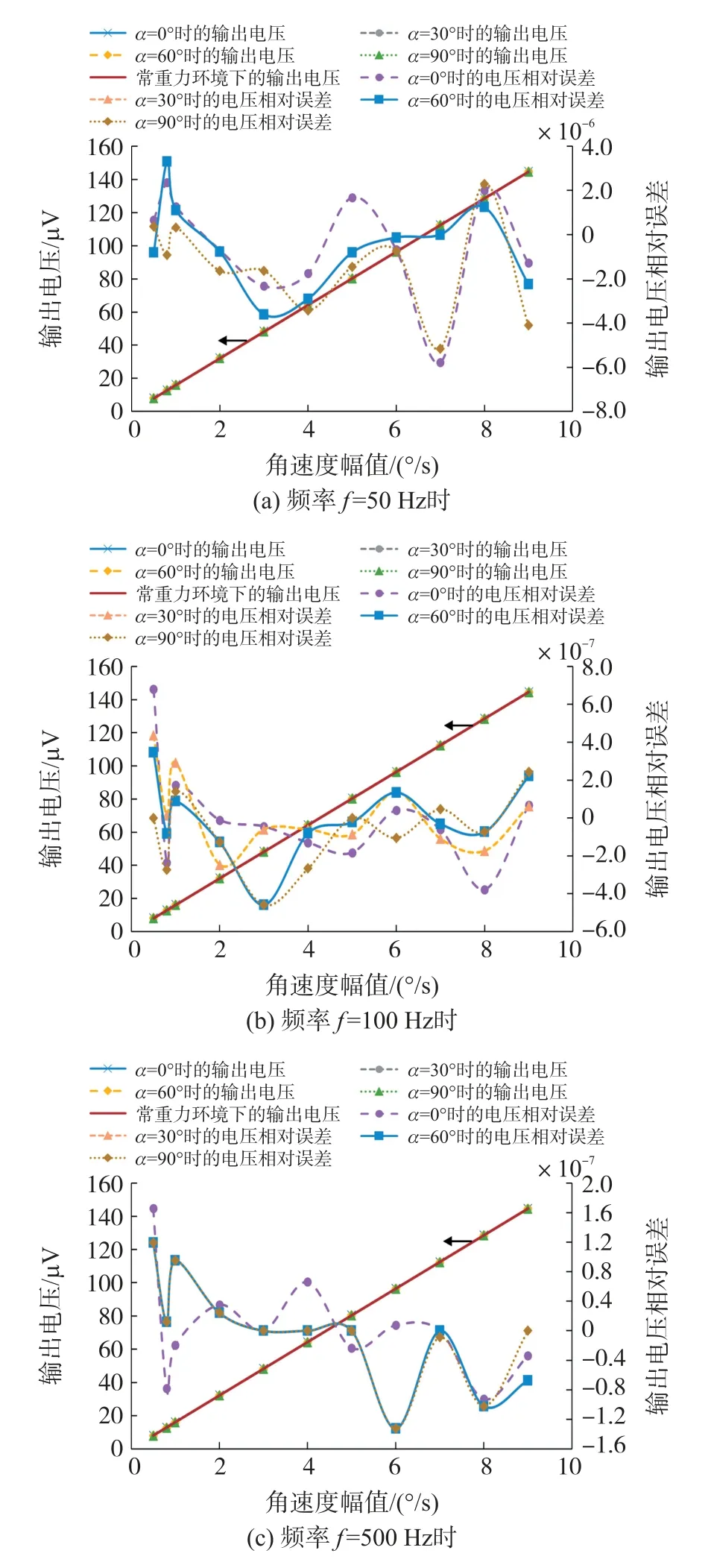
图9 径向磁场结构敏感元件输出线性度仿真结果
整体上看,有效重力加速度变化时,轴向磁场结构敏感元件的标度相对误差在0.1%以下,相位偏差小于1×10-5°;径向磁场结构敏感元件的标度相对误差为0.001%量级,较该结构传感器标度重复性测试的相对误差最大值3.7%[27]减小3 个数量级,相位偏差小于1×10-5°;两种结构的输出线性度均为1。
4 结论
为研究MHD 角速度传感器在轨测量微角振动时,微重力环境对传感器内部磁流体流动状态与传感器输出特性的影响,本文利用仿真软件Fluent,针对两种不同结构的MHD 角速度传感器,对常重力环境和航天器不同姿态的微重力环境下传感器内部磁流体运动状态与敏感元件输出电压特性进行数值计算。仿真结果表明,相较于常重力环境,微重力加速度方向随航天器姿态调整而改变时,轴向磁场结构敏感元件的标度相对误差不超过0.1%,相位偏差小于10-5°;径向磁场结构敏感元件的标度相对误差不超过0.01%,相位偏差小于10-5°,低于标度重复性测试相对误差3 个数量级;两种结构的输出线性度均为1。
猜你喜欢
玉溪师范学院学报(2023年3期)2023-08-31
计算机仿真(2021年9期)2021-11-17
科学与信息化(2020年23期)2020-09-06
中学生数理化·高一版(2017年3期)2017-07-08
传感技术学报(2017年2期)2017-04-13
河北工业大学学报(2016年6期)2016-04-16
传感器世界(2016年11期)2016-03-25
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
技术经济(2014年10期)2014-02-28